电流型控制技术
PWM整流技术综述

图2.三电平PWM整流器电路
三、电压型PWM整流器控制技术
电压型整流器VSR工作时,能够在稳定直流侧电压的同时,实现交流侧在受控功率因素(单位功率因数)条件下的正弦波电流控制。另一方面,常规的VSR控制系统一般采用双闭环控制,即电压外环和电流内环控制。在VSR双闭环控制设计中,电流控制动态性能直接影响VSR电压外环控制性能。目前,VSR电流控制技术主要分为两大类,即间接电流控制和直接电流控制。间接电流控制主要以相幅控制PAC为代表,直接电流控制则以快速电流反馈控制为特征,如滞环电流控制、固定开关频率电流控制、空间矢量电流控制等。这类直接电流控制可以获得较高的品质的电流响应,但是控制结构与算法较间接电流控制复杂。
本文就三相电压型PWM整流器拓扑结构以与控制技术进行了分析和综述,并对整流器未来的发展和应用进行分析。
二、电压型PWM整流器的拓扑结构与原理
如图1所示是三相电压型PWM整流器主电路,它具有很快的响应和更好的输入电流波形,稳态工作时,输出直流电压不变,开关管按正弦规律脉宽调制,整流器交流侧的输出电压和逆变器相同,忽略整流器输出交流电压的谐波,变换器可以看作是可控正弦三相电压源,它和正弦的电网电压共同作用于输入电感,产生正弦电流波形,适当控制整流器输出电压的幅值和相位,就可以获得所需大小和相位的输入电流。
[5]伍小杰,罗锐华,乔术学报,2005(12).
SG3525电流控制型PWM解调调制器

SG3525电流控制型PWM解调调制器型号:SG3525AN封装:DIP-16主要应用:开关电源1.1 PWM控制芯片SG3525功能简介随着电能变换技术的发展,功率MOSFET在开关变换器中开始广泛使用,为此美国硅通用半导体公司(Silicon General)推出SG3525。
SG3525是用于驱动N沟道功率MOSFET。
其产品一推出就受到广泛好评。
SG3525系列PWM控制器分军品、工业品、民品三个等级。
下面我们对SG3525特点、引脚功能、电气参数、工作原理以及典型应用进行介绍。
SG3525是电流控制型PWM控制器,所谓电流控制型脉宽调制器是按照接反馈电流来调节脉宽的。
在脉宽比较器的输入端直接用流过输出电感线圈的信号与误差放大器输出信号进行比较,从而调节占空比使输出的电感峰值电流跟随误差电压变化而变化。
由于结构上有电压环和电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型控制器。
1.1.1 SG3525引脚功能及特点简介其原理图如图:1.Inv.input(引脚1):误差放大器反向输入端。
在闭环系统中,该引脚接反馈信号。
在开环系统中,该端与补偿信号输入端(引脚9)相连,可构成跟随器。
2.Noninv.input(引脚2):误差放大器同向输入端。
在闭环系统和开环系统中,该端接给定信号。
根据需要,在该端与补偿信号输入端(引脚9)之间接入不同类型的反馈网络,可以构成比例、比例积分和积分等类型的调节器。
3.Sync(引脚3):振荡器外接同步信号输入端。
该端接外部同步脉冲信号可实现与外电路同步。
4.OSC.Output(引脚4):振荡器输出端。
5.CT(引脚5):振荡器定时电容接入端。
6.RT(引脚6):振荡器定时电阻接入端。
7.Discharge(引脚7):振荡器放电端。
该端与引脚5之间外接一只放电电阻,构成放电回路。
8.Soft-Start(引脚8):软启动电容接入端。
阐述三相电流型逆变器的PWM控制方法
阐述三相电流型逆变器的PWM控制方法前言:就当前的现状来看,关于三相电流型逆变器PWM控制方法的文献研究甚少,因而基于此,为了提升PWM变频电路整体运行效率,要求当代专家学者应注重深化对此项课题的研究,并全面掌控到PWM变频电路运行特点,且将PWM控制技术应用于电力系统中,形成稳定的运行目标。
以下就是对三相电流逆变器PWM控制方法的详细阐述,望其能为当代电力行业系统控制模式的进一步创新与发展提供有利的文字参考。
一、PWM变频电路运行特点分析就当前的现状来看,PWM变频电路运行特点主要体现在以下几个方面:第一,从电压型PWM交-直-交变频角度来看,其电路特点主要体现在输出电压呈现出与正弦波形较为接近的特点,因而在此基础上,相关技术人员在对变频电路进行操控的过程中必须强化与其运行特点的有效结合。
另外,强调对二极管的应用也是PWM变频电路呈现出的主要特点之一;第二,基于电流型PWM交-直-交变频特点研究中可以看出,其在运行过程中逐渐呈现出高阻抗的运行特性,同时也由此形成了矩形波样式的运行模式,因而为实现对PWM控制技术的应用,必须注重结合其电路特点。
二、PWM控制技术发展现状变压变频设备的应用在一定程度上缓解了传统电力系统运行过程中凸显出的问题,因而其应用现状逐渐引起了人们的关注,但是就当前的现状来看,其在应用的过程中仍然存在着某些不足之处,即未实现变頻装置的合理化设置,继而对其的推广行为受到了一定的阻碍。
随着现代化科学技术的不断发展,变频装置在应用的过程中得到了逐步完善,且逐渐将现代化通信技术应用于装置运行中,带动了装置整体运行水平的提升。
此外,随着变频装置的不断完善,PWM技术开始被广泛应用于电气公司实际生产中,且以正弦波脉宽调制方式、磁通SPWM 等途径提升了电压的整体利用效率,并就此减少了电路功效的损害。
同时在使用的过程中也逐渐凸显出噪声较小等优势,因而在此背景下,相关技术人员在系统操控过程中应强化对PWM控制技术的应用。
pfc工作原理

pfc工作原理
PFC(功率因素校正)是一种电力电子技术,旨在提高交流电
源的功率因素,也即提高电气设备的能量利用率。
PFC的工作原理基于改善交流电源的电流波形,使其接近理想的正弦波形,并与电压保持同步。
PFC通常使用的方法是采用整流器将交流电源转换成直流电压,并通过电容器储存电能。
然后,在直流电源输出之前,使用一个控制电路来监测电流和电压波形,并相应地控制开关管的导通和截止。
通过调整导通角和截止角,使电流波形与电压波形同步,并尽可能与理想的正弦波一致。
主要的PFC控制技术有三种:电压型控制、电流型控制和混
合型控制。
电压型控制根据电压波形的变化来控制电流,适用于电源稳定的情况。
电流型控制则根据电流波形的变化来控制电流,适用于大功率负载。
混合型控制结合了电压型和电流型控制的优点,以适应不同的负载变化。
通过PFC技术,可以显著提高交流电源的功率因素,减少传
输过程中的功率损耗,提高电力系统的能量利用率。
同时,PFC还能减少电网的谐波污染和电磁干扰,提高电气设备的工作稳定性和可靠性。
因此,PFC技术在各种电力电子产品和系统中得到广泛应用。
电流型PWM 控制器在24V电源中的应用
电流型PWM 控制器在24V电源中的应用
1 双环电流型PWM控制器工作原理
双环24V电源电流型脉宽调制( PWM) 控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。
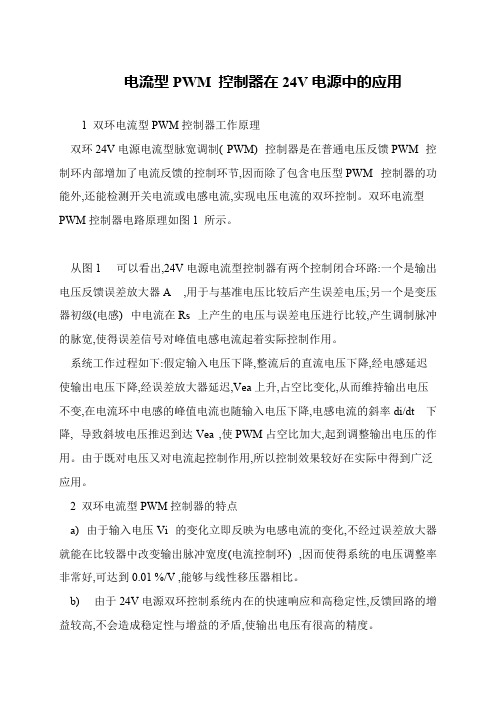
双环电流型PWM控制器电路原理如图1 所示。
从图1 可以看出,24V电源电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A ,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感) 中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟,Vea上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降, 导致斜坡电压推迟到达Vea ,使PWM占空比加大,起到调整输出电压的作用。
由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
2 双环电流型PWM控制器的特点
a) 由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环) ,因而使得系统的电压调整率非常好,可达到0.01 %/V ,能够与线性移压器相比。
b) 由于24V电源双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
船用电流控制型的Buck-boost变换器的设计

第34卷第4期2020年7月兰州文理学院学报(自然科学版)J o u r n a l o fL a n z h o uU n i v e r s i t y ofA r t s a n dS c i e n c e (N a t u r a l S c i e n c e s )V o l .34N o .4J u l .2020收稿日期:2020G03G10作者简介:梁锋林(1977G),男,福建莆田人,讲师,研究方向:电气与电子教学.E Gm a i l :l f l o k 153@126.c o m.㊀㊀文章编号:2095G6991(2020)04G0044G09船用电流控制型的B u c k Gb o o s t变换器的设计梁锋林(湄洲湾职业技术学院自动化工程系,福建莆田351119)摘要:研究了船用电流控制型的B u c k Gb o o s t 变换器的设计,目的是通过设计的变换器实现输出电压可调,并且输出的电压要趋于稳定.通过分析B u c k Gb o o s t 电路以及主要工作原件的波形图,得出输出电压U 0和占空比α的关系,根据电路中的关系,计算出电感L 和电容C 的最小值.然后在原电路基础上设计出了一个电流型控制的B u c k Gb o o s t 电路,这个电路负载输出电压的反馈与设定的基准电压形成电压环,电压环输出的结果与电感电流的反馈形成电流环的双环控制.通过改变基准电压的大小从而改变输出电压的大小.最后利用P S I M 软件分别对B u c k Gb o o s t 电路以及电流型控制的B u c k Gb o o s t 电路行仿真.关键词:B u c k Gb o o s t 变换器;电流控制;P S I M 仿真中图分类号:U 665㊀㊀㊀文献标志码:A0㊀引言随着电力电子技术的快速发展,人们对电子设备的使用已经遍布生活的各个方面.在电子设备中安装变换器用于将输入信号转换为所需信号.变换器的种类很多,包括A C /D C 变换器㊁D C /D C 变换器和A C /A C 变换器等.在众多变换器中,D C /D C 变换器因体积小㊁质量轻等优势,成为电子设备中首选的变换器之一.目前船舶所用的能源主要为电能,由于船舶在航行时处于水含量和盐含量都很大的空气中,且航行过程中船舶自身比较晃动,这些因素对电力设备具有很大影响,因此船舶对电力系统有严格的要求.在船舶电力系统所用的变换器中D C/D C 变换器的使用最为普遍,其中电流型控制的B u c k Gb o o s t 变换器十分重要,因为它的输出电压可调,并且可以稳定输出,这对船舶中的电力系统来说是必不可少的因素.本文所研究的主要内容是怎样控制B u c k Gb o o s t 电路实现升降压,以及电流型控制部分的设计.电路升降压的实现通过控制开关管的占空比大小来实现,本实验的重点在于电流型控制的B u c k Gb o o s t 电路的控制电路设计.电流型控制是双环控制,采用输出电压的反馈设计一个电压环,通过电感电流的反馈设计一个电流环,最后可以输出一个脉冲宽度可调的输出信号来控制开关管,从而实现电流型控制及输出电压可调并且可以稳定输出[1G3].1㊀Buck Gboost 变换器升降压斩波(B u c k Gb o o s t)电路的电路图如图1所示.开关管V T ㊁二极管D ㊁电容C ㊁电感L 以及负载电阻R 组成了升降压斩波电路[4G5].可以通过开关管V T 的通断决定电路的运行状态.图1㊀B u c k Gb o o s t 变换器的主电路B u c k Gb o o s t 电路中电感L ㊁二极管D ㊁信号电压U G E ㊁开关管V T 的波形图如图2所示.图2㊀电感L 的电流波形其中t o n表示开关管V T导通时,电感L的充电时长;t o f f表示开关管V T关断时,电感L的放电时长.在图2中,开关管V T在t o n时间内是导通状态,电感L受电源电压E的作用不断充电,电流逐渐上升.在t o f f时间内开关管V T关断,电感L 放电电流逐渐减小.如此往复,电感L的电流重复这个过程.电感L的电压波形如图3所示,在t o n时间内开关管V T导通,此时在电路中电源电压E只作用于电感L上,所以电感L在充电时,电压大小为E.电感L在t o f f时间内开关管V T关断,电感L作用于负载电阻和二级管上,此时电感L充当电压源的作用.所以放电时,电感L的电压为负载输出电压,大小为U0.由于电感L充放电时的极性不同,所以在开关管V T开通时电感L的电压与关断时电感L的电压方向是相反的,U0为负值.图3㊀电感L的电压波形二极管D的电流波形如图4所示.当二级管D在t o n时,电感L右边的电路不导通,此时二极管D中没有电流流通,所以在t o n时,二极管D没有波形.当二极管D在t o f f时,电感L右边电路导通,由于电感L放电,二极管D中有电流流通,随着电感L在放电时电流逐渐减小,二极管D的电流也逐渐减小.所以在t o f f时间内,电感L的波形与二极管D的波形是相同的.图4㊀二极管D的电流波形信号电压波形如图5所示.在t o n时间段内,信号电压输出高电压信号,控制开关管V T开通.在t o f f时间段内,信号电压输出一个低电压信号,控制开关管V T关断.图5㊀信号电压的波形开关管V T的电流波形如图6所示.在t o n时间段内,开关管V T导通,此时开关管㊁电感㊁电源形成回路,开关管V T的电流变化和电感L的电流变化是相同的,逐渐上升.在t o f f时间段内,由于开关管V T的关断,电路中没有电流流通,所以在t o f f时间内,开关管V T的电流为0,此时没有波形.图6㊀开关管V T的电流波形1.1㊀电感L和电容C的最小值当有触发脉冲信号流过开关管V T时,电感L及其左边电路触发导通,右边电路由于二极管的作用而不通,此时电源电压E只作用于电感L,通过电流流向可以判断电感L的极性为上正下负,由于电感L的特性,可以将电源输出的电压E 转化为电感L的磁能储存起来[6].此时对于电感L有:u L=Ld i Ld t=E.(1)当经过t o n时间后,触发脉冲信号截止时,由于没有信号流过开关管V T,此时电感L左边电路截止,右边电路由于电感L的作用,形成以电感L为电源的回路,此时电感L开始向负载右边回路放电,电容C受到电感L的放电影响开始进行充电,通过分析电流的流向可以知道电感L充电时的极性(上正下负)与它放电时的极性(下正上负)是相反的,因此负载输出电压与电源电压的方向也是相反的.此时对电感L有:54第4期梁锋林:船用电流控制型的B u c kGb o o s t变换器的设计i L =1Lʏu L d t +i L (0)=-U 0Lt +i L (t o n ).(2)当I m i n =0时,一个周期内的平均电流为:I L =0.5I m a x =U 02L(T -t o n ),(3)对负载电阻由电荷守恒定律有:Q =I 0T =U 0R LT =I L (T -t o n ),(4)由式(3)和式(4)可以得出:L m i n =R L (T -t o n )22T.(5)电容C 的主要功能是当电感L 在充电时为负载提供电源,使负载可以持续输出,并且可以滤去谐波减小纹波电压.当0<t <t o n 时i C =C d u Cd t,t o n <t <T 时i C =i L -I 0=I m a x -U 0L(T -t o n )-I 0.(6)另一方面,纹波电压的大小等于在t o n <t <T 内i c 对时间t 的积分,所以可以计算出纹波电压的峰峰值为:ΔU =1Ci C (T -t o n )=αU 02L C(T -t o n )2.(7)再结合上述电感的公式,可得电容C 的最小值C m i n 为:C m i n =αU 0TR L ΔU.(8)1.2㊀输出电压U 0与占空比α的关系假设电路中所有元件均为理想元件.电路正常运行时,电感L 处于稳定状态,开关管V T 导通时间与导通时电感L 电压的乘积和开关管V T 关断时间与关断时电感L 电压的乘积大小相同.因此对电感L 的电压在一个周期T 内进行积分运算后结果也为0,即ʏT 0U Ldt =0.(9)当V T 处于通态期间时,u L =E ;当V T 处于断态期间时,u L =-u 0.导通时的电压与时间的乘积与关断时的电压与时间的乘积大小是相等的,则有ʏT 0UL=E t o n -U 0 t o f f =0.(10)所以输出电压为:U 0=t o n t o f f E =t o n1-t o f fE =α1-αE ,(11)式(11)中α即为占空比.从上式可以看出,输出电压与占空比α是呈正比的.α越大输出电压也就越大,α越小输出电压就越小.因此通过改变α的值可以得到输出电压比电源高的电压,也可以得输出电压比电源低的电压.具体可分为以下3种情况.(1)当充电时间(t o n )<放电时间(t o f f )时,α<05,电路为降压电路;(2)当充电时间(t o n )=放电时间(t o f f )时,α=0 5,输出电压等于输入电压;(3)当充电时间(t o n )>放电时间(t o f f )时,α>05,电路为升压电路.设电源平均电流为I 1,负载平均电流为I 2,当电路中电流脉冲非常小时,可以得出I 1I 2=t o nt o f f,(12)由上式可得I 2=t o f ft o nI 1=1-ααI 1.(13)2㊀Buck Gboost 变换器的设计2.1㊀控制电路在设计的电流型控制B u c k Gb o o s t 电路中,要利用负载输出的电压U 0作为反馈,与设定的基准电压先进行比较,比较结果输入P I 调节器进行调节,这部分组成形成电压环[7];电压环的输出再与电感L 输出的电流信号进行比较,比较的结果输入P I 调节器进行调节,这部分组成形成电流环.电流环的输出与设定的三角波信号通过比较器进行比较,得到对应占空比α的P WM 波,控制开关管V T .在本次控制电路中,采用的主要元器件有:电压传感器㊁阶跃电压源㊁减法运算模块㊁P I 调节器㊁限幅器㊁电流传感器㊁三角波电压源㊁比较器和电压探头.在电路的控制方式选择中,采用电流型控制的原因是电流型控制相比电压型控制加入了电感64㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第34卷电流,因此它的反应速度更快.2.2㊀电流控制型的BuckGboost电路设计电流型B u c kGb o o s t变换器如图7所示,该电路主要包括主电路和控制电路两部分.其中控制电路部分主要包括电压环㊁电流环和P WM产生3部分.图7㊀电流型控制B u c kGb o o s t变换器㊀㊀电路的工作原理:首先设定一个基准电压,假如电路的输出电压比基准电压大,经过减法运算后输出到P I调节器,P I调节器的输出会减小;P I 调节器的输出将作为电流环的给定输入,与电感电流的反馈进行减法运算,输入P I调节器后,电流环的输出也会减小.电流环的输出信号与锯齿波信号进行比较,得到占空比α变小的脉冲信号,从而使开关管V T的导通时间减少,降低输出电压U0,使其等于设定的基准电压.反之若电路的输出电压小于设定的基准电压,则电压环的输出增大,电流环的输出也增大,使比较器输出的脉冲信号的占空比α变大,从而使开关管V T的导通时间增长,升高输出电压,使其等于设定电压[8G9].通过调节基准电压的大小,来控制输出电压的大小.升高或者降低基准电压都会引起电压环和电流环输出的减小或增大,电流环的输出又和锯齿波信号进行比较,产生与之对应的占空比α的P WM波,从而控制开关管V T的导通时间.开关管V T的接通时间越长,占空比α也就越大,由公式U0=α1-αE可得其输出电压U0也就越大.反之若开关管V T接通时间越短,占空比α也就越小,输出电压也越小.3㊀仿真实验3.1㊀BuckGboost变换器仿真分析用P S I M进行B u c kGb o o s t升降压斩波电路的仿真.选取电压源电压E=48V㊁电感L=500u H㊁电容C=470u F㊁仿真时间设定为0.1s.通过输出端的电压探头来检测输出电压.通过比较输出电压与输入电压的大小来判断电路是升压还是降压,这个过程可以通过仿真后的波形图看出.占空比α是通过调节方波电压源进行的.双击方波电压源,会弹出一个选项,通过手动输入所需要的占空比α,来控制开关管接通时间[10G11].在本次实验中,占空比α选用3种:α=0.2;α=0.8;α=0.5.通过观察在3种不同占空比情况下,输出电压和电流的波形图,判断理论结果与仿真结果是否相同.电路仿真如图8所示.图8㊀B u c kGb o o s t变换器仿真图74第4期梁锋林:船用电流控制型的B u c kGb o o s t变换器的设计㊀㊀图9~图11为电压与电流波形图.(1)当占空比α=0.2时,仿真的输出电压㊁电流如图9所示.当占空比α=0.2<0.5时,负载输出的电压(a)电压波形(b)电流波形图9㊀占空比为0.2时输出电压和电流波形可以计算得出负载电压值为:U0=t o nT-t o n E=α1-αE=0.21-0.2ˑ48V=12V,负载输出电流为:I0=U0R=12100A=0.12A,通过波形图可以发现测出的电压与理论计算出的电压值相同.由于输入电压为48V,输出电压为12V,输出电压比输入电压小,所以为降压.因为电感L 充电与放电时极性相反,所以负载输出时实际输出为负值.实际负载电压为-12V,负载电流为-0.12A.理论结果与仿真结果一致.(2)当占空比为α=0.8时,仿真输出电压㊁电流如图10所示.当占空比α=0 8>0.5时,负载输出的电压为:U0=t o nT-t o n E=α1-αE=0.81-0.8ˑ48V=192V,由负载输出的电流为:I0=U0R=192100A=1.92A,通过波形图可以发现测出的电压与理论计算出的电压值相同.由于输入电压为48V,输出电压为192V,输出大于输入,所以为升压.因为电感L在充电与放电时极性是相反的,所以实际输出的电压和电流为负值.即负载电压为-192V,负载电流为-1.92A.理论结果与仿真结果一致.(3)当占空比α=0.5时,仿真的输出电压㊁电流如图11所示.由图11可以看出,当占空比α=0.5时,负载的输出电压为:U0=t o nT-t o n E=α1-αE=0.51-0.5ˑ48V=48V,负载的输出电流为:I0=U0R=48100A=0.48A,通过波形图可以发现测出的电压与理论计算出的电压值相同.由于输入电压为48V,输出电压也为48V,所以输入电压等于负载输出电压.因为电感L充电和放电时的极性是相反的,所以实际的输出电压和电流应该为负值.即负载电压为-48V,负载电流为-0.48A.理论结果与仿真结果一致.84㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第34卷(a)输出电压波形(b)输出电流波形图10㊀占空比为0.8时输出电压和电流波形(a)输出电压波形(b)输出电流波形图11㊀当占空比为0.5时输出电压和电流波形㊀㊀通过对B u c k Gb o o s t 电路的仿真实验,可以看出,在不断改变占空比α时,负载的输出电压也在不断变化.以α=0.5为分界线,当α>0.5时,负载输出电压将大于电源电压,实现升压;当α<0 5时,负载输出电压将小于电源电压,实现降压;α=0.5时负载输出电压等于输入电压.通过观察波形图发现负载输出电压的大小也满足公式:U 0=α1-α.实验结果与理论结果相同.通过上述实验结果可以得出结论:占空比α不能等于1,否则开关管将一直导通,负载没有电压输出;占空比α也不能等于0,若α=0,负载也没有电压输出.因此占空比α在(0,1)内取值.当占空比α>0.5时,为升压电路,占空比α越大,则负载输出电压也就越大,并且输出电压的大小满足U 0=α1-α;当占空比α<0.5时,为降压电路,占空比α越小,则负载输出电压也就越小,输出电94第4期梁锋林:船用电流控制型的B u c k Gb o o s t 变换器的设计压大小也满足U0=α1-α.在图9~图11中,电压的单位为V,电流的单位为A.3.2㊀电流型控制的BuckGboost变换器仿真分析如图12所示.参数设置为:电压源E=48V,电感L=500u H,电容C=470u F,负载电阻R=100Ω,设定仿真时间为0.06s.在P I调节器中双击以后有两个值需要设定,其中G a i n表示增益,也就是比例增益,G a i n的值越大P I调节器的比例作用就越强,如果它的值太大,系统会产生震荡,不稳定.另一个需要设定的值为T i m eC o nGs t a n t,也就是时间常量,即积分作用的时间,它的值越小积分作用就会越强,但是如果过小系统会不稳定[12].经过调试,取电压环中P I调节器的参数设定为:增益=5,积分时间=0.001.电流环中P I调节器的参数设定为:增益=0.2,积分时间=0 005.实验的方法是通过改变设定的基准电压大小图12㊀电流控制型B u c kGb o o s t变换器仿真图来进行仿真,通过仿真后的波形图来判断是否可以通过改变基准电压的大小来改变输出电压的大小,使其等于设定的基准电压,并且可以稳定输出.在这里,设定的两组基准电压一组大于电源电压,另一组小于电源电压,分别为100V和30V.图13~图14为不同基准电压下的输出电压波形图.当设定基准电压大小为100V时,输出电压U0的仿真波形图如图13所示.当设定基准电压大小为30V时,输出电压U0的仿真波形图如图14所示.从图13和图14中,可以看出当设定的基准电压=100V时,负载输出电压U0会逐渐上升到100V并且稳定输出,此时输出电压大于输入电压,实现了升压;当设定基准电压=30V时,负载输出电压U0会逐渐上升到30V并且稳定输出,此时输出电压小于输入电压,实现了降压.在设计的电流型B u c kGb o o s t变换器中,可以通过改变基准电压的大小来改变负载输出电压U0的大小,使其等于设定的基准电压,实现了升降压且可以稳定输出[13].仿真结果与目标结果相同.图13㊀基准电压为100V时输出电压V0的仿真波形05㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第34卷图14㊀基准电压为30V时输出电压U0的仿真波形㊀㊀在图13~图14中,电压的单位为V,电流的单位为A.4㊀结束语通过对电流型控制的B u c kGb o o s t变换器仿真,发现通过调节基准电压的大小可以实现输出电压U0等于所设定的基准电压大小.所以当调节基准电压大于输入电压时,输出电压等于基准电压,实现了升压;当调节基准电压小于输入电压时,输出电压等于基准电压,实现了降压,并且可以稳定输出,这个结果与预期结果是相同的.在本此实验中也存在一些问题,在控制电路部分,通过不断调试P I调节器中的参数最后确定的稳定波形,因此P I调节器中增益的设定以及积分时间的设定都不够准确.虽然最后输出的波形是稳定的,但是得到的输出电压与设定的电压还是存在着一些误差.今后的主要研究内容是要加强对P I调节器参数的设定.参考文献:[1]王兆安,刘进军.电力电子技术[M].北京:机械工业出版社,2007.[2]夏德钤,翁贻方.自动控制理论[M].北京:机械工业出版社,2012.[3]刘树林.输出木质安全型B u c kGB o o s tD CGD C变换器的分析与设计[J].中国电机工程学报,2008,28(3):60G65.[4]李钦林.D CGD C(B u c kGB o o s t)变换器设计与仿真分析[J].机电技术,2017(3):64G66.[5]刘树林.B u c kGB o o s t变换器的能量传输模式及输出纹波电压分析[J].电子学报,2007,20(5):838G843.[6]许亦冉.基于P S I M软件的B u c kGB o o s t变换器的设计与仿真[J].信息记录材料,2018,19(1):70G73.[7]王靓华,岳继光,苏永清,等.平均值电流控制型B u c k 变换器控制系统的设计[J].电源技术,2013,137(12)2225G2228.[8]王海华,宋蕾.基于微控制器的直流斩波器的设计[J].华北科技学院学报,2008,5(1):76G81.[9]贾美美,张国山.电流控制型B u c kGB o o s t变换器的混沌控制[J].控制工程,2017,24(12):2405G2411.[10]王荣杰.船用电流控制B u c kGb o o s t变换器分岔行为分析[J].船舶工程,2016,38(5):69G73.[11]成楠.升压式D C/D C变换器的研究与设计[D].西安:西安电子科技大学,2010.[12]严旭海.一种双向D C/D C变换器的设计与研究[D].南京:南京林业大学,2012.[13]沈琪,汪鑫,罗雪姣.一种稳定高效的B u c kGB o o s t开关电源的研究[J].科技视界,2018(27):59G60.[14]S AMA V A T I A N V,R A D A N A.An o v e l l o wGr i p p l e i n t e r l e a v e db u c kGb o o s t c o n v e r t e rw i t hh i g h e f f i c i e n c y a n d l o wo s c i l l a t i o nf o r f u e lGc e l l a p p l i c a t i o n s[J].I nGt e r n a t i o n a lJ o u r n a lo f E l e c t r i c a lP o w e r&E n e r g y S y s t e m s,2014,63:446G454.[15]S AMA V A T I A N V,R A D A N A.A h i g he f f i c i e n c y i n p u t/o u t p u tm a g n e t i c a l l y c o u p l e d i n t e r l e a v e db u c kGb o o s tc o n v e r t e rw i t h l o w i n t e r n a l o s c i l l a t i o n f o r f u e lGc e l l a p p l i c a t i o n s:C C Ms t e ad yGs t a te a n a l y s i s[J].I nGd u s t r i a l E le c t r o n i c s I E E ET r a n s a c t i o n s o n,2015,62(9):5560G5568.[责任编辑:李岚] (下转第61页)15第4期梁锋林:船用电流控制型的B u c kGb o o s t变换器的设计m a t i o n f u s i o n i nw i r e l e s s s e n s o r n e t w o r k ,a n d t h e o p t i m i z a t i o n j u d gm e n t o f n e t w o r k i n f o r m a t i o n s e c u Gr i t y r i s k i s c a r r i e do u t c o m b i n i n g w i t h f u z z y d e c i s i o nm e t h o d t oa c h i e v en e t w o r k i n f o r m a t i o ns e c u r i t yr i s ka s s e s s m e n t a n do p t i m i z a t i o nd e c i s i o n Gm a k i n g a n d t o i m p r o v e t h e s t a b i l i t y a n d a d a p t a b i l i t y of n e t Gw o r k i n f o r m a t i o n s e c u r i t y r i s k p r e d i c t i o n .T h e s i m u l a t i o nr e s u l t s s h o wt h a t t h e a c c u r a c y ofn e t w o r k i n f o r m a t i o ns e c u r i t y r i s k p r e d i c t i o n i s h i g h e r ,t h e c o n v e r g e n c e o f t h e p r e d i c t i o n p r o c e s s i s b e t t e r ,a n d t h en e t w o r k i n f o r m a t i o n s e c u r i t y i s i m pr o v e d .K e y wo r d s :i n f o r m a t i o nm i n i n g t e c h n o l o g y ;n e t w o r k i n f o r m a t i o n ;s e c u r i t y r i s k ;p r e d i c t i o n ;c h a r a c t e r i s Gt i c q u a n t i t y(上接第51页)D e s i gno fB u c k Gb o o s tC o n v e r t e r f o rM a r i n eC u r r e n tC o n t r o l L I A N GF e n gGl i n (M e i z h o u w a nV o c a t i o n a lT e c h n o l o g y C o l l e g eD e p a r t m e n t o fA u t o m a t i o nE n g i n e e r i n g,P u t i a n351119,F u ji a n ,C h i n a )A b s t r a c t :I nt h i s p a p e r ,t h ed e s i gno fB u c k Gb o o s tc o n v e r t e r f o r m a r i n ec u r r e n tc o n t r o la r es t u d i e d ,w h i c ha i m s t or e a l i z e t h ea d j u s t a b l eo u t p u tv o l t a g e t h r o u g ht h ed e s i g n e dc o n v e r t e r ,a n dt h eo u t pu t v o l t a g e s h o u l db e s t a b l e .B y a n a l y z i n g t h eb u c k Gb o o s t c i r c u i t a n d t h ew a v e f o r m s o f t h em a i nw o r k i n g c o m p o n e n t s ,t h e r e l a t i o n s h i p b e t w e e no u t p u t v o l t a g eU 0a n dd u t y c y c l e αa r e o b t a i n e d ,a n d t h em i n i Gm u mv a l u e s o f i n d u c t a n c eLa n d c a p a c i t a n c eCa c c o r d i n g t o t h e r e l a t i o n s h i pi n t h e c i r c u i t a r e c a l c u l a t Ge d .T h e no nt h eb a s i so f t h eo r i g i n a l c i r c u i t ,ac u r r e n t Gc o n t r o l l e db u c k Gb o o s t c i r c u i t i sd e s i g n e d .A v o l t a g e l o o p i s f o r m e db y t h e f e e d b a c ko f t h e l o a do u t p u t v o l t a geo f t h i s c i r c u i t a n d t h e s e t r e f e r e n c e v o l t a g e ,a n d ad o u b l e Gl o o p c o n t r o l o f t h ec u r r e n t l o o p i s f o r m e db y t h eo u t p u t r e s u l to f t h ev o l t a ge l o o p a n d t h ef e e d b a c ko f t h e i n d u c t i v e c u r r e n t .T h e o u t p u t v o l t ag e i s ch a n g e db y c h a n gi n g th e s i z e o f t h e r e f e r e n c e v o l t a g e .F i n a l l y ,P S I M s o f t w a r e i su s e dt os i m u l a t eb u c k Gb o o s t c i r c u i t a n db u c k Gb o o s t c i r c u i t r e s p e c t i v e l y.K e y wo r d s :B u c k Gb o o s t c o n v e r t e r ;c u r r e n t c o n t r o l ;P S I Ms i m u l a t i o n 16第4期王颖等:基于信息挖掘技术的网络信息安全风险预测。
PWM整流器直接电流控制、技术

2 WM整流器拓扑结构 图 P
电压型P WM整流器 的拓扑结构如 图1 所示 , 它主要 由三部
分组成 : 交流 回路、功率开关桥路、直流 回路 。 中交流 回路包 其
・ 金项 目 河 南省 自然科学基金项 目 ( l 0 0 基 : 0 1 5 0 ) 4 0 6
收 稿 日期 : 0 - 8 2 2 6 0 - 0 2
无差拍控制、 滑模变结构控制、 状态控制的原理是实时比较实 际电流和指令电流瞬时
维普资讯
,
誓 ≯
蘸曩
电气 传 动
E e ti a ie l c r IDr s c v
《 自动 化技术与应用 》2 0 一 l6卷第 0 7年第 2 一 2期
摘
要: 总结了 P WM 整流器直接 电流控制的几种控 制策略,分析 了其工作原理和优缺点 ,展望了直接 电流控制技术的发展趋势。
. 文章编号 :0 3 2 1 0 70 — 0 3 0 10 —74 ( 0 )2 0 7 — 3 2
关键词 : WM 整流器 ;直接 电流控制 P 中图分类号 : N3 T 5 文献标识码 : B
值 的大小 , 指令电流值是实际电流的上 限, 实际电流一旦达到这个 上 限, 立刻转而向下衰减 , 电感值的大小 , 线路 的阻抗和脉宽调制 的开 关频率 影响了这一衰 减的最 终值 。 其控 制原理 框图如 下。
图2 峰值 电流控制原理框图 峰值 电流的优点 : ①暂态闭环 响应 较快 , 输入 电压 的变化 对
和输出负载的变化的瞬态响应蚜 陕; ②控制环易于设计 ; ③输入 电 压 的调整可与 电压模式控制的输入电压前馈技术相妣美 ; ④简单 自 动的磁通平衡功能; ⑤瞬时峰值电流限流功能 , 即内在固有 的逐
LCL滤波并网逆变器的电流控制技术研究综述
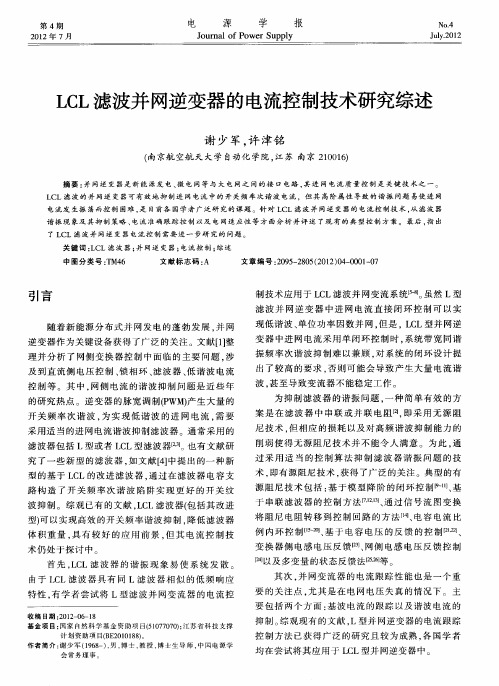
L L滤 波 的并 网逆 变器 可 有 效地 抑 制 进 网 电流 中的 开 关 频 率 次谐 波 电 流 .但 其 高 阶属 性 导 致 的 谐 振 问题 易使 进 网 C 电流 发 生 振 荡 而控 制 困难 , 目前 各 国 学者 广 泛 研 究 的课 题 。针 对 L L 滤 波并 网逆 变器 的 电 流控 制 技 术 , 滤 波 器 是 C 从
报
总第 4 2期
此外 , 多文 献研 究 表 明 , 强 电 网条件 下 , 众 在 现
有 的 电流控 制技术 可实 现 比较 令人 满 意的效果 。但 是 并 网系统 实 际 工 作 中 , 方 面 , 一 由于 大 量 的新 能 源 分 布 式 发 电 的接 入 、 长 的 传输 线 路 、 压 器 等 较 变 的影 响 , 从公 共耦 合点 ( C 看 去 , 际的 电网呈 现 P C) 实 感性 , 且通 常 呈 现 较 大 的 感抗 , 电流 控 制 提 出较 对 大 的挑 战 : 一 方 面 , 网故 障情 况 下 的低 电 网电 另 电
加0
流( i) L 以及进 网电流 ( 的闭环 控制 , 中基 于 。 其 的
电流控制 从 根本上 来说是 间接 控制进 网电流 。逆变
器 输 出电压 至 电流 的幅频 特 性 如 图 1b所 示 , 者 () 二
在 谐 振 频 率c , , 1 处 存 在 谐 振 峰 , 及 并 网 式() ) 危
第 4期
2 2年 7月 01
电
源
学
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
? 电流型控制技术是一种性能优良的控制技术。美 国BOSE公司Thomas A .Froeschle 于1967年 首次提出了电流控制两态调制技术(滞环电流型控 制技术),但当时并未公诸于世。
? 直到1984年申请并获得了美国发明专利后才得到 了很大发展和广泛应用。
? 电流型控制技术包括瞬时值电流型控制技术和平 均值电流型控制技术。
1
瞬时值电流型控制技术
? 瞬时值电流型控制技术包括恒定截止时间、恒 定导通时间、恒定开通时刻、恒定关断时刻和 恒定迟滞环宽等五种。
? 这类电流型控制技术是检测并将电感电流或功 率开关电流作为电流内环的反馈信号与电压外 环的输出信号(电流给定)经比较器比较后,去 控制功率开关的占空比,使功率开关的峰值或 谷值电流直接跟随电压反馈回路中误差放大器 输出信号的变化的。
平时间或恒频时钟脉冲的到来时刻决定的,而是由迟滞比较器设置的恒
定迟滞环宽(h 1-h 2)决定的。
? 这种电流型控制技术设置 ,也称为电流控制两态调制技术。
7
1.两态调制技术
? 两态调制就是调制电路的输出只有高电平和低电 平两个状态,两态调制系统是将调制电路本身的 输出脉冲经由反馈网络产生的谐波函数作为载波。 基本的两态调制系统如图所示。
2
6.5.1恒定截止时间峰值电流控制技术
? 恒定截止时间峰值电流控制原理如图所示
电感电流的反馈信号iLf与电压误差放大器输出的电流给定信号
ir(ue)比较,当iLf上升到ir时,功率开关就关断, iLf下降。功率 开关的截止时间,并不是由电感电流的下降量 ΔiLf决定的,而 是由单稳态触发器设置的恒定低电平时间决定的。
? 如果采用反馈网络不是固定电阻的迟滞比较器,即采用 一恒定频率的时钟信号及鉴相电路来控制迟滞比较器的 反馈量大小,改变其滞环宽度,从而保持开关频率恒定
10
2.电流控制两态调制系统
11
6.5.6峰/谷值电流型控制技术的特点 1.优点
? (1)电流内环是一个高度稳定的自激振荡系统,对整个系统来说, 具有高度的稳定性;
在每个开关周期内,功率开关的导通时间恒定,截止时间和开关周期 (开关
频率通时刻峰值 电流控制技术
? 恒定开通时刻峰值电流控制原理如图所示。
? 当恒频时钟信号到来时, RS触发器置
? 位,功率开关开通,电感电流或功率开关 电流iLf 开始上升;
? 当iLf及其电流补偿信号ic之和上升到电压 误差放大器输出的电流给定信号 ir时,RS 触发器复位,功率开关就关断, fLf 开始下 降。
? 功率开关的开通时刻并不是由电感电流的 下降量△ iLf 决定的,而是由RS触发器的 恒定置位时刻,即恒频时钟信号的到来时 刻决定的。
? 在每个开关周期内,功率开关的导通时间 和截止时间均变化,而开关频率恒定。
5
6.5.4恒定关断时刻谷 值电流控制技术
? 恒定关断时刻谷值电流控制原理如图所示。 ? 当恒频时钟信号到来时, RS触发器复位,
6
6.5.5恒定迟滞环宽峰/谷值电流控制技术
? 电感电流或功率开关电流的反馈信号 iLf 与电压误差放大器输出的电流给 定信号ic经迟滞比较器比较,当误差电流 ie=ir-iLf <h2时,功率开关就关断, iLf 下降;当误差电流ie=ir-iLf >h1时,功率开关就开通。
? 功率开关的截止时间或开通时刻,不是由单稳态触发器设置的恒定低电
? (2)当输入电压或负载变化导致输出电压变化时,都将引起电感 电流变化率的改变,从而使占空比发生变化,起到了电压前馈 控制的作用,具有快速的动态响应;
? (3)由于系统具有高度的稳定性和快速的动态响应,反馈环路的 增益可以设计得很大,从而使输出电压具有很高的静态精度;
? (4)具有内在的对功率开关的电流控制及限流能力,过载及短路 能力强;
? (5)并联的各个逆变器共用一个电压误差放大器时,可自动均流; (6)强的参数鲁棒性和对各种电路的广泛适应性。
12
2.缺点
? (1)双环控制增加了电路分析和设计的难度; ? (2)占空比大于0.5时,由于电流上升率不够
大,在没有斜坡补偿时,控制环路变得不稳定, 抗干扰性能差,因此需要斜坡补偿; ? (3)由于控制信号来自输出电流,功率电路的 谐振会给控制环带来噪声,噪声免疫能力差; ? (4)存在较大的电感电流峰值/平均值误差; ? (5)因控制环控制电流,负载调整率变差,变 换器多路输出时需要耦合电感实现交叉调节。
功率开关关断,电感电流或功率开关电流 iLf 开始下降; ? 当iLf 及其电流补偿信号ic之和下降到电压误 差放大器输出的电流给定信号 ir时,RS触发 器置位,功率开关就开通, iLf 开始上升。 ? 功率开关的关断时刻并不是由电感电流的上 升量ΔiLf 决定的,而是由RS触发器的恒定 复位时刻,即恒频时钟信号的到来时刻决定 的。 ? 在每个开关周期内,功率开关的截止时间和 导通时间均变化,而开关频率恒定。
13
6.5.7平均值电流型控制技术
平均值电流型控制系统框图与原理波形如图示
? 将电感电流检测电阻R。上的电压作为电流内环的反馈信号 与电压外环的输出信号(电流给定)比较,经电流误差放大器 放大后,并在PWM比较器的输入端与振荡器产生的幅值较 大的锯齿波进行比较,去控制功率开关的占空比。
在每个开关周期内,功率开关的截止时间恒定,导通时间和
开关周期(开关频率)均变化。
3
6.5.2恒定导通时间谷值电流控制技术
? 恒定导通时间谷值电流控制原理如图所示。
电感电流的反馈信号iLf 与电压误差放大器输出的电流给定信号 ir(ue)比较, 当iLf 下降到ir时,功率开关就开通, iLf 上升。功率开关的导通时间,并不是 由电感电流的上升量 Δi Lf 决定的,而是由单稳态触发器设置的恒定高电平时 间决定的。
8
两态调制与正弦脉宽调制原理的比较
a)两态调制
b)正弦脉宽调制
9
具有输出电压反馈的两态调制系统
该系统是一个非线性 控制系统,具有良好 的性能。 改变迟滞比较器的滞 环宽度不但能调节并 稳定调制频率,还能 提高系统的静、动态 性能。
? 如果采用反馈网络为固定电阻的迟滞比较器,则迟滞比 较器的滞环宽度是固定的,而开关频率在变化;