道路标线图像分割方法研究_刘新宇
基于改进蚁群算法的道路图像分割算法研究
基于改进蚁群算法的道路图像分割算法研究作者:侯利龙李让军来源:《决策探索·收藏天下(中旬刊)》 2018年第9期文,侯利龙李让军摘要:为了准确识别出车道线,对滤波后的道路图像,采用增强型45。
Sobel边缘算子进行增强,采用基于改进蚁群算法的二维Otsu算法对图像进行分割,利用分区Hough变换进行拟合,识别出车道线。
结果表明,采用改进的分割算法,能够有效增多车道线的有效特征点,去除噪声,提高算法的抗噪性能。
关键词:车道线;蚁群算法;二维Otsu算法基金项目:郑州科技学院科研项目(2017-XYZK-004)一、引言车道偏离预警系统对安全驾驶辅助系统来说有着非常重要的作用,其关键技术是车道线检测算法。
能否正确分割道路图像,能否准确识别出车道线,关系着后续系统是否能正确预警。
从目前研究现状来看,采用 Sobel 算子、 Canny 算子等经典算法能够识别出车道线,但也存在车辆、广告牌等边缘的干扰。
根据大量研究,本文根据道路图像的特点,将改进蚁群算法和二维 Otsu 算法相结合,获取阈值,将道路图像有效分割,降低噪声的干扰,提高车道线识别的准确性。
二、道路图像预处理环境噪声会严重影响有效车道线特征信息的正确提取,需要对滤波后的道路图像进行预处理,突出特征,使车道线能够清晰地显现。
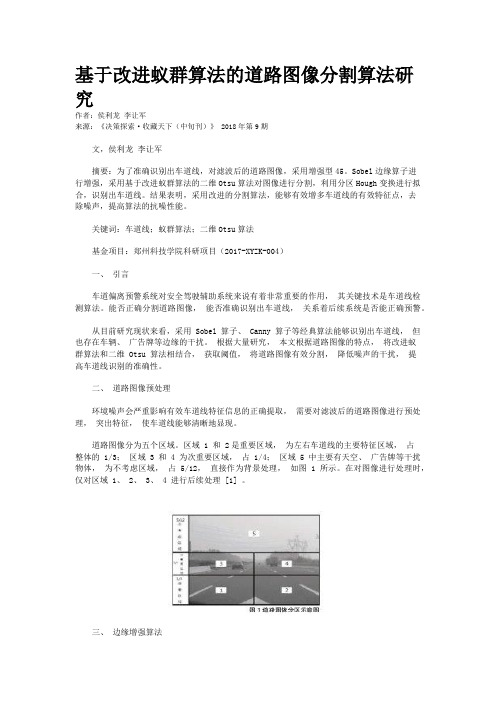
道路图像分为五个区域。
区域 1 和 2是重要区域,为左右车道线的主要特征区域,占整体的 1/3;区域 3 和 4 为次重要区域,占 1/4;区域 5 中主要有天空、广告牌等干扰物体,为不考虑区域,占 5/12,直接作为背景处理,如图 1 所示。
在对图像进行处理时,仅对区域 1、 2、 3、 4 进行后续处理 [1] 。
三、边缘增强算法为突出车道线特征,对道路图像进行边缘增强。
Sobel 算子能够抑制噪声的产生,最大限度地检测出车道线边界特征。
同时为了适应不同环境,本文使用增强型45°Sobel 算子对道路图像进行边缘增强,能够得到显著效果。
一种快速提取的道路标识线识别方法研究
行 。如当第 i 行扫描的像素第一次遇到像素值突变
时 ,记此时点的坐标为 ( x i1 , yi) ,扫描继续进行 ;当 第二次遇到像素值突变时, 记此时点的坐标为
( x i2 , yi) , 此时结束该行的扫描 。当所获取的特征
点数 n < 5 时 ,继续抽行扫描 ,当 n > 5 时 ,扫描结
束。
(5)
i = K+1
其中 Pj ( i) = nj/ N j ,表示 Cj 类灰度值为 i 的像素
出现的概率 , j = 1 ,2 。由式 (3) 、(4) 与 (5) 可知类
内方差与类间方差均为 K 的函数 , 当选取 [ m 1 , m 2 ] 间的某值 K , 使得两类间方差取最大值而两
类内方差取最小值 ,此时的 K 即为最佳阈值 。为了
确识别 。真实的道路标识线不可避免地会存在残
缺 、部分图像的处理失效等情况 ,如果使用前述的 算法对道路标识线进行识别会造成识别失效 ,车辆 的运行可能会产生很大的偏差 。因此 ,必须对以上
算法进行改进 。 针对部分道路标识线失效的情况 ,本文设计了
一种舍弃失效的部分标识线 ,利用剩余的完整的标 识线来获取道路参数的方法 。在该方法中 ,判断一 点是否为失效点的依据有两个 :
2. 1 基于抽行扫描的道路标识线的识别
图 3 为道路标识线识别原理 ,建立如图所示坐
图 3 道路标识线识别原理
标系 ,以图像底边的中心为坐标原点 O , 水平向右
50
2007 年 6 月 中国制造业信息化 第 36 卷 第 11 期
为 x 轴 ,垂直向上为 y 轴 (即为车辆的对称线) 。本 文在对道路进行识别过程中 ,采用左侧道路和右侧 道路分别处理的方法 。设左侧道路标识线中心线 的直线方程为
一种从高分辨率遥感影像中分割道路的新方法

一种从高分辨率遥感影像中分割道路的新方法周绍光;刘娟娟;李昊;陈仁喜【摘要】提出了一种从遥感影像中分割出道路的新策略,其最大的创新之处在于充分考虑了道路的形状特点及沿道路方向的灰度分布特性.比较多个方向上纹理和灰度的一致性,得出一致性最优方向,此方向上的Gabor滤波响应和作为衡量一致性指标的均方差值共同构成本方法的特征矢量.从每一像素出发,沿该点的一致性最优方向绘制一条短线,用短线对应的区域代替现有空间信息FCM模型中的邻域以荻取改进的分割模型.实验表明:这一建立在新的特征矢量和分割模型基础上的方法可以更为有效地从高分辨率遥感影像中分割出复杂的道路目标.%Taking into account the shape of a road and the characteristics of gray value variation on roads' surfaces,a new strategy is given for high resolution remotely sensed images.By comparing the consistency of gray value and one dimensional texture in different directions, the most consistent direction at every pixel is found.The responses of a group of Gabor filters together with the variance indicating the consistency in this direction consist of the feature vector.Starting from a pixel a short line segment along the most consistent direction at this point can be drawn,and all the pixels lying on this short line are defined as the neighbor of the point. With the aid of the newly defined neighbor an improved spatial FCM segmentation model is obtained.Experiments demonstrate that the proposed method can extract roads from other targets in high resolution images more efficiently than some commonly used algorithms.【期刊名称】《计算机工程与应用》【年(卷),期】2011(047)020【总页数】4页(P159-162)【关键词】道路提取;图像分割;空间信息模糊C均值(FCM)模型;纹理分析【作者】周绍光;刘娟娟;李昊;陈仁喜【作者单位】河海大学测绘工程系,南京210098;河海大学测绘工程系,南京210098;河海大学测绘工程系,南京210098;河海大学测绘工程系,南京210098【正文语种】中文【中图分类】TP391.411 引言随着高分辨率卫星的不断发射升空,高分辨率遥感影像成为了一种重要的新数据源,因而从高分辨率遥感影像中提取道路以更新GIS数据成了一个新的研究热点。
基于HSI图像分割的AGV道路标线中心线提取

基于HSI图像分割的AGV道路标线中心线提取姜汉荣;钱晓明【摘要】针对视觉导航AGV的道路标线中心线提取,提出了一种新型的基于HSI 图像分割的方法.该方法首先将原始的RGB图像转换成HSI图像,在此基础上完成图像分割.图像分割所获得的单色位图,经过图像形态学的处理,包括开运算、腐蚀、差运算等,最终可提取出道路标线的中心线.对实际道路图像数据的实验验证了该方法的有效性.与原有方法相比,该方法所需运算简单,实现该方法所需硬件资源消耗小,适合基于嵌入式系统开发的视觉导航AGV.%A path central guide line extraction technique has been proposed based on HIS image segmentation for vision-guided AGV. In this technique, the original RGB images are first converted into HIS images, and the image segmentation is then accomplished in the HIS space. After that, the image data is processed with the morphological methodologies, including the open calculation, corrosion and differentiation, and finally the central guide line is extracted. Experiments on real path images have verified that the proposed technique can work effectively. Compared to the other techniques for vision guided AGV, the proposed technique reduces the calculation complexity and requires less hardware for implementation and fits the AGV with embedded control system.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)035【总页数】4页(P8757-8760)【关键词】自动导引车;视觉导航;HSI图像;形态学【作者】姜汉荣;钱晓明【作者单位】南京航空航天大学机电学院,南京210016;南京航空航天大学机电学院,南京210016【正文语种】中文【中图分类】TP391.76AGV(Automated Guided Vehicle)是指装备有电磁或光学导引装置,能够按照规定的导引路线行驶,具有小车运行和停车装置、安全保护装置以及具有各种移载功能的运输小车[1]。
路面图像分割算法研究
.
/ L
选取 灰度 阈值 t 图像 分 成Sf 度范 围 [ ~t 1) 将 l 灰 0 一 和 1
() 用 lJ 3利 ,重新计 算 : 例
:
Sf 度范 围 [ L 1) , 灰 t 一] ~ 两类 , 计 算S和S两类 出现 的概 先 ,
率 (。tP () 均 值 。 ) t p (, t 、 ) ) ( ( t ) , 和方差仃(盯(, i):) t t然后定 ,
.
{ c 【 , ,l / , 主 _
1 0
, =
() 5
其 他
义计算 图像 的类 间方差 为 : )p(( (一 ) (( 叮 (= 。) t 。 t t t ) + )
.
- j
9
=
(一 ) [ p(-z ) ,p. x ) t ‘ I ) tt [ 。)p( ] ) = . t (] z ( , t t
割 处理 的结果是 比较 理想 的 .因为 图像 中背 景 和裂缝 易 将其分 离 开来 . 里采用 的三种 方法 都是有 效 的 而 这 参 考文 献 : 1 en t R, s ma , 】 h d 数 北 电子 对 象 的灰 度级存 在 明显 的差 异 .恰 当 的选择 阈 值很容 f K n e . Ca e n 朱 志 刚 等译 。 字 图 像 处理 , 京 ,
曩_熏 _ 蹬毽 一 一
隧 _
‘ 。 ’ ‘ 。 。 。 。 。 ’ 。 。 。 。 ‘ 。 ‘ 。 ’ 。 ’ ‘ 。 。 。
法 所 花 时 间 分别 :.1 , .7 , . S 同 时还 可 以看 6 S 5 S 50 。 0 0 7
为验 证新算 法 的有效 性 ,在wiX 操 作系统 下 . nP 采 出 .对 于 目标 和背 景灰 度级 差 别不明显 和存 在背 景灰
公路标识线自动识别中的图像处理及中心线提取方法

公路标识线自动识别中的图像处理及中心线提取方法
陈刚;陈鲁倩;陈坤杰
【期刊名称】《机电一体化》
【年(卷),期】2010()1
【摘要】提出一种公路标识线图像的处理及中心线提取方法。
首先采用CCD图像传感器获取公路标识线图像,然后对图像进行动态中值滤波、阈值法分割、边缘检
测等处理,最后采用最小二乘法提取标识线的中心线。
实验表明,动态中值滤波可以
显著减少图像噪声,同时又保留了大部分的图像边缘信息。
采用最小二乘法能准确、有效提取标识线的中心线,为将来利用标识线的中心线信息来引导道路画线车自动
喷涂作业解决了一个关键技术难题。
【总页数】4页(P37-39)
【关键词】CCD;特征信息;图像处理;标识线
【作者】陈刚;陈鲁倩;陈坤杰
【作者单位】南京农业大学
【正文语种】中文
【中图分类】TQ171.732;TP391.41
【相关文献】
1.采动区公路路灯杆点云中心线提取方法 [J], 陈元非;查剑锋;徐孟强;张正华;李晋
龙
2.复杂工况下视觉AGV导航标识带中心线的提取研究 [J], 佘宏杰;赵燕伟;冷龙龙
3.基于结构光的大锻件尺寸测量中光条纹中心线提取方法 [J], 王邦国;贾振元;刘巍;刘双军;杜剑;贾兴华
4.基于矢量路面提取道路中心线智能提取方法的实现 [J], 刘学民
5.应用MATLAB图像处理技术提取云纹中心线 [J], 宋彦琦;高春艳;牛建广
因版权原因,仅展示原文概要,查看原文内容请购买。
【CN110135247A】一种路面分割中的数据增强方法、装置、设备及介质【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910265171.X(22)申请日 2019.04.03(71)申请人 深兰科技(上海)有限公司地址 200336 上海市长宁区威宁路369号1001单元(实际楼层9楼)(72)发明人 陈海波 (74)专利代理机构 北京同达信恒知识产权代理有限公司 11291代理人 黄志华(51)Int.Cl.G06K 9/00(2006.01)G06K 9/34(2006.01)(54)发明名称一种路面分割中的数据增强方法、装置、设备及介质(57)摘要本发明实施例公开了一种路面分割中的数据增强方法、装置、设备及介质,用以提高数据的泛化能力,从而提升路面分割中的数据增强精确度。
所述路面分割中的数据增强方法,包括:采集包含交通道路信息的原始图像数据;对所述原始图像数据进行至少一次伽马变换,生成与所述原始图像数据图像属性不同的变换图像数据;基于所述原始图像数据和所述变换图像数据进行路面分割中的数据增强计算。
权利要求书1页 说明书5页 附图2页CN 110135247 A 2019.08.16C N 110135247A权 利 要 求 书1/1页CN 110135247 A1.一种路面分割中的数据增强方法,其特征在于,包括:采集包含路面信息的原始图像数据;对所述原始图像数据进行至少一次伽马变换,生成与所述原始图像数据图像属性不同的变换图像数据;基于所述原始图像数据和所述变换图像数据进行路面分割中的数据增强计算。
2.根据权利要求1所述的方法,其特征在于,在对所述原始图像数据进行多次伽马变换时,每次对所述原始图像数据进行伽马变换的变换参数不同。
3.根据权利要求1所述的方法,其特征在于,所述基于所述原始图像数据和所述变换图像数据进行路面分割中的数据增强计算,包括:对所述原始图像数据和所述变换图像数据进行预设处理;基于预设处理后的原始图像数据和预设处理后的变换图像数据进行路面分割中的数据增强计算;其中,所述预设处理包括以下一种或多种:平移、旋转、裁剪、对比度拉伸、对比度压缩、白平衡。
基于改进Otsu阈值分割的车道线分割方法
基于改进Otsu阈值分割的车道线分割方法
唐阳山;张贵洋;田鹏;颜新阳
【期刊名称】《辽宁工业大学学报(自然科学版)》
【年(卷),期】2016(036)002
【摘要】道路标线的分割是车道标线识别的关键技术之一,为了准确的识别车道线,提高标线识别的速度,提出了一种改进的Otsu阈值分割算法.首先对采集到的道路图像进行灰度化处理和图像增强,然后对传统的Otsu阈值分割算法进行改进,算法改进的思想是找出满足类内和类间方差的最大距离的值为最优阈值,并限定阈值搜索范围实现快速分割,最后利用MATLAB进行算法编写对改进的算法验证.实验结果显示改进的算法对车道标线更好的分割,而且处理时间满足实时性要求.车道标线识别是一种有效的算法.
【总页数】4页(P113-116)
【作者】唐阳山;张贵洋;田鹏;颜新阳
【作者单位】辽宁工业大学汽车与交通工程学院,辽宁锦州 121001;辽宁工业大学汽车与交通工程学院,辽宁锦州 121001;辽宁工业大学汽车与交通工程学院,辽宁锦州 121001;辽宁工业大学汽车与交通工程学院,辽宁锦州 121001
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于GA-Otsu的图像分割方法在车道线检测中的应用 [J], 张利;倪洪飞;樊景帅;张勇;刘柳
2.基于改进的二维Otsu的铁路轨道阈值分割方法 [J], 王公桃;黄慧明
3.基于改进Otsu法的自动阈值分割方法 [J], 马英辉
4.基于GA-Otsu的图像分割方法在车道线检测中的应用 [J], 张利;倪洪飞;樊景帅;张勇;刘柳
5.基于改进双阈值分割的车道线检测算法研究 [J], 许烁;何俊红;王栋
因版权原因,仅展示原文概要,查看原文内容请购买。
交通路标图像的分割与识别方法研究
交通路标图像的分割与识别方法研究
吴锦晶;张仁杰;唐春晖
【期刊名称】《光学仪器》
【年(卷),期】2011(033)005
【摘要】对交通道路标志进行实时、正确的识别,是车辆自动导航中的一个重要方面.提出一种基于尺度不变特征变换(SIFT)算法的交通路标识别方法.该方法首先根据交通路标的色彩信息,利用HSV颜色空间对输入含有路标的彩色图像直接进行处理,从而快速分割提取目标区域;然后基于SIFT特征将分割提取的目标图像与数据库中原有图像进行特征匹配,以实现交通路标的识别.实验采用MatLab进行仿真,实验证明该方法具有较高的识别精度和速度,在车辆自动导航中具有较高的应用价值.【总页数】8页(P34-41)
【作者】吴锦晶;张仁杰;唐春晖
【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093
【正文语种】中文
【中图分类】TP391
【相关文献】
1.道路标线图像分割方法研究 [J], 刘新宇;吴勇;李龙
2.基于语义分割的DWTT断口图像识别和评定方法研究 [J], 周飞达; 李晋惠; 梁明
华
3.基于语义分割的DWTT断口图像识别和评定方法研究 [J], 周飞达; 李晋惠; 梁明华
4.TBM掘进岩渣图像分割与识别方法研究 [J], 李青蔚;杜立杰;杨亚磊;刘雷涛;蔡龙;刘金辉
5.TBM掘进岩渣图像分割与识别方法研究 [J], 李青蔚;杜立杰;杨亚磊;刘雷涛;蔡龙;刘金辉
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图1
道路标线图像、 灰度直方 图、 二值化结果
1. 3
基于最大类间方差法分割道路标线图像 最大类间方差方法
[ 5]
求解下列二次方程可得到 Bayes 最小误差阈 值。 (g- ∀ 1)
2 1 2 2 1
是由 Ost u 于 1978 年提
出的 , 它是一种基于判别式分析的方法。把图像 中的像素按灰度 级用阈值 t 划分成 C 0 和 C 1 , 即 C0 = { 0, 1, !, t} , C 1 = { t+ 1 , t+ 2, !, l - 1} 。若 用 , 和 分别表示类内 , 类间和总体方差, 则通过使下列关于 t 的等价的判决准则函数达到 最大来确定最佳阈值 t * , = 3 个准则函数中, t 即当 式中 :
[ 4]
57 1, 执行步骤 2 。 基于最佳阈值法分割道路标线图像分析结果 如图 2~ 6 所示。
为( i , j ) 点的权重系数 , 一般 N ( i, j ) = 1。 3) 求出新阈值; T k + 1 = ( Z0 + Z B ) / 2 4) 如果 T K = T K + 1 则结束, 否则 K = K +
率( 像素个数) 。在较理想状态下, 道路标线图像 中的目标和背景非常清楚 , 灰度直方图呈现明显 的双峰状 , 如图 1( a) 所示。这时可以选取两峰之 间的谷底 ( 最小值) 对应的灰度值为阈值。为避免 把靠近主峰的局部不规则变化误认为是不同的另 一峰 , 可以限制两峰之间的最小距离。 但是 , 实际道路标线图像的情况往往比较复 杂, 而且可能有很多噪声干扰 , 灰度直方图参差不 齐, 很难确 定极大值 和极小值 , 如图 1 ( b) 所示。 另外 , 如果路面有大面积的污染或者没有标线, 则 灰度直方图会出现单峰的情况 , 如图 1( c) 所示。 此方法就不适用于直方图中双峰值差别很大, 或 双峰间的谷宽广而平坦的情况, 以及单峰直方图 的情况。 1. 2 基于最佳阈值法分割道路标线图像 最佳阈值分割方法的基本思想是找到一个门
2 i
当 J ( t ) 取最小值时获得最佳阈值, 即 t * = arg min J ( t) t∀ G 果见图 2~ 6 所示。 1. 5 基于全局阈值法分割结果的比较
( 9)
基于最小误差法分割道路标线图像的分析结
的正态分布, 先
为验证以上基于全局阈值法分割道路标线图 像的有效性, 选取 30 张典型的破损道路标线图像 进行分割 , 由于篇幅所限本文只列出 5 张道路标 线图像的分割结果, 如图 2~ 4 所示。
i= 0
ip i ; ∀ i =
i= 0
ip i ; #( t) =
i= 0
pi,
(g - ∀ 1 ( t) ) h( g) g = P 1( t)
l- 1 2 (g - ∀ 2 ( t) ) h( g) g 2 2 g = t+ 1
;
p i 为灰度 级 i 的像 素出现概率。 基于最大类间方差法分割道路标线图像的分 析结果见 1. 5。 1. 4
[ 6]
=
P 2 ( t)
( 8)
基于最小误差阈值法分割道路标线图像 最小误差法是 Kitt ler 和 Illing w ort h 提出来
[ 3]
的 。最小误差法 中 , 灰度直方图视为目标与 背景像素灰度构成的混合集概率密度函数 p ( g) 的估计 , 通常假设混合集的 2 个分量 p ( g/ i) ( i= 1, 2 ) 服从均值为 ∀ i , 标准差为 验概率为 P i , 即
图7 动态阈值法对道路标线图像分割结果
2
基于动态阈值法分割道路标线图 像
3) 不足之处在于部分图像动态阈值法会比 全局阈值法分割出更多的噪声。
3
当图像的背景和目标灰度变化比较大时, 无 法得到一个适用于整幅图像的全局阈值 , 全局阈 值法一般就不适用了。因此, 人们提出了很多动 态的 局部阈值化算法, 也称 自适应阈值化算法。 本文采用 Chow 和 Kaneko 的动态阈值法 [ 7] 对道 路标线分割, 具体实现步骤如下。 1) 如果子块图像划分的太小 , 则可能出现整 个子块都是道路标线。因此每块子 图像大小为 64 64 像素。将 512 384 像素原图像分割成 8 6 块子图像。 2) 用最小误差阈值法求出每块子图像的阈 值。该阈值 视为 各块 子图 像中 心点 的 阈值 , 用 T ( i, j ) 表示。其中 ( i , j ) 为子块中心点在整个图 像中的坐标。 3) 采用双 线性插值 法, 采 用步骤 2 算 出的 8 6 个 阈 值, 求 出其 他 像 素 点的 阈 值 , 即求 出 T ( i, j ) , ( 0 ∃ i < 512, 0< j ∃ 384) 。 4) 图像每一像素的灰度用 F ( i, j ) 表示, 如果 F( i , j ) > T ( i, j ) , 则判断该点为标线。 如果子块图像没有包含道路标线 , 则此子块 图像的阈值直接用全局阈值代替。试验表明存在 部分道路标线会误判为路面情况。如果子块图像 的阈值用全局阈值和 p - 分位数法确定 98% 为背 景的阈值两者中较小的来代替, 则可以取得较好 的效果。 采用如上的动态阈值法再次对 30 张典型的 破损道路标线图像进行分割, 列出 3 张与全局阈 值法分割有较大区别的图像。如图 7 所示。试验 结果表明 : 1) 用全局阈值法无法正确分割的细节, 采用 动态阈值法可以准确分割出。 2) 对于没有道路标线的图像也只是分割出 一些少量的噪声。
图4
大部分破损的道路标线图像及对应的灰度直方图、 二值化结果
图5
集中部分受污染的道路标线图像及对应的灰度直方图、 二值化结果
图 6 没 有目标的道路标线图像及对应的灰度直方图、 二值化 结果
通过实验得出以下结论: 1) 所取得的效果较好。但是当道路标线局 部轻 微污染时, 最佳阈值法 无法正确分割出来。 当背景部分的阈值接近道路标线的阈值时 , 也同
样无法正确分割。 2) 最大类间方差法对噪声和目标大小十分 敏感 , 几乎都是把背景( 路面) 误判为目标( 道路标 线) 。
道路标线图像分割方法研究 # # # 刘新宇
吴
勇
李
龙
59
3) 最小误差法在通常情况下 , 都能取得较好 的分割效果。只有当背景部分阈值变化较大时, 会分割出较多的噪声 , 对有些细节亦不能正确分 割出来。 4) 当道路没有标线时 , 以上 3 种阈值法都会 分割出大量的噪声, 即无法进行正确的分割。 综上 , 在以上 3 种阈值法分割道路标线图像 时, 最小误差法的分割效果最好。
道路交通标线主要是采用漆类 ( 或热塑材料、 路钮等) 涂料喷涂或安装在路面或障碍物垂面上, 对车辆及行人交通进行管理, 表达指示、 警告、 禁 [ 1] 令及指路的内容, 以组织交通运行, 保障安全 。 由于道路标线经过一段时间使用后 , 会被磨损、 污 染、 剥落等, 需要定期养护, 而目前道路标线养护 数据采集主要由人工现场目测或手工测量采集, 劳动强度大, 效率低 , 且数据的准确度易受人为因 素的影响。为改变这种现状, 可设计出基于机器 视觉的道路标线养护信息自动采集系统[ 2] , 并采 用图像处理技术自动检测道路标线破损 , 其中进 行道路标线图像正确分割是最为关键的一步, 笔 者对此进行了研究。
1
基于全局阈值法分割道路标线图 像
图像分割方法主要有 : 阈值分割方法、 基于边
限阈值, 使按照这个阈值划分目标和背景所产生 的错误分割率为最小。其算法如下 : 1) 设计算图像中的最大和最小灰度值 Z l 和 Z k , 令初始阈值为 : T = ( Z 1 + ZK ) / 2 2) 据阈值 T 将图像分割成目标和背景两部 分, 求出两部分的平均灰度值 Z o 和 Z B ;
P( g ) =
i= 1
P i p ( g/ i) 。
( 5)
式中 : p ( g/ i) =
( g- ∀ i) 1 ex p 2 2 i 2∃ i
58
交通与计算机
2008 年第 6 期
第 26 卷
总 145 期
图2
小部分污染的道路标线ห้องสมุดไป่ตู้像及对应的灰度直方图、 二值化结果
图 3 背景 存在阴影的道路标线图像及对应的灰度直方图、 二值 化结果
56
交通与计算机
2008 年第 6 期
第 26 卷
总 145 期
道路标线图像分割方法研究*
刘新宇
( 武汉理工大学 摘 要
吴
勇
李
龙
武汉 430063 )
水路公路交通安全控制与装备教育部工程研究中心
采用最佳阈值法、 最大类间 方差法、 最小误差法分别对多幅典型的破损道路标线 图像进行 分
割 , 通过分析对比确定用最小误差法 分割道路标线图像效 果较好。但 是采用 最小误 差法分 割道路 标 线存在无法正确分割出细节的缺陷 , 为改善图像的分割效果 , 进一步探讨并决定采用基于 最小误差 的 动态阈值法对道路标线图像进行分割。通过对比全局 阈值法和 动态阈 值法的 优缺点 , 并结 合两者 的 优点 , 提出了动态阈值结合全局阈值 的方法分割道路标线图像 , 取得较好的效果。 关键词 道路标线 ; 图像分割 ; 最小误差阈值法 ; 动态阈值法 文献 标志码 : A 中图分类号 : T P391
K 0
缘法、 基于区域法、 基于特征法 4 种。由于阈值分 割方法特别适合目标和背景对比较强的物体的分 割[ 3] , 而道路标线图像中的标线和背景对比较强, 因此本文只探讨阈值 分割方法分割 道路标线图 像。 1. 1 基于直方图法分割道路标线图像 直方图方法是指直接从原图像的灰度直方图
Z( i, j ) Zo =
Z( i, j ) < T