计算机图形学-作业答案-几何图形流水线
计算机图形学智慧树知到答案章节测试2023年中国地质大学(武汉)

第一章测试1.计算机图形学产生图形,计算机图像学产生图像。
()A:对B:错答案:B2.下列哪项不属于计算机图形学的应用领域?()A:虚拟现实B:游戏实时显示C:科学计算可视化D:计算机辅助设计E:数字电影制作F:识别图片中的动物答案:F3.本课程将讲不讲解以下哪个内容?()A:动画生成B:真实感图像生成C:曲线生成D:游戏制作答案:D4.使用OPENGL画带颜色的直线,需要调用不同的函数,分别指定颜色和起始点坐标。
()A:错B:对答案:B5.在OPENGL中定义的结点仅包含位置信息。
()A:对B:错答案:B第二章测试1.四面体的表面建模中,可用四个三角形来描述四面体的表面,每个三角形包含三个点,因此,四面体中点的总个数为()。
A:12B:6C:4D:9答案:C2.三次BEZIER曲线有几个控制点?()A:3B:5C:4D:6答案:C3.三次BEZIER曲线经过几个控制点?()A:3B:4C:2D:1答案:C4.不经过Y轴的斜线绕Y轴旋转得到的曲面是()A:半球面B:球面C:柱面D:圆台面答案:B5.BEZIER曲线上的所有点都是由控制点经过插值得到的。
()A:错B:对答案:A第三章测试1.通过变换可以将单位圆变成长半轴2短轴0.5的椭圆,具体实施步骤是()。
A:水平方向做平移变换,竖值方向做平移变换B:水平方向做拉伸变换,竖值方向做平移变换C:水平方向做收缩变换,竖值方向做拉伸变换D:水平方向做拉伸变换,竖值方向做收缩变换答案:B2.变换前后二线夹角保持不变的保角变换有()A:镜像B:旋转C:平移D:缩放答案:D3.水平方向的剪切变换,如果表达为x’=ax+by y’=c x+dy,则有()。
A:b=1,c=1,d=0B:a=0,b=1,c=1C:a=1,b=0,d=1D:a=1,c=0,d=1答案:D4.正交变换不包括()。
A:剪切B:镜像C:旋转D:平移答案:A5.变换的复合运算不满足交换律。
《计算机图形学基础》第一次作业参考答案
《计算机图形学基础》第一次作业参考答案一、名词解释1、计算机图形学:是使用计算机通过算法和程序在显示设备上构造出图形来,是真实物体或虚构物体的图形综合技术。
2、图像处理:是景物或图象的分析技术,它所研究的是计算机图形学的逆过程。
包括图象增强、模式识别、景物分析、计算机视觉等,并研究如何从图象中提取二维或三维物体的模型。
3、逐点比较法:这是绘图仪经常采用的一种方法,就是在绘图过程中,绘图笔每画一笔,就与规定图形进行比较,然后决定下一步的走向,用步步逼近的方法画出规定的图形。
4、造型技术:要在计算机中构造三维物体的一幅图像,首先必须在计算机中构造出该物体的模型,这一模型是由一批几何数据及数据之间的拓朴关系来表示,这就是造型技术。
二、简答1、计算机图形系统的组成包括哪些?答:计算机图形系统由硬件和软件两部分组成,硬件包括:主计算机、图形显示器以及I/O交互工具和存储设备;软件包括操作系统、高级语言、图形软件和应用软件。
现代计算机图形系统与一般计算机系统最主要的差别是具有图形的输入、输出设备以及必要的交互工具,在速度和存储容量上具有较高的要求。
另外,人也是这个系统的组成部分。
2、简述图形软件的组成。
答:图形软件系统应该具有良好的结构,要有合理的层次结构的模块结构,以便于设计、维护和调试。
1、零级图形软件:是最底层的软件,主要解决图形设备与主机的通讯、接口等问题,又称设备驱动程序,是一些最基本的输入、输出子程序,要求程序质量高,它是面向系统的,而不是面向用户的。
2、一级图形软件:又称基本子程序,包括生成基本图形元素,对设备进行管理的各程序模块,既面向系统又面向用户。
3、二级图形软件:也称功能子程序,是在一级图形软件基础上编制的,其主要任务是建立图形数据结构,定义、修改和输出图形;以及建立各图形设备之间的联系,要具有较强的交互功能,它是面向用户的。
(以上三级通常称为支撑软件)4、三级图形软件:是为解决某种应用问题的图形软件,是整个应用软件的一部分,通常由用户编写或与设计者一起编写。
《计算机图形学》练习试题及参考答案(四)
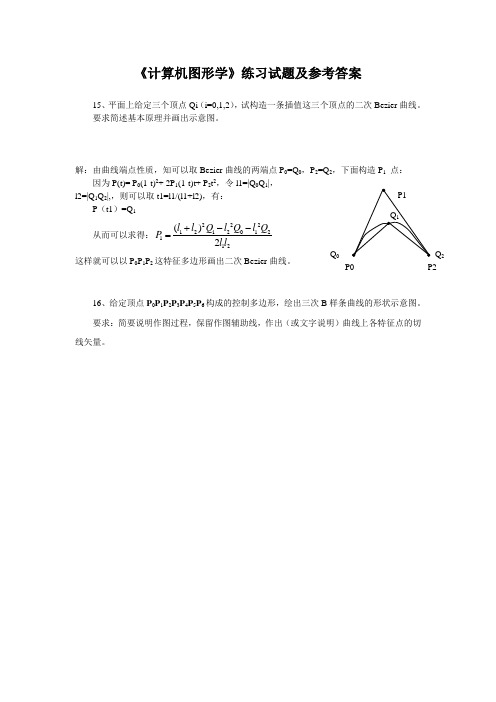
《计算机图形学》练习试题及参考答案15、平面上给定三个顶点Qi (i=0,1,2),试构造一条插值这三个顶点的二次Bezier 曲线。
要求简述基本原理并画出示意图。
解:由曲线端点性质,知可以取Bezier 曲线的两端点P 0=Q 0,P 2=Q 2,下面构造P 1 点: 因为P(t)= P 0(1-t)2+ 2P 1(1-t)t+ P 2t 2,令l1=|Q 0Q 1|,l2=|Q 1Q 2|,,则可以取t1=l1/(l1+l2),有: P (t1)=Q 1从而可以求得:2221212012112()2l l Q l Q l Q P l l +--=这样就可以以P 0P 1P 2这特征多边形画出二次Bezier 曲线。
16、给定顶点P 0P 1P 2P 3P 4P 5P 6构成的控制多边形,绘出三次B 样条曲线的形状示意图。
要求:简要说明作图过程,保留作图辅助线,作出(或文字说明)曲线上各特征点的切线矢量。
P0 P2Q 0Q 2画出以P0P1P2 P3决定的地0段3次样条曲线:M1为P0P2的中点,A点位于P1M1的1/3处,A点的切矢平行于P0P2,且等于P0P2的1/2,A点的二阶导数矢量为中线矢量P1M1的两倍;M2为P2P3的中点,B点位于P2M2的1/3处,A点的切矢平行于P1P3,且等于P1P3的1/2,B点的二阶导数矢量为中线矢量P2M2的两倍;正确标出A、B两点、指出A、B点的切矢、指出A、B点的二阶导数矢量以同样的方法画出其它样条曲线。
16、如图,取正方形四个顶点P0,P1,P2,P3作为特征多边形顶点,采用二次B样条曲线绘出光滑封闭曲线的形状示意图。
采用三次B样条曲线绘出光滑封闭曲线的形状示意图。
要求:简要说明作图过程,保留作图辅助线,作出(或文字说明)曲线上各特征点的切线矢量。
1)作图简述:先画由P 0P 1P 2三点所决定的一段曲线。
取P 0P 1中点,该点的切矢方向及大小都与P 0P 1向量相同。
《计算机图形学》章习题解答
(b)绕点P(-1,-1)。
答:三角形矩阵 ,设旋转之后的三角形矩阵为S’
逆时针旋转矩阵
平移矩阵 反平移矩阵
(a) ,得
(b) ,得
。
2.将三角形A(0,0),B(1,1),C(5,2)放大两倍,保持C(5,2)不变。
答:
得: 。
3.将类似菱形的多边形A(-1,0),B(0,-2),C(1,0),D(0,2)进行如下的反射变换:
六个不等式为:
其中:
(b)对于透视规范化观察体,内部点满足:
六个不等式为:
其中:
10.写出平面和线段的交点坐标。
答:假设平面通过点 ,且有法线向量 , 和 是线段的两个端点。
平面的一般方程是:
直线的参数方程是:
将直线方程代入平面方程,求解t,得到交点处的参数值 :
用向量符号重写为:
由直线的参数方程可以求出交点 :
(4)进行步骤(2)和(1)的逆变换,变换矩阵为 和 。
设向量 ,则有 ,所以变化矩阵为:
8.如何确定一个点P在观察点的内部还是外部?
答:一个平面将空间分成两部分。平面的一般方程是:
对于任意点 ,若定义一个标量函数 ,有:
如果 ,则说明P点和Q点在同一边(相对平面而言)。令 分别表示顶平面、底平面、右平面、左平面、前平面、后平面。
答:设三维图形绕x轴逆时针旋转 角度,绕y轴逆时针旋转 角度,变换矩阵为:
7.写出关于某个给定平面对称的镜面反射变换。(注:用一个法向量N和 参考点确定一个参考平面。)
答:
(1)将 平移到原点,变换矩阵为 ;
(2)使法线向量N平行于xy平面的法线向量K,变换矩阵为 ;
(3)进行关于xy平面的镜面反射变换,变换矩阵为 ;
《计算机图形学》习题与解答
《计算机图形学》习题与解答第一章概述1. 试描述你所熟悉的计算机图形系统的硬软件环境。
计算机图形系统是计算机硬件、图形输入输出设备、计算机系统软件和图形软件的集合。
例如:计算机硬件采用PC、操作系统采用windows2000,图形输入设备有键盘、鼠标、光笔、触摸屏等,图形输出设备有CRT、LCD等,安装3D MAX图形软件。
2. 计算机图形系统与一般的计算机系统最主要的差别是什么?3. 图形硬件设备主要包括哪些?请按类别举出典型的物理设备?图形输入设备:鼠标、光笔、触摸屏和坐标数字化仪,以及图形扫描仪等。
图形显示设备:CRT、液晶显示器(LCD)等。
图形绘制设备:打印机、绘图仪等。
图形处理器:GPU(图形处理单元)、图形加速卡等等。
4. 为什么要制定图形软件标准?可分为哪两类?为了提高计算机图形软件、计算机图形的应用软件以及相关软件的编程人员在不同计算机和图形设备之间的可移植性。
图形软件标准通常是指图形系统及其相关应用系统中各界面之间进行数据传送和通信的接口标准,另外还有供图形应用程序调用的子程序功能及其格式标准。
5. 请列举出当前已成为国际标准的几种图形软件标准,并简述其主要功能。
(1)CGI(Computer Graphics Interface),它所提供的主要功能集包括控制功能集、独立于设备的图形对象输出功能集、图段功能集、输入和应答功能集以及产生、修改、检索和显示以像素数据形式存储的光栅功能集。
(2)GKS(Graphcis Kernel System),提供了应用程序和图形输入输出设备之间的接口,包括一系列交互和非交互式图形设备的全部图形处理功能。
主要功能如下:控制功能、输入输出功能、变换功能、图段功能、询问功能等。
6. 试列举计算机图形学的三个应用实例。
(1)CAD/CAM(2)VISC(3)VR.第二章光栅图形学1. 在图形设备上如何输出一个点?为输出一条任意斜率的直线,一般受到哪些因素影响?若图形设备是光栅图形显示器,光栅图形显示器可以看作是一个像素的矩阵,光栅图形显示器上的点是像素点的集合。
《计算机图形学》练习试题及参考答案
《计算机图形学》练习试题及参考答案一、选择题1.计算机图形学的研究对象是图形的表示、存储、( )和转换。
A.生成B.显示C.打印D.传输参考答案:B2.在计算机中,图形信息通常以( )形式存储A.数组B.字符串C.树状D.图形块参考答案:A3.下列哪个不属于计算机图形学的应用领域?A.计算机辅助设计B.虚拟现实C.办公自动化D.计算机艺术参考答案:C4.在计算机图形学中,( )是指将一个图形按照一定的比例和方向变换到新的位置。
A.缩放B.平移C.旋转D.镜像参考答案:B5.以下哪个不属于基本的图形变换?A.缩放B.旋转C.剪切D.反射参考答案:C6.在计算机图形学中,( )是指在图形上按照一定的方式进行填充。
A.着色B.填充C.描绘D.渲染参考答案:B7.在计算机图形学中,( )是指将一个图形分解成多个小三角形的过程。
A.细分B.纹理映射C.光照D.阴影参考答案:A8.以下哪个不属于计算机图形学的主要任务?A.图形设计B.图形输入C.图形输出D.图形处理参考答案:A9.在计算机图形学中,( )是指将图形按照一定的方式进行着色。
A.着色器B.渲染器C.显示器D.输入器参考答案:A10.在计算机图形学中,( )是指在图形上施加光照和材质,以产生真实感的效果。
A.渲染B.着色C.细化D.纹理映射参考答案:A二、填空题1.计算机图形学是研究图形的表示、存储、______、______和转换的学科。
参考答案:生成、显示2.在计算机中,图形信息通常以______形式存储。
参考答案:数组3.______是指将一个图形按照一定的比例和方向变换到新的位置。
参考答案:平移4.在计算机图形学中,______是指在图形上按照一定的方式进行填充。
参考答案:填充5.在计算机图形学中,______是指将一个图形分解成多个小三角形的过程。
参考答案:细分6.______是指将图形按照一定的方式进行着色。
参考答案:着色器7.______是指在图形上施加光照和材质,以产生真实感的效果。
《计算机图形学》练习试题及参考答案大全
《计算机图形学》练习试题及参考答案(后面有答案)一、名词解释:(每个4分)1.计算机图形学2.图象处理3.模式识别4.计算几何5.凸多边形6.种子填充算法7.窗口8.视区9.光顺性10.拟合11.多项式插值12.小挠度曲线13.图形变换14.齐次坐标系15.凸包16.轮廓线17.等值线18.图形的翼边表示19.ER模型20.图形消隐21.本影22.半影23.用户坐标系24.规范化设备坐标系25.构造26.约束技术27.光线跟踪28、走样29、CRT(Cathode Ray Tube)30、隔行(interlaced)扫描31、输入模式32、取样方式(sample mode)33、区域34、边界表示法35、复合变换36、二维复合平移37.二维复合比例38.二维复合旋转39.视区(Viewport)40、投影变换41、平面几何投影42. 参数图43. 像素图44.人机界面45.地理信息系统46.虚拟现实47.几何造型技术48.扫描转换49. 插值曲线50.逼近曲线51. 用户接口52. 交互技术53. 交互式图形系统的基本交互任务54. 定位任务55. 选择任务56. 拾取任务57 .选择技术58. 菜单技术59. 文字输入任务60. 数值输入任务61.动画62.帧63.场64. 消隐65.物体空间的消隐算法66. 漫反射光67. 环境光68. 镜面反射光二、选择题(每题2分)1、计算机图形学与计算几何之间的关系是( )。
A)学术上的同义词B)计算机图形学以计算几何为理论基础C)计算几何是计算机图形学的前身D).两门毫不相干的学科2、计算机图形学与计算机图象学的关系是( )。
A)计算机图形学是基础,计算机图象学是其发展B)不同的学科,研究对象和数学基础都不同,但它们之间也有可转换部分C)同一学科在不同场合的不同称呼而已D)完全不同的学科,两者毫不相干3、触摸屏是( )设备。
A)输入B)输出C)输入输出D)既不是输入也不是输出4.计算机绘图设备一般使用什么颜色模型?( )A)RGB;B)CMY;C)HSV ;D)HLS5. 计算机图形显示器一般使用什么颜色模型?( )A)RGB;B)CMY;C)HSV ;D)HLS6.分辨率为1024×1024的显示器各需要多少字节位平面数为24的帧缓存?( ) A)512KB;B)1MB;C)2MB ;D)3MB7.哪一个不是国际标准化组织(ISO)批准的图形标准?( )A)GKS;B)PHIGS;C)CGM ;D)DXF8.下述绕坐标原点逆时针方向旋转a角的坐标变换矩阵中哪一项是错误的? ( )| A B || C D |A) cos a;B) sin a;C) sin a;D) cos a9、在多边形的逐边裁剪法中,对于某条多边形的边(方向为从端点S到端点P)与某条裁剪线(窗口的某一边)的比较结果共有以下四种情况,分别需输出一些顶点.请问哪种情况下输出的顶点是错误的? ( )A)S和P均在可见的一侧,则输出S和P.B)S和P均在不可见的一侧,则输出0个顶点.C)S在可见一侧,P在不可见一侧,则输出线段SP与裁剪线的交点.D)S在不可见的一侧,P在可见的一侧,则输出线段SP与裁剪线的交点和P.10、在物体的定义中对边的哪条限制不存在? ( )A) 边的长度可度量且是有限的B) 一条边有且只有两个相邻的面C) 一条边有且只有两个端点D) 如果一条边是曲线,那么在两个端点之间不允许曲线自相交11.下述哪一条边不是非均匀有理B样条(NURBS)的优点? ( )A) NURBS比均匀B样条能表示更多的曲面B) 对于间距不等的数据点,用NURBS拟合的曲线比用均匀B样条拟合的曲线更光滑C) NURBS提供的权控制方法比用控制点更能有效的控制曲线的形状D) 使用NURBS可以提高对曲面的显示效率12.下列关于图的存储表示的叙述中,哪一个是不正确的?A) 无向图的相邻矩阵是对称矩阵B) 对于带权的图,其相邻矩阵中值为1的元素,其值可以用边的权来权替C) 用邻接表法存储包括n个结点的图需要保存一个顺序存储的结点表和n个链接存储的边表D) 用邻接表法存储包括n条边的图需要保存一个顺序存储的结点表和n个链接存储的边表13*.在面片的数量非常大的情况下哪一个消隐算法速度最快? ( )A) 深度缓存算法(Z-Buffer)B) 扫描线消隐算法C) 深度排序算法(画家算法)D) 不知道14*.下面关于深度缓存消隐算法(Z-Buffer)的论断哪一条不正确? ( )A) 深度缓存算法并不需要开辟一个与图像大小相等的深度缓存数组B) 深度缓存算法不能用于处理对透明物体的消隐C) 深度缓存算法能并行实现D) 深度缓存算法中没有对多边形进行排序15.在用射线法进行点与多边形之间的包含性检测时,下述哪一个操作不正确? ( )A) 当射线与多边形交于某顶点时且该点的两个邻边在射线的一侧时,计数0次B) 当射线与多边形交于某顶点时且该点的两个邻边在射线的一侧时,计数2次C) 当射线与多边形交于某顶点时且该点的两个邻边在射线的两侧时,计数1次D) 当射线与多边形的某边重合时,计数1次16*、扫描消隐算法在何处利用了连贯性(相关性Coherence)?(1)计算扫描线与边的交点;(2)计算多边形在其边界上的深度;(3)计算多边形视窗任意点处的深度值;(4)检测点与多边形之间的包含性。
【中南大学】计算机图形学习题及答案
计算机图形学作业答案第一章序论第二章图形系统1.什么是图像的分辨率?解答:在水平和垂直方向上每单位长度(如英寸)所包含的像素点的数目。
2.计算在240像素/英寸下640×480图像的大小。
解答:(640/240)×(480/240)或者(8/3)×2英寸。
3.计算有512×512像素的2×2英寸图像的分辨率。
解答:512/2或256像素/英寸。
第三章二维图形生成技术1.一条直线的两个端点是(0,0)和(6,18),计算x从0变到6时y所对应的值,并画出结果。
解答:由于直线的方程没有给出,所以必须找到直线的方程。
下面是寻找直线方程(y =mx+b)的过程。
首先寻找斜率:m =⊿y/⊿x =(y2-y1)/(x2-x1)=(18-0)/(6-0) = 3 接着b在y轴的截距可以代入方程y=3x+b求出 0=3(0)+b。
因此b=0,所以直线方程为y=3x。
2.使用斜截式方程画斜率介于0°和45°之间的直线的步骤是什么?解答:(1)计算dx:dx=x2-x1。
(2)计算dy:dy=y2-y1。
(3)计算m:m=dy/dx。
(4)计算b: b=y1-m×x1(5)设置左下方的端点坐标为(x,y),同时将x end设为x的最大值。
如果dx < 0,则x=x2、y=y2和x end=x1。
如果dx > 0,那么x=x1、y=y1和x end=x2。
(6)测试整条线是否已经画完,如果x > x end就停止。
(7)在当前的(x,y)坐标画一个点。
(8)增加x:x=x+1。
(9)根据方程y=mx+b计算下一个y值。
(10)转到步骤(6)。
3.请用伪代码程序描述使用斜截式方程画一条斜率介于45°和-45°(即|m|>1)之间的直线所需的步骤。
假设线段的两个端点为(x1,y1)和(x2,y2),且y1<y2int x = x1, y = y1;float x f, m = (y2-y1)/(x2-x1), b = y1-mx1;setPixel( x, y );/*画一个像素点*/while( y < y2 ) {y++;x f = ( y-b)/m;x = Floor( x f +0.5 );setPixel( x, y );}4.请用伪代码程序描述使用DDA算法扫描转换一条斜率介于-45°和45°(即|m| ≤1)之间的直线所需的步骤。
计算机图形学教程课后习题参考答案
计算机图形学教程课后习题参考答案(总26页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第一章1、试述计算机图形学研究的基本内容答:见课本P5-6页的节。
2、计算机图形学、图形处理与模式识别本质区别是什么请各举一例说明。
答:计算机图形学是研究根据给定的描述,用计算机生成相应的图形、图像,且所生成的图形、图像可以显示屏幕上、硬拷贝输出或作为数据集存在计算机中的学科。
计算机图形学研究的是从数据描述到图形生成的过程。
例如计算机动画制作。
图形处理是利用计算机对原来存在物体的映像进行分析处理,然后再现图像。
例如工业中的射线探伤。
模式识别是指计算机对图形信息进行识别和分析描述,是从图形(图像)到描述的表达过程。
例如邮件分捡设备扫描信件上手写的邮政编码,并将编码用图像复原成数字。
3、计算机图形学与CAD、CAM技术关系如何答:见课本P4-5页的节。
4、举3个例子说明计算机图形学的应用。
答:①事务管理中的交互绘图应用图形学最多的领域之一是绘制事务管理中的各种图形。
通过从简明的形式呈现出数据的模型和趋势以增加对复杂现象的理解,并促使决策的制定。
②地理信息系统地理信息系统是建立在地理图形基础上的信息管理系统。
利用计算机图形生成技术可以绘制地理的、地质的以及其它自然现象的高精度勘探、测量图形。
③计算机动画用图形学的方法产生动画片,其形象逼真、生动,轻而易举地解决了人工绘图时难以解决的问题,大大提高了工作效率。
5、计算机绘图有哪些特点答:见课本P8页的节。
6、计算机生成图形的方法有哪些答:计算机生成图形的方法有两种:矢量法和描点法。
①矢量法:在显示屏上先给定一系列坐标点,然后控制电子束在屏幕上按一定的顺序扫描,逐个“点亮”临近两点间的短矢量,从而得到一条近似的曲线。
尽管显示器产生的只是一些短直线的线段,但当直线段很短时,连成的曲线看起来还是光滑的。
②描点法:把显示屏幕分成有限个可发亮的离散点,每个离散点叫做一个像素,屏幕上由像素点组成的阵列称为光栅,曲线的绘制过程就是将该曲线在光栅上经过的那些像素点串接起来,使它们发亮,所显示的每一曲线都是由一定大小的像素点组成的。
计算机图形学1_8章习题解答
《计算机图形学》1-4章习题解答习题11.计算机图形学的研究内容是什么?答:几何模型构造,图形生成,图形操作与处理,图形信息的存储、检索与交换,人机交互及用户接口,动画,图形输出设备与输出技术,图形标准与图形软件包的研究等。
2.计算机图形学与图像处理有何联系?有何区别?答:计算机图形学与图像处理都是用计算机来处理图形和图像,结合紧密且相互渗透,但其属于两个不同的技术领域。
计算机图形学是通过算法和程序在显示设备上构造图形,是从数据到图像的处理过程;而图像处理是对景物或图像的分析技术,是从图像到图像的处理过程。
3.简述计算机图形学的发展过程。
答:略。
(参考:教材P3)4.简述你所理解的计算机图形学的应用领域。
答:略。
(参考:教材P4~P5)习题21.什么是图像的分辨率?答:在水平和垂直方向上每单位长度所包含的像素点的数目。
2.在CMY 坐标系里找出与RGB 坐标系的颜色(0.2,1,0.5)相同的坐标。
答:1-0.2=0.8,1-1=0, 1-0.5=0.5 坐标为(0.8, 0, 0.5)3.在RGB 坐标系里找出与CMY 坐标系的颜色(0.15,0.75,0)相同的坐标。
答:1-0.15=0.85, 1-0.75=0.25, 1-0=1 坐标为(0.85, 0.25, 1)4.如果使用每种基色占2比特的直接编码方式表示RGB 颜色的值,每一像素有多少种可能的颜色?答:64222222=⨯⨯5.如果使用每种基色占10比特的直接编码方式表示RGB 颜色的值,每一像素有多少种可能的颜色?答:824107374110242223101010==⨯⨯6.如果每个像素的红色和蓝色都用5比特表示,绿色用6比特表示,一共用16比特表示,总共可以表示多少种颜色?答:65536222655=⨯⨯7.解释水平回扫、垂直回扫的概念。
答:水平回扫:电子束从CRT 屏幕右边缘回到屏幕左边缘的动作。
垂直回扫:电子束到达每次刷新周期末尾,从CRT 屏幕右下角回到屏幕左上角的动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
几何图形流水线:共12题,其中第1-9题每题10分,第10题不计分,第11、12题每题5分,总分100分1.图形流水线总体上可分为两段,它们的名称分别是什么?答:图形流水线总体上可分为“几何图形流水线”和“像素图形流水线”两段,分别用于生成、处理几何图形与像素图形。
(注:两段流水线的分隔点在“透视投影”这一步骤,投影后,三维几何图形转换为二维几何图形,几何图形处理结束,像素图形处理开始)2.简述几何图形与像素图形的区别、联系。
答:(1)几何图形可以是三维的,也可以是二维的,这种图形是连续的、理想的图形,点(Point)无穷小,无尺寸、形状概念,直线无宽度概念,平面无厚度概念,直线、平面均由无穷不可数点集构成。
在图形系统中描述几何图形时,往往采用能够唯一确定几何图形的参数。
例如,用直线段的2个端点描述直线段,用多边形的顶点序列描述多边形等。
(2)像素图形一般使用二维结构,这种图形是离散的、实际的图形,像素(Pixel)有尺寸、形状的概念,并不是无穷小的点,由像素构成的直线段也有宽度概念,直线段、多边形均由有限的像素构成。
在图形系统中描述像素图形时,必须使用规则的像素阵列描述图形的整体信息,而不是其关键参数。
例如,描述直线段时必须给出该直线段经过的所有像素,描述多边形时必须给出多边形覆盖的所有像素。
由于像素图形的基本组成单位与图像一致,都是像素,因此,在不引起混淆的情况下,不特定区分这两种术语。
(3)几何图形可对三维场景与其二维投影作简洁的描述,数据量相对较小,能降低系统管理虚拟场景复杂度,但由于几何图形是连续、理想的,因此它不能用于最终显示。
像素图形可对最终的显示内容作精确的描述,并且,只有像素图形才能最终用于显示,但像素图形的数据量相对庞大,因此一般仅在图形系统作透视投影、形成二维几何图形后,才对其实施像素化,从而避免庞大的处理量。
3.简述几何图形流水线中的必要步骤。
答:(1)布置虚拟的三维场景(Object Placement ;即局部坐标系至世界坐标系的转换)(2)放置摄像机(Camera Placement ; 指定虚拟摄像机外部参数,即世界坐标系至视景坐标系的转换) (3)放置光源(Light Placement )(4)透视投影(Perspective Projection ; 指定虚拟摄像机内部参数,将三维场景投影至二维成像平面)(5)图形像素化(Rasterization ; 采样二维几何图形,使其转换为二维像素图形)4. 完成Object Placement 与Camera Placement 分别对应何种坐标系变换? 答:Object Placement 对应局部坐标系(Local Coordinate )至世界坐标系(World Coordinate )的转换;Camera Placement 对应世界坐标系至视景坐标系(Viewing Coordinate )的转换。
5. 根据各小题对坐标系变换的要求,计算相应的变换矩阵。
(1) 局部坐标系(Local Coordinate System )的基向量L L X O 、L L Y O 、L L Z O 在世界坐标系(World Coordinate System )下的世界坐标分别为[]01-、[]001、[]10,局部坐标系的原点的世界坐标为[]713,则由局部坐标系转换到世界坐标系的矩阵应是怎样的?答:1)局部坐标系是转换前坐标系,世界坐标系是转换后坐标系,因此,用世界坐标描述的局部坐标系基向量应作为转换矩阵的列向量(旧为列,新为行); 2)需要使用齐次坐标变换(4*4矩阵),因为存在平移变换; 3)平移量位于矩阵第4列,应取局部坐标系原点的世界坐标;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-10710010013010 (2) 视景(观察)坐标系(Viewing Coordinate System )的基向量V V X O 、V V Y O 、V V Z O 在世界坐标系下的世界坐标分别为[]001、[]22220、[]22220-,视景坐标系原点(光心)的世界坐标为[]10,则由世界坐标系转换到视景坐标系的矩阵是怎样的?答:1)世界坐标系为转换前坐标系,视景坐标系为转换后坐标系,因此用世界坐标描述的视景坐标系基向量应作为转换矩阵的行向量;旋转子矩阵如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-2222022220001 2)平移量应使用世界坐标系的原点在视景坐标,并取相反数; 平移量计算如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--2222010022220222200013)需使用齐次坐标系;最终的变换矩阵如下:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---10222222022222200001(3) 第(2)小题中条件不变,由视景坐标系转换到世界坐标系的矩阵是怎样的?答:1)对第(2)小题所得矩阵,将左上角3*3的旋转子矩阵转置即得到此子矩阵的逆矩阵;2)平移量应使用视景坐标系原点的世界坐标; 3)最终的变换矩阵如下:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1012222002222000016. 计算一个3*3的齐次矩阵(需解释计算过程),在二维场景中完成如下图所示的几何变换。
答:1)提示:先观察其中有哪些变换,再考虑各变换间的顺序,大致的变换顺序如下:图形中心沿X 轴平移至原点、绕原点顺时针旋转90度、沿Y 轴平移; 2)矩阵序列如下:(变换顺序从右至左)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1001020110001010102100017. 对于glulookat 函数,按要求回答下列问题。
(1) 简述glulookat 函数的功能,以及入口参数的含义。
答:1)glulookat 函数用于指定虚拟摄像机的外部参数,即完成摄像机在世界坐标系下的放置,其入口参数由三个三维向量构成。
2)第一个向量(Eye Position )是摄像机光心的世界坐标;3)第二个向量(Center Point )是摄像机观测中心的世界坐标,光心指向观测中心形成的方向即为拍摄方向,也是视景坐标系的-Z 轴方向;Y4)第三个向量(Up Vector )与视景坐标系的X 轴正交,与视景坐标系Y 轴的夹角为锐角,该向量用世界坐标描述,用于指示成像平面内上边界的方向; (2) 如果指定如下调用:);2121,31,31,31,7,2,5(-glulookat则由世界坐标系转换到视景坐标系的4*4齐次矩阵是怎样的?答:1)由Eye Position 与Center 计算Look Vector :[]T731231531--- ,其模为()()()222731231531-+-+-=r ,下文中简化用r 表示;2)视景坐标系Z 轴单位向量为[]Tzy xTZ Z Z r rr=⎥⎦⎤⎢⎣⎡---7312315313)视景坐标系X 轴的单位向量由Z 轴单位向量与Up Vector 求外积得到:[]()()()()[]Tzyx TTTTXXXrr rrr r r r r r k j i r r r =⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--------=----=-⨯⎥⎦⎤⎢⎣⎡---2613226261231215312173121231212102173123153121021731231531注:行列式中i 、j 、k 分别表示世界坐标系三个坐标轴的单位向量。
验算方法:此运算结果应与Z 轴单位向量、Up Vector 都正交,求内积为0即为正确。
(假定运算结果已单位化)4)视景坐标系Y 轴的单位向量由X 、Z 轴单位向量求外积得到:[]Tzy xTTY Y Y rrrr rr kjir rrr r r =------=⎥⎦⎤⎢⎣⎡---⨯⎥⎦⎤⎢⎣⎡---73123153126132262617312315312613226261注:最终运算结果较复杂,未直接给出,重点掌握其中的运算原理,而非运算结果。
(假定运算结果已单位化) 5)最终的变换矩阵如下:[][][]⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---10725725725z yxz yx z yxzy x z yxzyx Z ZZZ ZZ Y Y Y Y Y Y X XXXXX8. 对于gluperspecitve 函数,按要求回答下列问题。
(1) 简述gluperspecitve 函数的功能,以及入口参数的含义。
答:1)gluperspective 函数用于指定虚拟摄像机的内部参数,即在视景坐标系下设置视景体的形状,该函数共有4个入口参数。
2)第2个入口参数是成像平面横向边界长度与纵向边界长度之比,它决定水平视张角与垂直视张角间的比例。
调节此参数时,垂直视张角不变,水平视张角发生相应变化;3)第1个入口参数是垂直视张角,调节此参数,会引起视景体垂直视张角发生变化,为使水平、垂直视张角的比例保持不变,水平视张角同时根据横纵边界长度比发生相应变化;4)第3个入口参数为最近成像距离,如果某图元与光心间的距离小于此阈值,则被裁剪,不能投影成像;5)第4个入口参数为最远成像距离,如果某图元与光心间的距离大于此阈值,则被裁剪,不能投影成像;(2) 如果指定如下调用:);95020260(tive gluperspec则视景坐标系下的透视投影矩阵是怎样的?答:1)垂直视张角与焦距间的关系如下图所示:(此点为补充提示,与题目要求无关,不计分)即221'Htg d θ=2)横纵边界长度比对成像的影响如下图所示:(此点为补充提示,与题目要求无关,不计分)即经透视投影后,任意横纵边界长度比的成像平面内所成之像都会被映射到一个横纵比为1:1的归一化成像平面中,若横纵比大于1,则归一化后,图形横向出现压缩现象,若横纵比小于1,则归一化后,图形横向出现拉伸现象;3)最终的透视投影矩阵如下:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-022000100001000021'Htgθ注:此矩阵中没有旋转、放缩,因为透视投影变换假定是在视景坐标系下完成的。
9. 对于虚拟摄像机参数,按要求回答下列问题。
(1) 虚拟摄像机的外部参数(由glulookat 指定)与内部参数(由gluperspective指定)会相互影响吗?答:虚拟摄像机外部参数是指摄像机的放置,包括光心位置、拍摄方向、成像平面内边界方向等参数;内部参数是指摄像机的内部结构,即视景体的形状,可以归纳为垂直视张角与横纵边界长度比。
摄像机如何放置并不会影响其内部结构,反之亦然。
因此两种参数相互独立,不会相互影响。
(2) 简述视景体的概念。