LSM303C:罗盘模块
基于LSM303AGR的超紧凑高性能电子罗盘模块说明书
AN4825应用笔记基于LSM303AGR的超紧凑高性能电子罗盘模块引言本文档旨在提供ST eCompass六轴惯性传感器模块相关的使用信息和应用提示。
LSM303AGR是系统级封装的3D数字磁力计和3D数字加速度计,具有数字I2C和3线SPI接口标准输出,在组合高分辨率模式下功耗250 µA,在组合低功耗模式下功耗不超过60 µA。
由于磁力计和加速度计均具有超低噪声性能,始终具有低功耗特性,并结合了高传感精度,因此能够为客户提供最佳运动体验。
器件具有超低功耗工作模式,可实现高级节能、智能睡眠唤醒以及恢复睡眠功能。
该器件的磁场动态范围高达±50高斯,其用户可选择的满量程加速度范围为±2g/±4g/±8g/±16g。
可以对LSM303AGR进行配置,使其产生用于磁场检测的中断信号,并自动补偿由较高应用层产生的硬磁偏移。
它可配置为通过检测独立的惯性唤醒/自由落体事件以及通过器件自身的位置生成中断信号。
中断发生器的阈值和时序可由终端用户动态设定。
也可通过可自动编程的睡眠唤醒和恢复睡眠功能提高节能效率。
LSM303AGR集成了32级的先进先出(FIFO)缓冲器,允许用户存储加速度计数据,可减少主机处理器的干预。
LSM303AGR采用纤薄的小型塑料焊盘栅格阵列封装(LGA),可确保在更大的温度范围(-40 °C至+85 °C)内正常工作。
SMD封装的超小尺寸和重量使其成为手持便携式应用的理想选择,如智能手机、物联网(IoT)连接设备,穿戴,以及需要减小封装尺寸和重量的其他应用。
2020年3月DocID028927 Rev 1 [English Rev 1]1/65目录目录1引脚说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93磁力计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.1工作模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.1.1空闲模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.1.2高分辨率模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.1.3低功耗模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.1.4单次测量模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2磁力计低通滤波器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.3读取输出数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.3.1启动序列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.3.2使用状态寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3.3使用数据准备就绪信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3.4使用块数据(BDU)功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3.5理解输出数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16输出数据示例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .163.4磁力计偏移消除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.5磁力计硬磁补偿 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.6中断产生 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.6.1中断引脚配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.6.2事件状态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.6.3阈值中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.7磁力计自检 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214加速度计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.1工作模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.1.1下电模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.1.2高分辨率模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.1.3正常模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.1.4低功耗模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.1.5切换模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.2启动序列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 2/65DocID028927 Rev 1 [English Rev 1]目录4.2.1读取加速度数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26使用状态寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26使用数据就绪(DRY)信号. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26使用块数据更新(block data update,BDU)功能. . . . . . . . . . . . . . . . . . . . . . . .274.2.2理解加速度数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27数据对齐. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27大小端序选择 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27加速度数据示例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27 4.3高通滤波器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3.1滤波器配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29正常模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29参考模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30自动复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30 4.4中断产生 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.4.1中断引脚配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 4.5惯性中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.5.1持续时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.5.2阈值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.5.3自由落体和唤醒中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34惯性唤醒. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35不使用高通滤波器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36使用高通滤波器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .374.5.4自由落体检测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 4.66D/4D方向探测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.6.16D方向探测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.6.24D方向 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 4.7单击和双击识别 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.7.1单击 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.7.2双击 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.7.3寄存器说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44CLICK_CFG_A (38h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44CLICK_SRC_A (39h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45CLICK_THS_A (3Ah) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45TIME_LIMIT_A (3Bh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46TIME_LATENCY_A (3Ch) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46TIME_WINDOW_A (3Dh). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46CTRL_REG3_A [中断CTRL寄存器] (22h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .474.7.4示例1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48调整TAP_TimeLimit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48DocID028927 Rev 1 [English Rev 1]3/65目录调整TAP_Latency. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49调整TAP_Window. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .504.8先进先出(FIFO)缓冲器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.8.1FIFO说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.8.2FIFO寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52控制寄存器5(0x24). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52FIFO控制寄存器(0x2E) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53FIFO状态寄存器(0x2F) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .544.8.3FIFO模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Bypass模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55FIFO模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55Stream模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56Stream-FIFO模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .594.8.4水位标志 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.8.5从FIFO中读取数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.9温度传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.10加速度计自检 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 5版本历史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644/65DocID028927 Rev 1 [English Rev 1]表格索引表格索引表 1.引脚说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8表 2.寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9表 3.工作模式的电流消耗. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12表 4.工作模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12表 5.单次测量模式(HR和LP模式)下的最大ODR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13表 6.低通滤波器、相对带宽和噪声. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14表 7.CFG_REG_C_M寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19表 8.INT_CTRL_REG_M寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19表 9.工作模式选择 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23表 10.数据速率配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23表 11.工作模式的电流消耗. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24表 12.操作模式转换的导通时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25表 13.输出数据寄存器内容与加速度对比(FS = 2 g) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28表 14.高通滤波器模式配置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29表 15.低功耗模式 - 高通滤波器截止频率[Hz] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29表 16.参考模式LSB值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30表 17.CTRL_REG3_A寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31表 18.CTRL_REG3说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31表 19.CTRL_REG6寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31表 20.CTRL_REG6寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31表 21.中断模式配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32表 22.正常模式下的持续时间LSB值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33表 23.阈值LSB值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33表 24.6D位置中的INT1_SRC_A寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41表 25.CLICK_CFG_A寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44表 26.CLICK_CFG_A说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44表 27.真值表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44表 28.CLICK_SRC_A寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45表 29.CLICK_SRC_A说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45表 30.CLICK_THS_A寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45表 31.CLICK_THS_A说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45表 32.TIME_LIMIT_A寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46表 33.TIME_LIMIT_A寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46表 34.TIME_LATENCY_A寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46表 35.TIME_LATENCY_A说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46表 36.TIME_WINDOW_A寄存器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46表 37.TIME_LATENCY_A说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46表 38.CTRL_REG3_A寄存器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47表 39.CTRL_REG3_A说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47表 40.FIFO缓冲区填满示例(存储第51个采样集) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32表 41.FIFO溢出示例(存储第52个采样集同时丢弃第1个采样) . . . . . . . . . . . . . . . . . . . . . . . . . 52表 42.CTRL_REG5_A中的FIFO使能位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52表 43.FIFO_CTRL_REG_A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53表 44.FIFO_SRC_REG_A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54表 45.FIFO_SRC_REG_A特性(假定FTH[4:0] = 15) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54表 46.CTRL_REG3_A (0x22). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54表 47.文档版本历史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64表 48.中文文档版本历史. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64DocID028927 Rev 1 [English Rev 1]5/65图片目录图片目录图 1.引脚连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7图 2.中断功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20图 3.磁力计自检步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22图 4.数据准备就绪信号. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26图 5.高通滤波器连接框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28图 6.REFERENCE/DATACAPTURE_A读取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29图 7.参考模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30图 8.自动复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30图 9.中断信号和中断引脚. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32图 10.自由落体、唤醒中断发生器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34图 11.自由落体和唤醒配置 - 高和低 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35图 12.惯性唤醒中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35图13.自由落体中断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38图14.ZH、ZL、YH、YL、XH和XL特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39图15.6D运动与6D位置对比. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40图16.6D识别位置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40图17.使用非锁存中断的单击事件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42图18.单击和双击识别. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43图19.双击识别. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43图20.短TimeLimit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48图21.长TimeLimit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48图22.短延迟. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49图23.长延迟. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49图24.短窗口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50图25.长窗口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50图26.FIFO_EN连接框图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53图27.FIFO模式特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56图28.Stream模式快速读取特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57图29.Stream模式慢速读取特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57图30.Stream模式慢速读取(放大图). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58图31.Stream-FIFO模式:中断未锁存 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59图32.Stream-FIFO模式:中断已锁存 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60图33.水位标志特性 - FTH[4:0] = 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60图34.FIFO读取 - FTH[4:0] = 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61图35.加速度计自检步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 6/65DocID028927 Rev 1 [English Rev 1]引脚说明1 引脚说明DocID028927 Rev 1 [English Rev 1]7/65引脚说明8/65DocID028927 Rev 1 [English Rev 1]表1. 引脚说明引脚#名称功能引脚状态1SCLSPC I 2C 串行时钟(serial clock ,SCL )SPI 串口时钟(serial port clock ,SPC )默认值:无上拉的输入2CS_XL 加速度计:SPI 使能I 2C/SPI 模式选择1:SPI 空闲模式/ I 2C 通信使能;0:SPI 通信模式/ I 2C 禁用默认值:无上拉的输入3CS_MAG 磁力计:SPI 使能I 2C/SPI 模式选择1:SPI 空闲模式/ I 2C 通信使能;0:SPI 通信模式/ I 2C 禁用默认值:无上拉的输入4SDA SDI SDO I 2C 串行数据(serial data ,SDA )SPI 串行数据输入(serial data input ,SDI )3线接口串行数据输出(serial data output ,SDO )默认值:无上拉的输入5c1电容连接(C1 = 220 nF )6GND 0 V 电源7INT_MAG/DRDY 磁力计中断/数据准备就绪信号高阻抗8GND 0 V 电源9Vdd 电源10Vdd_IO I/O 引脚的供电11INT_2_XL 加速度计中断2输出强制接地12INT_1_XL 加速度计中断1输出强制接地DocID028927 Rev 1 [English Rev 1] 9/652 寄存器表2. 寄存器寄存器名地址位 7位 6位 5位 4位 3位 2位 1位 0STATUS_REG_AUX_A07h-TOR---TDA--RESERVED08h-0BhOUT_TEMP_L_A0Ch D7 D6D5D4D3D2D1D0OUT_TEMP_H_A0Dh D15 D14D13D12D11INT_COUNTER_REG_A0Eh IC7IC6IC5IC4IC3IC2IC1IC0WHO_AM_I_A0Fh00110011TEMP_CFG_REG_A1Fh TEMP_EN1TEMP_EN0000000CTRL_REG1_A20h ODR3ODR2ODR1ODR0LPen Zen Yen XenCTRL_REG2_A21h HPM1HPM0HPCF2HPCF1FDS HPCLICK HPIS2HPIS1CTRL_REG3_A22h I1_CLICK I1_AOI1I1_AOI2I1_DRDY1I1_DRDY2I1_WTM I1_OVERRUN-CTRL_REG4_A23h BDU BLE FS1FS0HR ST1ST0SPI_ENABLECTRL_REG5_A24h BOOT FIFO_EN--LIR_INT1D4D_INT1LIR_INT2D4D_INT2CTRL_REG6_A25h I2_CLICKen I2_INT1I2_INT2BOOT_I2P2_ACT-H_LACTIVE-REFERENCE/DATACAPTURE_A26h Ref7Ref6Ref5Ref4Ref3Ref2Ref1Ref0STATUS_REG_A27h ZYXOR ZOR YOR XOR ZYXDA ZDA YDA XDAOUT_X_L_A28h XD7XD6XD5XD4XD3XD2XD1XD0OUT_X_H_A29h XD15 XD14XD13XD12XD11XD10XD9XD8OUT_Y_L_A2Ah YD7YD6YD5YD4YD3YD2YD1YD0OUT_Y_H_A2Bh YD15YD14YD13YD12YD11YD10YD9YD8OUT_Z_L_A2Ch ZD7ZD6ZD5ZD4ZD3ZD2ZD1ZD0OUT_Z_H_A2Dh ZD15 ZD14ZD13ZD12ZD11ZD10ZD9ZD8FIFO_CTRL_REG_A2E FM1FM0TR FTH4FTH3FTH2FTH1FTH0寄存器DocID028927 Rev 1 [English Rev 1] 10/65FIFO_SRC_REG_A2F WTM OVRN_FIFO空FSS4FSS3FSS2FSS1FSS0INT1_CFG_A30h AOI6DZHIE/ZUPEZLIE/ZDOWNEYHIE/YUPEYLIE/YDOWNEXHIE/XUPEXLIE/XDOWNEINT1_SRC_A31h0IA ZH ZL YH YL XH XLINT1_THS_A32h0THS6THS5THS4THS3THS2THS1THS0INT1_DURATION_A33h0D6D5D4D3D2D1D0INT2_CFG_A34h AOI6D ZHIE ZLIE YHIE YLIE XHIE XLIEINT2_SRC_A35h0IA ZH ZL YH YL XH XLINT2_THS_A36h0THS6THS5THS4THS3THS2THS1THS0INT2_DURATION_A37h0D6D5D4D3D2D1D0CLICK_CFG_A38h--ZD ZS YD YS XD XSCLICK_SRC_A39h-IA Dclick Sclick符号Z Y XCLICK_THS_A3Ah-Ths6Ths5Ths4Ths3Ths2Ths1Ths0TIME_LIMIT_A3Bh-TLI6TLI5TLI4TLI3TLI2TLI1TLI0TIME_LATENCY_A3Ch TLA7TLA6TLA5TLA4TLA3TLA2TLA1TLA0TIME_WINDOW_A3Dh TW7TW6TW5TW4TW3TW2TW1TW0Act_THS_A3Eh-Acth6Acth5Acth4Acth3Acth2Acth1Acth0Act_DUR_A3Fh ActD7ActD6ActD5ActD4ActD3ActD2ActD1ActD0 RESERVED40h-44hOFFSET_X_REG_L_M45h Offset_X_7 Offset_X_6Offset_X_5Offset_X_4Offset_X_3Offset_X_2Offset_X_1Offset_X_0 OFFSET_X_REG_H_M46h Offset_X_15Offset_X_14Offset_X_13Offset_X_12Offset_X_11Offset_X_10Offset_X_9Offset_X_8 OFFSET_Y_REG_L_M47h Offset_Y_7Offset_Y_6Offset_Y_5Offset_Y_4Offset_Y_3Offset_Y_2Offset_Y_1Offset_Y_0 OFFSET_Y_REG_H_M48h Offset_Y_15Offset_Y_14Offset_Y_13Offset_Y_12Offset_Y_11Offset_Y_10Offset_Y_9Offset_Y_8 OFFSET_Z_REG_L_M49h Offset_Z_7Offset_Z_6Offset_Z_5Offset_Z_4Offset_Z_3Offset_Z_2Offset_Z_1Offset_Z_0 OFFSET_Z_REG_H_M4Ah Offset_Z_15Offset_Z_14Offset_Z_13Offset_Z_12Offset_Z_11Offset_Z_10Offset_Z_9Offset_Z_8表2. 寄存器(续)寄存器名地址位 7位 6位 5位 4位 3位 2位 1位 0寄存器DocID028927 Rev 1 [English Rev 1] 11/65WHO_AM_I_M4Fh01000000CFG_REG_A_M60hCOMP_TEMP_ENREBOOT SOFT_RST LP ODR1ODR0MD1MD0CFG_REG_B_M61h0000INT_on_DataOFFSet_FREQ OFF_CANC LPFCFG_REG_C_M62h0INT_MAG_PINI2C_DIS BDU BLE0Self_test INT_MAGINT_CTRL_REG_M63h XIEN YIEN ZIEN00IEA IEL IENINT_SOURCE_REG_M64h P_TH_S_X P_TH_S_Y P_TH_S_Z N_TH_S_X N_TH_S_Y N_TH_S_Z MROI INTINT_THS_L_REG_M65h TH7TH6TH5TH4TH3TH2TH1TH0INT_THS_H_REG_M66h TH15TH14TH13TH12TH11TH10TH9TH8STATUS_REG_M67h Zyxor zor yor xor Zyxda zda yda xdaOUTX_L_REG_M68h D7D6D5D4D3D2D1D0OUTX_H_REG_M69h D15D14D13D12D11D10D9D8OUTY_L_REG_M6Ah D7D6D5D4D3D2D1D0OUTY_H_REG_M6Bh D15D14D13D12D11D10D9D8OUTZ_L_REG_M6Ch D7D6D5D4D3D2D1D0OUTZ_H_REG_M6Dh D15D14D13D12D11D10D9D8表2. 寄存器(续)寄存器名地址位 7位 6位 5位 4位 3位 2位 1位 0寄存器磁力计12/65DocID028927 Rev 1 [English Rev 1]3磁力计3.1工作模式磁力模块提供两种功耗模式:高分辨率(HR )模式和低功耗(LP )模式。
电子罗盘调研
电子罗盘调研2014-02-211 电子罗盘功能介绍1.1 名字解释电子罗盘,也叫数字指南针,是利用地磁场来定北极的一种方法。
古代称为罗经,现代利用先进加工工艺生产的磁阻传感器为罗盘的数字化提供了有力的帮助。
现在一般有用磁阻传感器和磁通门加工而成的电子罗盘。
电子罗盘具有以下特点:●三轴磁阻效应传感器测量平面地磁场,双轴倾角补偿。
●高速高精度A/D转换。
●内置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
●内置微处理器计算传感器与磁北夹角。
●具有简单有效的用户标校指令。
●具有指向零点修正功能。
1.2 电子罗盘作用1.2.1 GPS导航定位的缺陷1) 虽然GPS在导航、定位、测速、定向方面有着广泛的应用,但由于其信号常被地形、地物遮挡,导致精度大大降低, 其信号可用性仅为60% ,甚至不能使用。
产生不精确定位的原因包括:①多路径效应:建筑物对GPS信号的反射②阴影:城市中高楼与高楼之间形成的“峡谷”内、浓密的植被下,信号接收效果较差③在隧道、地下停车厂造成的信号失锁④在接收信号差的地区延长了初始化时间⑤一些动态影响,如汽车大幅度增速与减速等。
以上原因都会导致GPS无法提供任何位置或者定位精度陡然下降。
2) 在静止的情况下,GPS也无法给出航向信息。
高精度电子罗盘可以对GPS信号进行有效补偿,保证导航定向信息100%有效,即使是在GPS信号失锁后也能正常工作,做到“丢星不丢向”。
3) 安全及可靠性风险。
美国出于自身利益上的考虑,从不承诺不实施SA干扰和区域关闭,这更给GPS用户带来很大疑惑和担心。
因此,将GPS与电子罗盘相结合,二者相互补充,组合使用是导航领域的理想选择。
例如:美国虽然其完全独立掌握GPS 的卫星资源,但为了使系统更加可靠,使导航信息100%有效,其M1坦克及其它一些重要装备上仍加装了C100电子罗盘。
1.2.2 电子罗盘主要用途电子罗盘主要用于辅助GPS导航及在静止状态获取航向,具体包括加速度和方向的定位、倾角测量等功能。
基于LSM303DLH集成传感器的电子罗盘实现方法

基于LSM303DLH集成传感器的电子罗盘实现方法电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0º- 360º之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
HMR3500数字磁罗盘套件 用户手册说明书
HMR3500数字磁罗盘套件用户手册目录1. 前言 (3)1.1 版本 (4)2. 操作原理 (4)2.1 电子硬件 (5)2.2 信号处理 (5)3. 安装 (6)3.1 罗盘安装 (6)3.2 电源 (7)3.3 线路连接 (8)4. 测试考虑因素 (9)4.1 主机 (9)4.2 磁补偿 (9)4.3 发光二极管显示器 (10)4.4 串行数据接口 (10)5. 测试软件 (11)5.1 测试软件安装 (11)5.2 演示概要 (11)5.3 启动 (12)5.4 请求和指令 (13)5.3.1 文件菜单 (13)5.4.1 视图菜单 (14)5.4.3 罗盘菜单 (16)5.4.4 罗盘自差补偿 (19)5.5.5 帮助 (21)5.5 数据记录 (21)5.5.1 文件描述 (21)6. 软件消息接口 (23)6.1 信息包(包)格式 (23)6.2 数字数据格式 (24)6.3 协议 (24)6.4 消息描述 (25)6.4.1 软件复位 (27)6.4.2 打开电源 (27)6.4.3 设置波特率值 (28)6.4.4 自检测 (29)6.4.5 状态 (30)6.4.6 刻度初始化 (30)6.4.7 设置电源上升的默认值 (31)6.4.8 磁偏差初始化 (33)6.4.9 地磁场模型-WMM (34)6.4.10 版本 (35)6.4.11 罗盘定向 (36)6.4.12 罗盘磁力补偿 (37)6.4.13 DORIENT消息传输率 (39)7. 术语和缩写词 (40)8. 参考文献 (41)插图目录图1:HMR3500数字磁罗盘电子元件 (3)图2:HMR3500数字磁罗盘模块示意图 (4)图3:工程评估套件硬件 (6)图4:安装尺寸 (7)图5:CompassHost程序主窗口显示器 (12)图6:状态浏览窗口 (15)图7:导航控制窗口 (15)图8:对话框初始化 (16)图9:磁偏差对话框 (18)图10:罗盘磁补偿过程 (20)表格目录表1:接口引出针脚的定义 (8)表2:数字数据格式 (24)表3:消息列表 (26)1.前言非常感谢阁下从Honeywell购买HMR3500数字磁罗盘工程评估成套件。
Pixhawk简介
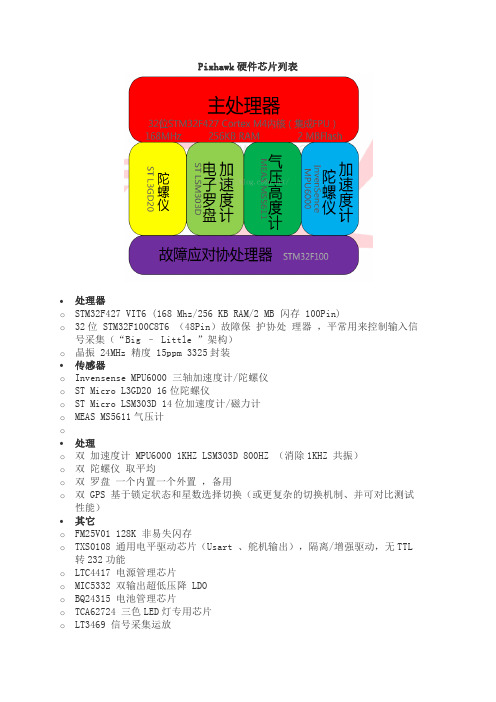
Pixhawk硬件芯片列表•处理器o STM32F427 VIT6 (168 Mhz/256 KB RAM/2 MB 闪存 100Pin)o32位 STM32F100C8T6 (48Pin)故障保护协处理器,平常用来控制输入信号采集(“Big –Little ”架构)o晶振 24MHz 精度 15ppm 3325封装•传感器o Invensense MPU6000 三轴加速度计/陀螺仪o ST Micro L3GD20 16位陀螺仪o ST Micro LSM303D 14位加速度计/磁力计o MEAS MS5611气压计o•处理o双加速度计 MPU6000 1KHZ LSM303D 800HZ (消除1KHZ 共振)o双陀螺仪取平均o双罗盘一个内置一个外置,备用o双 GPS 基于锁定状态和星数选择切换(或更复杂的切换机制、并可对比测试性能)•其它o FM25V01 128K 非易失闪存o TXS0108 通用电平驱动芯片(Usart 、舵机输出),隔离/增强驱动,无TTL 转232功能o LTC4417 电源管理芯片o MIC5332 双输出超低压降 LDOo BQ24315 电池管理芯片o TCA62724 三色LED灯专用芯片o LT3469 信号采集运放o可外接 MS4522D 数字差压空速计(6.6V ADC 输入)3.Pixhawk传感器列表空速计---IIC接口电源管理SMbus---IIC航灯接口---IICBMA180角速度传感器----SPI地磁HMC5883---IIC/SPIL3GD20陀螺仪----SPILSM303D角速度/地磁-----SPI超声波MB12xx----IICMD25---IICMPU6000----SPIMS5611气压计----SPI板载灯控制器TCA62724FMG-----IICPC8574(IIC转并) ----IICPCA9685(IIC/PWM)-----IIC光流模块----IIC4.pixhawk硬件构架5.pixhawk硬件连接关系(1)对照原理图查看所有传感器及接口方式,在F4上的接口;(2)研究下F4和F1的沟通连接方式,以及F1的主要任务;(3)基于以上两点,结合框架文档丰富对硬件架构的认识;规定以下没有括号()的表示网络标号,有括号()的表示具体引脚stm32f427Invensense MPU6000三轴加速度计/陀螺仪PC2(stm32f427)---MPU_CS---CS(MPU6000)PA6(stm32f427)---SPI_INT_MISO---AD0/SDO(MPU6000)PD15(stm32f427)---MPU_DRDY---INT(MPU6000)PA7(stm32f427)---SPI_INT_MOSI---SDA/SDI(MPU6000)PA5(stm32f427)---SPI_INT_SCK---SCL/SCLK(MPU6000)电源VDD_3V3_SENSORSST Micro L3GD20 16位陀螺仪PC13(stm32f427)---GYRO_CS---CS(L3GD20)PA6(stm32f427)---SPI_INT_MISO---SDO/SA0(L3GD20)PB0(stm32f427)---GYRO_DRDY---INT(L3GD20)PA7(stm32f427)---SPI_INT_MOSI---SDA/SDI/SDO(L3GD20) PA5(stm32f427)---SPI_INT_SCK---SCL/SPC(L3GD20)电源VDD_3V3_SENSORSST Micro LSM303D 14位加速度计/磁力计PC15(stm32f427)---ACCEL_MAG_CS---CS(LSM303D)PA6(stm32f427)---SPI_INT_MISO---SDO/SA0(LSM303D)PB4(stm32f427)---ACCEL_DRDY---INT1(LSM303D)PA7(stm32f427)---SPI_INT_MOSI---SDA/SDI/SDO(LSM303D) PA5(stm32f427)---SPI_INT_SCK---SCL/SPC(LSM303D)PB1(stm32f427)---MAG_DRDY---INT2(LSM303D)电源VDD_3V3_SENSORSMEAS MS5611气压计PD7(stm32f427)---BARO_CS---CS(MS5611)PA6(stm32f427)---SPI_INT_MISO---SDO (MS5611)PA7(stm32f427)---SPI_INT_MOSI---SDI/SDA (MS5611)PA5(stm32f427)---SPI_INT_SCK---SCLK(MS5611)电源VDD_3V3_SENSORS存储器PB13(stm32f427)---FRAM_SCK---C(FM25V01)PB14(stm32f427)---FRAM_MISO---Q(FM25V01)PB13(stm32f427)---FRAM_MOSI---D(FM25V01)PD10(stm32f427)---FRAM_CS---S(FM25V01)电源FMU-VDD_3V3高亮LEDPB8(stm32f427)---FMU-I2C1_SCLPB9(stm32f427)---FMU-I2C1_SDAPB10(stm32f427)---FMU-I2C2_SCLPB11(stm32f427)---FMU-I2C1_SDAUSBPA9(stm32f427)---VBUS 电源PA11(stm32f427)---OTG_FS_DMPA12(stm32f427)---OTG_FS_DPPC0(stm32f427)--- VBUS_VALID USB电源有效标志TF卡PC8(stm32f427)---SDIO_D0PC9(stm32f427)---SDIO_D1PC10(stm32f427)---SDIO_D2PC11(stm32f427)---SDIO_D3PC12(stm32f427)---SDIO_CKTEL2_OSDPD8(stm32f427)---FMU-USART3_TXPD9(stm32f427)---FMU-USART3_RXPD11(stm32f427)---FMU-USART3_CTSPD12(stm32f427)---FMU-USART3_RTSTEL1_数传PD3(stm32f427)---FMU-USART3_ CTSPD4(stm32f427)---FMU-USART3_ RTSPD5(stm32f427)---FMU-USART3_TXPD6(stm32f427)---FMU-USART3_RX面板GPSPA0(stm32f427)---FMU-UART4_TXPA1(stm32f427)---FMU-UART4_RX面板CANPD0 (stm32f427)---CAN1_RXPD1 (stm32f427)---CAN1_TX6路辅助PWMPE14(stm32f427)---FMU-CH1PE13(stm32f427)---FMU-CH2PE11(stm32f427)---FMU-CH3PE9 (stm32f427)---FMU-CH4PD13(stm32f427)---FMU-CH5PD14(stm32f427)---FMU-CH6LEDPE12(stm32f427)---FMU-LED_AMBERstm32f427与stm32f100连接PC6(stm32f427)---SERIAL_FMU_TO_IO---PA3(stm32f100) PC7(stm32f427)---SERIAL_IO_TO_FMU---PA2(stm32f100) stm32f1008路主PWMPA0(stm32f100)---IO-CH1PA1(stm32f100)---IO-CH2PB8(stm32f100)---IO-CH3PB9(stm32f100)---IO-CH4PA6(stm32f100)---IO-CH5PA7(stm32f100)---IO-CH6PB0(stm32f100)---IO-CH7PB1(stm32f100)---IO-CH8安全开关PB5(stm32f100)---SAFTYLEDPB13(stm32f100)---IO-LED_SAFTY PB14(stm32f100)---IO-LED_BLUE PB15(stm32f100)---IO-LED_AMBER PPM接收PA8(stm32f100)---PPM_INPUTS.BUSPB4(stm32f100)---SBUS_OUTPUT_EN PB10(stm32f100)---SBUS_OUTPUT PB11(stm32f100)---SBUS_INPUT JTAG电源IO-VDD_3V3PA13(stm32f100)---IO-SWDIOPA14(stm32f100)---IO-SWCLKPB3(stm32f100)---IO-SWO卫星接收机PA10(stm32f100)---IO-USART1_RX PB15(stm32f100)---IO-LED_AMBERPA10(stm32f100)--- VDD_3V3_SPEKTRUM 电源。
盛瑟传感电子罗盘磁场传感器模块SM07-DC说明书
电子罗盘磁场传感器模块(型号:SM07-DC)使用说明书版本号:1.1实施日期:2021.9.22电话:邮箱:网址:https://声明本说明书版权属成都盛瑟传感技术有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用盛瑟传感的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您不依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
成都盛瑟传感技术有限公司电话:************邮箱:****************网址:https://电话:************邮箱:****************网址:https://一、产品描述模块内部自带电压稳定电路,工作电压3.3V-5V,引脚电平兼容3.3V/5V的嵌入式系统,连接方便。
支持串口、IIC两种数字接口,IIC是直接连接芯片,方便用户选择最佳的开发连接方式。
串口可输出由磁场解析的航向角度,最高100Hz数据输出速率。
输出速率0.1~100Hz可调节。
2层PCB板工艺,更薄、更小、更可靠。
输出两种模式:串口模式、IIC模式。
电话:************邮箱:****************网址:https://二、性能参数产品型号SM07-DC 传感器类型半导体系列供电电压DC 3.3V~5V/建议+5V供电工作电流小于6毫安模块体积15.24mm *15.24mm *7.8mm 焊盘间距上下100mil(2.54mm)左右600mil(15.24mm)测量内容三轴的磁场和角度通信方式IIC通信和串口通信通信速率9600回传速率0.1-100HZ可调节灵敏度3000LSB/Gauss 量程-8Gauss ~+8Gauss三、引脚说明四、硬件连接电子罗盘磁场传感器模块与计算机连接通信,需要USB转TTL电平的串口模块。
科技论文报告会
中国地质大学(武汉)第二十三届学生科技报告会项目名称数字地质罗盘仪项目所属类别发明创造类项目负责人贾兵小组人员陈荣伟王积善崔文叶院系专业资源勘查工程二○一二年十月目录一:罗盘仪基本功能和使用方法介绍........................................ (1)岩层产状测量方法.............................................................. (2)线理产状测量方法............................................................... (3)导线方向和仰角俯角测量................................................... 二:和传统罗盘的操作对比和优势简介...................................... (1)岩层产状的测定.................................................................... (2)优势简介................................................................................. 三: 罗盘仪内部结构和原理介绍.................................................... (1)罗盘仪用到的传感器简单介绍............................................. (2)利用该传感器求产状等的设计思路及相关算法.............. (3)单片机内程序设计思路............................................... (4)液晶显示屏介绍......................................................... 四: 不足之处和正在改进地方......................................................... (1)受到外界磁场干扰造成结果错误.......................................... (2)理想的解决问题的方向.......................................................... (3)解决难点..........................................一:罗盘仪基本功能和使用方法介绍岩层产状测量方法:1.一次测量:旋转旋钮至1档,将罗盘仪平贴在岩层面上,待稳定后读数,按确认键即可。
三轴加速度计的参数对比
MMA8451模块数字三轴加速度模块高精度倾斜度模块arduino •供电电压:1.95V 至3.6V•接口电压:1.6 V至 3.6 V•±2g/±4g/±8g 动态量程可选•输出数据速率(ODR) 范围: 1.56Hz 至800 Hz•噪声:99μg/√Hz•14 位和8 位数字输出•I2C 数字输出接口(在上拉电阻为4.7 kΩ时,最高频率可达2.25MHz)•适用于7个中断来源的 2 个可编程中断引脚• 3 个运动检测嵌入式通道o自由落体或•MMA7361LC 三轴加速度传感器倾角传感器模块(可替代MMA7260•板载MMA7361(取代MMA7260)低成本微型电容式加速度传感器;••2、支持5V/3.3V电压输入,板载RT9161,比1117更低的压降,更快的负载相应速度,非常适合高噪声电源环境;••3、量程通过单片机IO选择,也可以电阻选择;••4、常用的引脚已经引出,插针为标准100mil(2.54mm),方便用于点阵板;••5、休眠使能可以通过单片机IO控制;••6、PCB尺寸:27.9(mm)x16.8(mm)。
小型四旋翼无人机飞行控制系统设计与实现
小型四旋翼无人机飞行控制系统设计与实现李杰;齐晓慧;韩帅涛;刘星海【摘要】为进一步深入研究和开发小型四旋翼无人机搭建飞行控制实验系统,从硬件设计、软件开发和系统调试与飞行试验3个方面对搭建的小型四旋翼无人机飞行控制系统进行较为详细地阐述.飞行试验表明:所设计的飞行控制系统初步实现了对机体姿态的有效控制,为进一步研究自主飞行奠定了基础.【期刊名称】《中国测试》【年(卷),期】2014(040)002【总页数】4页(P90-93)【关键词】小型四旋翼无人机;飞行控制系统;硬件设计;软件设计;系统调试;飞行试验【作者】李杰;齐晓慧;韩帅涛;刘星海【作者单位】军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003【正文语种】中文【中图分类】V279;V249;V217;TP2730 引言随着嵌入式处理器、传感器、导航、通信、动力与能源供给以及控制理论等技术的发展,具有广阔军事和民用前景的小型四旋翼无人机的研究与开发已经取得了很大的进展并逐步得到广泛应用[1-5]。
搭建飞行控制实验系统对深入研究与开发小型四旋翼无人机有很重要的现实意义。
通过这个平台可以展开控制算法、控制系统和导航等方面的研究,为实现小型四旋翼无人机在复杂环境中的自主飞行、编队飞行以及应用打下基础。
本文从硬件设计、软件开发、系统调试与飞行试验3个方面对搭建的飞行控制系统进行较为详细的阐述,并在系统调试的基础上进行有关飞行试验。
1 硬件设计与实现1.1 飞行控制系统硬件总体设计整个飞行控制系统硬件构成包括中心控制模块、传感器模块、四电机控制模块、遥控接收机/导航控制模块、无线通信模块和电压转换模块等部分[6]。
(1)中心控制模块即飞行控制系统的的核心处理器,是系统的核心控制部分。
负责采集传感器(包括九轴姿态传感器和高度传感器)信息并实时解算出机体姿态角和高度;根据遥控接收机信息或者导航信息,结合实时解算的机体姿态角和高度,控制电机转速;通过无线通信模块与地面站进行数据双向传输,包括上传控制指令或修改参数和下传飞行状态数据。
数字式电子罗盘毕业设计
毕业设计说明书数字式电子罗盘设计学生姓名:孔垂礼学号: ********** 学院:计算机与控制工程专业:电气工程及其自动化指导教师:***2015 年 06 月数字式电子罗盘设计摘要数字式电子罗盘具有很多优点,例如:体积比较小、启动非常迅速、功率损耗较低、制造成本低廉等,当今社会测控技术对测向传感器提出了非常高的要求;为了提高数字罗盘的测量精度,特意设计了一种基于HMC5883L三轴磁阻传感器[1]的数字电子罗盘;在分析相关类似产品的基础上,特别强调对电源、器件选型、信号调理电路、软件设计等方面进行了分析研究,设计出了数字罗盘并且研制了试验的样机;为验证设计效果,在双轴陀螺测试转台上进行了测试,试验结果初步验证了该设计方案的可行性;论文的研究工作可以为研究和改良数字式磁罗盘的测量准确度提供可靠的资料.关键词:地磁场,数字罗盘,HMC5883L三轴磁阻传感器,重力加速度计Here is the translation of your chinese paper’s titleAbstractDigital electronic compass, has small volume, quick start, low power consumption, and low cost, the modern measurement and control technology puts forward higher requirements on sensor of direction finding; In order to improve the precision of the digital compass, we design a HMC5883L triaxial magnetic resistance sensor based digital electronic compass; On the basis of the analysis of related products, focuses on the power supply, device selection, signal conditioning circuit and software design are analyzed in aspects of research, design the digital compass and test prototype was developed; To verify the design effect, on the two-axis gyro testing table was tested, experimental results verify the feasibility of the design scheme of; Thesis research work could be used to research and provide reference for improving the measuring accuracy of digital magnetic compass.Key words : Earth's magnetic field, digital compass, HMC5883L three-axis magnetic resistance sensor, the gravity accelerometer目录摘要 (2)Abstract (3)目录...........................................................................................................................................错误!未定义书签。