基于组态软件的伺服电机监控系统的设计
基于组态软件的煤矿井下变电所监控系统设计
一… …
… ‘ I .— j =
RS 48 一 5
费用 。现在设备进行 了升级 , 变成 了低压馈 电开关和 高压隔爆真空配 电装置 ,监控方式沿用 了以前人工
看护的方式 ,行 的状态 。
开关 1
开关 l
开关 N
泛 应用 , 一般 都 进 行 了二 次 封 装 , 所谓 二次 封 装是 指 各 个 厂 商 加 入 了 自己 的通 讯 规 约 。 内容 基 本 上 是 : R一8 S 4 5的地 址 、 传输 方式 、 据 内容 、 数 校验 码等 , 比如
时监 视井 下设 备状 态 。
4 软件设计
变( ) 配 电工 2h看 护 , 4 投人 了很 多人 工 和 维 护 调试
RS— 8 45
… …
- —i
T PI C/ P
门
… … … .
w I 1 Ⅱ t “
『=: T / 『 =l CI = = P = P
,
1 _ J
广光 … 纤 I
L. ~ … J
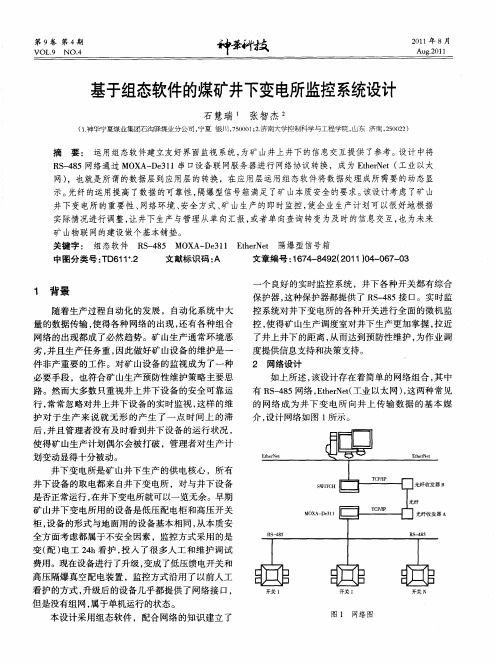
本设计采用组态软件 ,配合网络 的知识建立 了
图 1 网络 图
‘
6 ‘ 8
石 慧瑞等 : 于组态软件 的煤矿井下变电所监控 系统设计 基
第 4期
R 一 8 是一种国际传输标准 , S45 传输距离 10m, 20
两条线产生高低 电平 “” 0 或者“ ”将 想要 的信息 变 l, 化成数字量。由于采用高低 电平的电位差向前传输 , 所以有传输稳定 , 传输距离长的特点。在 自动化 中广
使得矿山生产计划偶尔会被打破 ,管理者对生产计 划变动显得十分被动。 井下变电所是矿山井下生产的供 电核心 ,所有 井下设备 的取电都来 自 井下变电所 ,对与井下设备 是 否正 常运 行 , 在井 下变 电所 就可 以一 览无 余 。早 期 矿 山井 下变 电所用 的设备是低压配 电柜和高压开关 柜, 设备 的形式与地面用的设备基本相 同, 从本质安 全方面考虑都属于不安全 因素 ,监控方 式采用 的是
基于PLC与HMI的伺服电机运动控制系统设计与实现

基于PLC与HMI的伺服电机运动控制系统设计与实现摘要:随着计算机技术、可编程控制器及触摸屏科技的进步,现在机械制造行业几种控制系统越来越多的被应用到处理复杂事务中使其变得处理简易,在生活中,几种控制系统的应用提高了生产效率,使我们生活变得简单化,提高了机械产品的安全性和可操作性。
本文提出了选用S7-200SMARTCPUST30PLC为主控制器,发送脉冲指令作为伺服驱动器的输入信号,通过伺服驱动器实现对伺服电机前/后点动及连续运转、相对/绝对位置的精确控制以及自动查找参考点等操作,由SMART1000IEV3触摸屏搭建监控画面的思路。
关键词:伺服电机;PLC;运动控制;HMI1、系统总体方案设计1.1PLC和HMI简介1.1.1可编程里辑控制器简介可编辑逻辑控制器简称PLC,能够适应工作环境较为恶劣的条件,适用范围较广。
另外,PLC的维护较为方便,使用可靠性比较高。
CPU的运行状态是决定系统流畅的重要保证,而PLC的工作状态就是通过软件控制CPU的运行情况,当然通过硬件开关进行强制控制也是一种有效的控制手段,比如在进行测试阶段或者对系统进行检修时,硬件控制是一种较为方便的方式。
1.1.2 HMI简介随着我国工业水平提高,在生产过程中生产工艺越来越复杂,生产设备也在不断更新换代,生产控制人员不仅仅要对生产的每个流程熟知,还要对设备运行状况了解,做到设备运转的透明化。
HMI便是实现人机互通的关键技术,它实现了工作人员与机器之间的可靠连接。
在工作人员与Wincc flexible之间,HMI是实现二者链接的重要接口。
在控制器与Wincc flexible之间也同样需要这样的接口。
1.2 总体方案设计整个系统分为硬件设计、PLC程序设计、HMI与PLC通讯、系统实验调试共4部分。
硬件方面,主控制器选用S7-200SMARTCPUST30PLC,发送脉冲指令作为台达伺服驱动器(ASDA-B2-0121-B)的输入信号;通过伺服驱动器实现控制伺服电机(ASDAB2)的旋转速度和驱动丝杆滑台的移动位置[1]。
基于S7-200伺服电机控制系统设计

西安邮电大学毕业设计(论文)题目:基于S7-200伺服电机控制系统设计系别:自动化学院专业:自动化学院班级:自动0805学生姓名:导师姓名:职称:讲师起止时间:2012年3月8日至2012年06月17日毕业设计(论文)诚信声明书本人声明:本人所提交的毕业论文《基于S7-200伺服电机控制系统设计》是本人在指导教师指导下独立研究、写作的成果,论文中所引用他人的文献、数据、图件、资料均已明确标注;对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式注明并表示感谢。
本人完全清楚本声明的法律后果,申请学位论文和资料若有不实之处,本人愿承担相应的法律责任。
论文作者签名:时间:年月日指导教师签名:时间:年月日毕业设计(论文)任务书学生姓名指导教师职称讲师系别自动化学院专业自动化学院题目基于S7-200伺服电机控制系统设计任务与要求要学习基本电气控制的设计方法,学习step7和组态软件的使用。
熟练掌握组态王的使用,完成本课题要认真复习电机控制的基本知识,设计电动机总线型调速控制系统,主要根据电机的调速原理结合总线功能进行设计,要求提交:1.了解电动机总线型调速控制系统设计的基本原理。
2.熟练掌WINCC6.0软件。
3.会使用WINCC6.0软件画组态界面。
4.绘制电气原理图、装配图、接线图。
5.熟练掌握S7-200软件,具有一定的编程能力。
开始日期2012年1月7日完成日期2012年06月20日系主任(签字) 2012 年 1 月8 日毕业设计 (论文) 工作计划学生姓名__ _指导教师_________职称____讲师____系别______自动化学院__________专业________自动化________ 题目基于S7-200伺服电机控制系统设计_______________________________________________________工作进程主要参考书目(资料)主要参考书目(资料) [1] 贾贵玺,张臣刚等.高压变频调速技术的研究及其应用.天津:电气传动,No.4,1999,14~17 [2] 吴洪洋,何湘宁.高功率多电平变换器的研究和应用.天津:电气传动,No.2,2000,7~12 [3] 陈伯时,谢鸿鸣.交流传动系统的控制策略.CAVD ’99, 1~7[4] 苏彦民,李宏.交流调速系统的控制策略.北京:机械工业出版社,1998主要仪器设备及材料 伺服电机及S7-200软件、WINCC论文(设计)过程中教师的指导安排每周三下午、周五下午 对计划的说明西安邮电大学毕业设计(论文)开题报告自动化学院系自动化专业08级05班课题名称:基于S7-200伺服电机控制系统设计学生姓名:学号:指导教师:报告日期:2012年3月28日2.本课题需要重点研究的关键问题、解决的思路及实现预期目标的可行性分析重点研究的关键问题:PLC输出的模拟量实现对伺服电机的速度较为精准的控制解决思路:见原理图说明:本报告必须由承担毕业论文(设计)课题任务的学生在毕业论文(设计) 正式开始的第1周周五之前独立撰写完成,并交指导教师审阅。
利用组态软件实现电力系统的实时监控与远程控制
利用组态软件实现电力系统的实时监控与远程控制电力系统是现代社会不可或缺的基础设施之一,其正常运行对于能源的稳定供应以及社会的正常运转至关重要。
而随着科技的不断进步,电力监控与控制系统也正朝着更加智能化、自动化的方向发展,使得电力系统的监控与控制更加高效、可靠。
组态软件作为电力系统监控与控制的重要工具,越来越受到人们的关注和应用。
在电力系统运行中,采集和分析电力数据是必不可少的环节。
通常情况下,电力系统需要采集的数据包括电压、电流、功率等各种参数。
借助组态软件,可以将这些数据实时采集到计算机中,并进行实时监控和自动控制。
除此之外,组态软件还可以对电力系统中的设备进行状态监测,确保设备的运行状态始终保持在最佳状态。
组态软件除了能够进行实时监控之外,还可以实现远程控制。
随着电力系统不断扩大,其监控难度逐渐增加,因此需要对电力系统中的设备进行远程控制。
组态软件通过集成远程控制功能,可以实现用户对电力系统的实时控制,比如调节电力设备的设置、修改参数等操作。
此外,组态软件还可以对电力系统中的各项设备进行模拟,进行虚拟仿真以分析系统性能,便于对电力系统进行优化和改进。
组态软件集成了数据分析、建模、仿真等功能,使得电力系统监测与控制更加高效,且有利于优化电力系统运营效率。
总的来说,利用组态软件实现电力系统的实时监控与远程控制,可以提升电力系统的安全性、可靠性和可维护性。
同时,还可以通过对电力系统数据进行实时分析和优化,提高电力系统的运营效率和经济效益。
随着电力监控与控制技术的不断进步,组态软件在电力系统中的应用前景越来越广阔。
毕业设计(论文)-基于组态王的电梯远程监控系统设计

毕业设计(论文)-基于组态王的电梯远程监控系统设计基于组态王的电梯远程监控系统设计XXX(指导老师 XX)(湖北师范学院机电与控制工程学院湖北黄石 435002) 摘要:在现代社会和科技的不断发展中,计算机,弱电控制技术已经得到了快速的发展,电梯已经成为了现代城市发展的必要条件和标志。
特别是在一些高层建筑中电梯已经成为了一种必不可少的交通运输工具,而随着现在高层建筑如雨后春笋般的涌出,电梯行业也进入了一个新的发展高峰期。
电梯的控制技术也已经从以前简单的机械控制发展到了现在的全电子计算机控制,以往的继电器也已经完全不能满足现代电梯运行的要求,很多现代的功能都不能实现,所以我们现在使用PLC来代替继电器来实现电梯的逻辑控制。
本次设计主要是针对国内电梯行业的现状,用可编程序控制器(PLC)来实现对电梯的逻辑控制,通过适当的选择和设计,不但可以提高电梯的安全性、灵活性、维护性及其使用寿命,可以大大的减少对电梯新功能的研发周期,提高了电梯的控制水平,改善了电梯的稳定性,使之达到我们所期待的目标。
本设计中的电梯相对于以往的传统电梯,大大的提高了舒适性及其功耗,在现在社会中有着广泛的应用。
该电梯控制系统具有指层、厅召唤、选层选向、手动和自动等功能,具有集选控制的特点。
而对于现在的PLC控制的电梯,在监控室的上位机监控电梯的运行状态是电梯控制的发展必然趋势。
本设计中我们简要分析了电梯监控系统的组成,详细介绍了PLC实现对四层电梯的运行监控,并采用组态王软件实现电梯监控系统的设计,组态监控系统与PLC控制系统进行实时数据交换,在组态监控画面上能实时反映电梯的运行状态,从而实现对电梯运行状态的双向监控。
本设计在深入介绍电梯的运行状态的同时介绍可编程序控制器(PLC),并详细介绍其优点及特点,着重介绍了电梯的软件及监控状态,研究并提出了基于PLC电梯控制系统设计的实现方案,最后对本论文的研究内容进行了总结与展望。
关键词:PLC,电梯,组态王,监控中图分类号:2目录前言第一章绪论1.1电梯继电器控制系统的特点及存在问题1.1.1电梯继电器控制系统的优点1.1.2电梯继电器控制系统存在的问题1.2 PLC及在电梯控制中的应用特点1.2.1 PLC的特点1.2.2 PLC控制电梯的逻辑关系1.2.3 PLC控制电梯的优点第二章 PLC控制系统硬件设计2.1 四层电梯主电路2.1.1电梯控制系统原理图2.1.2电梯理想运行曲线2.1.3四层电梯驱动电机2.1.4 PLC外部接线图2.3工/0点数的分配及机型的选择2.2.1 I/O点数的估算2.2.2输入/输出的分配2.2.3 机型的选择2.4 编码器与PLC的连接2.5系统结构框图3第三章软件设计3.1四层电梯梯形图3.1.1电梯控制主程序流程图3.1.2外召唤信号登记及消除3.1.3内指令信号登记及消除3.1.4电梯的平层信号及处理3.1.5选层定向及反向截梯3.1.6内指令外召唤信号的保持3.1.7各楼层停车信号3.1.8自动开关门3.2 STL语句表第四章软硬件的调试4.1组态王6.5的简介4.2组态王的基本操作4.2.1 建立新工程及画面4.2.2 变量的定义及管理4.2.3 组态王的命令语言4.3图库与控件及命令语言程序4.4 四层电梯在组态王中的仿真调试结论谢辞参考文献4附录5基于组态王的电梯远程监控系统设计余玮龙(指导老师杨青胜)(湖北师范学院机电与控制工程学院湖北黄石 435002)前言电梯是随着现代高楼的林立而兴起的一个比较新的新兴行业,它主要就是一个垂直的交通运输工具。
基于组态软件双闭环直流电动机状态监控系统课程设计程序
基于组态软件双闭环直流电动机状态监控
系统课程设计程序
基于组态软件双闭环直流电动机状态监控系统课程设计
此次课程设计要求我们利用一个组态软件,设计一个双闭环控制
系统,能够实现直流电动机的状态监控。
首先,在调试双闭环控制系统前,需要先了解各部分参数,包括
开环系数K1,K2及闭环系数Kp,Kd,以及直流电动机的换向脉冲输入电流Ia、Id、Iq。
该系统要求能够实现位置控制和载荷控制,在组态软
件中,此类双闭环控制系统的基本元件均可直接调用。
其次,在调试组态软件前,需要正确设置双闭环系统的参数,使
得双闭环系统能够正常工作,这要求我们通过试验来确定系统的参数。
在组态过程中,需要设置好每个元件之间的连接,使得组态程序能正
确运行。
最后,调试双闭环控制系统时,可以在软件中提供的仿真环境中,通过实际操作构造机器人的零件,并设置双闭环系统的参数,并对其
运行情况进行观测,从而得出机器人运动的结果。
调试完双闭环控制系统后,我们将在实际环境中,运行其所构造
的机器人,从而实现直流电动机状态的监控。
得出最终的结果后,我
们再根据实际数据,对控制系统参数进行调整,使实际控制性能达到
最佳。
通过本次课程设计,我们掌握了组态控制程序设计的基本方法,
可为今后应用机器人技术提供良好的基础。
实验4(设计性实验):组态王与松下PLC的联合控制实验(伺服电机位置控制)
实验4(设计性实验):组态王与松下PLC的联合控制实验(伺服电机位置控制)实验四组态王与松下PLC 的联合控制实验(伺服电机位置控制)一、实验目的1. 掌握组态王软件的基础知识及工程建立方法;2. 组态王通讯配置方法;3. 组态王的设备及变量的建立;4. 组态王、PLC 与位置控制模式的伺服电机的联合工作过程实现;二、实验要求组态王软件中建立应用工程,在工程中组态按键、参数设置及显示窗口等;通过按键操作,实现PLC 控制伺服电机按相应要求动作,相关运动参数的设定在组态王中完成。
设计动作要求:其中:动作1、动作2、动作3及动作5的运行速度可以在组态王中设定;动作4,指示灯点亮的延时时间可设定;组态王中,启动按键按下,动作开始执行;暂停按键按下,停止当前运行;按下停止键后,机械轴复位至原点。
三、实验原理参照参考资料。
循环2S 动作4四、实验内容及步骤1.实验内容:(1)建立组态王工程,并在工程中建立PLC设备,完成通讯设置;(2)组态按键、指示灯及参数设置框;(3)建立与PLC内部寄存器相关联的变量;(4)编写PLC控制程序2.实验步骤:1)完成连线及连线检查;2)接通总控台电源开关;3)启动计算机,运行松下PLC编程软件,并建立相应的工程及梯形图;4)新建一个组态王工程,配置好通讯线,按实验内容建立组态界面;5)编写好所有程序后,观察程序运行及程序调试;6)实验完毕关闭清理桌面,关闭电源开关。
五、实验报告1.绘制系统控制框图及流程图;2.组态王通讯及PLC的关联变量建立;3.PLC运行程序的编写以组态王软件组态。
六、程序示例。
基于LabVIEWRT的交流伺服电机实时监控系统
不 。
整 个 交 流 伺 服 电 机 监 控 系 统 硬 件 组 成 如 图 2所
婆 盘 肇 害 目鹏 鬟 驱 动 曰
臼
曰 L a b V l E W
图 2 系统 硬 件 组 成
时机 与 P C 端 数 据 的 实 时传 榆 。
关键词 : 实 时监控 ; L a b VI E WR T; 高速 采 集
0引 言
在交流伺服 电机控 制系统 中 . 既要完成 高速闭环 控制 . 又要实 现数 据 的高速采集 和存 储 . 是一件 很 困 难 的事 。因为能完成 实时控制 的软 件 . 其大 量处理数
I [ . . . . . . . . 一
园
V I S A配置串 口 V I S A写入 V I S A读取 V I S A关闭
l 控制室计算机 i ( 实时机Leabharlann R S 一 4 8 5 l
图3 L a b V I E W V I S A模 块
控 制 板
在调用 串口时 , 首先 需要配置 串 I : I 号、 波特率 、 起 始位等 , 以打开 串 I = I : 然后 , 调用 V I S A读取和写入 。 完成 数据的收发; 最后 , 关闭 V I S A, 实现串 口数据的收发。
V I E W R T系统与各 主控 板 的串行 通信 .并 以 T C P协 议 将 数 据 传输 到 L a b V I E W 上 位 机 进行 数 据 实 时 显
示
2 . 1 L a b V I E W V I S A 模 块
在L a b V I E W 中利用 V I S A节 点进 行 串行通信 编 程 。为了方便用 户使 用 . L a b V I E W 将 这些 V I S A节 点 单独组 成一 个子模 块 , 共 包含 8个节 点 、 分 别实现 初
基于MCGS组态软件的电液伺服阀性能测试监控系统开发
基 于 M G 组 态 软件 的 电液 伺服 阀性 能测试 监 控 系统开 发 CS
郭虹 ,卞军 ,李艳 杰
(.沈 阳理 工 大学机械 工程 学 院 ,辽 宁沈 阳 10 5 ; 1 119 2 .三 一精机 有 限公 司研 究 院电 气所 ,上 海 203 ) 00 1
摘要 :介绍 M G C S组态软件 ,应用 MC S和 Vsa B s G i l ai u c混合编程开发出电液伺服 阀性能测试监控系统 ,详细阐述该系 统 的主要功能 。以空载流量特性测试监控实验为例 ,介绍 F S O T 5 1 E T P 1 液压伺服 阀空载流量特性测试过程 的监控和动画演 示 。实验结果表 明:该监控系统运行可靠 、操作简单 ,监控 系统 界面友好 ,动 画演示生动 。
21 0 2年 5月
机床 与液压
MAC NE TOOL & HYDRAULI HI CS
M a 01 v2 2 Vo . 0 No 9 14 .
第4 0卷 第 9期
D :1 . 9 9 jis. 0 1—3 8 . 0 2 0 . 3 OI 0 3 6 /.sn 1 0 8 12 1 .90 0
电液伺服阀是电液伺 服系统 中的关键元件 ,既是 电液转换元件 ,又是 功率放 大元件 ,它能 力 ) 输 出,其性能的优劣对系统 的影 响很大 。为 了充分掌 握其特性 ,需要进行充分的实验分析 ,包括静态特性
试验和 动 态特 性 试 验。T 5 1实验 台是 德 国 F S O P1 ET 公 司生产 的液压伺服实验台 ,该 实验台具有 占地面积 小 、噪声小 、各元件的安装 和固定都非常容易 、密封
2 R sac stt, a yC m ay S a ga 2 0 3 ,C ia . eerhI tue S n o p n , hn h i 0 0 ni l h ) n
了解组态软件在电动机控制中的应用
了解组态软件在电动机控制中的应用组态软件在电动机控制中的应用随着现代工业的发展,电动机控制成为了工业控制中不可或缺的一部分。
为了提高电动机的运行效率和精确度,传统的硬件控制方式已经逐渐被组态软件取代。
组态软件具备图形化界面和丰富的功能模块,使得电动机的控制更加灵活、智能化和可靠。
本文将介绍组态软件在电动机控制中的应用,并重点阐述其优势和实际案例。
一、组态软件在电动机控制中的优势组态软件作为一种软件化的控制方式,相较于传统的硬件控制方式具有以下优势:1. 图形化界面:组态软件通过图形化界面的设计,使得电动机的控制参数直观可见。
操作人员可以通过简单的鼠标点击和拖拽操作,完成对电动机的各项参数设置,降低了操作的复杂程度。
2. 可编程性:组态软件具备强大的编程功能,可以通过编写代码实现对电动机的逻辑控制。
这使得电动机的启停控制、转速控制以及故障监测等功能更加灵活,满足不同场景下的需求。
3. 实时监测:组态软件可以实时监测电动机的运行状态和各项参数,并以直观的方式展示给操作人员。
这使得操作人员可以及时发现电动机的异常情况,并采取相应的措施进行处理,提高了电动机的可靠性和安全性。
4. 数据记录与分析:组态软件可以记录电动机的运行数据,并对数据进行分析和统计。
这有助于对电动机的性能进行评估和优化,提高其运行效率和能源利用率。
二、组态软件在电动机控制中的实际应用组态软件在电动机控制领域有着广泛的应用,下面我们将以两个实际案例来说明其在电动机控制中的具体应用。
1. 某汽车生产线的电动机控制:某汽车生产线上的关键设备,比如焊接机器人和流水线传动系统,都采用了电动机进行驱动。
通过组态软件,可以实现对这些电动机的集中控制和监测。
操作人员可以通过图形化界面,实时监测电动机的运行状态、转速、温度等参数,并对其进行调整和优化。
同时,组态软件还可以提供数据报表和趋势分析,对电动机的性能进行评估和故障分析,提高生产线的效率和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南阳理工学院本科生毕业设计学院:电子与电气工程学院专业:电气工程及其自动化学生:指导教师:完成日期 2013 年 5 月南阳理工学院本科生毕业设计基于组态软件的伺服电机监控系统的设计Design of Servo Motor Monitoring SystemBased on Configuration Software总计:29 页表格: 4 个插图: 22 幅南阳理工学院本科毕业设计基于组态软件的伺服电机监控系统的设计Design of Servo Motor Monitoring System Based on Configuration Software学院:电子与电气工程学院专业:电气工程及其自动化学生姓名:徐功平学号:1109614077指导教师(职称):刘峰(讲师)评阅教师:完成日期:南阳理工学院Nanyang Institute of Technology基于组态软件的伺服电机监控系统的设计电气工程及其自动化专业徐功平[摘要]随着现代电子和控制技术的高速发展,交流伺服电机日益成熟,性能不断提升,且能在上位机上实时监控电机的运动轨迹,更能方便检测电机的故障和安全隐患。
本设计介绍了一种基于IFIX组态软件和PLC的电机伺服控制系统。
系统主要有组态软件、PLC、伺服驱动器、伺服电机组成。
其中,以IFIX组态软件作为人机界面,可实现对系统的实时监控,以伺服电动机为控制对象,以驱动器器为核心,以电力电子功率变换装置为执行机构。
这类系统实现对控制网络中电机的正、反转,起、停机,加、减速,及故障报警、历史趋势、数据共享等要求。
结果表明,采用这种控制方案,可以取得良好的控制效果,运行稳定,满足设计要求,因此本设计具有广泛的应用前景与实际意义。
[关键词]监控系统;组态软件;伺服电机;PLC;模拟量Design of Servo Motor Monitoring SystemBased on Configuration SoftwareElectrical Engineering and Automation Specialty XU Gong-pingAbstract:With the rapid development of modern electronic and control technology, ac servo motor is increasingly mature, improve performance, and can real-time monitoring on the upper motor movement, more convenient testing machine failure and safe hidden trouble. This paper introduces a kind of based on IFIX configuration software and Programmable Logic Controller, servo motor control system. System includes configuration software, Programmable Logic Controller, servo driver, servo motor. Among them, the IFIX configuration software as the man-machine interface, which can realize real-time monitoring of system, servo motors as control object, the controller as the core, to power electronic power conversion devices for actuators. Such system to achieve the motor in the control network is, reverse, up, down, add, deceleration, and fault alarm, history trend, data sharing and other requirements. Test results show that adopting this control scheme can achieve good control effect, stable operation, meet the design requirements, therefore this design has wide application prospects and practical significance.Key Words:Monitoring system; configuration software; servo motor ; programmable logic controller; analog quantity目录1引言 (1)1.1 国内外研究现状 (1)1.2 本课题研究意义及前景 (1)2 伺服电机监控系统的概述和方案设计 (2)2.1 伺服电机控制系统现状及趋势 (2)2.2伺服电机系统优点 (3)2.3 系统设计要求和设计方案 (3)2.3.1系统设计要求 (3)2.3.2系统设计方案 (3)3 伺服电动机调速系统设计 (4)3.1 伺服电机调速系统的基本结构图 (4)3.2 伺服电机结构和工作原理 (5)3.2.1交流伺服电动机的组成结构 (5)3.2.2伺服电动机的工作原理 (6)3.2.3伺服电机在位置和速度模式下的运转和调整 (7)3.3 伺服驱动器 (8)3.3.1伺服驱动器控制电路设计 (8)3.3.2伺服电机驱动器调速控制系统及其原理 (8)3.3.3伺服驱动器闭环控制参数设置 (10)3.4伺服电机调速控制系统硬件接线图 (10)3.5 软件设计 (11)4 Step7编程软件概述及组态界面的设计 (13)4.1 S7-200PLC的概述 (13)4.1.1 SIMATIC S7-200PLC系统组成 (13)4.1.2 S7-200PLC功能及通讯 (13)4.2 Step7程序编写 (14)4.3 S7-200PLC的通信 (15)4.3.1 PLC与伺服系统的通信控制 (15)4.3.2 组态软件选择 (16)4.3.3 IFIX与S7-200PLC的通信 (17)4.4 组态界面设计 (18)4.4.1组态监控界面 (18)4.4.2组态变量 (18)5 控制过程及结果分析 (20)5.1 组态控制过程 (20)5.2 系统结果分析 (22)结束语 (24)参考文献 (25)附录 (26)致谢 (29)1引言随着自动化水平的不断提高,越来越多的工业控制场合需要精确的伺服运动控制,因此如何更方便、更准确地实现伺服运动控制和实时监控是工业控制领域内的一个重要问题。
1.1 国内外研究现状国外在这方面已有了较大突破。
例如加拿大的GEMS系统通过对传感器的数据进行优化处理来辅助操作者完成准确的电机诊断。
GEMS监控程序由专家系统分析模块、状态估计处理器和用户接口模块组成。
GEMS装置顾问程序是运行在一台PC机上独立的软件,通过C语言编程来实现数据采集并实现伺服电机传感器数据与GEMS监控程序中的状态估计处理器的通讯来实现监控。
而美国的PDS系统则是通过建立规则知识库来实现监控的。
PDS系统通过对传感器数据进行压缩,然后将数据传送到诊断中心,经诊断后输出以实现监控。
到目前为止,高性能的电机伺服系统大多采用永磁同步型交流伺服电动机,控制驱动器多采用快速、准确定位的全数字位置伺服系统。
典型生产厂家如德国西门子、美国科尔摩根和日本松下及安川等公司。
目前,国内大部分工厂仅对电机进行具体的、有限的监控。
大多数情况下,老机组仅依靠表盘监控,即使少数新上的机组有微机在线监测装置,进入微机的数据也很有限且没有经过判断和综合分析,因此微机在线监控装置仅能作为信号记录及储存使用。
这样,运行人员仅凭经验来判断电机运行状态的异常现象,难以准确早期发现事故隐患。
从20世纪80年代初开始,各种各样的在线监测装置在船用发电机上得到了推广和应用。
以往,我国用电设备长期以来实施“计划维修”,缺乏针对性,容易造成设备的“过度维修”。
现在,先进的工业国家都转至状态维修也就是“需修时修”。
1.2 本课题研究意义及前景20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。
交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。
90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。
交流伺服驱动装置在传动领域的发展日新月异。
本设计采用IFIX组态软件开发人机交互界面,利用PLC来完成对伺服驱动器的控制和反馈,实现对控制网络中电机的正、反转,起、停机,加、减速,及故障报警、历史趋势、数据共享等,实现报表的自动生成以及生产的高效管理。
使生产过程操作简单、降低控制、维护成本。
其中伺服驱动器将具有一定电压、电流和频率的电源能量变换为具有可调电压、可调电流或可调频率电源能量起电能变换和控制作用,以检验和变换反馈信号。
控制层根据给定信号和反馈信号产生需要的控制指令和偏差信号。
调节装置用于按照一定规律控制变流装置能量的流动,通过硬件或软件产生满足控制要求的算法或校正量,以提高或校正系统的静态性能。
通过人机交互界面的设计,能够实时监控电机运行状态。
实时监控是与人们息息相关的一个实际问题。
针对这种实际情况,借助PLC 梯形图和接口电路设计一个基于PLC的伺服控制系统设计,更能方便检测电机的故障和安全隐患。
交流伺服电机技术也日益成熟,性能不断提升,并且在上位机上能够实时的监控电机的运动速度,具有控制精度比较高,抗干扰能力强,具有广泛的应用前景与实际意义。
2 伺服电机监控系统的概述和方案设计2.1 伺服电机控制系统现状及趋势从70年代后期到80年代初期,随着微处理器技术、大功率高性能半导体功率器件技术和电机永磁材料制造工艺的发展及其性能价格比的日益提高,交流伺服技术——交流伺服电机和交流伺服控制系统逐渐成为主导产品。
交流伺服驱动技术已经成为工业领域实现自动化的基础技术之一,并将逐渐取代直流伺服系统。
交流伺服系统按其采用的驱动电动机的类型来分,主要有两大类:永磁同步(SM 型)电动机交流伺服系统和感应式异步(IM型)电动机交流伺服系统。