第七章 线性离散系统的分析与校正胡寿松自动控制原理第五版教材答案
自动控制原理第七章习题答案

⑷ c(k 2) 5c(k 1) 6c(k) cos k , c(0) c(1) 0 。 2
解:⑴ c(k 2) 6c(k 1) 8c(k) r(k) , c(0) c(1) 0 ;
C(z)
1
z z z z ;
(z 2)(z 4) z 1 3(z 1) 2(z 2) 6(z 4)
c(nt) 1 (2 3 2n 4n ) , n 0 。 6
⑵ c(k 2) 2c(k 1) c(k) r(k) , c(0) c(1) 0;
C(z)
1 (z 1)2
Tz (z 1)2
; c(nT )
d dz
T zn (z 1)2
z 1
d dz
bc
;
E(z)
(k1ecT
k2ebT
k3eaT )z 2 (k1e(ab)T k2e(ac)T (z eaT )(z ebT )(z ecT )
k3e(bc)T )z
。
7-2 采样周期为 T ,试求下列函数的 Z 变换: ⑴ e(nT ) an ; ⑵ e(t) t 2e3t ;
Z[t f (t)] T z d F(z) 。 dz
证明:由 Z 变换的定义及等值变换进行证明得,
Z[t f (t)] nT f (nT )zn T z
d f (nT )zn T z d
f (nT )zn T z d F(z) 。
n0
n0 d z
1
1
1
;
(b a)(c a)(s a) (a b)(c b)(s b) (a c)(b c)(s c)
胡寿松《自动控制原理》课后习题及详解(线性离散系统的分析与校正)【圣才出品】

第 7 章 线性离散系统的分析与校正 7-1 试根据定义 确定下列函数的 和闭合形式的 E(z): 解:(1)由题意可得
令
,可得:
(2)将
展成部分分式得:
其中,
则有
经采样拉氏变换得:
令
,可得:
。
7-2 试求下列函数的 z 变换:
将 z 1 代入到 D z ,得
1 由劳斯稳定判据可知使系统稳定的 K 值取值范围是 0 K 1.6631。
解:(1)对输入 对 作 z 变换得: 则有: 用幂级数法可得
图 7-3 开环离散系统 作 z 变换得:
所以
(2)由题可知: 且有
则 所以
。
10 / 26
圣才电子书 十万种考研考证电子书、题库视频学习平台
7-14 试判断下列系统的稳定性: (1)已知闭环离散系统的特征方程为
解:(1)由题可知
图 7-4 离散系统
z 域特征方程为: 特征值为: 由于 z1 1,因此闭环系统不稳定。
将 z 1 代入到 D z ,得 特征方程为:
1 特征值为: 由于 2 0 ,故闭环系统不稳定。 (2)特征方程为
12 / 26
圣才电子书 十万种考研考证电子书、题库视频学习平台
则有:
。
7-9 设开环离散系统如图 7-1 所示,试求开环脉冲传递函数 G(z)。
解:系统 a
图 7-1 开环采样系统
系统 b
6 / 26
圣才电子书 十万种考研考证电子书、题库视频学习平台
7-10 试求图 7-2 闭环离散系统的脉冲传递函数 Φ(z)或输出 z 变换 C(z)。
自动控制原理第五版 胡寿松课后习题答案完整版

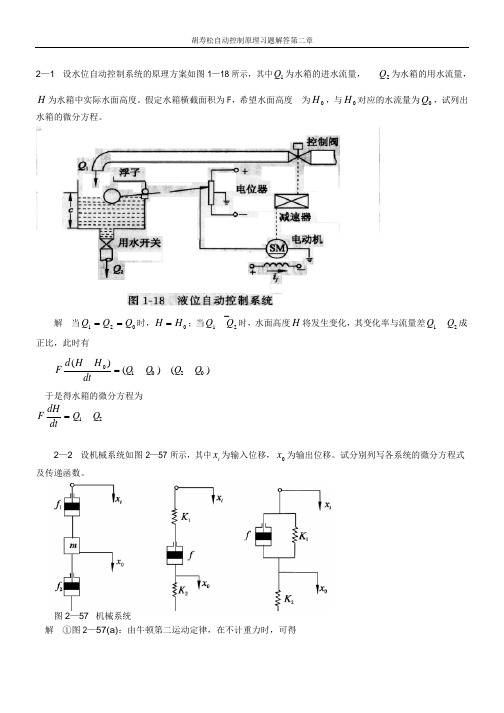
第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c 。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?(1)222)()(5)(dt t r d t t r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++; (3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
《自动控制原理》第七章 线性离散系统的分析与校正

第七章线性离散系统的分析与校正工业过程控制越来越多的使用计算机,从微观上看计算机是非连续的。
计算机采集数据和发生控制指令都有一定的时间间隔。
基于工程实践的需要,作为分析与设计计算机控制系统的基础理论,离散系统理论的发展非常迅速。
离散系统与连续系统相比,既有本质上的不同,又有分析研究方面的相似性。
利用z变换法研究离散系统,可以把连续系统中的许多概念和方法,推广应用于线性离散系统。
本章主要讨论线性离散系统的分析和校正方法。
首先建立信号采样和保持的数学描述,然后介绍z变换理论和脉冲传递函数,最后研究线性离散系统稳定性和性能的分析与校正方法。
在系统校正部分,我们将主要讨论数字机控制系统的校正方法。
7-1 离散系统的基本概念如果控制系统中的所有信号都是时间变量的连续函数,换句话说,这些信号在全部时间上都是已知的,则这样的系统称为连续时间系统,简称连续系统;如果控制系统中有一处或几处信号是一串脉冲或数码,换句话说,这些信号仅定义在离散时间上,则这样的系统称为离散时间系统,简称离散系统。
通常,把系统中的离散信号是脉冲序列形式的离散系统,称为采样控制系统或脉冲控制系统;而把数字序列形式的离散系统,称为数字控制系统或计算机控制系统。
1.采样控制系统一般说来,采样系统是对来自传感器的连续信息在某些规定的时间瞬时上取值。
例如,控制系统中的误差信号可以是断续形式的脉冲信号,而相邻两个脉冲之间的误差信息,系统并没有收到。
如果在有规律的间隔上,系统取到了离散信息,则这种采样称为周期采样;反之,如果信息之间的间隔是时变的,或随机的,则称为非周期采样,或随机采样。
本章仅讨论等周期采样。
在这一假定下,如果系统中有几个采样器,则它们应该是同步等周期的。
在现代控制技术中,采样系统有许多实际的应用。
例如,雷达跟踪系统,其输入信号只能为脉冲序列形式;又如分时系统,其数据传输线在几个系统中按时间分配,以降低信息传输费用。
在工业过程控制中,采样系统也有许多成功的应用。
胡寿松《自动控制原理》章节题库(线性离散系统的分析与校正)【圣才出品】

0.5T kv
0.5T kT
由叠加原理知系统在输入信号 r t 作用下稳态误差为 ess
0.5T kT
则有 0.5T 0.5 k 1 。由(1)(2)可知, k 的取值范围为:1 k 2.67 。 kT
4 / 72
圣才电子书 十万种考研考证电子书、题库视频学习平台
2.某离散系统框图如图 7-2 所示,T 0.25s ,系统参考输入信号 r t 8 0.5t ,求使
系统稳态误差 ess 0.5 的 k 的取值范围。
答: (1) 系统特征方程为: 令 z 1 ,可得
1
图 7-2
3 2 列劳斯表: 1
0
0.25k
2 0.75k
2 0.75k 4 0.75k 0.25k 2 0.25k
1)(z
z(2z 1.368) 0.368) z(2z
1.368)
=
2+1.368z1 3 5.736z1 3.104z2
0.368z3
由以上可得出系统在T 0.1采样周期下的单位阶跃响应:
3 / 72
圣才电子书 十万种考研考证电子书、题库视频学习平台
c*(t) 5(t) 7.104(t T) 3.104(t 2T)
Kv
lim(z
z 1
1)G(z)
lim( z
z 1
1)
(z
z(1 e10T ) 1)(z e10T
)
1,
系统在 r(t) t 作用时稳态误差 ess ()
T Kv
T 1
0.1,解得T
0.1。
(2)T+0.1 时,系统的闭环传递函数为:
z(2z e10T 1)
(z)
自动控制原理(胡涛松)第五版课后习题答案PPT文档24页

11、用道德的示范来造就一个人,显然比用法律来约束他更有价值。—— 希腊
12、法律是无私的,对谁都一视同仁。在每件事上,她都不徇私情。—— 托马斯
13、公正的法律限制不了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!24▪ Nhomakorabea26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
自动控制原理胡寿松第七章解析
1、线性定理 齐次性 Z [ae (t)] aE(z ) Z[e1 (t) e 2 (t)] E1 (z ) E 2 (z ) 叠加性 2、实数位移定理
Z[e(t- kT )] z -k E(z)
Z [e(t kT)] z k [E(z)- e(nT)z -n ]
n 0
k -1
z变换实际上是采样函数拉氏变换的变形,
因此又称为采样拉氏变换
z变换只适用于离散函数,或者说只能表征
连续函数在采样时刻的特性,而不能反映其 在采样时刻之间的特性。
24
成都信息工程学院控制工程系
第七章 线性离散系统的分析与校正
25
成都信息工程学院控制工程系
第七章 线性离散系统的分析与校正
二、Z变换的性质
0T
*
采样器可以用一个周期性闭合的采样开关S来表示。
理想采样开关S: T (t ) (t nT )
n 0
11
成都信息工程学院控制工程系
第七章 线性离散系统的分析与校正
理想单位脉冲序列 采样过程可以看成是一个幅值调制过程。
12
成都信息工程学院控制工程系
第七章 线性离散系统的分析与校正
1 jns t T ( t ) e T n -
1 jns t * 代入采样信号表达式:e ( t ) e( t ) T (t ) e( t )e T n
对采样信号表达式取拉氏变换: 1 E* (s) E(s jns ) T n 采样信号的付氏变换: 1 E* ( j ) E[j( ns )] T n
T (t)的付氏级数形式:
T (t)
n -
(t - nT) C e
自动控制原理_胡寿松第5版_课后习题及答案_完整_.(DOC)
mdx0(f
f)dx0f
dxi
dt2
12dt
1dt
将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得
ms2(f
f2
)sX
0(s)
f1sXi
(s)
于是传递函数为
X0(s)
Xi(s)
f1
msf1f2
②图2—57(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。引出点处取为辅助点B。则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:
解:系统结构图及微分方程得:
G(s)
20
6s10
H(s)
10
20s5
1020
E(s)1010
C(s)
10G(s)
6s10
R(s)
1G(s)H(s)
2010
R(s)
1G(s)H(s)12010
1
6s1020s5
6s1020s5
10(20s5)(6s10)
1200s21500s500
200(20s5)
200(20s5)
图2-58电网络与机械系统
1
R1
1CsRR
解:(a):利用运算阻抗法得:Z
R//
111
11Cs
RCs
Ts
1R1
1
C1s
11111
Z2R2
1
C2s
1
C2s
R2C2
s1
1
C2s
T2s1
U(s)Z
1
(T2s1)
Cs
(Ts1)(Ts1)
所以:02212
Ui(s)