面对称导弹侧向扰动运动动态特性之欧阳理创编
导弹飞行力学力矩篇
导弹飞⾏⼒学⼒矩篇1.5俯仰⼒矩俯仰⼒矩与它是由导弹外形相对于11Ox z 平⾯不对称引起的。
⼀定常直线飞⾏时的俯仰⼒矩定长直线飞⾏:是指导弹的飞⾏速度V ,攻⾓а、舵偏转⾓δz 等不随时间变化的飞⾏状态。
但是,导弹⼏乎不会有严格的定常飞⾏。
即使导弹作等速直线飞⾏,由于燃料的消耗使导弹质量发⽣变化,保持等速直线飞⾏所需的攻⾓也要随之改变,所以只能说导弹在⼀段⽐较⼩的距离上接近于定常飞⾏。
若导弹做定常飞⾏,0z z ωαδ===即,则俯仰⼒矩系数的表达式为与a 轴交点为静平衡点。
z w ,,z αδ均为0,使作⽤在导弹上的,z αδ产⽣的所有升⼒相对于质⼼的俯仰⼒矩的代数和为零,即导弹处于纵向平衡状态轴对称导弹俯仰⼒矩系数平衡状态的全弹升⼒,称为平衡升⼒,其升⼒系数表达式为:⼆纵向静稳定性定义:导弹在平衡状态下飞⾏时,受到外界⼲扰作⽤⽽偏离原来平衡状态,在外界⼲扰消失的瞬间,若导弹不经操纵能产⽣附加⽓动⼒矩,使导弹具有恢复到原来平衡状态的趋势,则称导弹是静稳定的;若导弹产⽣的⽓动⼒矩使导弹更加偏离原平衡状态,则称导弹是静不稳定的;若产⽣的⽓动⼒0=z m 0z z z V V V0 z z z z z LLLm ωαδωαδαδωαδ========,,为时的⽓动⼒矩系数,矩为零,导弹既⽆恢复到原平衡状态的趋势,也不再继续偏离,则称到导弹是静中⽴稳定的判别导弹纵向静稳定性的⽅法是看偏导数0Bzm ααα==(即⼒矩特征曲线相对横坐标轴的斜率)的性质。
若导弹以某个平衡攻⾓Bα处于平衡状态下飞⾏,当攻⾓增加了α?(α?>0),使作⽤在焦点的升⼒增加,当舵偏转⾓保持不变时,有附加⼒矩:改变导弹的⽓动布局,从⽽改变焦点的位置。
改变导弹内部的部位安排,以调整全弹质⼼的位置。
三俯仰操纵⼒矩定义:舵⾯偏转后形成的空⽓动⼒对质⼼的⼒矩称为操纵⼒矩。
其表达式为其中rr x x L=为舵⾯压⼒中⼼⾄导弹头部顶点距离的⽆量纲量; z m z δ为舵⾯偏转单位⾓度时所引起的操纵⼒矩系数,称为舵⾯效率。
面对称高速飞行器横侧向耦合失控特性

Coupled Control Departure for Plane⁃Symmetrical High Speed Vehicles
SUN Chun⁃zhen HUANG Yi⁃min
( College of Automation Engineering Nanjing University of Aeronautics and Astronautics Nanjing 210016 China)
Citation Sun C Z Huang Y M. Coupled control departure for plane⁃symmetrical high speed vehicles[ J] . Physics of Gases 2021 6(6) 37⁃43.
38
2021 年 第 6 卷
引用格式
孙春贞
黄一敏
. 面对称高速飞行器横侧向耦合失控特性[
J] . 气体物理
2021
6(6)
37⁃43.
to the cross⁃control effect the system has non⁃minimum phase behavior. The criterion of control departure was deduced
which involves yawing moment coefficient versus sideslip and aileron cross⁃control effect on yawing moment and rudder con⁃
数、副翼⁃偏航耦合力矩导数以及方向舵产生偏航力矩导数的控制耦合偏离边界条件 根据偏航稳定力矩导数、副
翼⁃偏航耦合力矩导数的相对位置关系 确定控制耦合偏离区域 并分析了副翼控制滚转时的耦合失控特性. 最后
2006年西工大飞行力学考研试题答案(A)
试题名称:飞行器飞行力学(A 卷) 试题编号: 470 说 明:所有答题一律写在答题纸上 第 1 页 共 2 页一、 填空题(30分,每小题3分)1.攻角定义为导弹速度矢量在 的投影与 夹角。
2.轴对称导弹定常飞行时的纵向平衡关系式为 。
3.铅垂平面内弹道曲率半径与法向过载的关系式为 。
4.极限过载与临界迎角的关系式为 。
5.前置量导引法的导引关系式为 。
6.阵风干扰将产生 和 运动参数的初始偏差。
7.用动力系数描述的纵向短周期扰动运动动态稳定条件为 。
8.引入滚转角和滚转角速度信号的自动驾驶仪调节规律为 。
9.纵向阻尼动力系数的表达式为 。
10.轴对称导弹的主要理想操纵关系式为 。
二、问答题(30分,每小题5分)1.导弹在水平面内作侧滑而无倾斜飞行的方案有哪些?其理想控制关系式分别是怎样的?2.何谓横向静稳定性?影响飞航式导弹横向静稳定性的因素有哪些?3.前置量导引法的前置角ε∆的选取原则是什么?4.影响导弹反应舵偏的过渡过程品质指标有哪些?影响它们的传递参数分别主要是什么?5.为什么要在法向过载反馈的纵向姿态运动回路中加入限幅器?6.导弹按理想弹道飞行,其过载应满足怎样的关系式?三、分析讨论题(45分,每小题15分)1.已知调节规律z K K ϑϑδϑϑ∆=∆+∆ ,由反应此舵偏信号的zϑϑδ∆∆∆ 、、参数偏差的过渡过程曲线,讨论在ϑ∆参数偏差还为正时,舵面便出现了负偏值,即出现提前偏舵的现象、原因和结果。
2.分析弹道倾角对侧向动态稳定性的影响。
3.分析面对称导弹当存在绕1ox 轴的滚动角速度1x ω时,产生相对于1oy 轴的偏航力矩的物理成因。
试题名称:飞行器飞行力学(A 卷) 试题编号: 470 说 明:所有答题一律写在答题纸上 第 2 页 共 2 页四、 推导与证明题(25分,1小题9分,2小题9分,3小题7分)1.用矩阵法推导地面坐标系与弹道固连坐标系之间的方向余弦关系。
2.证明无倾斜稳定的导弹在外干扰作用下始终存在滚转角的稳态偏差值。
导弹飞行动力学与控制21页PPT

导弹飞行力学
第一章 导弹飞行的力学环境
1.1 常用坐标系及其变换关系
1. 常用坐标系
a. 地面坐标系oxyz
坐标原点:发射点 ox轴:目标方向 oy轴:垂直向上 oz轴:与 ox 轴和 oy 轴构
成右手坐标系
y x
o
目标
发射点
z
图1 地面坐标系
目的:确定导弹的空间姿态及速度方向等,以研究导弹 质心运动的规律(弹道)
导弹飞行力学
d. 速度坐标系oxcyczc
yc
弹道 o
导弹纵轴
v
zc
坐标原点:瞬时惯性中心
oxc轴:导弹速度方向
oyc轴:导弹纵向对称面内
与 oxc 轴垂直,向
xc
上为正
ozc轴:与 oxc 轴和 oyc 轴 构成右手坐标系
图4 速度坐标系
目的:作用于导弹的气动力在该坐标系内给出
导弹飞行力学
2. 坐标变换
o
z ψc
v sinθ
x2
θ
x
ψc
x2’
v cosθsinψ c
矢量与水平平面间的 夹角,即速度矢量在 地面坐标系 oxz 平面 内的投影 ox2’ 与 ox2 轴间的夹角,由 ox2’ 逆时针转向 ox2 时为 正
z2
ψc — 弹道偏角, ox2’ 轴与
图5 弹道固连坐标系与地面坐标系间的关系
地面坐标系 ox2 轴间 的夹角,由 ox2 轴逆
导弹飞行力学
ζ — 俯仰角,导弹纵轴 ox1 与 地面坐标系 oxz 平面间的 夹角, ox1 指向地面上方 时为正
ψ — 偏航角,导弹纵轴 ox1 在 地面坐标系 oxz 平面上的 投影 ox1’ 与地面坐标系 ox 轴间的夹角,由 ox 轴逆 时针转至 ox1’ 时为正
面对称导弹侧向扰动运动动态特性之欧阳术创编

面对称导弹侧向扰动运动动态特性仿真实验航天学院2183齐凯华2011.5.15一.实验问题描述已知某面对称导弹,以320米、秒得速度在高度为9000米的高空飞行。
在某特性点处各动力系数分别为:b11=1.86;b12=0.66;b14=6.8;b21=0.02;b22=0.20;bb24=0;b24=2.34;b36=-1;b34=0.06;a33=0;b35=-0.05;b17=-0.78;b56=0.0012;b18=-0.98;b37=0.018;b27=-0.9;但该型号的导弹在该特性点上飞行时,在外界偶然干扰或持续干扰的作用下,导弹在扰动作用结束后是沿着基准弹道继续飞行,从而击中目标,还是脱离基准弹道从而造成脱靶,这是控制导弹飞行的最基本问题,导弹稳定飞行的条件和动力系数的关系,以及导弹是否会出现副翼反逆现象都是本实验要研究讨论的问题。
二.实验要求问题:1.求在此特性点处侧向扰动运动的特征方程;由问题一的特征方程求其特征根,并讨论其稳定性;2.求在此特性点处如果受到偶然干扰作用,产生02β︒∆=,,,,x y ωωβγ∆∆∆∆的过渡过程函数,并绘出相应的曲线;3.此特性点处如果受到经常干扰'20.5( 5.3)y y M N m J =⋅=的作用,,,,x y ωωβγ∆∆∆∆的过渡过程函数,并绘出相应的曲线;4.建立以动力系数14b 和24b 为变量的侧向稳定边界条件,并绘出相应的侧向稳定便捷图;5.讨论是否会出现副翼反逆现象?如果会出现,其xδ∆要为多大?要克服“副翼反逆”现象,y δ∆的偏量方向及偏转量。
三.实验目的和意义本次实验的目的在于通过对扰动运动状态方程的求解,从而研究导弹在偶然和持续干扰作用下的的稳定性问题,求得导弹侧向状态参数的过渡过程函数,认识其随时间的变化过程。
其次,由霍尔维兹判据讨论导弹的侧向运动参数14b 和24b 所构成的区域的那一部分能是导弹稳定。
《飞行力学》作业习题
《飞行力学》作业习题第一部分:建模与虚拟飞行1.分别用坐标系之间的方向余弦表和转移矩阵推导三个几何关系方程。
2.用图表示面对称型飞行器横向静稳定度的三个主要来源。
3.建立描述导弹在铅垂平面运动的数学模型。
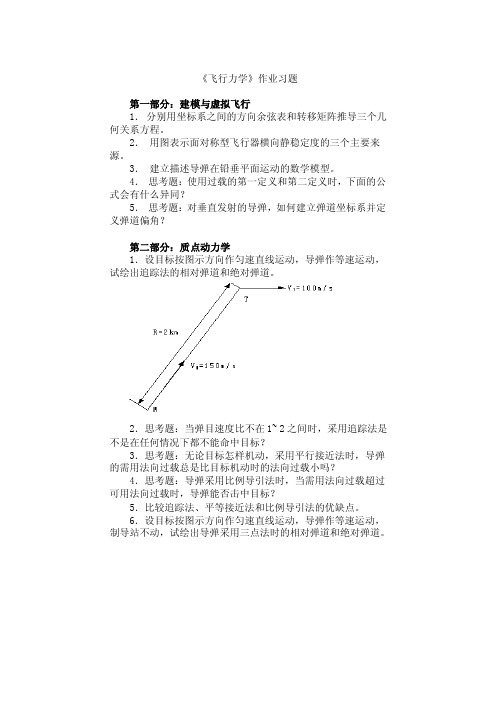
4.思考题:使用过载的第一定义和第二定义时,下面的公式会有什么异同?5.思考题:对垂直发射的导弹,如何建立弹道坐标系并定义弹道偏角?第二部分:质点动力学1.设目标按图示方向作匀速直线运动,导弹作等速运动,试绘出追踪法的相对弹道和绝对弹道。
2.思考题:当弹目速度比不在1~ 2之间时,采用追踪法是不是在任何情况下都不能命中目标?3.思考题:无论目标怎样机动,采用平行接近法时,导弹的需用法向过载总是比目标机动时的法向过载小吗?4.思考题:导弹采用比例导引法时,当需用法向过载超过可用法向过载时,导弹能否击中目标?5.比较追踪法、平等接近法和比例导引法的优缺点。
6.设目标按图示方向作匀速直线运动,导弹作等速运动,制导站不动,试绘出导弹采用三点法时的相对弹道和绝对弹道。
7.设目标按图示方向作匀速直线运动,导弹作等速运动,制导站不动,试绘出导弹采用三点法时的相对弹道和绝对弹道。
8.思考题:通过哪些措施可以减少三点法的攻击禁区。
9.写出三点法、前置量法和半前置量法的通式,比较三种方法的优缺点,10.进行导引弹道的运动学分析时有哪些假设条件?第三部分:动态特性分析1.试分析"瞬时平衡"假设与导弹飞行中力矩平衡的实际过程的差别。
2.试用石拱桥的构造原理解释小扰动法和导弹运动方程组线性化的合理性。
3.什么是系数冻结法,这一假设的意义何在?4.扰动运动分解为纵向和侧向扰动运动需要什么条件?5.动力系数a22、a24、a25、a34、a35、a33的物理意义是什么? 6.纵向自由扰动运动方程的特征根与扰动运动的稳定性之间有什么关系?7.说明导弹纵向扰动运动的组成与特征方程根的对应关系。
8.如何描述导弹纵向自由扰动的收敛与发散的快慢?9.纵向自由扰动运动为什么可以分解为长周期运动和短周期运动?10.推导并比较纵向扰动运动的传递函数和短周期运动的传递函数。
2017年西北工业大学 842飞行力学与结构力学 硕士研究生考试大纲

题号:842《飞行力学与结构力学》考试大纲一、考试内容根据我校教学及该试题涵盖专业的特点,对考试范围作以下要求:1、基本概念:压力中心;焦点;静稳定性;失速;瞬时平衡假设;纵向运动;攻击禁区;相对弹道;绝对弹道;理想弹道;理论弹道;基准运动;扰动运动;附加运动;强迫扰动运动;自由扰动运动;动态稳定性;操纵性;超调量;调节规律;特征方程及特征根。
2、坐标系及其转换:惯性坐标系;弹道坐标系;速度坐标系;弹体坐标系;坐标转换方程;迎角、侧滑角、弹道倾角、弹道偏角、姿态角、速度滚转角;作用在导弹上的力和力矩。
3、导弹运动方程的建立:导弹作为刚体的六自由度运动方程的建立;导弹作为可操纵质点的运动方程的建立;纵向运动方程的建立;平面运动方程方法的建立;轴对称和面对称导弹的操纵方法;理想操纵关系式。
4、过载:过载的概念;过载的投影;过载与运动参数之间的关系;过载与机动性的关系;过载与导弹结构强度设计之间的关系;过载与弹道形状的关系;需用过载;可用过载;极限过载;最大过载;过载与轨道半径的关系。
5、导引规律与弹道:导引弹道的研究方法、特点;相对运动方程的建立;追踪法;平行接近法;比例导引法;三点法;角度法;复合制导。
6、方案制导:方案制导的弹道方程;按要求给出方案弹道的具体方案。
7、干扰力和干扰力矩:风的干扰;发动机安装偏差;弹身对接偏差;弹翼安装偏差;控制系统误差。
8、扰动运动方程:扰动运动方程的建立;扰动运动方程与扰动源性质的关系;“系数”冻结法;扰动运动方程的拉氏解析求解方法;扰动运动方程特征根与扰动运动形态和稳定性的关系。
9、纵向扰动运动:纵向扰动运动动态特性的分析方法;纵向短周期扰动运动的分析;纵向短周期扰动运动的动态稳定条件的推导;纵向短周期扰动运动的动稳定性与静稳定性的关系;纵向短周期扰动运动的传递函数;舵面阶跃偏转时导弹的纵向操纵性分析。
10、侧向扰动运动:侧向扰动运动的建模;面对称导弹侧向扰动运动的模态分析;面对称导弹侧向扰动运动稳定边界条件及稳定边界图的确定和讨论;轴对称导弹侧向扰动运动的分析方法;航向扰动运动模型的特点;倾斜扰动运动的建模;倾斜扰动运动反映偶然和经常干扰的模态误差。
侧向运动耦合对导弹稳定裕度的影响_郭广明

运动参数有剧烈变化的点, 选取该时刻所对应的参 6]中的动力系数定义, 数。依据文献[ 经计算得到 如表 1 所示的动力系数。
表1
Table 1
各特征点处的动力系数
Dynamic coefficient of each feature point
特征点 1 2 3 特征点 1 2 3 特征点 1 2 3 特征点 1 2 3
0
引言
目前, 导弹控制系统 ( 自动驾驶仪 ) 的设计往往 是基于俯仰、 偏航和滚转通道各自独立的前提来进 一 行的。为使设计的控制系统满足工程实际需要, , 般将耦合项作为系统的随机干扰来处理 通过提高 各通道稳定裕度的方法来克服通道间的耦合对控制 系统带来的影响。 现代战争对导弹进行大机动高速等高性能飞行 的要求越来越高, 尤其在低压、 高海拔的飞行环境 中, 为了提高导弹的机动性能, 必须加大导弹的迎角 以产生足够的气动升力, 由此引起了各通道之间的
第3 期
郭广明, 等. 侧向运动耦合对导弹稳定裕度的影响
· Δω y + b 22 Δ ω y + b 24 Δ β + b 21 Δ ω x + ' 24 ·
251
作用在于表明控制系统稳定的可靠程度 。本文通过 建立小扰动线性化的耦合弹体运动数学模型 , 采用 MATLAB 中的频域性能计算工具[5], 定量分析了通 道耦合对面对称导弹相位裕度的影响 。
气动力交叉耦合 。 大迎角不仅使导弹的气动力 而且还存在严重的 和力矩呈现很强的非线性特性, [2 3 ] , 耦合现象 使导弹的控制系统成为一个非线性 强耦合的复杂多变量系统。 此外, 以三通道独立为 前提设计的控制系统将耦合项看作随机干扰还存在 明显的理论缺陷: 耦合因子的存在改变了原系统的 传递函数和动态特性, 严重时甚至会影响系统的稳 [4 ] 定性 。因此, 当导弹存在较强的耦合因素时, 以 忽略各通道间的耦合作用为前提的三通道独立设计 控制系统方法, 使控制系统的性能降低。 对导弹的控制系统而言, 稳定裕度 ( 尤其是相 位稳定裕度 ) 是其一项比较重要的性能指标, 它的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
面对称导弹侧向扰动运动动态特性仿真实验航天学院2183齐凯华2011.5.15一.实验问题描述已知某面对称导弹,以320米、秒得速度在高度为9000米的高空飞行。
在某特性点处各动力系数分别为:b11=1.86;b12=0.66;b14=6.8;b21=0.02;b22=0.20;bb24=0;b24=2.34;b36=-1;b34=0.06;a33=0;b35=-0.05;b17=-0.78;b56=0.0012;b18=-0.98;b37=0.018;b27=-0.9;但该型号的导弹在该特性点上飞行时,在外界偶然干扰或持续干扰的作用下,导弹在扰动作用结束后是沿着基准弹道继续飞行,从而击中目标,还是脱离基准弹道从而造成脱靶,这是控制导弹飞行的最基本问题,导弹稳定飞行的条件和动力系数的关系,以及导弹是否会出现副翼反逆现象都是本实验要研究讨论的问题。
二.实验要求问题:1.求在此特性点处侧向扰动运动的特征方程;由问题一的特征方程求其特征根,并讨论其稳定性;2.求在此特性点处如果受到偶然干扰作用,产生02β︒∆=,,,,x y ωωβγ∆∆∆∆的过渡过程函数,并绘出相应的曲线;3.此特性点处如果受到经常干扰'20.5( 5.3)y y M N m J =⋅=的作用,,,,x y ωωβγ∆∆∆∆的过渡过程函数,并绘出相应的曲线;4.建立以动力系数14b 和24b 为变量的侧向稳定边界条件,并绘出相应的侧向稳定便捷图;5.讨论是否会出现副翼反逆现象?如果会出现,其x δ∆要为多大?要克服“副翼反逆”现象,y δ∆的偏量方向及偏转量。
三.实验目的和意义本次实验的目的在于通过对扰动运动状态方程的求解,从而研究导弹在偶然和持续干扰作用下的的稳定性问题,求得导弹侧向状态参数的过渡过程函数,认识其随时间的变化过程。
其次,由霍尔维兹判据讨论导弹的侧向运动参数14b 和24b 所构成的区域的那一部分能是导弹稳定。
最后讨论导弹的副翼反逆现象。
实验意义:实验意义在于能从实验中得到一般得导弹动态分析的步骤,学以致用。
实验条件已知导弹的动力系数,若干扰动条件。
实验仿真设备联想z460电脑一台。
相关书籍若干。
四.实验原理和方法(包含结果)问题1首先建立导弹的侧向扰动运动方程,对侧向扰动运动方程进行简化处理,省略高阶的小项,得到导弹的侧向扰动运动状态方程:其中侧向动力系数4⨯4维矩阵xy A 为而自由扰动运动的性质取决于一下特征方程式: 43211234()G s sI A xy s s s s A A A A =-=++++;对于实验条件中不知道攻角α,可以通过公式αϑθ=-求得,而,ϑθ可以通过以下两个动力系数的意义求5633tan ,sin (9.8)g g V b a ϑθ=-=-=;通过求解特征方程,求得特征根,根据特征根的值来判断稳定性。
程序(1)的解决了这一问题,通过MATLAB 求解特征方程得到如下结果:432() 2.120 2.814 4.5780.008967G s s s s s =+++-求解上边的特征根可以得到四个特征根 :通过求解得到的四个特征值包括一对共轭复根,一个大的负实根,一个小的正实根。
分析知道一对共轭复根所决定的运动形态是二阶震荡运动,σ=-0.1083,σ<0,可以的得到震荡运动是衰减的,是稳定的。
一个大的负实根决定了稳定的衰减运动分量,一个小的正实根决定了不稳定的运动分量,但是其模值比较小,可以人为的控制。
由以上的分析知道在人为控制的基础上,导弹在该特性点上的自由扰动运动是稳定的。
问题2当扰动源是偶然的干扰时候,使导弹产生02β︒∆=,在此扰动下通过求解状态方程可以求得,,,x y ωωβγ∆∆∆∆的过渡过程函数,具体求解过过程如下:()()1()i t n H s i s X t i G s i e ⨯∆=∑⋅=,4;n =而()H s 是通过克莱姆法则得到的伴随行列式分别为()x s H ω,()ys H ω,()s H β,()s H γ,由此通过程序(2)上边的式子可以求得四个过渡过程函数和其函数图象:分析图形可知导弹在该特性点上是稳定的,所有的运动参数都收敛到0.导弹将继续沿着基准弹道前进。
问题3当扰动源是持续的干扰时候,'20.5( 5.3)y y M N m J =⋅=,在此扰动下通过求解状态方程可以求得,,,x y ωωβγ∆∆∆∆的过渡过程函数,具体求解过过程如下: ()(0)()(0)1()i i t n s H s X t y y G i G s i H e s ⨯∆=+∑⋅=,4;n =而()H s 是通过克莱姆法则得到的伴随行列式分别为()x s H ω,()ys H ω,()s H β,()s H γ,由此通过程序(3)上边的式子可以求得四个过渡过程函数和其函数图象:分析图形可知导弹在持续干扰的作用下是不稳定的,各运动参数为有限的偏差值,或者无穷发散。
建立以14b ,24b 为边界条件的稳定区域图在程序中以14b ,24b 将设为符号变量,分别求得1A ,2A ,3A ,4A 和R 相对于14b ,24b 的表达式:由1A ,2A ,3A ,4A 分别等于零可以求得稳定边界条件。
如图中的阴影区所示:问题5和问题四相同,为了判断导弹是否会出现“副翼反逆”现象,需要给导弹书如不同舵偏角度控制,看导弹的滚转方向是不是和舵偏方向相同,如果相同,说明没有,反之则有。
试验情况如图:ω∆和γ∆是同向的,因此得意得到不存在副由图可知,x翼反逆现象。
五.编程语言matlab六.程序放在“程序”文件夹里,分为程序1,程序2,程序3,程序4,程序5,分别对应实验报告中的问题。
具体实验结果将在图形窗口和结果窗口中显示。
七.程序操作手册打开程序文件夹,顺序执行程序即可。
八.实验体会通过本次试验,我对有翼导弹的动态分析原理和方法产生了更加深刻的认识,充分了解其操作过程和注意问题。
当然我对导弹的操作和稳定的原理也有了进一步的认识,从而对本科目的思想和方法产生粗略的理解。
当然在编程过程中更加了解编程语言及其操作过程。
这次试验让我受益匪浅。
希望以后多多参加这种试验。
附:源程序语言问题1:cleardigits(4)syms s tg=9.8;%常量V=320;H=9000;ALPHA=0;%纵向参数,AIPHA未知b11=1.86;b12=0.66;b14=6.8;b21=0.02;b22=0.2;bb24=0;b24 =2.34;b36=-1;b34=0.06;a33=0;b35=-0.05;b17=-0.78;b56=0.0012;b18=-0.98;b37=0.018;b27=-0.9;%动力系数ALPHA=atan(-b56)-asin(-a33*V/g);Axy=[-b11, -b12, -b14, 0;-(b21+bb24*ALPHA),-(b22-bb24*b36+bb24*b56*ALPHA), -(b24-bb24*b34-bb24*a33), bb24*b35;ALPHA, -(b36-ALPHA*b56), -(b34+a33), -b35;1, b56, 0, 0];Axy;G=s.*eye(4)-Axy;vpa(G);Gs=vpa(det(s.*eye(4)-Axy))%得到问题1结果S=solve(Gs);GENZHI=vpa(S)%得到问题2结果问题2bta=2*pi/180;R=[0;0;bta;0];%方程右端项Hwx=det([R,G(:,2),G(:,3),G(:,4)]);Hwy=det([G(:,1),R,G(:,3),G(:,4)]);Hbita=det([G(:,1),G(:,2),R,G(:,4)]);Hgama=det([G(:,1),G(:,2),G(:,3),R]);%求得对应的伴随行列式wfGs=diff(Gs,s);%求得G是的微分Wx=Hwx/wfGs*exp(s*t);Wy=Hwy/wfGs*exp(s*t);bita=Hbita/wfGs*exp(s*t);gama=Hgama/wfGs*exp(s*t);Wxs=subs(Wx,s,S);Wxt=vpa(Wxs(1)+Wxs(2)+Wxs(3)+Wxs(4))%得到Wx的过渡过程函数Wys=subs(Wy,s,S);Wyt=vpa(Wys(1)+Wys(2)+Wys(3)+Wys(4))%得到Wy的过渡过程函数bitas=subs(bita,s,S);bitat=vpa(bitas(1)+bitas(2)+bitas(3)+bitas(4))%得到bita的过渡过程函数gamas=subs(gama,s,S);gamat=vpa(gamas(1)+gamas(2)+gamas(3)+gamas(4))%得到gama的过渡过程函数a=0:0.005:50;%画图程序plot(a,180/pi*subs(Wxt,t,a));figure(1)xlabel('t(s)')ylabel('ΔWx(度/s)')title('ΔWx过渡过程函数')grid onfigure(2)plot(a,180/pi*subs(Wyt,t,a),'r');xlabel('t(s)')ylabel('ΔWy(度/s)')title('ΔWy过渡过程函数')grid onfigure(3)plot(a,180/pi*subs(bitat,t,a),'m'); xlabel('t(s)')ylabel('偏航角Δβ(度)')title('Δβ过渡过程函数')grid onfigure(4)plot(a,180/pi*subs(gamat,t,a),'g'); xlabel('t(s)')ylabel('Δγ(度)')title('Δγ过渡过程函数')grid on问题3:My=20.5/5.3;H1=G;H2=G;H3=G;H4=G;H1(:,1)=[];H1(2,:)=[];H2(:,2)=[];H2(2,:)=[];H3(:,3)=[];H3(2,:)=[];H4(:,4)=[];H4(2,:)=[];HT1=vpa(-det(H1))HT2=vpa(det(H2))HT3=vpa(-det(H3))HT4=vpa(det(H4))Wx1=HT1/wfGs*exp(s*t)*My/s;Wy1=HT2/wfGs*exp(s*t)*My/s;bita1=HT3/wfGs*exp(s*t)*My/s;gama1=HT4/wfGs*exp(s*t)*My/s;Wxs1=subs(Wx1,s,S);Wxt1=vpa(subs(HT1/Gs*My,s,0)+Wxs1(1)+Wxs1(2)+Wxs1 (3)+Wxs1(4));%得到Wx的过渡过程函数Wys1=subs(Wy1,s,S);Wyt1=vpa(subs(HT2/Gs*My,s,0)+Wys1(1)+Wys1(2)+Wys1 (3)+Wys1(4));%得到Wy的过渡过程函数bitas1=subs(bita1,s,S);bitat1=vpa(subs(HT3/Gs*My,s,0)+bitas1(1)+bitas1(2)+bitas 1(3)+bitas1(4));%到bita的过渡过程函数gamas1=subs(gama1,s,S);gamat1=vpa(subs(HT4/Gs*My,s,0)+gamas1(1)+gamas1(2)+ gamas1(3)+gamas1(4));%得到gama的过渡过程函数a=0:0.02:50;%画图程序figure(1)plot(a,180/pi*subs(Wxt1,t,a));xlabel('t(s)')ylabel('ΔWx(度/s)')title('ΔWx过渡过程函数')axis([0 30 -600 50])grid onfigure(2)plot(a,180/pi*subs(Wyt1,t,a),'r');xlabel('t(s)')ylabel('ΔWy(度/s)')title('ΔWy过渡过程函数')axis([0 30 -200 500])grid onfigure(3)plot(a,180/pi*subs(bitat1,t,a),'m');xlabel('t(s)')ylabel('偏航角Δβ(度)')title('Δβ过渡过程函数')axis([0 30 -10 180])grid onfigure(4)plot(a,180/pi*subs(gamat1,t,a),'g');xlabel('t(s)')ylabel('Δγ(度)')title('Δγ过渡过程函数')axis([0 5 -1500 50])grid on问题4:syms b14 b24Axy=[-b11, -b12, -b14, 0;-(b21+bb24*ALPHA), -(b22-bb24*b36+bb24*b56*ALPHA), -(b24-bb24*b34-bb24*a33), bb24*b35;ALPHA, -(b36-ALPHA*b56), -(b34+a33), -b35;1, b56, 0, 0];Gs1=collect(vpa(det(s.*eye(4)-Axy)))%求得G(S)相对于b14和b24的多项式A1=2.120;A2=-0.1200e-2*b14+0.4824+1.000*b24;A3=0.2153e-1+.2976e-1*b14+1.861*b24;A4=0.9999e-2*b14-0.3289e-1*b24;%多项式系数 R=A1*A2*A3-A1^2*A4-A3^2;%画图ezplot(A2,[-1 7 -1 2])hold onezplot(A3,[-1 7 -1 2])ezplot(A4,[-1 7 -1 2])ezplot(R,[-1 7 -1 2])xlabel('b14')ylabel('b24')title('侧向稳定边界图')text(5,-0.6,'A2=0')text(3,-0.2,'A3=0')text(3,1.2,'A4=0')text(5,0.2,'R=0')grid on问题5:for sigemax=5:10:15;Q=-b18*sigemaxH1=G;H2=G;H3=G;H4=G;H1(:,1)=[];H1(1,:)=[];H2(:,2)=[];H2(1,:)=[];H3(:,3)=[];H3(1,:)=[];H4(:,4)=[];H4(1,:)=[];HT1=det(H1)HT2=-det(H2);HT3=det(H3);HT4=-det(H4);Wx1=HT1/wfGs*exp(s*t)*Q/s;Wy1=HT2/wfGs*exp(s*t)*Q/s;bita1=HT3/wfGs*exp(s*t)*Q/s;gama1=HT4/wfGs*exp(s*t)*Q/s;Wxs1=subs(Wx1,s,S);Wxt1=vpa(subs(HT1/Gs*Q,s,0)+Wxs1(1)+Wxs1(2)+Wxs1( 3)+Wxs1(4))%得到Wx的过渡过程函数Wys1=subs(Wy1,s,S);Wyt1=vpa(subs(HT2/Gs*Q,s,0)+Wys1(1)+Wys1(2)+Wys1( 3)+Wys1(4))%得到Wy的过渡过程函数bitas1=subs(bita1,s,S);bitat1=vpa(subs(HT3/Gs*Q,s,0)+bitas1(1)+bitas1(2)+bitas1( 3)+bitas1(4))%得到bita的过渡过程函数gamas1=subs(gama1,s,S);gamat1=vpa(subs(HT4/Gs*Q,s,0)+gamas1(1)+gamas1(2)+g amas1(3)+gamas1(4))%得到gama的过渡过程函数a=0:0.02:50;%画图hold onplot(a,subs(Wxt1,t,a));plot(a,subs(gamat1,t,a),'r')endlegend('ΔWx','Δγ',2)xlabel('t(s)')ylabel('ΔWx(度/s),Δγ(度)')text(1.2,2,'δz=5°')text(1.6,7,'δz=15°')axis([0 2 -1 10])hold offgrid on。