自动控制原理 第五章(第二次课)
自动控制原理第五章

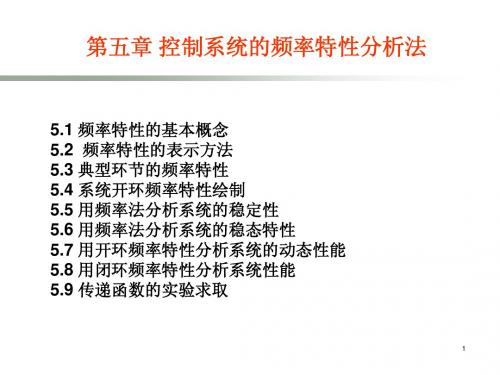
1第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n -+⋅⋅+⋅⋅⋅+=2t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1 若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t 稳态响应为:t j t j ss e A eA t y ωω⋅+⋅=-)( 而)(21)()(22ωωωωωj G R j j s s R s G A m j s m -⋅-=+⋅+⋅⋅=-= )(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m t j m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即3φωωj e j G j G )()(=φωωj e j G j G -=-)()( ∴][)(21)()()(φωφωω+-+--⋅=t j t j m ss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m=)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
自动控制原理第五章-2
稳定。
Im
1 Kg
wg
Re
(wc )
wc
w
开环对数幅相曲线上的幅值裕度和相角裕度
-Kg(dB)
Kg(dB)>0
K g (dB) 20 lg
1 20 lg G ( jwg ) H ( jwg ) G ( jwg ) H ( jwg )
若系统稳定,则:Kg>1(K(dB)>0),r>0。 一般,为确定系统的相对稳定性,描述系统的稳定程度, 需要同时给出幅值裕度和相位裕度两个量,缺一不可。 工程上,一般取:
1 T w 1
2 2
(w) arctanTw
M (0) 1, M r 1, wr 0, wb 1/ T ts 3T 3 / wb , tr 2.20T 2.20 / wb
( 0.05)
T 2
2、二阶系统 R(s)
_
2 wn s( s 2wn )
K g (dB) 10dB r 300 ~ 600
(K g (dB) 6dB)
判断系统稳定的又一方法
0
h(dB) 0
h 1
180 G( jc )H ( jc )
h 20 log G ( j g ) H ( j g )
1 h G( j g ) H ( j g )
2. 带宽频率b
当系统闭环幅频特性的幅值M()降到零频率幅值的0.707(或零分贝值以下3dB) 时,对应的频率b称为截止频率。0~b的频率范围称为带宽,它反映系统的快速 性和低通滤波特性。
北航机电控制工程基础(自动控制原理)第五章2-典型环节频率特性

北京航空航天大学
二、积分环节 Integral links 1、伯德图
机电控制工程基础
K G (s) s
Fundamentals of Mechatronic Control Engineering
K G ( j ) j
K A( )
K ( ) 0 arctan j 0 2
幅值
机电控制工程基础
袁松梅教授 Tel:82339630
下半个圆对应于正频率部分,而上 半个圆对应于负频率部分。
Email:yuansm@
北京航空航天大学
四、振荡环节Oscillation link 2、伯德图 讨论 0
机电控制工程基础
1 时的情况。当K=1时,频率特性为:
K Kn G( s ) 2 2 2 T s 2Ts 1 s 2 n s n 2
G( s) K , G( j ) K
相频特性: ( )
1、伯德图
幅频特性:A( ) K ;
0
;
L( ) / dB
20log K 20log K 20log K
K 1
对数幅频特性:
K 1 lg
0 K 1
( )
180
0 L( ) 20 lg K 0 0
1.0 -45 100 -89.4
1 1 当 0时, (0) 0;当 时, ( ) ;当 时, () 。 T T 4 2
当时间常数T 变化时,对数幅频特性和对数相频特性的形状都不变,仅仅是根据转折 频率1/T 的大小整条曲线向左或向右平移即可。而当增益改变时,相频特性不变,幅 频特性上下平移。
K P ( ) 1 T 2 2 KT Q ( ) 1 T 2 2 Q ( ) T P( )
自动控制原理第五章课后习题答案(免费)[1]
![自动控制原理第五章课后习题答案(免费)[1]](https://img.taocdn.com/s3/m/11139471f46527d3250ce001.png)
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
《自动控制原理》第五章:系统稳定性
5.2 稳定的条件
当σi和λi均为负数,即特征根的 σi和λi均为负数, 均为负数 实部为负数,系统是稳定的; 实部为负数,系统是稳定的; 或极点均在左平面。 或极点均在左平面。
5.3 代数稳定性判据
定常线性系统稳定的充要条件 定常线性系统稳定的充要条件是特征方程的根具有负 充要条件是特征方程的根具有负 实部。因此,判别其稳定性,要解系统特征方程的根。为 实部。因此,判别其稳定性,要解系统特征方程的根。 避开对特征方程的直接求解,可讨论特征根的分布, 避开对特征方程的直接求解,可讨论特征根的分布,看其 是否全部具有负实部,并以此来判别系统的稳定性,这样 是否全部具有负实部,并以此来判别系统的稳定性, 也就产生了一系列稳定性判据。 也就产生了一系列稳定性判据。 其中最主要是E.J.Routh(1877 )h和Hurwitz( 其中最主要是E.J.Routh(1877年)h和Hurwitz(1895 E.J.Routh(1877年 年)分别提出的代数判据。 分别提出的代数判据 代数判据。
习题讲解: 习题讲解:
µ
G1
Q21
G1
h2
k1 k1 G1 ( s ) = , G1 ( s ) = (T1s + 1) (T1s + 1) k1k 2 G0 ( s ) = (T1s + 1)(T2 s + 1)
kp
G0 ( s ) G(s) = 1 + G0 ( s ) K p
5.4 Nyquist稳定性判据 Nyquist稳定性判据
系统稳定的条件? 系统稳定的条件?
5.2 稳定的条件
d n y (t ) d ( n −1) y (t ) dy (t ) 线性系统微分方程: 线性系统微分方程: n a + an −1 + L + a1 + a0 y (t ) n ( n −1) dt dt dt d m x(t ) d ( m −1) x(t ) dx(t ) = bm + bm−1 + L + b1 + b0 x(t ) m ( m −1) dt dt dt d n y (t ) d ( n −1) y (t ) dy (t ) + a( n −1) + L + a1 + a0 y (t ) = 0 齐次微分方程: 齐次微分方程: an n ( n −1) dt dt dt an s n + an −1s n −1 + L + a1s + a0 = 0 设系统k 设系统k个实根
自动控制原理(胡寿松版)完整第五章ppt课件

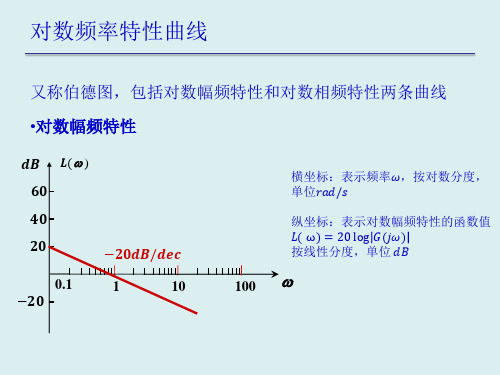
-20
φ (ω )
ω=0.1 L(ω )=20lg0.1=-20dB 90
对数相频特性:φ (ω )=90o 0 0.1
1
10ω
第二节 典型环节与系统的频率特性
4).惯性环节
G(s)=Ts1+1
G(ωj
)=
jω
1 T+1
(1) 奈氏图
A(ω
)=
1 1+(ω T)2
φ (ω )= -tg-ω1 T
取特可殊以点证:绘明ω制:=0奈氏图近似方I法m : AA图心半A点(ω(ω(是 , 圆ω,))=以 以 。惯=)0然=根ωω0(1性.171==/后据0/环2∞27为T将幅1节φ,jφo半φ它频的(ω)(ω径为(ω奈们特))=的圆)=氏平-性=09-o0滑4和o5连o相ω接频起∞特来0性-。求45ω=出T1特殊ω1=0Re
5)二阶微分环节 s 2 /n 2 2s /n 1(n 0 ,0 1 )
6)积分环节 1 / s
7)微分环节 s
第二节 典型环节与系统的频率特性
(2)非最小相位系统环节
1)比例环节 K (K0)
2)惯性环节 1/( T s1 ) (T0) 3)一阶微分环节 Ts1 (T0)
4)振荡环节 1 /( s 2 /n 2 2 s /n 1 )(n 0 ,0 1 )
第一节 频率特性
系统输入输出曲线 定义频率特性为:
r(t) c(t)
r(t)=Asinωt
G(ωj )
=|G(jω)|e j G(jω) =A(ω )e φj (ω )
A 0
幅频特性: t A(ω )=|G(jω)|
G(jω)
A G(jω )
相频特性: φ (ω )= G(jω)
自动控制原理第五章第二部分
当L(w=0时:
L(w
)
20
lg
K
w
0K
wv
I型系统
斜率为-20db/dec的低频段渐近线或其延长线与横轴的 交点的频率值与开环放大系数K相等。
II型系统
斜率为-40db/dec的低频段渐近线或其延长线与横轴的 交点的频率值的平方与开环放大系数K相等。
例1:已知某最小相位系统由频率响应实验获得的对数幅 频曲线如图所示,试确定其传递函数。
3.开环对数幅频特性:
L(w)
60
40dB / dec
40
转折频率 w1 1
w2 2
w3 20
环节 惯性 一阶微分
振荡
20
60dB / dec
0
0.1
12
10 20
100 w
20
40dB / dec
40
80dB / dec
传递函数的频域实验确定
1.频率响应实验
Asinwt
L(w )
20dB / dec
0dB / dec
20
20dB / dec
0
0.1
1
20
w
40dB / dec
解: (1)确定系统积分环节的个数
低频段的渐近线为-20dB/dec 1
(2)确定系统传递函数
K ( 1 s 1)
G(s)
0.1 s(s 1)( 1
s 1)
20
L(w )
一阶微分环节 二阶微分环节
一点+一斜率确定初始段渐近线
(4)从低频渐近线开始,沿w 增大的方向,每遇到一个
转折频率改变一次渐近线斜率,直到绘出转折频率最高 的环节为止;
自动控制原理第5章
8
二、图形表示法
1.极坐标图(幅相频率特性图;奈奎斯特图) 1.极坐标图(幅相频率特性图;奈奎斯特图) 极坐标图 随着频率的变化,频率特性的矢量长度和幅角也改变。 随着频率的变化,频率特性的矢量长度和幅角也改变。 当频率ω 变化到无穷大时, 当频率ω从0变化到无穷大时,矢量的端点便在平面上画出一 条曲线,这条曲线反映出ω为参变量、模与幅角之间的关系。 条曲线,这条曲线反映出ω为参变量、模与幅角之间的关系。 通常称这条曲线叫做幅相频率特性曲线或奈奎斯特曲线。 通常称这条曲线叫做幅相频率特性曲线或奈奎斯特曲线。画 有这种曲线的图形称为极坐标图。 有这种曲线的图形称为极坐标图。
− j arctan 2 ζT ω 1−T 2ω 2
幅频特性 相频特性
A(ω ) =
ϕ (ω ) = − arctan
23
典型环节的频率特性
9
2.博德图(对数频率特性图) 博德图(对数频率特性图) 博德图 两张图构成 一张是对数幅频图 一张是对数相频图 构成: 对数幅频图, 对数相频图。 由两张图构成:一张是对数幅频图,一张是对数相频图。 两张图的横坐标都是采用了半对数坐标。 两张图的横坐标都是采用了半对数坐标。
10
对数幅频特性图的纵坐标是频率特性幅值的对数值乘20, 对数幅频特性图的纵坐标是频率特性幅值的对数值乘20, 是频率特性幅值的对数值乘20 即 L(ω ) = 20 lg A(ω ) 表示,均匀分度,单位为db。 表示,均匀分度,单位为db db。 对数相频特性图的纵坐标是相移角φ(ω),均匀分度,单 对数相频特性图的纵坐标是相移角φ 是相移角 均匀分度, 位为“ 位为“度”。 对数幅频特性图绘的是对数幅频特性曲线, 对数幅频特性图绘的是对数幅频特性曲线, 对数相频特性图绘的是对数相频特性曲线。 对数相频特性图绘的是对数相频特性曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G( j0 ) 180 G( j) 0 90
如果 arctan arctan arctan
2
3
180 () 90
如果 arctan arctan arctan
2
3
幅相曲线会与负实轴相交
18
5-4 系统开环频率特性的绘制
自动控制原理
解方程 arctan arctan arctan
开环传递函数:G(s) G1(s) G2(s)G3(s) G4(s) 开环频率特性:G( j) G1( j)G2( j)G3( j)G4( j)
A()e j A1()e j1 A2 ()e j2 A3 ()e j3 A4 ()e j4
4
5-4 系统开环频率特性的绘制
自动控制原理
对数幅频和相频特性
20 20dB/dec
0 0.1
1
-20
10
L() 20lg
() 900
dL() d lg
20
dB dec
( ) 90
0
90
对数频率特性曲线
27
微分环节L()
自动控制原理
① G(s)= S ② G(s)= 2S ③ G(s)= 0.1S
L()dB
②与0分贝线交点频率?斜率?
自动控制原理
(2)积分环节
传递函数: GG((Ss) K1
S
频率特性: G( j) 1
j
L( ) dB
20
-20dB/dec
0 0.1
1
-20
10
对数幅频和相频特性
L() 20lg
() 900
斜率:
dL() d lg
20 dB dec
( ) 90 0
90
25
1( )
对数频率特性曲线
积分环节L()
G(
j)
(
K (j 1) j)2 (Tj 1)
起点: G( j0 ) 180 终点: G( j) 0 180
() 180 arctg arctgT
0
T
T
j
0
15
5-4 系统开环频率特性的绘制
自动控制原理
例5.4 绘制 G ( S ) Ke s 的幅相曲线。
TS 1
①
G(s)=
1 s
②
G(s)=
10 s
自动控制原理
③
G(s)=
0.2 s
L()dB②与0分贝线交点频率?斜率?
40
20
[-20]
[-20]
0dB
0.1 0.2
12
10 20
10
-20
[-20] -40
26
5-3 典型环节的对数频率特性
自动控制原理
(3)微分环节
L() dB
G(S) S
G( j) j
G( j) 1 j 1
L() 20lg 2 1
() tg 1
()
L()
0 0.5 1 2 4 5 8 20 0 -26.60 -450 -63.40 -760 -78.70 -830 -870
00 -0.97 -3.01 -7 -12.3 -14.1 -18.1 -26
lg 7 0.845 lg 8 3lg 2 0.903 lg 9 2lg 3 0.954
21
自动控制原理
5-3 典型环节的对数频率特性
自动控制原理
对数相频特性坐标图 横坐标刻度先疏后密
N
纵坐标均按线性分度 () i () i 1
横坐标是角速率 按 lg 分度, 10倍频程,用dec 表示
S(TS 1)
解:
G( j)
K (- j 1) j(T j 1)
K ( (T 2
T) 2 1)
K(1 T2) j (T 22 1)
相频特性为 () arctan 900 1800 arctan T
幅频特性为 A() K 22 1 T 2 2 1
0
Im
起点: G( j0 ) 270 o 终点: G( j) 0 270 o
L() dB 20 10
0
(rad / s)
-10
-20
-30
-40
10 -2
10 -1
100 2 3 4 10 1
20
5-3 典型环节的对数频率特性
对数分度: lg 2 0.301
lg 3 0.4771 lg 4 2lg 2 0.602 lg 5 0.699 lg 6 lg 3 lg 2 0.778
称为非最小相位系统。
2
5-2 典型环节的频率特性
自动控制原理
最小相位这一名称来源于通讯科学,意思是:如果有 几个稳定的传递函数,它们的幅频特性函数完全相同, 那么其中右半平面没有零点的那个函数,其相频特性 函数的绝对值必为最小。也就是输出正弦信号相对于 输入正弦信号的相移量最小。
2(2S 1) G1(S) S(5S 1)
Im
K(T1 T2)
0 Re
0
13
5-4 系统开环频率特性的绘制
自动控制原理
G(S)
S
(T1S
K 1)(T2 S
1)
14
5-4 系统开环频率特性的绘制
自动控制原理
例5.3
已知G(S)H (S)
K( S 1),
S 2 (TS 1)
T, , K 0
试分析并绘制>T和<T情况下的幅相曲线。
解:
1型系统
0+
10
5-4 系统开环频率特性的绘制
自动控制原理
例题2:绘制 G(S)
K
的幅相曲线。
(T1S 1)(T2S 1)
解: G( j)
K
(T1j 1)(T2j 1)
求交点:
起点: G( j0) K0 终点: G( j) 0 90 2
G(
j)
K[1T1 T2 2 j(T1 (T12 2 1)(T22 2
L()
20lg
2T 2+1 20lg1 0(dB)
低频时的对数幅值曲线是一条0分贝的直线
29
5-3 典型环节的对数频率特性
自动控制原理
高频段 1 , L() 20lg 2T 2 1 20lg T (dB)
T
高频时的对数幅频特性曲线是一条斜率为-20dB/dec的直线
高频段斜率: dL( )
Bode图的坐标形23 式(对数频率特性)
5-3 典型环节的对数频率特性
自动控制原理
(1)比例环节
L ( ) dB
传递函数: G(s) K
K>1
K=1
频率特性 (S j)
0
K<1
G( j) Ke j00
( )
对数幅频和相频特性
L() 20lg K
() 0
0
比例环节对数频率特性曲线
24
5-3 典型环节的对数频率特性
自动控制原理
Nyquist图
奈奎斯特图
简称奈氏图
能在一幅图上表示 出系统在整个频率范 围内的频率响应特性 (直观)。
2.缺点
不能清楚地表明 开环传递函数中每 个环节(参数)对系 统的性能影响。 (手工绘图麻烦)
Imag Axis
2
Im
1
Re[G( j)]
0 -1
A( )
3 0
()
Re
Im[G( j)]
-2
2
-3
-4
1 G( j ) A()e j ()
0
-5
-3
-2
-1
0
1
2
3
Rea l Axis
6
5-4 系统开环频率特性的绘制
自动控制原理
G(
j)
(
K (1 j 1)( 2 j 1)( m j j) (T1 j 1)(T2 j 1)(Tn
1)
j 1)
nm
▪ 幅相曲线(Nyquist)图的3个要点
Im
0 Re
0
12
5-4 系统开环频率特性的绘制
自动控制原理
G(
j)
K(T1 T2 ) (T122 1)(T222 1)
K(1T1 T2 (T122 1)(T22
2 2
)
1)
j
求与实轴交点:
令Im[G( j)] 0
x
1 T1T2
1 T1T2
G(
jx
)
KT1T2 T1 T1
G( j0 ) K (T1 T2 ) j
nm
ν=1,I型系统
起点: 0+ 1个积分环节项产生的相角是 90
曲线是一条渐近于平行与负虚轴的线段。 Im
终点: =
曲线收敛于原点, 且曲线与坐标轴相 切。
Re 0
1型系统
0+
8
5-4 系统开环频率特性的绘制
自动控制原理
2)与负实轴的交点
G ( j ) A( )e j R( ) jI ( )
K ( T )
0
Re
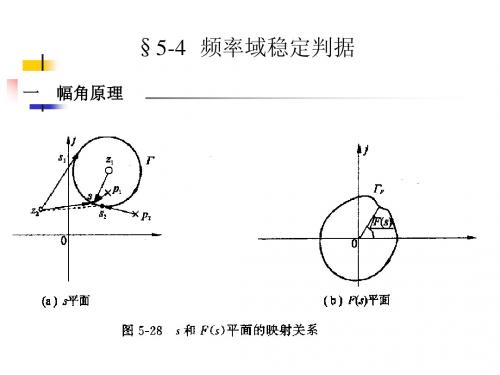
图 5.28 幅相曲线图
该系统为非最小相位系统
17
5-4 系统开环频率特性的绘制
自动控制原理
例题:绘制
G(s)
5(s 2)(s 3) s2 (s 1)
的幅相曲线。
解: () arctan arctan 180 arctan
2
3
A() 5 2 22 2 32 2 1
幅相曲线与实轴交点:
I() 0
x
曲线与负实轴交点:
() 180
x
R(x ) A(x )
9
5-4 系统开环频率特性的绘制