基于体半径函数的网格分割算法
点云常用分割方法
点云常⽤分割⽅法点云分割 点云分割可谓点云处理的精髓,也是三维图像相对⼆维图像最⼤优势的体现。
点云分割的⽬的是提取点云中的不同物体,从⽽实现分⽽治之,突出重点,单独处理的⽬的。
⽽在现实点云数据中,往往对场景中的物体有⼀定先验知识。
⽐如:桌⾯墙⾯多半是⼤平⾯,桌上的罐⼦应该是圆柱体,长⽅体的盒⼦可能是⽜奶盒......对于复杂场景中的物体,其⼏何外形可以归结于简单的⼏何形状。
这为分割带来了巨⼤的便利,因为简单⼏何形状是可以⽤⽅程来描述的,或者说,可以⽤有限的参数来描述复杂的物体。
⽽⽅程则代表的物体的拓扑抽象。
于是,RanSaC算法可以很好的将此类物体分割出来。
1、RanSaC算法 RanSaC算法(随机采样⼀致)原本是⽤于数据处理的⼀种经典算法,其作⽤是在⼤量噪声情况下,提取物体中特定的成分。
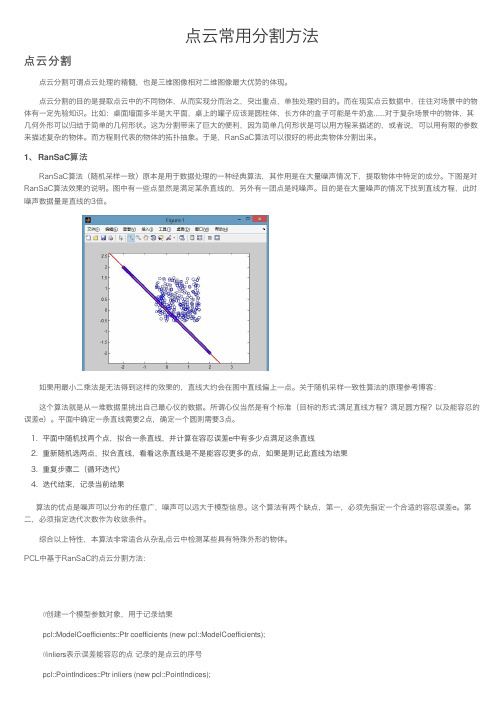
下图是对RanSaC算法效果的说明。
图中有⼀些点显然是满⾜某条直线的,另外有⼀团点是纯噪声。
⽬的是在⼤量噪声的情况下找到直线⽅程,此时噪声数据量是直线的3倍。
如果⽤最⼩⼆乘法是⽆法得到这样的效果的,直线⼤约会在图中直线偏上⼀点。
关于随机采样⼀致性算法的原理参考博客: 这个算法就是从⼀堆数据⾥挑出⾃⼰最⼼仪的数据。
所谓⼼仪当然是有个标准(⽬标的形式:满⾜直线⽅程?满⾜圆⽅程?以及能容忍的误差e)。
平⾯中确定⼀条直线需要2点,确定⼀个圆则需要3点。
1. 平⾯中随机找两个点,拟合⼀条直线,并计算在容忍误差e中有多少点满⾜这条直线2. 重新随机选两点,拟合直线,看看这条直线是不是能容忍更多的点,如果是则记此直线为结果3. 重复步骤⼆(循环迭代)4. 迭代结束,记录当前结果算法的优点是噪声可以分布的任意⼴,噪声可以远⼤于模型信息。
这个算法有两个缺点,第⼀,必须先指定⼀个合适的容忍误差e。
第⼆,必须指定迭代次数作为收敛条件。
综合以上特性,本算法⾮常适合从杂乱点云中检测某些具有特殊外形的物体。
PCL中基于RanSaC的点云分割⽅法:1. //创建⼀个模型参数对象,⽤于记录结果2. pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);3. //inliers表⽰误差能容忍的点记录的是点云的序号4. pcl::PointIndices::Ptr inliers (new pcl::PointIndices);5. // 创建⼀个分割器6. pcl::SACSegmentation<pcl::PointXYZ> seg;7. // Optional8. seg.setOptimizeCoefficients (true);9. // Mandatory-设置⽬标⼏何形状0. seg.setModelType (pcl::SACMODEL_PLANE);1. //分割⽅法:随机采样法2. seg.setMethodType (pcl::SAC_RANSAC);3. //设置误差容忍范围4. seg.setDistanceThreshold (0.01);5. //输⼊点云6. seg.setInputCloud (cloud);7. //分割点云8. seg.segment (*inliers, *coefficients);除了平⾯以外,PCL⼏乎⽀持所有的⼏何形状。
ansys workbench 15.0 网格划分

网格修补选项只有一个三角表 面网格划分器设置选项。对于三 角表面网格划分器,存在两个选 项:程序控制和高级前缘,程序 控制选项为默认选项。
-如果选择程序控制选项,则程序根据模型表面形状,来确定是否 使用三角剖分法(Delaunay)或高级前缘(advancing front)算 法;
-如果选择高级前缘算法,则程序优先使用高级前缘算法,如果网 格划分过程中失败,则自动转换为三角剖分算法。
-参数化:参数驱动系统,可以基于优化设计 模块,研究网格对求解精度的影响;
-稳定性:模型通过系统参数进行更新; -高度自动化:仅需要有限的输入信息即可完
成基本的分析类型; -灵活性:能够对结果网格添加控制和影响(
完全控制建模/分析); -物理相关:根据物理环境的不同,系统自动
建模和分析的物理系统; -自适应结果:适应用户程序的开发系统 ——CAD neutral meshing netral solver
3.网格控制-总体尺寸控制-高级尺寸函数
Proximity尺寸控制函数
-该函数基于模型边缘特征控制网格,主要作用于 模型中的所有边缘,该函数有6个控制参数: Proximity Accuracy-临近边缘精度参数; Num Cells Across Gap-间隙截面单元数量; Proximity Min Size-边缘最小尺寸; Max Face –面上最大尺寸; Max Size-总体最大尺寸; Growth Rate-网格生长率;
网格控制总体尺寸控制高级尺寸函数曲率尺寸函数网格划分算法基于五个参数控制网格密度单元以模型中的孔洞为起始处起始处的网格大小由曲率法向角度和最小尺寸共同控制并且最小尺寸占主导即当最小尺寸小于曲率法向角度的单元尺寸时单元大小由曲率法向决定否则由单元最小尺寸控制
Netgen网格划分程序采用的推进前线法算法实现步骤

Netgen网格划分程序采用的推进前线法算法实现步骤Netgen网格划分程序采用的推进前线法advancing front method算法方法是将具体规则与规则应用程序代码分离。
算法必须检查存储在数据结构中的规则。
因此,代码复杂度与规则的数量无关。
该算法复杂,但定义良好,至少在理论上可以实现故障保护。
特别是在3D中,具体规则的选择是基于启发式的,并将其放入一个易于维护的规则描述数据库中。
我们按以下步骤进行处理。
首先,我们描述了整个算法,接着是抽象规则描述和规则应用算法。
最后,我们集中讨论了曲面和体网格生成的扩展。
基本思路首先:建立模型,构造立体几何提供常用的基本单元:立方体圆柱椭圆球圆球长方体等等复杂的模型通过对基本单元的bool操作来建立。
(对于复杂几何模型,我们需要求解三元非线性方程组,来计算用于寻找边缘的起始点)一、求解相交点图相交点示意图求解相交点的方法采用基于几何测试的二分算法,其示意图如下图所示。
图二分法求交点示意图基于几何测试的二分算法的计算流程1 建立一个立方体,将整个几何模型包含在该立方体内2 沿立方体的八条边界的中点分别建立三个相互正交的平面,三个平面将立方体划分成八个大小相等的小立方体。
3 判断交点在哪一个小立方体内4 在该小立方体内重复第二步,第三步。
5 循环的结束条件为立方体的边长小于给定的精确度值6 求出交点的坐标位置图极坐标下中的相交点图两个相贯的圆柱二、计算边缘:使用求解非线性方程组的同伦方法进行计算跟踪曲线。
1 该方法的原理是:从曲线上一个给定的点X0开始,通过预估-矫正的方法,沿着曲线小步推进,直到到达曲线的终点。
2 方法步骤:首先从选定的初始点X0出发,沿着曲线的切向量方向其次确定相邻两点之间的递归关系假设已知当前点Xk,计算曲线在改点的单位切向量Tk,预估下一点的位置,对该点的位置进行修正,采用牛顿下山法,对于平滑曲线,有这样一个关系式,它可以用于适应性步长控制。
基于谱聚类的三维网格分割算法(SpectralClustering)

基于谱聚类的三维⽹格分割算法(SpectralClustering) 谱聚类(Spectral Clustering)是⼀种⼴泛使⽤的数据聚类算法,[Liu et al. 2004]基于谱聚类算法⾸次提出了⼀种三维⽹格分割⽅法。
该⽅法⾸先构建⼀个相似矩阵⽤于记录⽹格上相邻⾯⽚之间的差异性,然后计算相似矩阵的前k个特征向量,这些特征向量将⽹格⾯⽚映射到k维谱空间的单位球上,最后使⽤K-means⽅法对谱空间中的数据点进⾏聚类。
具体算法过程如下:⼀.相似矩阵 ⽹格分割以⾯⽚为基本单元,为了能使算法沿着⼏何模型的凹形区域进⾏分割,⽹格相邻⾯⽚之间的距离采⽤[Katz et al. 2003]中提到的⽅法,具体形式在“”中有所解释,距离由测地距离Geod_Dist和⾓度距离Ang_Dist两部分组成,如下所⽰: 上式中有两个重要的参数δ和η,参数δ通常取值范围为[0.01, 0.05],其⽤于控制测地距离和⾓度距离之间的权重⽐例,参数η通常取值范围为[0.1, 0.2],其使得分割边界更倾向于凹形区域。
计算完相邻⾯⽚之间的距离后,相似矩阵中对应位置的值由距离的⾼斯函数得到:其中:⼆.⽹格谱聚类 谱聚类⽅法在本质上都是类似的,都是利⽤相似矩阵的特征向量将原始空间中的数据映射到谱空间,并在谱空间中进⾏聚类。
⽹格上的谱聚类⽅法如下: 1 由上述定义计算相似矩阵W; 2 计算归⼀化矩阵N:N = D-1/2WD-1/2; 3 计算矩阵N的前k个最⼤特征向量e1, e2, … , e k,以这k个特征向量为列组成矩阵U = [e1, e2, … , e k]; 4 将矩阵U的每⼀⾏单位化后得到矩阵Ȗ; 5 提取出k个初始聚类中⼼⽤于K-means聚类,该过程先计算矩阵Q = ȖȖT,然后查找矩阵Q中的最⼩元素Q rs,那么r和s点就是两个距离最远的点,然后继续查找后续点; 6 以Ȗ的⾏向量为数据样本进⾏K-means聚类。
solidworks网格划分技巧
CosmosWorks网格划分、求解器、提示与技巧一、网格划分策略网格划分,更精确地说应该称为离散化,就是将一数学模型转化为有限元模型以准备求解。
作为一种有限元方法,网格划分完成两项任务。
第一,它用一离散的模型替代连续模型。
因此,网格划分将问题简化为一系列有限多个未知域,而这些未知域符合由近似数值技术的求解结果。
第二,它用一组单元各自定义的简单多项式函数来描述我们渴望得到的解(e.g位移或温度)。
对于使用者来说,网格划分是求解问题必不可少的一步。
许多FEA初学者急切盼望格划分为全自动过程而几乎不需要自己输入什么。
随着经验的增加,就会意识到这样一个现实:网格划分常常是要求非常苛刻的任务。
商用FEA软件的发展历史见证了网格划分对F EA 用户透明的诸多尝试,然它并不是一条成功的途径。
而当网格划分过程既简单又自动执行时,它也仍旧不是一个“非手工干涉”而仅靠后台运行的任务。
作为FEA用户,我们想要有一种可以和网格划分过程交互的方法。
COSMOSW orks通过将用户从那些纯粹网格细节意义上的问题中解脱出来,找到了良好的平衡点;并使我们在需要时可以控制网格划分。
几何体准备理想情况下,我们用SolidW orks的几何体,联入COSMOSWorks环境。
在这里,我们定义分析和材料的类型,施加载荷与约束,然后为几何体划分网格并得到求解。
这种方法在简单模型下能起作用。
对于更为复杂的几何体,则要求在网格划分前作些准备。
在FEA 的几何体准备过程中,我们从特定制造,CAD 几何体出发,为分析而特地构造几何体。
我们称这个几何体为FE A 几何体。
基于两者的不同要求,我们对CAD 几何体和FE A 几何体作一区别:CAD 几何体FEA几何体必须包含机械制造所需的所有信息必须可划分网格必须允许创建能正确模拟所关心资料的网格必须允许创建能在合理时间内可求解的网格通常,CAD 几何体不能满足FEA 几何体的要求。
ANSYS 13.0 Workbench 网格划分及操作案例

第 3章 ANSYS 13.0 Workbench网格划分及操作案例网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。
网格直接影响到求解精 度、求解收敛性和求解速度。
此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。
因此,一个越好的自动化网格工具,越能得到好的解决方案。
3.1 ANSYS 13.0 Workbench 网格划分概述ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。
此外,变化参数可以得到即时更新的网 格。
ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。
网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。
可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。
在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。
ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。
作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFXMESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。
【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。
不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。
基于Netgen的四面体网格剖分算法及其应用

基于Netgen的四面体网格剖分算法及其应用魏斌;徐华【摘要】A Netgen-based tetrahedralization algorithm was proposed,which fulfilled the tetrahedralization based on complex TIN models after close,non-manifold and surface normal vector checks of TIN model through analysis of various kinds of mo-dels.No points were added on the constraint surface of TIN models in Netgen-based tetrahedralization,leading to the high con-sistency between the original surface and the tetrahedron shape,and ensuring the accuracy of the model and boundary consistency under coplanarity.A sample application in a mineral's formation data shows that the Netgen-based tetrahedralization algorithm is stable,efficient and ensures the boundary consistency and high quality of mesh.%通过对各类模型的分析和归纳,提出一种基于Netgen的四面体剖分算法,对不规则三角网(TIN)模型进行封闭性检查、非流形检查、表面法向量检查和相交性检查,实现基于TIN复杂模型的四面体剖分.进行四面体剖分时,不在模型的约束面加点,使原始曲面与四面体形状间高度吻合,确保模型精度,保证共面情况下的边界一致性.某矿地层数据的实例应用结果表明,使用该算法能够使边界一致,得到高质量网格,兼具稳定性和高效性.【期刊名称】《计算机工程与设计》【年(卷),期】2017(038)002【总页数】6页(P368-373)【关键词】四面体剖分算法;封闭性检查;非流形检查;表面法向量检查;相交性检查;边界一致性;单元质量【作者】魏斌;徐华【作者单位】北京化工大学信息科学与技术学院,北京 100029;北京石油化工学院信息工程学院,北京 102617【正文语种】中文【中图分类】TP391.41如何解决复杂模型剖分时的边界一致性和生成高质量单元是四面体剖分的难点之一。
一种基于热核的三维人体网格模型分割方法

一种基于热核的三维人体网格模型分割方法【摘要】提出了一种基于热核的三维人体模型分割方法。
首先计算三维人体模型顶点的热核签名值;然后采用阀值分割法利用设定的分割阀值对模型进行初始分割;最后对阀值分割结果中大于阀值的部分进行凝聚聚类,得到最终的分割结果。
实验结果表明,分割结果不仅符合视觉最小值原则,还具有很好的语义信息;同时分割结果具有与姿势无关和鲁棒性好的特点。
【关键词】热核签名;人体模型;模型分割;谱聚类1.引言随着三维人体扫描技术的发展,三维人体模型已经无处不在,广泛应用于人机工程、游戏、动画、服装等领域。
由于人体模型越来越精细,复杂度越来越高,为了简化人体结构的复杂性,同时更好地适用于其它应用领域的需求,通常要求将三维人体模型分割成头部、躯干、上肢和下肢等部分,为人体模型的高级表示和进一步的语义特征分析提供基础。
模型分割是形状特征分析的基础[1]。
由于人体外形受年龄、性别、姿态等的影响,人体模型的自动分割成为一个具有挑战性的问题,国内外学者对此问题进行了比较深入的研究。
Nurre等[2]应用一种六杆的棒形人体模板,通过整体几何的匹配来达到细节特征识别,进而把人体分成与模板对应的头、左臂、躯干、右臂、左腿、右腿六个功能部分;Wang等[3] 通过对水平面与人体模型相交的截面形状,应用模糊规则确定拐点位置来识别腋窝和胯特征点,然后把人体模型分割为与文献[2]相同的六部分;Werghi等[4]提出了一种基于Reeb图的三维人体分割算法。
通过选取测地距离函数作为莫尔斯函数建立Reeb图,该方法对体形、姿态等变化具有鲁棒性。
其缺点是计算量大,算法效率不高;Katz等[5]提出了一种通用的三维网格模型模糊聚类分割算法,该算法可以处理任意姿态、不同部件比例的模型,并且应用了层次分割的思想,在避免了过分割和边界锯齿的同时,能够得到不同粒度层次分割结果。
此算法应用与人体模型可以得到较好的分割结果。
本文以三维人体测量为背景,采用坐标无关、几何不变的模型特征描述子,实现一种基于热核的人体模型分割方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
性和噪声鲁棒性 。在此基础上 ,提出一种 网格 层次分 割算法 。计算模型顶点的体半径值 , 用二状态高斯混合模型对体半径分布拟合 ,进 采
行连通分量标注 , 获取模型的各子部件 , 结合 图切分技术得到有视觉意义的分割结果。实验 结果表 明, 该算法可以实现有意义 的网格 分割,
且对物体 的姿态变化及 噪声具有较好 的鲁棒性 。
第3 7卷 第 2 期 2
Vb13 -7
・
计
算
机
工
程
2 1 年 1 月 01 1
N o e b r 0l v m e 2 1
No-2 2
Comp t rEng n e i g ue i e rn
开发研究与设计技术 ・
文 编 1 o 3 8 f )— 2 _3 文 标 码: 章 号: 0 _ 4 (I 2 4 _ o 2212 m0 l 献 识 A
t h ep eo h emo e n d r b s t o s . ot os ft d la o u t on ie
[ ywo d ]V lmer du( )Ga si xueMo e( MM)mehsg na o ; rp u; oo o iga Ke r s ou tc is i Ra VR ; u s nMitr d I a G ; s me t n gahctV rn i arm e i t d
关健词 :体半径 ;高斯混合模型 ;网格分割 ;图切分 ;V r o 图 oo i n
‘
பைடு நூலகம்
M e h S g e t t n Al o ih s e m n a i g rt m o Ba e n Vo u e r cRa i sF n to s d o l m t i d u u c i n
sg nain. p rme tidc tsta ep o o e lo tm sefce ta dc np rio s t e nn f at, e n e me tt o Ex ei n n iae th r p sdag r h i fiin a att name hi om a igul rs m a whi ,tsiv ra t h t i n i n p l ii n ai e n
[ sr c]I re v ro e iav na e f en es ie omo e sr c clriadn ienpeet s g na o loi m, Ab tat nodroo ec met sd at igsniv dl uf el a atn os rsn hs mett na r t hd g ob t t a o t i me e i g t h
MAY -iL h n -eW A inz, HAo ig Z aq, I o gk , NG X a -e Z Z Jn , HAN X a - a G ioj n u
( 0 tf Ro m, h e o dA tlr n ie r gColg , ’n7 0 2 , h n ) 41 a S o T eS c n rieyE g n e n l i l e Xi 1 0 5 C i a e a
t i p p rd fn s a s r a e me rc c le o u ti a i a s i v ra tt h o e o e mo e n o us o n i e h s a e e i e u c ti al d v l me rc r d ust ti n a i n t e p s ft d la d r b tt o s .Ba e n t i ti , f h o h s d o h s me rc a
he ac i l s e me tt n a o tm rp sd I c mp tsV l me i du ( ) o a hv r x f stedsr u o f a e s g irrh c h sg nai l r h i po o e . t o ue o u t cRa isVR f r c et , t h i i t no v l s i a me o gi s r e e i tb i VR u u n t O s t Ga s i xu e o e( W —t e u sa Mi tr d l a n M GMM) u e o n ce o o e t ag r m e es p ae bp r , n mp o s rp —u lo t m , s s n e tdc mp n ns lo i c h o t t g t a td s -at a d e ly g a h c t g r h h t er u s a a i
中 分 圈 噗号: P9. T3 0 33
基 于体 半径 函数 的 网格 分割 算法
马亚奇 ,李虑科 ,王先泽 ,赵 静,张晓娟
( 炮兵工程学 院 4 1 第二 0 教研室 ,西安 7 0 2 ) 10 5
摘
要 :为解决现有网格分割算法对 表面局部特征 和噪声敏感 的问题 ,定义一种刻画模 型体属性 的测度——体半径 ,该测度具有姿态不变
t g t h e o e t me ni f l a t i n n . Ex c t r c r i ey f r me to e l s r e r e u e r e e s b a t o gan i r c i a me h a ng u p r i o i g t e u e e u sv l a o e n i n d a t t e p oc d r s f v r h o y u p r t i h e a h c l r s