机器人雅可比矩阵求法
机器人雅可比矩阵

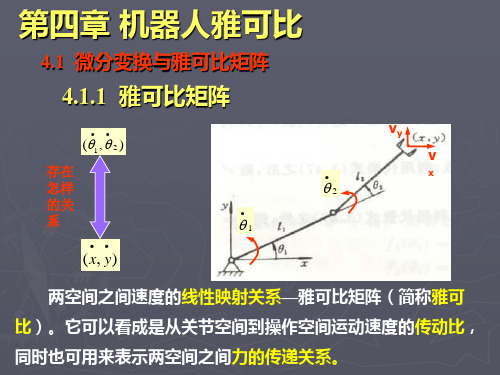
两自由度机器人
对于一个两自由度的机器人,其 雅可比矩阵是一个2x2矩阵,其 中包含了机器人的两个关节角度 和两个关节速度之间的线性关系
。
矩阵形式
雅可比矩阵的矩阵形式为:J = [[a, b], [c, d]],其中a、b、c、d 是机器人关节角度和关节速度之
间的线性关系系数。
计算方法
对于两自由度机器人,可以通过 已知的关节角度和关节速度,以 及机器人运动学方程,计算得到
解析机器人模型
计算偏导数
雅可比矩阵描述了机器人末端与控制输入 之间的关系,通过直接计算机器人关节变 量对末端位置和姿态的偏导数得到。
根据机器人的几何模型和关节类型,解析 机器人的运动学模型,得到末端位置和姿 态与关节变量的关系。
利用解析得到的运动学模型,计算机器人 末端位置和姿态对关节变量的偏导数,得 到雅可比矩阵的元素。
参数优化
调整雅可比矩阵的参数
通过对雅可比矩阵的参数进行调整,如增加或减少矩阵的行 或列,能够优化矩阵的计算过程,提高计算效率。
优化迭代算法的参数
对于使用迭代算法计算雅可比矩阵的情形,通过调整迭代算 法的参数,如增加迭代次数、改变收敛准则等,能够提高计 算精度和速度。
控制策略改进
引入新的控制策略
针对具体应用场景,引入新的控制策略,如采用模糊控制、神经网络等,能够更好地解决机器人控制问题,进而 改进雅可比矩阵的计算效果。
计算方法
对于四自由度机器人,可以通过 已知的关节角度和关节速度,以 及机器人运动学方程,计算得到 雅可比矩阵。
05
雅可比矩阵的优化与改进
优化算法选择
选用高效算法
对于雅可比矩阵的计算,选用高效的算法能够显著提升计算速度和精度,例如采 用数值差分法、有限元法等。
机器人运动学雅可比矩阵

05 雅可比矩阵的优化与改进
雅可比矩阵的稳定性分析
稳定性分析的重要性
在机器人运动控制中,雅可比矩阵的稳定性对机器人的运动性能 和动态响应具有重要影响。
稳定性判据
通过分析雅可比矩阵的特征值和特征向量,可以确定机器人的运动 稳定性,并为其运动控制提供依据。
通常使用齐次变换矩阵来表示机器人的位姿,该矩阵包含 了平移和旋转信息,能够完整地描述机器人在空间中的位 置和方向。
坐标系与变换
01
坐标系是用来描述物体在空间中位置和姿态的参照框架。
02
在机器人学中,通常使用固连于机器人基座的坐标系作为全局 参考坐标系,以及固连于机器人末端执行器的坐标系作为局部
参考坐标系。
THANKS FOR WATCHING
感谢您的观看
雅可比矩阵的物理意义
雅可比矩阵描述了机械臂末端执行器 的位置和姿态随关节变量变化的规律, 是机械臂运动学分析中的重要概念。
通过雅可比矩阵,可以分析机械臂的 可达工作空间、奇异性、运动速度和 加速度等运动学性能。
雅可比矩阵的计算方法
雅可比矩阵可以通过正向运动学和逆 向运动学两种方法计算得到。
在计算雅可比矩阵时,需要使用到线 性代数、微分方程等数学工具。
正向运动学是根据关节变量求解末端 执行器在参考坐标系中的位置和姿态; 逆向运动学是根据末端执行器的位置 和姿态求解关节变量。
04 雅可比矩阵在机器人运动 学中的应用
机器人的关节与连杆
关节
机器人的每个关节都有一个自由 度,决定了机器人的运动方式。 常见的关节类型包括旋转关节和 移动关节。
连杆
机器人学_机器人雅可比矩阵
0 0 0 1
若Rot(δx,δy,δz) 和Rot(δx‘,δy’,δz‘) 表示两
个不同的微分旋转,则两次连续转动的结果为:
1 (z z ' ) y y ' z z ' 1 (x x' ) Rot(x, y, z ) Rot(x' , y ' , z ' ) (y y ' ) x x' 1 0 0 0 0 0 0 1
Trans(d x , d y , d z )Rot(k , d ) I 44
于是得微分算子Δ
0 k d z k y d 0
k z d 0 k x d 0
k y d k x d 0 0
dx dy dz 0
四. 微分旋转的无序性 当θ→0 时,有sinθ→dθ,cosθ→1.若令δx=dθx,δy=dθy, δz=dθz,则绕三个坐标轴(p16)的微分旋转矩阵分别为
0 0 1 0
0 0 0 1
略去高 阶无穷 小量
0 y 1 xy 1 x Rot( x, x) Rot( y, y ) y x 1 0 0 0 1 xy y 0 1 x Rot( y, y ) Rot( x, x) y x 1 0 0 0
令 Trans(d x , d y , d z )Rot(k , d ) I 44 为微分算子
则相对基系有dT=Δ0T,相对i系有dT=TΔi 。这里Δ的下标不同是由 于微运动相对不同坐标系进行的。
三.微分平移和微分旋转 微分平移变换与一般平移 变换一样,其变换矩阵为:
1 0 Trans(dx, dy, dz) 0 0 0 1 0 0 0 dx 0 dy 1 dz 0 1
机器人运动学雅可比矩阵

机器人的雅可比矩阵
微分运动与速度
1、
微分运动指机构的微小运动,可用来推导不 同部件之间的速度关系。 机器人每个关节坐标系的微分运动,导致机 器人手部坐标系的微分运动,包括微分平移与微 分旋转运动。将讨论指尖运动速度与各关节运动 速度的关系。 前面介绍过机器人运动学正问题
r f ( )
一般情况:
nm6
r f ( )
对位置方程进行求微分得:
dr d J J r dt dt
两边乘以dt,可得到微小位移之间的关系式
dr Jd
J 表示了手爪的速度与关节速度之间关系, 称之为雅克比矩阵。
f1 1 f J T f m 1
ze
z0
P e
xe
Oe
ye
O0
x0
y0
指尖的平移速度为: dPe df dq dq v JL J Lq dt dq dt dt J L : 与平移速度相关的雅可比矩阵
0 0 Pe T f (q ) 0 1
以2自由度平面关节型机器人为例:
J J1 J2
f1 n m n R f m n
2、与平移速度有关的雅可比矩阵
相对于指尖坐标系的平移速度,是通过把坐标 原点固定在指尖上,指尖坐标系相对于基准坐 标系的平移速度来描述
O0 x0 y0 z0 Oe xe ye ze
:基准坐标系
:指尖坐标系
r f ( )
T m1 n1
r r1 , r2 , , rm R
1 , 2 , , n R
rj f j (1,2 ,,n )
g2o计算雅可比矩阵

g2o计算雅可比矩阵
G2O (Generalized 2nd-Order Optimization) 是一个通用的二阶优化库,可以用于解决各种优化问题,包括机器人定位、图形重建、传感器融合等。
在G2O中,雅可比矩阵的计算通常用于描述误差项的偏导数,对于非线性优化问题,雅可比矩阵的自动求导可以提高优化的速度。
假设有误差函数E(x),其中x是优化变量,E(x)的雅可比矩阵J(x)可以计算如下:
首先计算E(x)关于x的梯度(或者偏导数):
gradE = [E_x1, E_x2, ..., E_xn]
然后,J(x)就是gradE的转置:
J(x) = [E_x1, E_y1, ..., E_z1;
E_x2, E_y2, ..., E_z2;
...
E_xn, E_yn, ..., E_zn]
注意:这里的E_xi表示E(x)关于第i个优化变量的偏导数。
在G2O中,可以使用内置的函数来自动计算雅可比矩阵,这样可
以避免手动编写雅可比矩阵的计算代码,提高代码的效率和准确性。
具体的计算方法可以参考G2O的官方文档和示例代码。
02-课件:4.2 雅克比矩阵构建(矢量积法)

动学方程中的关节变量进行微分计算而得到的雅可比矩阵。
•
•
x q e J (q)
J --雅可比矩阵
机器人末端运动的描述(位姿、速度)
在操作空间中描述机器人末端的位姿,在关节空间中描述 关 节的角度:
对于转动关节
对于移动关节
机器人末端运动的描述(位姿、速度)
末端位姿的描述方法:
方向余弦
欧拉角
RPY角
3
3Z 3
2 3
R
1
2 2
3
3Z 3
2 3
R
T
2 2
3
3Z 3
c3 s3
0
s3 c3 0
0
0 2 2
•
3
3Z 3
c3 s 3
1
0
s3 c3 0
0 0
0
0
0
1
•
1
0
•
2
•
3
0 1
•1
0
•
2
•
3
3v3
3 2
R
2v2 2 2
2 3
R
1
2v2 2 2
3
3v
l1s2 l1c2
l2
•
0
l2
1
•
2
c12 s12 0
0 3
R
s
12
c12
0
0 0 1
3J
l1s2 l1c2
l2
0
l 2
通过速度传递关系计算雅可比矩阵(续9/9)
0
J
c12
s 12
s12 l1s2
c12
l1c2
l2
6轴机械臂雅可比矩阵公式
6轴机械臂雅可比矩阵公式
雅可比矩阵(Jacobian Matrix)是一个描述多维空间向量函数局部切空间的线性映射。
在机器人学中,雅可比矩阵通常用于描述关节空间和笛卡尔空间之间的映射关系。
一个n关节的机械臂的每个关节的变换可以用一个4x4的齐次变换矩阵来表示,总共有n个齐次变换矩阵。
对于一个n关节的机械臂,其雅可比矩阵J是一个4x6n的矩阵,可以表示为:
J = [T1 T2 ... Tn]
其中Ti是第i个关节的齐次变换矩阵。
对于一个6轴机械臂,其雅可比矩阵J可以表示为:
J = [T1 T2 T3 T4 T5 T6]
具体地,如果第i个关节的齐次变换矩阵为:
Ti = [R(ai) 0; 0 1] [Ti-1]
其中R(ai)是一个3x3的旋转矩阵,表示绕ai轴的旋转,Ti-1是i-1关节的齐次变换矩阵,那么第i个关节的雅可比矩阵Ji可以表示为:
Ji = [R(ai) 0; 0 0] [Ji-1]
其中Ji-1是i-1关节的雅可比矩阵。
因此,对于一个6轴机械臂,其雅可比矩阵J可以表示为:
J = [R(a1) 0; 0 0] [R(a2) 0; 0 0] [R(a3) 0; 0 0] [R(a4) 0; 0 0] [R(a5) 0; 0 0] [R(a6) 0; 0 0]
其中R(ai)是绕ai轴的旋转矩阵,可以通过欧拉角、轴角或四元数等表示方法得到。
4-2雅可比矩阵构建(矢量积法)
雅可比矩阵用来描述机器人末端速度(在基坐标系或末端坐标系下)与关节速度之间的关系。
雅可比矩阵构建e J q q x ()∙∙=当选择好末端位姿的描述方式后,雅可比矩阵的行数和列数就确定了。
求取计算雅可比矩阵的方法有多种,如:1对位姿方程求导;2通过连杆速度递推计算得到;3通过连杆速度分析构造得出;4通过微分变换关系构造得出。
微分变换法矢量积法通过速度传递关系计算雅可比矩阵(例1/9)Rot X 10000cos sin 0(,)0sin cos 00001⎡⎤⎢⎥θ-θ⎢⎥θ=⎢⎥θθ⎢⎥⎣⎦Rot Y cos 0sin 00100(,)sin 0cos 00001θθ⎡⎤⎢⎥⎢⎥θ=⎢⎥-θθ⎢⎥⎣⎦Rot Z cos sin 00sin cos 00(,)00100001θ-θ⎡⎤⎢⎥θθ⎢⎥θ=⎢⎥⎢⎥⎣⎦c s s c T 111101000000100001-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦c s l s c T 221122200000100001⎡⎤-⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦l T 223100010000100001⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦通过速度传递关系计算雅可比矩阵(例2/9)c s R s c 121203121200001-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦Rot X 10000cos sin 0(,)0sin cos 00001⎡⎤⎢⎥θ-θ⎢⎥θ=⎢⎥θθ⎢⎥⎣⎦Rot Y cos 0sin 00100(,)sin 0cos 00001θθ⎡⎤⎢⎥⎢⎥θ=⎢⎥-θθ⎢⎥⎣⎦Rot Z cos sin 00sin cos 00(,)00100001θ-θ⎡⎤⎢⎥θθ⎢⎥θ=⎢⎥⎢⎥⎣⎦通过速度传递关系计算雅可比矩阵(续3/9)111111ωR ωθZ i i i i i i i i i ++++++=+ ()1111v R v ωP i i i i i i i i i i ++++=+⨯11001∙⎡⎤⎢⎥⎢⎥ω=⎢⎥⎢⎥⎢⎥⎣⎦θv 11000⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦通过速度传递关系计算雅可比矩阵(续4/9)1221211221122122222112122122212222222210000100000000001112T R Z R Z c s R Z s c Z c s s c ∙∙-∙∙∙∙⎡⎤ω=ω+=ω+⎣⎦⎡⎤⎢⎥⎡⎤=ω+=-ω+⎣⎦⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦∙∙⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦θθθθθθ+θθ通过速度传递关系计算雅可比矩阵(续5/9)()()()12211111111111211122112211212212222221000000000010010000101T v R v P R v P R v P l s c s l c s s c s c l -∙∙⎡⎤⎡⎤=+ω⨯=+ω⨯=+ω⨯⎣⎦⎣⎦⎛⎫⎡⎤⎡⎤ ⎪⎢⎥⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥ ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+⨯=-= ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦ ⎪⎢⎥⎢⎥⎣⎦⎣⎦⎝⎭θθ212110l c ∙∙⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦θθ通过速度传递关系计算雅可比矩阵(续6/9)111111ωR ωθZ i i i i i i i i i ++++++=+ ()1111v R v ωP i i i i i i i i i i ++++=+⨯通过速度传递关系计算雅可比矩阵(续7/9)()()()T v R v P R v P R v P l s c s l c s s c l c s c 13322222222222322233223322312332333312331000000010010001012-∙∙∙∙⎡⎤⎡⎤=+ω⨯=+ω⨯=+ω⨯=⎣⎦⎣⎦⎛⎫⎡⎤ ⎪⎡⎤⎢⎥ ⎪⎢⎥⎢⎥⎡⎤⎡⎤⎡⎤ ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+⨯=- ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ ⎪⎢⎥⎢⎥+⎣⎦ ⎪⎢⎥⎣⎦⎝⎭θθθθl s l s l c l l c l 121212212211100()010()11211200100∙∙∙∙∙∙∙∙⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥++=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦θθθθθθθθT R Z R Z R Z c s c s s c Z s c 133232232233223323323333333323332333331200000000000010011123∙∙∙-∙∙∙∙⎡⎤⎡⎤ω=ω+=ω+=ω+=⎣⎦⎣⎦⎡⎤⎢⎥⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-ω+=-+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦∙∙∙+⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦θθθθθθθ++θθθ通过速度传递关系计算雅可比矩阵(续8/9)3300123⎡⎤⎢⎥⎢⎥⎢⎥ω=⎢⎥⎢⎥∙∙∙⎢⎥⎢⎥⎣⎦++θθθl s v l c l 12331221()1120∙∙∙∙⎡⎤⎢⎥⎢⎥⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦θθθθl s l c l l v 121222300010020011∙∙⎡⎤⎢⎥+⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦θθl s v l c l l 1231222012∙∙⎡⎤⎢⎥⎡⎤=⎢⎥⎢⎥+⎣⎦⎢⎥⎢⎥⎣⎦θθc s R s c 121203121200001-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦l s J l c l l 12312220⎡⎤=⎢⎥+⎣⎦通过速度传递关系计算雅可比矩阵(续9/9)c s l s l s c l s c l s l s J s c l c l l l s s l c c l c l c l s l s l s l c l c l c 121212121211222122120121212221122121221221211212212112122120----⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎢⎥+++⎣⎦⎣⎦⎣⎦---⎡⎤=⎢⎥+⎣⎦l s l s l s J l c l c l c 11212212011212212---⎡⎤=⎢⎥+⎣⎦矢量积法对于移动关节,雅克比矩阵的第 i 列计算如下:雅可比矩阵的第i 列对应第i 关节引起的末端速度和角速度。
六自由度机械臂雅可比矩阵计算
六自由度机械臂雅可比矩阵计算机械臂雅可比矩阵是一个非常重要的概念,用于描述机械臂末端位移与关节位移之间的关系。
它可以用于控制机械臂的运动,实现准确的位置控制和轨迹跟踪等任务。
在本文中,我们将详细介绍六自由度机械臂雅可比矩阵的计算方法。
六自由度机械臂是指具有6个可独立运动的关节的机械臂。
常见的六自由度机械臂包括SCARA机械臂、工业机器人等。
对于一个六自由度机械臂,其雅可比矩阵是一个6行6列的矩阵,其元素表示机械臂末端位移在每个关节角度变化下的变化率。
雅可比矩阵的计算方法有两种常见的方法:几何方法和微分方法。
几何方法是一种基于末端位姿和关节角度的几何关系计算雅可比矩阵的方法。
具体步骤如下:1.假设机械臂由n个关节组成,每个关节的旋转轴为z轴,关节坐标系为{X0Y0Z0},末端坐标系为{XnYnZn}。
2.根据DH参数建立机械臂的坐标系链,得到各个坐标系的变换矩阵。
3.将末端坐标系的位姿表示为关节坐标系的位姿,通过一系列的正向变换矩阵计算得到。
4.根据位姿的变换关系,通过求导的方法计算出末端位置向各个关节变量的偏导数。
5.通过逆向传播的方法计算各个偏导数,得到雅可比矩阵。
微分方法是一种基于速度和力学关系计算雅可比矩阵的方法。
具体步骤如下:1.假设机械臂由n个关节组成,每个关节的旋转轴为z轴,关节坐标系为{X0Y0Z0},末端坐标系为{XnYnZn}。
2.根据DH参数建立机械臂的坐标系链,得到各个坐标系的变换矩阵。
3.基于运动学关系,计算出末端速度和各个关节速度之间的关系,得到雅可比矩阵的第一部分。
4. 根据Newton-Euler动力学方程,计算出末端力和各个关节力之间的关系,得到雅可比矩阵的第二部分。
5.将第一部分和第二部分相加,得到雅可比矩阵。
无论使用几何方法还是微分方法,都需要根据具体的机械臂的结构和运动学参数进行计算。
在实际应用中,可以使用数值方法或符号计算方法来求解雅可比矩阵。
数值方法可以通过数值逼近法来计算雅可比矩阵,但计算结果可能不够精确。
机器人雅可比矩阵表达式
机器人雅可比矩阵表达式
机器人雅可比矩阵是一种用于分析机器人运动学的方法。
它是一
个m x n矩阵,其中m是机器人的关节数,n是要求输出的目标点坐标数。
矩阵中的每一行对应于一个机器人关节,每一列对应一个目标点
坐标。
矩阵的每个元素都是一个实数,表示该关节的角度或目标点的
坐标值与机器人其他关节的角度或目标点的坐标值之间的依赖性。
通
过解雅可比矩阵,可以求出所需的机器人关节的角度值,从而实现机
器人末端外型的控制。
通常来说,雅可比矩阵是由机器人的齐次变换矩阵计算得来的,
如下所示:
T_01=T (θ1)*T (θ2)*T (θ3)*T (θ4)
T_02=T (θ1)*T (θ2)*T (θ3)*T (θ4)*T (θ5)
T_03=T (θ1)*T (θ2)*T (θ3)*T (θ4)*T (θ5)*T (θ6)
这里,T (θi)是一个4x4变换矩阵,代表第i个关节的关节转动,θi是该关节的角度。
现在,我们可以用下面的公式来计算雅可比矩阵:
J(θ)=(dT_0j/dθ1)T_01^-1+(dT_0j/dθ2)T_02^-
1+(dT_0j/dθ3)T_03^-1
这里,j=1,2,3,分别对应3个目标点的坐标值,即x、y、z。
可以看到,雅可比矩阵是一个m×n维矩阵,其中m是机器人的关
节数,n是要求输出的目标点坐标数。
它的元素表示每个关节的角度或
目标点的坐标值与机器人其他关节的角度或目标点的坐标值之间的依
赖性。
只要解雅可比矩阵,就可以获得机器人末端各个关节的角度值,从而将机器人移动到特定的目标位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人雅可比矩阵求法
机器人雅可比矩阵求法是机器人控制领域中的一种重要方法,它可以用来计算机器人末端执行器在关节空间中的速度和加速度。
雅可比矩阵是一个重要的数学工具,它可以将机器人的运动学和动力学问题转化为线性代数问题,从而简化计算过程。
雅可比矩阵是一个矩阵,它描述了机器人末端执行器在关节空间中的速度和加速度与关节角度之间的关系。
具体来说,雅可比矩阵的每一行代表末端执行器在某个方向上的速度或加速度,而每一列代表某个关节角度对末端执行器速度或加速度的影响。
因此,雅可比矩阵可以用来计算机器人末端执行器在关节空间中的速度和加速度,从而实现机器人的运动控制。
机器人雅可比矩阵求法的基本思想是通过对机器人的运动学和动力学方程进行求导,得到雅可比矩阵的表达式。
具体来说,机器人的运动学方程描述了机器人末端执行器在关节空间中的位置和姿态,而动力学方程描述了机器人末端执行器在关节空间中的速度和加速度。
通过对这两个方程进行求导,可以得到雅可比矩阵的表达式。
机器人雅可比矩阵求法的具体步骤包括以下几个方面:首先,需要确定机器人的运动学和动力学方程;其次,需要对这两个方程进行求导,得到雅可比矩阵的表达式;最后,需要将雅可比矩阵的表达式转化为矩阵形式,从而实现机器人的运动控制。
机器人雅可比矩阵求法是机器人控制领域中的一种重要方法,它可以用来计算机器人末端执行器在关节空间中的速度和加速度。
通过对机器人的运动学和动力学方程进行求导,可以得到雅可比矩阵的表达式,从而实现机器人的运动控制。