高速脉冲原点返回指令说明
FX3U·FX3UC定位指令一览

FX3U·FX3UC定位(dìngwèi)指令(zhǐlìng)一览一、原点回归(huíguī)指令一、停止(tíngzhǐ)指令在一般的STOP动作(dòngzuò)(减速停止)中,使用[指令的OFF]或者[正转极限标志位和反转极限标志位]。
在为了避免危险而要求立即停止的场合,请使用脉冲停止标志位。
但是,如果在定位指令的执行过程中将脉冲输出停止标志位置ON,那么脉冲输出立即停止。
因此有电机立即停止、设备损坏的危险。
二、指令执行结束标志位、指令执行异常结束标志位三、FNC157-PLSV可变速脉冲输出执行PLSV指令一次,则D1中脉冲量以S1的频率从D2输出。
四、传送(chuán sònɡ)指令将软元件的内容传送(chuán sònɡ)到其他的软元件中的指令。
例子(lì zi):成组位软元件(yuánjiàn)的传送:例子(lì zi):五、四则逻辑运算DIV除法指令是将S1制定的常数或源元件中的二进制数作为被除数,除以S2指定(zhǐdìng)的常数或源元件中的二进制除数,商送到指定的目标元件D中去,榆树送到目标元件D+1 的元件中。
内容总结(1)FX3U·FX3UC定位指令一览原点回归指令一、停止指令在一般的STOP动作(减速停止)中,使用[指令的OFF]或者[正转极限标志位和反转极限标志位](2)在为了避免危险而要求立即停止的场合,请使用脉冲停止标志位(3)但是,如果在定位指令的执行过程中将脉冲输出停止标志位置ON,那么脉冲输出立即停止。
plc 原点回归指令程序

plc原点回归指令程序
PLC原点回归指令是用于将执行机构的当前位置归零的指令。
原点回归指令通常用于以下场景:
●设备启动时,需要将执行机构归零。
●设备发生故障后,需要将执行机构归零。
●需要重新设置执行机构的位置。
PLC原点回归指令的语法如下:
1.ZRN[S1 S2]
2.S1:原点回归速度,单位为脉冲/秒。
3.S2:爬行速度,单位为脉冲/秒。
ZRN指令的执行过程如下:
●执行机构以S1速度向原点方向运动。
●当执行机构遇到限位开关时,将速度减小到S2。
●执行机构继续向原点方向运动,直到限位开关复位。
●执行机构停止运动,并将当前位置归零。
FPΣ高速脉冲输出功能上

脉冲输出功能本章节是对有关FP∑输出功能作了介绍脉冲输出功能的概述用到的指令和操纵器利用FP∑的脉冲输出功能,能够操纵脉冲串输入形式的电机驱动器,来实现定位操纵。
专用指令F171(SPDH)能够依照设置的初始速度、最大速度、加/减速时刻和目标值,自动输出所要求的脉冲,实现梯形起落速的定位操纵。
专用指令F171(SPDH)还能实现自动回原点功能。
专用指令F172(PLSH),能够实现点动(JOG)的脉冲输出。
目标值也能够被设置,以便脉冲输出能在目标值匹配时停下来。
专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位操纵依照数据表来工作。
专用指令F175(SPSH),能实现线性插补操纵。
通过指定合成速度,加/减速时刻和目标值,这条指令利用线性插补操纵实现脉冲输出。
专用指令F176(SPCH),能实现圆弧插补操纵。
用户能够从两种形成圆弧的方式当选择其一。
一种是指定通过的位置,另一种是指定一个圆心位置。
通过指定不同的参数,脉冲利用圆弧插补实现输出。
注意:直线插补操纵指令F175(SPSH)和圆弧插补操纵指令F176(SPCH)只能和C32T2操纵单元配合利用。
设置系统寄放器当利用脉冲输出功能时,应将相应通道的系统寄放器和设置为“不利用高速计数器”。
几种脉冲输出方式正/反向脉冲输出方式在这种方式中,操纵器利用双向脉冲工作,一个为正向旋转脉冲,另一个为反向旋转脉冲图84:FP∑脉冲输出功能—CW/CCW 输出方式脉冲+方向输出方式(正向:关/反向:开)F0F1 OFF ON在这种方式中,操纵器利用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。
图85:FP∑脉冲输出—脉冲+方向输出方式1脉冲+方向Y0Y1 ON OFF在这种方式中,操纵器利用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。
欧姆龙CP1H原点搜索和原点返回功能

欧姆龙CP1H原点搜索和原点返回功能
1、定义原点的⽅式
(1)利⽤:原点输⼊信号、原点接近信号、CW限位输⼊信号、CCW限位输⼊信号,通过ORG指令进⾏原点搜索,搜索完成后,将脉冲输出当前值,即A276寄存器清零,原点标志位,即A280.05置0。
(2)利⽤INI指令,直接将脉冲输出当前值,即A276寄存器清零,原点标志位,即A280.05置0,表⽰原点已建⽴。
需要设定的参数:操作模式、原点搜索反转模式、原点侦测⽅式、原点搜索⽅向等。
2、原点返回功能
建⽴了原点后,可以通过ORG命令,进⾏原点返回。
若设备未定义原点,电机仍可运⾏,但是
(1)⽆法使⽤原点返回功能;
(2)不能通过绝对脉冲指令进⾏发送脉冲(因为没有建⽴脉冲的基准点,零点,⽆法得知具体位置);
(3)通过相对脉冲的定位会将当前位置置0,然后发送脉冲(原点⼀直在变化)。
3、原点搜索的三种操作模式
主要过程:
区别:。
欧姆龙CJ系列操作手册(中文)

CJ系列内置I/OCJ1M CPU22/CPU23 CPU单元操作手册2002年11月ivv注意:OMRON 产品是为合格的操作人员按照正常步骤使用并只为本手册中所叙述的目的而制造的。
下列约定是用来指出本手册中的注意事项,并对其进行分类。
始终注意它们所规定的情况。
不注意这些注意事项能导致对人体的伤害或危及财产。
! 指出一个急迫的危险情况,如不避免之,它会导致死亡或严重伤害。
! 指出一个潜在的危险情况,如不避免之,它能导致死亡或严重伤害。
! 指出一个潜在的危险情况,如不避免之,它可能导致轻度的或中度的伤害,或财产损失。
OMRON 产品附注所有OMRON 产品在本手册中都以大写字母表示。
当字“单元”表示 OMRON 产品时,它也以大写字母表示,不管它是否以产品的正式名称出现。
缩写“Ch ”,它出现在某些显示中和某些OMRON 产品上,往往表示“字”,在这个意义上在文件中缩写为“Wd ”。
缩写“PLC ”表示可编程序控制器。
但是,在有些编程设备的显示中用“ PC ”来表示可编程序控制器。
直观标题列在本手册左侧的下列标题是帮助读者确定各种不同类形的资料。
注指出对有效而方便地运用产品特别重要的资料。
1,2,3...1.指出一种或另一种的列举说明,如步骤,检查表,等。
OMRON, 2002版权所有,事先未经OMRON 公司书面许可,本出版物的任何部分都不可用任何形式,或用任何方法,机械的,电子的,照相的,录制的或其它方式进行复制,存入检索系统或传送。
对使用这里所包含的资料不负专利责任。
然而,因为OMRON 公司不断努力改进其高质量的产品,所以本手册中所含有的资料可随时改变而不另行通知。
在编写本手册时注意了一切可能的注意事项,然而,OMRON 公司对于可能的错误或遗漏不承担责任。
对于使用本出版物中所包含的资料导致的损害也不承担任何责任。
危险警告注意vi注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xi 1面向的读者 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii2一般注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii3安全注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii4操作环境注意事项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv5应用注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv6与EC规程的一致性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii第1章性能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 1-1性能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21-2按用途划分的功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5第2章概述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 2-1内置CPU单元输入的分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122-2内置CPU单元输出的分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152-3原点搜索功能的分配. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16第3章I/O规格和配线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 3-1I/O 规格. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203-2配线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233-3配线示例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32第4章数据区分配和PLC设置设定 . . . . . . . . . . . . . . . . . . . . . .51 4-1内置I/O的数据区分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524-2PLC设置设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524-3辅助区数据分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654-4脉冲输出时标志操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72第5章内置I/O功能使用说明. . . . . . . . . . . . . . . . . . . . . . . . . . .73 5-1内置输入. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745-2内置输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 915-3原点搜索和原点返回功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113第6章编程举例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135 6-1内置输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136vii附录A脉冲控制指令的组合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145 B脉冲指令在其它CPU单元中的应用. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149 C中断响应时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153viii关于本手册:本手册介绍CJ1M CPU22和CJ1M CPU23 CPU单元支持的内置I/O的安装和操作,还含有下面介绍的章节。
运动控制器“原点返回”的14种模式及参数说明
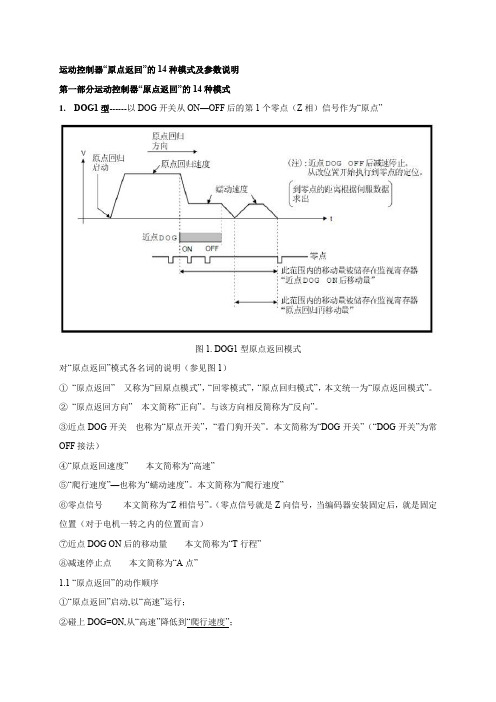
运动控制器“原点返回”的14种模式及参数说明第一部分运动控制器“原点返回”的14种模式1.DOG1型------以DOG开关从ON—OFF 后的第1个零点(Z相)信号作为“原点”图1. DOG1型原点返回模式对“原点返回”模式各名词的说明(参见图1)①“原点返回”---又称为“回原点模式”,“回零模式”,“原点回归模式”,本文统一为“原点返回模式”。
②“原点返回方向”---本文简称“正向”。
与该方向相反简称为“反向”。
③近点DOG开关---也称为“原点开关”,“看门狗开关”。
本文简称为“DOG开关”(“DOG开关”为常OFF接法)④“原点返回速度”------本文简称为“高速”⑤“爬行速度”—也称为“蠕动速度”。
本文简称为“爬行速度”⑥零点信号-------本文简称为“Z相信号”。
(零点信号就是Z向信号,当编码器安装固定后,就是固定位置(对于电机一转之内的位置而言)⑦近点DOG ON后的移动量------本文简称为“T行程”⑧减速停止点------本文简称为“A点”1.1 “原点返回”的动作顺序①“原点返回”启动,以“高速”运行;②碰上DOG=ON,从“高速”降低到“爬行速度”;③当DOG从ON---OFF,从“爬行速度”减速停止,速度降为零。
又从“零速”上升到“爬行速度”,当检测到第1个“Z相信号”时,该“Z相信号”位置就是“原点”。
同时该轴停止在原点位置上。
(从“减速停止点A”到“Z相)信号”点是定位过程,所以能够精确定位)1.2 “原点返回”不能正常执行的原因(1)从“原点返回启动位置”到“减速停止点A”这一区间内如果没有经过“Z相信号”点一次,(Z相通过信号M2406+20N),系统会产生报警(ZCT)并减速停止。
(ZCT)(错误代码120). “原点返回”不能正常执行。
(这种情况是“原点返回启动位置”到“DOG”距离很短。
走完DOG的行程还没经过“Z相信号”,系统无法识别“Z相信号”位置。
基于PLC控制伺服DZRN回原点指令与相对定位指令的分析
基于PLC控制伺服DZRN回原点指令与相对定位指
令的分析
DZRN回原点指令
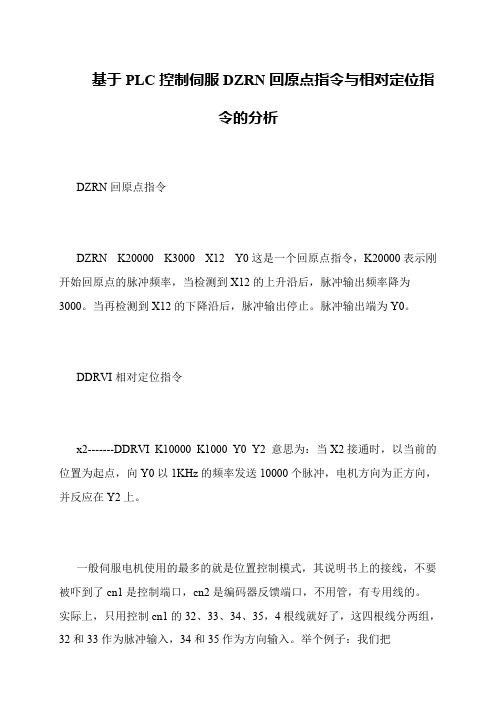
DZRN K20000 K3000 X12 Y0这是一个回原点指令,K20000表示刚开始回原点的脉冲频率,当检测到X12的上升沿后,脉冲输出频率降为3000。
当再检测到X12的下降沿后,脉冲输出停止。
脉冲输出端为Y0。
DDRVI相对定位指令
x2-------DDRVI K10000 K1000 Y0 Y2 意思为:当X2接通时,以当前的位置为起点,向Y0以1KHz的频率发送10000个脉冲,电机方向为正方向,并反应在Y2上。
一般伺服电机使用的最多的就是位置控制模式,其说明书上的接线,不要被吓到了cn1是控制端口,cn2是编码器反馈端口,不用管,有专用线的。
实际上,只用控制cn1的32、33、34、35,4根线就好了,这四根线分两组,32和33作为脉冲输入,34和35作为方向输入。
举个例子:我们把。
fx5u回原点指令
fx5u回原点指令
摘要:
1.介绍fx5u 回原点指令的基本概念
2.阐述fx5u 回原点指令的作用和原理
3.详述fx5u 回原点指令在自动化领域的应用
4.分析fx5u 回原点指令的未来发展趋势
正文:
FX5U 回原点指令是三菱PLC FX5U 系列中的一种指令,用于控制机器人在执行任务后能够准确返回原点,是实现自动化生产过程中机器人精准定位的重要手段。
FX5U 回原点指令的作用原理是,通过编程设定一个原点坐标,当机器人需要返回原点时,该指令会被激活,机器人会根据设定的原点坐标进行定位,然后返回到该坐标位置。
这一过程能够保证机器人在执行完任务后,能够快速、准确地返回原点,提高生产效率和生产质量。
在自动化领域,FX5U 回原点指令被广泛应用于各种机器人控制系统中。
例如,在汽车制造行业,机器人需要根据设定的原点坐标,完成焊接、装配、检测等任务,然后返回原点,准备执行下一个任务。
在电子制造行业,FX5U 回原点指令也被用于控制贴片机、插件机等设备的运行。
随着科技的不断发展,自动化领域的需求也在不断增长,对FX5U 回原点指令的要求也越来越高。
未来,FX5U 回原点指令将需要具备更高的定位精度、更快的返回速度,以满足更高速、更复杂的自动化生产需求。
同时,随着
物联网、大数据等技术的发展,FX5U 回原点指令也将与这些技术结合,实现更智能、更高效的自动化生产。
总的来说,FX5U 回原点指令是自动化生产过程中不可或缺的一种技术手段,其作用原理简单,但在实际应用中却能发挥重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表5.2脉冲输出功能说明
下面是对专用数据存储器DT90052控制代码的规定
特殊数据寄存器DT90052是设定标志专用寄存器,设定之后的值自动传入DT90190到DT90193中。
对于高速专用数据记录器的功能和脉冲输出功能的说明,参见表5.1~5.3。
梯形原点返回程序
说明:
设定3为接近终点。
X2为终点(CH0规定)
按下XA电机启动,启动频率100HZ最高频率1000HZ,过度时间500MS 按下X3时,表示接近终点,电机减速到100HZ
按下X2时,电机停止,表示已到达原点
(1)控制代码的指定(通过k值) 通过K值设定参看图3.45。
图3.45 通过K值设定说明
图示100:F171指令控制代号(原点返回时选择)
H
0:安装 *(1):控制代号
百分比
0:1/2 ( 50℅) 1:1/4(25%)
频率范围 0:1.5HZ-9.8KHZ
1: 48HZ-100KHZ 2: 191HZ-100KHZ 操作模式和输出方式 (一型原点返回,不带近原点输入。
有固定原点输入) 20: Ⅰ型原位返回 CW 21: Ⅰ型原位返回 CCW 22: Ⅰ型原位返回 输出为关 23: Ⅰ型原位返回 输出为开 24: Ⅰ型原位返回 CW 计数器重设 25: Ⅰ型原位返回 CCW 计数器重设 26: Ⅰ型原位返回 输出关和计数器重设 27: Ⅰ型原位返回 输出开和计数器重设
(二型原点返回,带近原点输入。
有固定原点输入,无固定近原点输入) 30: Ⅱ型原位返回 CW 31: Ⅱ型原位返回 CCW 32: Ⅱ型原位返回 输出为关 33: Ⅱ型原位返回 输出为开 34: Ⅱ型原位返回 CW 和计数器重设 35: Ⅱ型原位返回 CCW 和计数器重设 36: Ⅱ型原位返回 输出关和计数器重设 37: Ⅱ型原位返回 输出开和计数器重设
22: 减法计数 输出为关 23: 减法计数 输出为开
(*3):加速/减速时间“K 常数”
K30-K32767
(*4):偏差计数器清零标志“K 常数”
0.5ms-100ms。