云台设计参考
基于Hi3515处理器的智能云台系统的设计
a d c in y tm . h o e s s m sf xbL d sg e n a u b e frma k t n l ts se T e wh l y t i l i ] e in d a d v l a l o r e . e e e y
Ke r y wo ds: ARM ; 3 5 p o e s r e e e n x; 4 5 b ; Z ne a e Hi51 r c s o ; mb dd d Li u RS 8 us i tr c f
=UART NR ,
—
.
=AM BA CONS OLE ,
—
抗干扰能力强 , 适合远距离传输 , 很好地满足了云台
控 制 的要 求 . 2 中 电平 转 换 电 路 使 用 的 芯 片 为 图
MA I 公 司的 MA 3 9 。 XM X 4 1
} ;
sa i t c mb d i e l 1 t t sm ta a rv rp O1 c
L U i g, I M n WAN G Ch o, a ZHANG e g M n
( o Cl o l t ncSi c n ier g,otes U i rt, af g2 09 C ia fEe r i c nea dE nei Suhat nv sy N n n 106,hn ) co e n ei i
高性 能高集 成通 信媒 体 SC处 理器 。A M96 J S o R 2E — 处理 频 率 达 40 z 能 够 满 足 客 户 日益 增 长 的 0 MH , D R、 V 、 a ea软 件及 其他 嵌 入式 应 用需 求 : V D SI Cm r P 20 0 MHz D R D A 接 口能够 提供充 足 的数据 的 D 2S R M
无人机云台的设计与研究

技术创新19无人机云台的设计与研究◊哈尔滨市德强高中部翟昱博哈尔滨理工大学机械动力工程学院郝广平云台作为一种相机稳 定器,能在拍摄尤其是航 拍过程中起到平衡与稳定 的作用。
航拍是无人机技 术中非常重要的一部分,由于无人机本身在飞行过 程中的抖动会对图像采集 产生极大的影响,因此设 计好无人机的云台设备,让无人机可以获取清晰的 图像信息是非常必要的。
航拍是无人机技术中比较重要的一^ 功能,通过对相关环境中的图像摄取,可 以帮助无人机使用者获得重要的信息资 源,不管是在军事行动还是在电力设备维 护运用中,航拍都发挥着极其重要的作 用,是无人机技术中不可忽视的一部分,通过空中拍摄,使用者可以用视域更加宽 广、全面的俯视角度来观察地面的信息,这有助于其更准确的找出其中的问题,同时也极大缩减了拍摄时间,提升了效率。
1云台设计要求无人机航拍最大的问题来自于抖动,在拍摄时其镜头的抖动是全方位、全频段 的,这极大影响了图像信息的质量。
形成 抖动的原因主要有三个方面,一是无人机 自身的螺旋桨高频运动从而影响到整个机 身的振动。
二是飞行过程中形成的风阻外 力影响,且无人机自身的外形设计以及飞 行时的运动轨迹,飞行的速度都会加大风 阻的力量,产生更大的抖动能量。
三是无 人机在做出规定动作的时候会让飞行姿态 发生改变,如无人机在水平向前的状态下 做出前俯动作,那么齒飞停止刹那间无 人机会做出后仰动作来消除向前的惯性,親会对摄像■带来腹方向的扰动。
因此,云台的设计要求和设计思路都需要 围绕“隔离扰动,稳定视轴”这个方向来 进行' 设计师在设计无人机的云台时要 确保其能搭载多种传感器和光学精密仪 器,保证其在高速移动或者转向的情况下 依然能做到稳定拍摄,防止画面出现横 纹、断层现象甚至偏离拍摄目标。
就目前 的现状而言,当前市面上的无人机大都是 消费级,其摄影设备难以满足航拍所需要的高强细节图片需求,因此槪人机财的摄像设计上需要作出更好、更完善的改变,以此才能满足诸如民用航拍、地形测绘、反恐侦察、目标跟踪识别等用途。
自由度云台结构设计
仿真式多自由度云台构造设计目录摘要 (1)前言 (2)第一章绪论 (3)第二章产品的技术指标和技术参数 (4)第一节数控云台的技术指标 (4)第二节可行性论证及技术经济分析 (4)第三章云台总体方案的设计 (5)第一节云台设计方案的提出 (5)第二节云台设计方案的论述 (5)第四章机械局部的设计 (7)第一节步进电机的选用 (7)第二节减速机构传动系统设计 (9)第三节轴的设计 (14)第四节轴承的设计 (15)第五章总结 (18)第六章外文翻译 (19)附录一英文文献翻译 (19)附录二英文文献原文 (23)第七章参考资料 (32)摘要:本次毕业设计是设计闭路电视监控系统中的前端设备——数控云台,此设计根据数控云台的工作环境、机械指标、设计参数和主要技术要求,采用室智能球型云台。
球型外壳能减少灰尘及各种干扰,日常维护方便,可到达隐蔽监视的目的,云台在水平方向可连续350无级变速扫描,并设有设置摄像点的功能。
本设计介绍了数控云台的传动原理、构造特点和功能,并对步进电机的特点作了简单的介绍。
关键词:闭路电视系统数控云台步进电机ABSTRACT:This graduation project is to design a numerical control (NC) sputnik of the closed-circuit video tape system.The project based on the work condition's、the mechanical guideline、the design parameter and the primary technical acquirements.The intellectual spherical sputnik for ind oor was applied to the project.The spherical husk can reduce dust and all kinds of disturb,it is easy to maintain,it can spy in hidden place.In horizon,it can successively scan a round in sleepless timing,and have the function of Preset Positions.The project introduce drugging principle construction features a nd the function of NC sputnik.It simply introduce repeating motor.KEYWORDS:Closed-circuit videotape system, Numerical control sputnik, stepping motor前言随着科学技术的不断开展,人们已经不满足于通信,对信息传输的要求,不但要求听到对方的声音,更希望看到对方的形象,而且还要看到对方活动的现场。
基于单片机的遥控无极变速电动云台设计
右
云 台控 制 装厦
改 变 电 动 机 的 转 动 方 向 , 常 采 用 图 3的 H 型驱 动 电 通
路来 实现 , 当三 极管 Q 与 Q , 饱 和导 通 时 , 流 电动 直 机 电枢 正 向导 电 , 电动机 正转 ; 当三极 管 Q 与 Q 饱
图 1 电动 云 台遥 控 操 作 装 置 示 意 图
视 对象 实现 运 程 监 控 ( 图 1 。但 目前 电 动 云 台上 的 电 动 如 ) 机是 陀 机 , 机 接 受 遥 控 接 收 器 的 信 号 转 动 从 而 控 制 云 台 上 陀
的相 机 的水 平 位 置 与 旋 转 的角 度 , 陀 机 并 不 能 根 据 遥 控 器 但 的操 作 手 杆 的位 置 来 改 变 转 速 , 的 转 速 是 恒 定 的 , 即 相 它 也 机 的位 置 变 化 是 一 个 固定 的速 度 变 化 。在 实 际拍 摄 时 , 望 希 相 机 既 能 够 快 速 的跟 踪 一 个 物 体 又 能 缓 慢 的转 动 拍 摄 一 个 连 续 的 画 面 , 然 , 过 陀 机 去 进 行 云 台 的 控 制 并 不 能 满 足 显 通 要 求 。 作 者 利 用 单 片 机 与 直 流 电动 机 调 速 技 术 设 计 出 一 种 无 极 变 速 电 动 云 台 , 过 遥 控 器 来 改 变 电动 云 台 直 流 电 动 机 通
收 稿 日 期 :2 1 —0 —2 00 4 9
作 者 简介 : 存 学 (9 2一) 男 , 北 随 州人 , 汉 大 学 文 理 学 院机 电 与 建 筑 工 程 学部 讲 师 , 姜 17 , 湖 江 主要 从 事 机 械 电 子 技 术 的 教 学与 研 究 。
基于AVR单片机的电动云台控制器设计
基于AVR单片机的电动云台控制器设计
电动云台是一种用于摄影、舞台灯光以及监控等领域的设备,它能够实现云台的旋转和倾斜,从而实现摄影机或其他设备的远程控制。
为了实现对电动云台的精确控制,本文设计了一种基于AVR单片机的电动云台控制器。
首先,本文选用了AVR单片机作为控制芯片。
AVR单片机具有功耗低、成本低以及易于编程等优势,非常适合作为电动云台控制器的核心芯片。
其次,本文设计了电动云台的控制电路。
该电路包括电机驱动模块、编码器模块以及传感器模块等。
电机驱动模块用于控制电动云台的旋转和倾斜,编码器模块用于测量电动云台的角度,传感器模块用于获取环境信息,如温度、湿度等。
在软件设计方面,本文采用了嵌入式C语言进行编程。
首先,通过编程将AVR单片机与各个模块进行连接,实现数据的传输和控制信号的输出。
其次,设计了电动云台的控制算法。
通过计算电动云台的角度和目标角度之间的差值,控制电机驱动模块的输出,从而实现对电动云台的精确控制。
最后,本文还设计了用户界面,用户可以通过界面输入目标角度,并实时监测电动云台的运动状态。
为了验证设计的有效性,本文进行了实验。
实验结果表明,基于AVR单片机的电动云台控制器能够实现对电动云台的精确控制。
无论是旋转还是倾斜,电动云台都能够按照设定的角度进行运动,并且能够快速响应用户的操作指令。
综上所述,本文设计了一种基于AVR单片机的电动云台控制器。
通过合理的硬件设计和软件编程,实现了对电动云台的精确控制。
这种控制器具有功耗低、成本低以及易于编程等优势,有望在摄影、舞台灯光以及监控等领域得到广泛应用。
DIY 业余卫星自动追踪云台
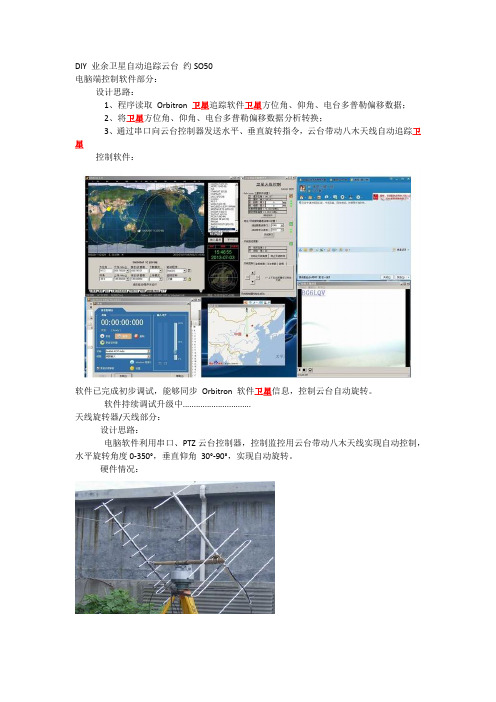
DIY 业余卫星自动追踪云台约SO50电脑端控制软件部分:设计思路:1、程序读取Orbitron 卫星追踪软件卫星方位角、仰角、电台多普勒偏移数据;2、将卫星方位角、仰角、电台多普勒偏移数据分析转换;3、通过串口向云台控制器发送水平、垂直旋转指令,云台带动八木天线自动追踪卫星控制软件:软件已完成初步调试,能够同步Orbitron 软件卫星信息,控制云台自动旋转。
软件持续调试升级中...............................天线旋转器/天线部分:设计思路:电脑软件利用串口、PTZ云台控制器,控制监控用云台带动八木天线实现自动控制,水平旋转角度0-350°,垂直仰角30°-90°,实现自动旋转。
硬件情况:已安装V段5单元U段10单元八木天线,调试中........................自制仰角量角器,调试云台:硬件连接详细内容请看30楼控制软件测试版下载请到33楼调试结果:1、145.825 Mhz 抄收ISS APRS 信号,经 AGW Packet Engine 软件解码成功,AGWTracker 显示:2、SO50 成功与BG7MNV、BG6LQV QSO3、手台抄收NOAA19 卫星云图业余卫星网站:【业余卫星过境在线查询】/amsat-new/tools/predict/index.php 【查询、提交业余卫星运行状态】/【ISS 爱好者俱乐部】/【ISS SSTV 计划】/【在线地图经纬度查询】/maps.htm业余卫星通讯QQ交流群:【287540660】软件控制部分编写说明:云台串口控制协议:FT8X7系列电台多普勒偏移自动控制方法:【没有此电台,软件未开发此功能,仅供参考】测试数据:因自制U段八木效果太差,正在淘宝购买成品八木,U段效果没有测试.............V段五单元八木10米馈线连接手台测试:1、NOAA 气象卫星发射功率较大,讯号强度高,卫星仰角》30°时,手台抄收讯号强度59,但手台无法解析数据。
简易拍摄云台设计方案

简易拍摄云台设计方案
设计方案如下:
1. 云台结构设计
- 云台主体采用金属材料制造,具有一定的稳定性和承重能力。
- 云台顶部设有相机固定装置,可以固定各种大小型号的相机。
- 云台底部采用球面连接装置,可以实现全方位的旋转和倾斜角度调节。
2. 云台控制系统设计
- 云台内部集成高精度的电机和传感器,可以精确控制云台的运动。
- 云台控制系统采用无线遥控方式,使用者可以通过遥控器调节云台的角度和运动速度。
- 云台还可以配备APP控制,使用者可以通过手机APP进行更加灵活的操作和控制。
3. 云台稳定性设计
- 云台底部设有防滑垫,可以增加云台与支架的摩擦力,提高稳定性。
- 云台内部设有防震装置,可以减少相机拍摄时的震动,保证画面的清晰度。
- 云台底部设有平衡调节装置,可以根据相机的重量和大小进行调节,保证云台的平衡状态。
4. 云台电源设计
- 云台可以使用可充电电池供电,方便室外拍摄和移动使用。
- 云台底部配备电池仓,可以容纳多节电池,延长使用时间。
- 云台还可以通过电源适配器直接接入交流电源,保证长时
间拍摄的稳定供电。
以上是一个简易的拍摄云台设计方案,可以根据实际需求和市场需求进行进一步的改进和优化。
一种新颖的“水托”形声纳云台设计
A b s t r a c t : A Z/ s n e c e s s a r y f o r e x p nd a i n g t h e d e t e c t i o n r a n g e o ft h e F o r w a r d L o o k i n g S o n r a t o e n  ̄l e i t t o s w i n g a t a c e r t a i n
机 械 设 计 与 制 造
Ma c h i n e r y De s i g n & Ma nu f a c t u r e
第 5期 2 0 1 3 年 5月
一
种新颖的“ 水托 ” 形声纳云 台设计
i加 善 , 卫
( 上海大学 机电工程与 自动化学院 , 上海 2 0 0 0 7 2 )
托” 时声纳的水阻力模拟结果与计算结果基本一致 , 当声纳处于“ 水托” 中时 , 其受到的水 阻力大大减小 , 消除了无人测量
艇调遣时声纳受到的水阻力给传动装置带来的 负面影响。
关键 词 : 海 洋测 量 ; 声纳云台; 水托 ; 水 阻力 ; 数值 模 拟 中 图分 类号 : T H1 6 ; U 6 6 6 . 7 文 献标 识 码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 5 — 0 0 4 6 — 0 3
e l i mi n a t e s t h e e f f e c t s o n t h e t r a n s mi s s i o n w h e n t h e c u t t e r s a i l s a t 。h i g h s p e e d .
t h e s o n r a b e rs a a l rg a e h y d r a u l i c r e s i s t a n c e , w h i c h l e d u p t o t h e T r ns a mi ss i o n c a n n o t me e t t h e d e s i g n r e q u i r e me n t s . Ba s e d o n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:为了解决天线随动系统所存在的振颤现象和全数字化实现等问题,介绍了一种基于加速度回路的全数字化天线随动系统控制器,该系统以DSP芯片TMS320F2812为核心控制芯片,采用速率陀螺平台稳定系统、数字PID控制算法和脉宽调制驱动方式,通过引入加速度回路抑制系统的高频振荡,极大地改善了系统的稳定性和动态品质,具有极高的应用价值。
关键词:加速度回路;天线随动系统;平台稳定系统;PID;脉宽调制0 引言随动系统亦称为伺服系统,其广泛应用于卫星通信、自动驾驶仪、天线位置控制、导弹和飞船的制导等各个领域。
在导弹制导领域中,随动系统的应用极其重要,其涉及到目标准确跟踪、制导精度、作战性能等关键因素,随动系统控制器作为整个导弹制导系统的核心,其性能好坏直接影响着系统的整体性能。
文献提出导引头随动控制系统设计方案,通过理论分析和仿真验证表明,这种随动系统具有较好的搜索和跟踪性能。
但是,在实际应用中,由于高频振荡的存在,对随动系统的高跟踪精度和整体性能影响较大。
针对这种问题,本文从天线随动系统的控制方案出发,以实现随动系统的快速动态响应特性、高质量的稳态精度和较强的非线性干扰能力为目的,通过仿真详细分析了随动系统的各种功能特性。
巧用速度微分即加速度负反馈的方法,引入加速度反馈回路,增加系统阻尼,在减小超调的同时,抑制尖峰干扰,极大地提高了天线随动系统的整体性能。
1 系统结构及工作原理本系统设计采用内外双框架结构,内框架为俯仰框架,外框架为方位框架。
内外框架均安装有直流力矩电机、测角电位计和速率陀螺,由它们共同实现天线的方位和俯仰运动。
系统结构如图1所示。
控制系统由测角电位计、速率陀螺、A/D电路、DSP控制器、PWM功率驱动电路、直流力矩电机构成。
A/D电路将电位计和速率陀螺输出的模拟信号转换为数字信号,被动雷达接收机作为测角装置给出误差角度信号,在DSP控制器中完成PID控制算法,并给出PWM信号,再经PWM功率驱动电路驱动直流力矩电机,从而完成对天线的全数字化控制。
2 系统设计与仿真2.1 系统控制原理框图本系统所采用的是速率陀螺稳定平台式天线随动跟踪系统方案,从原理上说,可称为“平台式随动系统”,它既能隔离载体角运动对天线电轴的铰链,又能使天线电轴快速准确地跟踪视线,并且当被动雷达接收机停止工作时,天线电轴能保持在导航坐标系总的指向稳定不变。
该方案的控制原理框图以及各个角度之间的关系如图2所示。
图2中,q为导航系的视线角;e为导航系的误差角;ψ,分别为载体的姿态角和角速度;为载体轴与天线电轴之间的夹角及其角速度;uT,uυ分别为被动雷达接收机、角位置传感器经过放大器KT,Kf的输出电压,它们都要输给载体控制系统;ηg为角速率陀螺仪的漂移;为被动雷达接收机(测向装置)的传递函数,τD为测角延迟时间;GPID(s)为PID调节器传递函数,Gc(s)为校正装置传递函数,其作用为增大系统带宽,提高系统解耦性能,同时超前网络校正环节可以改善系统的υ和uT的输出,减弱输出产生的纹波;Gd(s)为伺服电机减速器及负载的传递函数;Gg(s)为角速率陀螺仪的传递函数,各传递函数表达式如下:Kυ,Kw分别为角位置传感器的PWM驱动传递系数;Kz,Kc1,Kc2,Kf,KT分别为电子放大器的放大系数。
K1,K2为两个开关。
当被动雷达接收机开机时,K1,K2同时接通,扫描信号通过K1驱动随动系统,对目标进行搜索;当被动雷达截获目标后,K1,K2同时断开,雷达天线在随动系统驱动下转入对目标跟踪状态,根据被动雷达接收机给出的实时误差角度信号实现对目标的稳定跟踪。
从图2中可以看出,天线随动系统由内至外分别由角加速度反馈回路、角速度反馈回路、角位置反馈回路三个闭环反馈控制回路组成。
其中,角加速度回路由PWM驱动、力矩电机、角速率陀螺、微分环节、角加速度反馈放大环节构成,采用对角速率陀螺输出信号微分得到角加速度信号。
角速度回路由PID控制器、PWM驱动、力矩电机、角速率陀螺、角速度反馈放大环节构成。
角位置回路由测向装置、前置放大器、校正环节和角速度反馈回路连接构成。
2.2 天线随动系统性能分析本设计通过对各回路元件的理论模型和非线性进行仿真分析,调整相关参数,使其能够达到系统的性能要求,并将仿真得到的相关参数作为软硬件实现的依据。
2.2.1 输出特性根据线性系统叠加性原理,将图2系统分解为单输入单输出系统进行分析,当q,ψ,ηg 同时输入到系统时,可得系统的稳态输出特性为:等号右边第一项为随动系统输出到载体控制系统的导引信号,是与视线角速度成正比例的信号;第二项是载体角运动的铰链输出,对载体的控制性能产生了影响;第三项是角速度陀螺仪的漂移造成的干扰输出,将它输入载体控制系统,会造成导引误差,因此要选择漂移小的角速度陀螺仪。
图3给出了当输入q=1(t),ψ=0时,输出υ(t)和uT(t)的曲线。
从图中可见,曲线连续平滑,稳态性能较好,并且能够较好地实现的比例导引规律。
2.2.2 解耦特性系统的解耦特性主要研究载体角运动及角速度陀螺仪的漂移对天线电轴在导航坐标系统中的位置影响。
因此,要分析以ψ,ηg为输入时,对υ的影响。
当以ψ为输入,υ稳态输出特性为:由式(6)可知,载体角运动对天线电轴在导航系统中的稳态位置无铰链,系统各元件参数变化都不会影响天线电轴在导航系统中位置。
说明该系统具有全解耦功能。
2.2.3 抗关机特性抗关机特性主要研究当目标雷达关机后,载体角运动、角速度陀螺仪的漂移对天线电轴在导航系的位置的影响。
由式(7)可知,当目标雷达关机后,载体角运动不影响天线电轴在导航系统中的位置,能保持目标雷达关机前的指向不变。
由式(8)可知,在目标雷达关机后,天线电轴在导航系统中的漂移与角速度陀螺仪的漂移大小相等,方向相反。
所以角速度陀螺仪的漂移影响天线抗关机性能,需根据载体在目标雷达关机后需飞行的最长时间来选择角速度陀螺仪的漂移特性。
2.2.4 搜索特性搜索特性分析是指当随动系统在搜索状态下,以R。
(t)和(t)为输入,υ(t)为输出时的特性。
其稳态输出特性为:由此可知,雷达天线能按照给定的信号,在方位和俯仰面上进行要求方式的扫描,扫描的范围由Rs(t)的幅值控制。
但由于扫描时,υ与成比例,故在扫描时载体角速度不能太大,否则天线电轴会丢失目标。
2.2.5 跟踪特性图4给出了当输入q=20t,ψ=0时,输出υ(t)的仿真曲线。
它表明,当输入20°/s的角速度信号时,跟踪回路能较好地复现系统的输入信号,即电轴可以稳定跟踪视线角,实现高精度跟踪。
同时可以看出,υ的输出在过零点时,特性良好,无死区现象。
2.2.6 引入加速度回路特性在天线随动系统中增加的角加速度负反馈回路,不但可以用于抑制系统的高频振荡,解决随动系统的颤振问题,而且能克服惯性平台的“航向效应”,提高了电机参数的鲁棒性,使平台式随动系统的性能更加可靠。
图5给出了输入标准差为σi=0.33时,取Kc2=1.2,加速度回路起反馈作用,输出标准差σo=0.21。
它表明天线随动系统的υ角度输出得到平滑。
取Kc2=0,加速度回路不起反馈作用时,输出标准差σo= 0.23。
可见,加入加速度反馈回路可以进一步降低υ的输出振荡。
3 系统实现3.1 系统硬件实现本系统是采用以DSP为核心控制芯片的数字控制系统,通过天线随动系统,对采取的控制方案的性能进行实测验证。
考虑到在天线随动系统中,天线的负载大,扰动负载力矩较大,系统选用永磁式直流力矩电机,它是一种低转速、大力矩的直流电动机,可以直接带动低速负载和大转矩负载,具有转速和转矩波动小,机械特性和调节特性线性度好等优点,根据给定的参数,选取力矩电机的堵转转矩为3.7 N·m,电气时延为T≤0.93 ms。
测角电位计选用精密塑料电位计MidoriCPP-35型,有效电气角为340°,速率陀螺选用单自由度液浮陀螺JST-1,它具有漂移小,零位及重复性好,频率宽的特点。
随动系统控制器的硬件结构主要包括A/D采样电路模块、DSP和FPGA控制电路模块、PWM 功率驱动电路、SCI串口通信电路、供电电源等模块。
系统硬件结构如图6所示。
系统以TI公司生产的TMS320F2812芯片为核心处理器,主要完成速率陀螺模拟信号采集、电位计模拟信号采集、PWM信号产生、数字PID控制算法、搜索回路算法、跟踪回路算法、与上位机的RS 422接口串行通信的实现以及系统工作状态的转换等功能。
系统选取Cyclone系列的EP1C6T144FPGA芯片来实现对DSP和ADS8364各个功能引脚逻辑的灵活控制。
作为系统前端数据采集的核心,选取TI公司的ADS8364芯片完成速率陀螺和电位计的信号采集工作。
此外,为了保证信号的稳定性,在A/D前端加入射频电路芯片LM310。
系统采用PWM工作方式驱动直流力矩电机,由TMS320F2812产生PWM控制波形,然后由PWM 功放MSK4201进行功率驱动,产生力矩电机所需要的驱动电流。
MSK4201是一款完整的H桥电路,它可以用来驱动DC有刷电机或作为D类开关放大器,所有的高低驱动控制电路在内部集成,用户提供TTL兼容PWM信号,同时振幅和方向控制四象限模式,内部驱动电路提供适当的死区时间来保护每个半桥,全N沟道场效应管意味着两方面的阻力和交换能力效率的最佳模式。
同时,为了保证PWM驱动电路与DSP电路的之间的干扰减至最小,在系统设计中,采用光耦隔离芯片6N137将二者隔离。
系统与上位机的通信采取异步串行通信方式,RS 422接口芯片采用DS8921。
同时采用SN74ALVTHl6245芯片避免回流,提高数据传输的稳定性。
3.2 系统软件实现本系统采用数字PID控制算法,由TMS320F2812的事件管理器(EV)产生周期为0.1 ms的PWM波形信号,同时采用CPU定时器以1 ms的控制周期,控制驱动力矩电机实现天线转动。
系统首先对DSP内部时钟模块、PIE模块、SCI模块、事件管理器等模块进行初始化,之后启动SCI 模块,通过指定的通信协议,等待接收上位机的命令。
当上位机发出启动伺服命令后,电机上电,控制天线保持零位电锁状态;当上位机发出搜索命令时,进入搜索回路子程序,天线从零点开始进行步进式搜索,当被动雷达天线发现到目标后,程序切换到跟踪回路子程序,由雷达数字接收机给定实时误差角信号,使天线进入目标跟踪状态。
若目标丢失,则天线立即切换到搜索状态重新进行目标搜索。
天线随动系统控制器的主流程图如图7所示。
4 实验结果分析实验以方位通道为例,对天线转动过程中的电位计采样数据整理分析如下,图8为角加速度回路引入系统前后对比曲线,通过比较可知,二者均是天线由0°转到20°的数据曲线,响应速度快、动态性能较好,没有明显的超调现象,总体输出良好。