高速公路汽车防撞系统的安全行车距离研究
高速公路汽车智能防撞系统研究
保持 安全 的车间距 离 .因此 ,设计一个 智能防撞 系统显得 很
当测距雷达 测量 出车辆 与前 车 的距 离达到危 险报警距
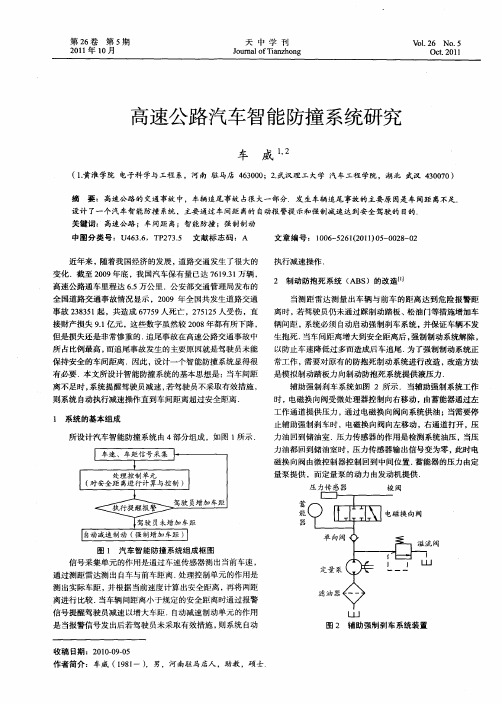
离时, 若驾驶员仍未通过踩制动踏板 、 油门等措施增加车 松 辆 间距 , 系统必须 自动启动强制刹车系统 , 并保证 车辆不发 生抱死 . 当车间距 离增 大到安全 距离后 , 强制制动系统解 除 , 以防止 车速 降低过 多而造成后 车追 尾. 为了强制制动系统正 常工作 ,需要 对原有的防抱死制动系统进行改造 , 改造方法
设 计 了一 个 汽 车 智 能 防 撞 系统 ,主 要 通 过 车 间 距 离的 自动 报 警 提 示 和 强 制 减 速 达 到 安 全 驾 驶 的 目的.
关键词: 高速公路 ;车 间距 离;智能防撞 ;强制制动 中图分类 号:U4 36 P 7 . 文献标 志码 :A 6 .,T 2 35 文章编 号 :10 — 2 1 0 1 0 — 0 8 0 0 6 5 6 ( 1) 5 0 2 — 2 2 执行减 速操作 .
测出实际车距 , 并根据 当前 速度计算 出安全距离 , 再将两距 离进行 比较 . 当车辆间距离小于规定的安全距离时通过报警
信号提醒驾驶员减速 以增大车距 . 自动减速制动单元的作用 是当报警 信号发出后若驾驶员未采取有效措施 , 则系统 自动
LU
图 2 辅助 强制刹车系统装 置
高速公路车辆防追尾碰撞系统的设计与控制研究

高速公路车辆防追尾碰撞系统的设计与控制研究尹小琴;朱喜行;张盼盼【摘要】针对汽车追尾碰撞事故频发和事故中驾乘人员头颈部易受损伤等问题,利用激光雷达测距和机电控制相结合的技术,提出了一种车辆防追尾碰撞系统,对高位制动灯和主动式头枕进行控制。
首先利用激光雷达和本车状态信息对行车环境进行预测;接着对后车分液压和气压两种制动形式进行行车安全车距的分析,推导出临界安全车距的计算公式;最后通过AT89C51单片机系统预设的程序,将实际行车间距与临界安全车距进行比较,并据此控制高位制动灯的开闭和主动式头枕控制系统的执行。
所提出的方法有较好的工程实用性。
%Aiming at the problem of frequent occurrence of rear-end collision and drivers' vulnerability to head and neck injuries in rear-end collision, a rear-end collision avoidance system is proposed to control high-mounted braking light and active head restraint by adopting a technology combining laser radar ranging and electro-mechanical control. Firstly the driving environment is predicted by using laser radar and the state information of own vehicle;Then the safe driving distance is analyzed for both hydraulic and pneumatic brakes of following vehicle with the formula of critical safe driving distance derived;Finally with the preset program in AT89C51 MCU system, the real inter-vehicle distance is compare with critical safe driving distance, and the outcome is used as a judgment to control the on-off of high-mounted braking light and the actuation of active head restraint. The technique proposed has a good engineering practicality.【期刊名称】《汽车工程》【年(卷),期】2014(000)009【总页数】6页(P1080-1084,1116)【关键词】追尾碰撞;设计;控制;激光雷达;安全车距【作者】尹小琴;朱喜行;张盼盼【作者单位】江苏大学智能机械及机器人研究所,镇江 212013;江苏大学智能机械及机器人研究所,镇江 212013;江苏大学智能机械及机器人研究所,镇江212013【正文语种】中文前言在追尾事故中,被追尾车辆驾乘人员的头颈部挥鞭伤是一种极其常见的伤害,其主要原因在于:追尾事故中被追尾车辆采取主动避撞措施的可能性很小[1-2]。
高速公路汽车防撞系统的安全行车距离研究
I行r对算, l别L行制 。 传I距、 … 测测 离}: I 熊对—预)鲶 l (感I测L 、 通车 (与=… 距定来速J … 过器安的《 仪速通控I 离)进计 车、全度报 分 过 r 进 相I 速 等 对— 1 J ~
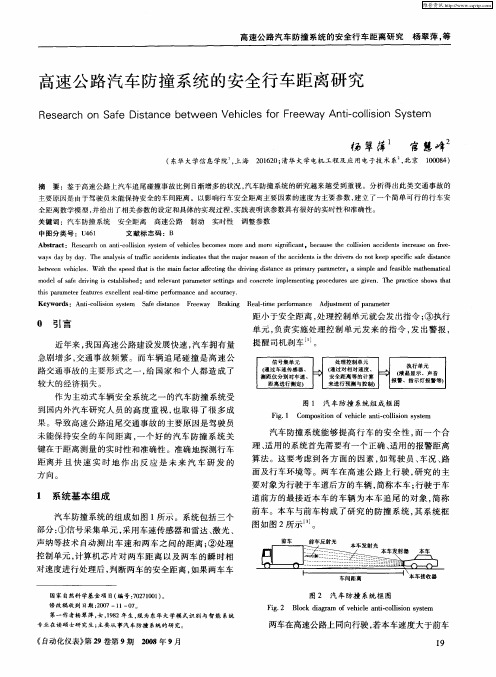
汽车 防撞 系统能 够提高 行车 的安全 性 , 而一 个合
mo e fs ed vn se tbih d;a d r lv n a a trstig n o cee i lme ig p o e ue r ie d lo a r ig i sa ls e f i n ee a tp r mee et sa d c n r t mpe nt rc d rs ae gv n.Th r cie s ws ta n n e p a tc ho h t t i p r mee e t rse c le tra—i efr n e a d a c rc . hs aa trfau e x el n e lt me p r ma c n c u a y o
w y a yd y h n lss frfcacd nsidc ts ht emao ao fh ciet i ted vr d o k e p cf aeds n e a sdyb a .T eaayi o a cie t n iae a t jr e sno eacd ns s h r es ont e ps eicsf ia c tf i t h r t i i t
主要原 因是 由于驾 驶员 未能保 持安 全 的车间距 离 。以影 响行 车安全 距离 主要 因素 的速度 为 主要参 数 , 立 了一 个 简单 可行 的行 车 安 建 全距离 数学模 型 , 给 出 了相 关参 数的设 定和 具体 的实现 过程 , 并 实践 表 明该参 数具 有很好 的实 时性 和准 确性 。
高速车辆间距控制系统的设计
高速车辆间距控制系统的设计
设计高速车辆间距控制系统包括
系统概述:
高速车辆间距控制系统旨在确保车辆之间的安全距离,减少交通事故的风险。
系统使用车载传感器和控制单元实时监测车辆间的距离和速度,并根据预设的安全距离要求进行控制。
传感器选择:
选择适用于高速车辆间距控制的传感器,如雷达、激光传感器或摄像头。
传感器应具备高精度、广泛的探测范围和快速响应的能力。
数据采集:
传感器实时采集车辆间的距离和速度数据。
数据包括前车和本车的位置、速度和加速度等信息。
控制算法:
设计一个高效的控制算法,用于计算并控制车辆之间的安全距离。
算法应考虑车辆的动态特性和环境条件,并在保持安全的前提下优化车辆的跟随性能。
控制单元:
控制单元接收传感器采集的数据,并根据控制算法计算出安全距离。
控制单元通过车辆的刹车和加速系统控制车辆的速度,以保持与
前车的安全距离。
警告系统:
设计一个警告系统,用于提醒驾驶员注意保持安全距离。
警告系统可以通过声音、光线或振动等方式发出警告信号。
故障检测和容错机制:
系统应具备故障检测和容错机制,以确保在传感器或控制单元发生故障时系统的可靠性和安全性。
可以采用冗余设计或监测算法来检测故障并采取相应的措施,如停车或切换到备用系统。
集成和测试:
将传感器、控制单元和警告系统进行集成,并进行系统级测试。
确保系统在不同环境和情况下的稳定性和可靠性。
实施和部署:
安装高速车辆间距控制系统到目标车辆中,并确保系统与车辆的其他系统兼容。
高速公路长大纵坡载重车最小安全行车间距研究
高速公路长大纵坡载重车最小安全行车间距研究高速公路在交通运输中具有高速、便捷、高效的显著特性,为我国国民经济的发展贡献了巨大力量。
随着高速公路通车里程的逐年增加,公路货运能力和货运量也在逐步提升,但以载重车为主的货运车辆在高速公路长大纵坡路段事故率居高不下,对这类交通事故进行统计分析,发现载重车追尾碰撞事故率及事故危害性最高,究其原因主要是由于载重车行车间距不足。
因此,有必要对高速公路长大纵坡载重车最小安全行车间距进行深入研究,从而保障载重车行驶安全,提升高速公路的安全服务质量。
首先,论文在参照相关规范的基础上,通过考虑载重车辆的实际跟驰行驶行为,分别对高速公路长大上坡及长大下坡做出有效界定;根据高速公路载重车车型的调查结果,确定出载重车的代表车型。
其次,通过分析载重车在爬坡或下坡行驶时车身总重对制动产生的不同影响,并结合空气和车轮滚动两方面的环境阻力,确定出“坡度—环境”加速度a<sub>s-c</sub>。
从驾驶员自身、车辆、道路条件及交通环境四个方面分析高速公路长大纵坡最小安全行车间距的影响因素。
然后,在考虑纵坡影响特点、保证模型可靠和满足驾驶员特性的前提下,提出了满足不同制动工况的载重车最小安全车距计算模型。
对模型中驾驶员反应时间t<sub>f</sub>、最大制动加速度a<sub>t</sub>和加速度a<sub>s-c</sub>等相关参数进行标定,从而计算得出不同条件下的载重车最小安全行车间距值。
通过载重车仿真平台TruckSim2016对间距进行仿真验证,验证结果表明本文计算得出的最小安全行车间距值能满足载重车安全行驶的要求。
最后,基于论文研究结论,分别从载重车的爬坡和下坡行驶状态提出安全处置措施,对预防追尾事故的发生和减少人员财产损失具有重要的意义。
2024年高速公路上安全距离的估算(三篇)

2024年高速公路上安全距离的估算大家知道,汽车在高速公路上行驶时,通常车速都比较高,这就要求一方面上路车辆车况要良好,另一方面驾驶员要熟悉所驾车辆的性能,掌握高速公路上行车的要点,了解各种不利自然环境因素对行车安全的影响,同时驾驶时要集中注意力。
为有效预防高速公路上的交通事故的发生,行车时,控制好车速,确保跟车行驶时的安全距离关键。
所谓“安全距离”,就是指驾驶自车尾随前车行驶时与前车之间所应保持的最小距离。
有了这个“安全距离”,车主们一方面可以有较大的视野,能较早发现险情,另一方面一旦真的遇上情况,如前车减速、停车或发生事故,也可以有较长的时间做出反应以采取应变措施。
下面介绍便于司机们掌握的控制行车“安全距离”的简易方法。
1.在正常天气下,前后两车相随行驶其间的“安全距离”应为:大型车用其行车时速值减去20、小型车用其行车时速值除以2,所得的数值即为跟车行驶时最小安全间距的米数。
例如,后车的时速为90公里时,若是大型车,则跟车行驶的最小“安全距离”为70米;若是小型车,则最小“安全距离”就应是45米。
2.在判断实际的跟车间距时(时速仍为90公里),可以先注意前车通过的固定点(如路旁的标识杆、里程碑及桥梁等),然后就开始默数,驾驶大型车应数3秒钟,而驾驶小型车时就数2秒钟。
如果还未数完应数的时间,自车就通过了该固定点,则表示目前的跟车间距不足,应该立即减速加大跟车间距以保持“安全距离”。
需要注意,如遇浓雾、浓烟、强风、大雨、冰雪、夜间行车或其它特殊情况,车主除应按规定降低车速外,还要将跟车间距酌量加大,以确保安全。
总之,在高速公路上行车,一定要注意保持“安全距离”。
2024年高速公路上安全距离的估算(二)摘要本文旨在对____年高速公路上的安全距离进行估算。
首先,我们将解释什么是安全距离,以及为什么它对驾驶安全至关重要。
然后,我们将介绍目前的高速公路安全距离标准,并讨论可能在____年出现的变化。
汽车安全行驶间距预警系统研究
式中:a 为汽车最大制动减速度 ,u 为轮胎与路面 问附 着系数 g 为重力加速度。为了简化研究,一般取
C M U I T N A D R I T N L O . .0( 5 2 o .第1 下 总第1 5l . 5 . O M N A I S TN A D AI H F F O12 8 O1 》 o 8 C O S Z O 2 A N 1 0 N 8)  ̄ 1 《 交通标准化 8; I j 5
般 为 O2 ~ s s 1 ,称 为 制动 系 统协 调 时 间 。汽 车 又经 过 时 间 2
一 才完全停下来,这段时间称 为持续制动时问。本车制动距 r
离: T, ( , 时间内速度取 V)
S=V T +T ) 一 ( 1 ,+
za
式中: S为制动距离 , 为自车速度, T 为驾驶员的反应 时间, T 为制动系统协调 时间 ,a 自车减速度。 , 为
、●● r
、 ■■,
1●■ r
、■● , -
罗文华
( 盐城纺织职业技术学院,江苏 盐城 240 ) 205
摘
要 :高速公路汽车安全行驶 间距预警系统具有技术先进、性能可靠、性
价 比高等特点,具有一定 的实用价值 。 关健词: 交通流量; 交通密度; 制动距离; 激光雷达
作者: 罗文华
a h【h c t p ro ma c rto,S i s e y usf . nd i os e f r n e a i g O t v r eu1 i
K y wo d :tafc f x;ta c d n i ;b a ig dsa c ;lsr rd r e rs rfi l u rf e s i y t rkn i n e ae a a t
高速公路上汽车行驶的安全距离研究
资料显 示 ,在高 速公路所 发生 的交 通事 故 ( ) 制动 时 问 t行驶 距 离 s 2 中 ,以汽 车追 尾碰撞 事故最 多.原 因是 驾驶 员 t 由两 个 时段 组 成 ,t 为 动 器 间 隙 消 除
原来在普通公路上行驶所建立起来 的行车间距 时间;t 则为减速度增 长的时间. 一般液压 t 2 t 分 别 为 00 S和 02 ;气 动制 :和 p r 2 .3 .S 习惯不适应在高速公路上高速行驶 的新情况. 制 动时 t
电路放大的倍数不能超 过 10倍. 在 实验 中我 0
P =12 8 (4 . ,13 1 2 4 . 12 6 4 . )
即一 次 函数 的 斜 截 式 ,斜 率 为 0 6 5 ,截 距 .9 7
( ) 驾驶 员 的 反应 时 间 ( 中 的 t) 时 9k h的速度 行驶 ,制 动距 离 要 10 1 图 0m/ 5 m,还 要 段 内行驶距 离 s = t 36 ( , v /. m) , ( ) 加反 应距 离 s 1 . ( 转第4 下 6页)
制动距离与 附着 系数和行驶速度 的关 系
24P ( 5 ‘ m) ( 的单 位 为 k / t , m h以上 同 )
() 5
两者相差驾驶员从看到信号 ,经过信息传递和
根 据 4式 和 5式 即可 计算 行 车 的安全 距离 判断到作 出行 动反应这段时间 内所经过 的距 和制动 距离 的大 小. 下表 是 汽车制 动 距离 与 附 离 ,即图 中的 s 这 段 时问对不 同驾 驶员 有所 着 系数 及汽 车速 度 的关 系.从 表 中对 各 车速下 差 别 ,一般在 03 ~ .s 间. .s 07 之 在 不 同路 面上 的制动距 离 可 以使人 们 有一 个基 2 各 时段汽 车行驶 距离 的计 算 本 的 数 量 的 概 念. 例 如 ,在 冰 雪 路 面 , 以
行进中车辆防追尾碰撞的临界安全车距研究
行进中车辆防追尾碰撞的临界安全车距研究
戴秋艳
【期刊名称】《淮阴工学院学报》
【年(卷),期】2009(018)001
【摘要】日益增多的交通事故已成为严重的社会问题,降低交通事故的损失和伤害有待解决.车辆在行驶中,前车采取减速行驶操作或出现障碍物等,为了防止发生追尾,后车驾驶员会做出相应的驾驶行为的改变.为了提高车辆在高速行驶状态下的主动安全性能,研究了处于追尾行驶状态的前乍与后乍的运动学特征.针对前车的不同运动状态分别推导出跟车距离的临界安全车距的计算公式,并以此为依据进行了有关论述.
【总页数】5页(P18-22)
【作者】戴秋艳
【作者单位】淮阴工学院计算科学系,江苏,淮安,223003
【正文语种】中文
【中图分类】O23
【相关文献】
1.基于 IEEE 802.11 p/1609的车辆防追尾碰撞终端系统设计与实现∗ [J], 徐淑雨;卢红洋;成健
2.高速公路车辆防追尾碰撞系统的设计与控制研究 [J], 尹小琴;朱喜行;张盼盼
3.一种车辆防追尾碰撞安全系统设计 [J], 李智安
4.行进中车辆临界安全车距的探讨 [J], 钟勇;姚剑峰
5.车辆防追尾动态安全车距监控系统研究 [J], 陈冉;江焰林;张蒙恩;王雪琪;韩锐因版权原因,仅展示原文概要,查看原文内容请购买。
汽车防追尾预警系统安全距离模型研究
后车车 L N 总 线 发 送 给 主 控 单 元 子 系 统 。 主 控 单 元 车道 上,同向行驶前后两车间的距离 ( 头 与前车车尾间的距离 ),保持既不发生追尾 系 统根据 采集 的数据对当前的行车安全状态
行判 断处理,并给出处理结果 ,然后把处理 事 故,又 不降低 道路通行能力的适当距离 。在 4 . 1自 车制动距 离计算 的结果通 过 C N 总线接 口发送给 显示报警 我国的高速公路的管理 中,一般根据工程技术 A
在实 际运行过程 中,如 果跟 随车辆的车间距 过 X + 2 5时 ,行驶状态 显示为 “ 正常驾驶 ”,这
车速传感器测得 自车速度信号 ,送入信息采 小 ,则容 易发生追尾碰撞 事故;反之若车间距 时候 没有与前车相撞的危险 。 单 元 中进 行处理计 算,计算 出实时速 度值 : 过 大,则会影响道路的通行能力,因此必须将 ( 2 )提醒报警状态 : 当车 间距 离的 d满 —X2 + 2 5 > d > XI —x2 + 5 ,行 驶状 态 显 示 向角 、制动信 息、加 速信息及路面情况 以开 车辆 间的距离控制在一定范围 内,在保证安全 足 :xl
汽车 防追尾预警系统 的工作原理
系 统利 用安 装在 汽车 前保 险杠 上 的测 距
系统 利用 安全 距离 模 型进 行报 警 判 断, 进而给 出当前车 的状态 :分为正常 驾驶 、提 醒 报警、危险报警三种状态 。为 驾驶 员安全 驾驶
提供参考 。
即在 同一条车道上 ,同向行驶 的车辆 以相近
量 的形 式输入 到信息采集单元 ,信息采集单
子 系统把 所有 传感器的信息进行处理后通过
的情 况下尽 量提 高道路的通过能力,从而引 出 为 “ 提醒报警 ”,驾驶员应该适当减速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
performance and
accuracy.
Safe distance
Braking
0
引言
近年来,我国高速公路建设发展快速,汽车拥有量
急剧增多,交通事故频繁。而车辆追尾碰撞是高速公 路交通事故的主要形式之一,给国家和个人都造成了 较大的经济损失。 作为主动式车辆安全系统之一的汽车防撞系统受 到国内外汽车研究人员的高度重视,也取得了很多成 果。导致高速公路追尾交通事故的主要原因是驾驶员 未能保持安全的车间距离,一个好的汽车防撞系统关 键在于距离测量的实时性和准确性。准确地探测行车 距离并且快速实时地作出反应是未来汽车研发的 方向。
V01.29 No.9
③车速除以10再平方。比如当汽车车速为
80
km/h时,安全行车距离为64
m。
以上三种方法都只能是粗略地估算,并无法准确 地计算汽车的安全行车距离。综合分析影响安全行车 距离的各种因素,并按照决定安全距离的反应距离和 停车距离两个部分,得到如下简单可行的算法H】。
20
PROCESS
major
reflgon
of the accidents is the drivers do
keep specific safe distance
between vehicles.With the speed that
model of safe driving is
is
the main factor affecting the driving distance髓primary parameter.a simple
2系统模型的建立
所谓安全行车距离就是指在同一条车道上,同向 行驶前后两车间的距离(后车车头与前车车尾间的距 离),保持既不发生追尾事故,又不降低道路通行能力 的适当距离。 安全行车距离主要取决于制动停车距离。制动停 车距离又包括反应距离和制动距离。所谓反应距离, 也就是当前车辆行驶状态发生变化时,驾驶员从看到 情况变化到用脚踩刹车,直到刹车系统产生制动力并 开始制动时,汽车在该时间内行驶的距离;所谓制动距 离,是指车辆在制动力作用下汽车从运动状态到停止 状态时的距离。 影响汽车安全行车距离的主要因素有车辆的行驶 速度、驾驶员的反应能力、路面状况、天气变化、载重量 的多少及车辆制动系统的结构形式等∞’。而车辆的行 驶速度是其中最关键的因素。《中华人民共和国道路 交通安全法实施条例》第八十条规定,机动车在高速 公路上行驶,车速超过100 krrdh时,应当与同车道前 车保持100 m以上的距离;车速低于100 km/h时,同车 道前车距离可适当缩短,但最小距离不得少于50 如遇雨雾或路面湿滑,应延长行车间距。 以行驶速度这个关键因素,来判断汽车的安全行 车距离一般有以下的三种方法b1: ①由于前后车的行驶速度一般都差不多,而且制 动过程也差不多,因此可用与前车保持2 s的时间的方 法。这种方法比较粗糙。 ②前后汽车间隔的米数和行驶车速的千米数相 同。比如:当汽车车速为50 km/h时,安全行车距离为
l蕊_擞H报譬酝,I
l(通过车速传感嚣、L.一(通过对相对速度、L—hJ I
距离进行测定)
I测距仪分别对车速、广1安全距离等的计算广]。:。::竺≥二:2、I
l l来进行预测与控制)I
,t:乙i;’u胄^
I
I……………"l
1系统基本组成
汽车防撞系统的组成如图1所示。系统包括三个 部分:①信号采集单元,采用车速传感器和雷达、激光、 声纳等技术自动测出车速和两车之间的距离;②处理 控制单元,计算机芯片对两车距离以及两车的瞬时相 对速度进行处理后,判断两车的安全距离,如果两车车
and feasible
mathematical
established;and relevant
parameter
Freeway
settings
and
concrete
implementing
procedures are given.The practice shows that
this parameter features excellent real—time Keywords:Anti-collision system
《基塞耋垫.
。I
车间距离
I。\本车接收嚣
国家自然科学基金项目(鳊号:70271001)。 修改稿收到日期:2007一i1—07。 第一作者杨翠萍,女,1982年生,现为东华大学模式识别与智能系统 专业在读硕士研究生;主要从事汽车防撞系统的研究。
Fig.2
图2汽车防撞系统框图
Block diagram of vehicle anti—collision system
4
m。
系统模型的实现过程
给定一个汽车防撞系统,根据各参数的影响因素和
[4]古维杰.浅谈同车道安全跟车距离确定的依据——高速公路上
防止“追尾”的数据关键[J].广东交通职业技术学院学报, 2005,12(4):38. (5]徐向田.安全距离与行车安全[J].汽车与安全,1999(4):37. [6]胡松柏.如何把握行车安全距离[J].农机安全监理,2002(10):149. [7]应世杰.高速公路汽车防撞预警系统的开发研究[D].长安:长 安大学。2004.
表1不同路面的附着系数
Tab.1 Adhesion
射器,如超声波、微波雷达或激光发射器不断发射信 号,前车的反射信号通过本车接收器接收后送回处理 控制单元进行处理,软件算法将速度传感器实时采集 的当前本车的行车速度口进行运算,给出当前速度下 的安全行车距离d‘,并将d与d‘不断地进行比较,如 果两车车距小于安全距离,处理控制单元就会发出指 令。指令发到执行单元,进行声光报警,提醒司机刹车。
两车在高速公路上同向行驶,若本车速度大于前车
19
《自动化仪表》第29卷第9期2008年9月
万方数据
高速公路汽车防撞系统的安全行车距离研究杨翠萍。等 速度,两车将会不断接近,本车驾驶员稍不留意,就有可 能发生撞车事故。要避免同向行驶的两车相撞,就需要 实时判断两车的相对距离d是否为安全距离,故两车不 发生追尾的条件是:两车之间的实际跟车距离d(m)必 须大于安全行车距离d‘(m)"1,即d>d‘,或记作: d≥d’+以 式中:以为完全间距。 可见问题的关键是求解安全行车距离d+。 (1) ①反应距离d。
摘要:鉴于高速公路上汽车追尾碰撞事故比例日渐增多的状况。汽车防撞系统的研究越来越受到重视。分析得出此类交通事故的 主要原因是由于驾驶员未能保持安全的车间距离。以影响行车安全距离主要因索的速度为主要参数,建立了一个简单可行的行车安 全距离数学模型,并给出了相关参数的设定和具体的实现过程,实践表明该参数具有很好的实时性和准确性。 关键词:汽车防撞系统安全距离高速公路制动实时性调整参数 中图分类号:U461
高速公路汽车防撞系统的安全行车距离研究杨翠萍。等
高速公路汽车防撞系统的安全行车距离研究
Research
on
Safe Distance between Vehicles for Freeway Anti—collision System
饧翠簿1
官簿噜2
(东华大学信息学院1。上海201620;清华大学电机工程及应用电子技术数可 为了安全,驾驶员要根据自己对安全效果的不同 要求来设置调整系数智。如果比较保守,要选择智值 大些。田取值范围为1.05—1.10,通常取1.10。 ⑤安全间距也 两车制动停止时应保持一定的间距d0以保证安 全。d。选择得是否合理,对系统的虚警率有一定的影 响。理想情况最小可以为0,但国内外的资料上一般 为2~5 m,出于安全考虑取为5
Abstract:Research
on
文献标志码:B
anti-collision system of vehicles becomes more and more
significant,because the collision accidents increase
not
on
free—
ways day by day.The analysis of tragic accidents indicates that the
50 m。 m。
d’2叼(优+亩)
。,2
(4)
式中:田为系统调整系数,其范围为1.05—1.10。 经过实践证明,在高速公路上保持通过上式计算 得的与前车之间的距离数据,可以从容地驾车,并取得 了良好的安全效果。
3模型参数的确定
要确定的参数有本车速度口、反应时间t、轮胎与 道路的附着系数叭系统调整系数叩¨1。 ①本车速度口 根据《中华人民共和国道路交通安全法实施条 例》第七十八条规定,高速公路应当标明车道的行驶 速度,最高车速不得超过120 km/h,最低车速不得低
取值范围,设定相应参数:z=1.8 s;r/=1.10;以=5
m。
在行车过程中,根据路面类型的不同,参照表1的数 据来设定轮胎与道路的附着系数妒。行车过程中,汽 车防撞系统通过安装在本车前端的信号采集单元的发
(上接第18页) 用的计费”和“企业信用担保信息化管理系统”。对于 这两种情况,前者传统的处理方式是通过在系统中注 册用户名和密码实现管理(有时也通过计费卡实现), 安全问题上存在隐患,如用户名和密码泄漏或被非法 盗用、用户抵赖等。后者由于对数据保密性要求比较 高,另一方面要求实现用户操作信息的不可否认性。 采用PKI认证与硬件USB Key结合的系统后,有效满 足了以上需求。 随着Internet的高速发展,防护与攻击之间的斗争 也将更加激烈,这就对网络安全技术提出了更高的要 求。可以预见,PKI作为一种安全的基础平台,是开展 信息网络业务、电子商务、网上银行、电子政务等不可
d.=们
(2)
式中:t为反应时间;口为行驶车速。 在相同的反应时间内,车速越快,反应距离越长。 ②制动距离畋 根据有关资料分析,制动距离d,的长短与汽车的 行驶速度、汽车在不同路况行驶时的地面附着系数等 因素有关,其数值一般选用经验公式: (3) 式中:妒为轮胎与道路的附着系数。一般来说附着系 数妒在干燥水泥路面为0.7~1.0;下雨开始时为0.3~ 0.4;潮湿水泥路面为0.4~0.6。 制动停车距离由驾驶员反应距离d。和车辆制动距 离畋组成。但由式(2)一式(3)只能为确定与前车的安 全距离提供理论根据,在实际驾驶运行中,不可能按计 算数值精确地量测到与前车车距。为了取得良好的安 全效果,应在计算出制动停车距离值后,适当比计算的 数据放大5%~10%,以确定为安全行车距离d+: