海战场作战仿真系统的雷达建模与仿真(1)
海战场电子干扰环境下雷达作用距离建模与仿真
对 第 部干扰机方 向的天线增益 ; R ; 为第 后部干扰
机距 雷达 的距 离 ; A为雷达 电磁 波 的波 长 ; B j ) 为干
扰信号带宽 。
2 基于电子干扰环境下的雷达作用距离模型
判 断雷达 是否 能够探测 到 目标 主要 是依 据综合
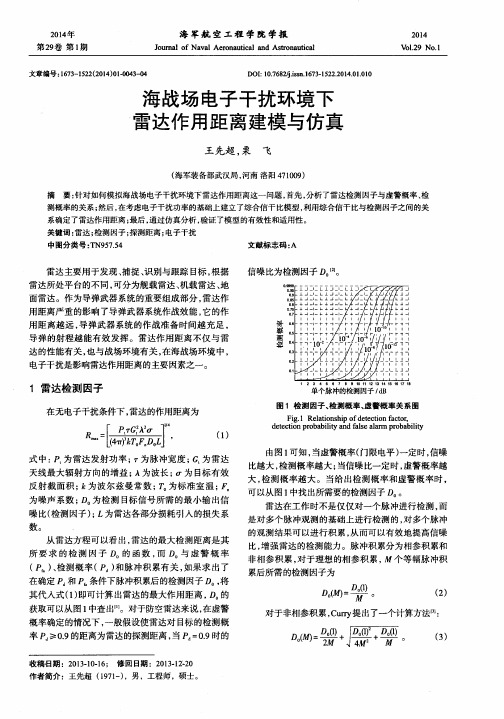
图 1 检测因子、 检测概率 、 虚 警概 率关系图
F i g . 1 Re l a t i o n s h i p o f d e t e c t i o n f a c t o r ,
l
㈩
d e t e c t i o n p r o b a b i l i t y a n d f a l s e a l a r m p r o b a b i l i y t
D 。 ㈤:
+ J / D o ( 1 ) 2 十 D o ( 1 )
。
( 3 )
作者简介 :王先超 ( 1 9 7 t 一 ) ,男 ,工程师 ,硕士 。
・
4 4 ・
海 军 航 空 工 程 学 院 学报
第2 9 卷
式( 3 ) 中: D 。 ( 1 ) 表示不积 累时所需要 的单 个脉 冲信 噪 比; D。 ( 表示 积累后所需要的单个脉 冲信噪 比。
系确定 了雷达作用距离 ; 最后 , 通过仿 真分析 , 验证 了模型 的有效性 和适用性 。
关键词 : 雷达 ; 检测因子 ; 探测距离 ; 电子干扰 中图分类号 : T N9 5 7 . 5 4 文献标志码 : A
雷达 主要 用于发现 、 捕捉、 识别 与跟踪 目标 , 根据 雷达所处 平台 的不 同 , 可分为舰载雷达 、 机载雷达 、 地 面雷达 。作为导 弹武 器系统 的重要 组成部分 , 雷 达作 用距离严 重的影 响了导弹武器 系统作 战效能 , 它的作 用距 离越 远 , 导 弹武器 系统 的作 战准备 时 间越 充 足 , 导 弹的射程 越 能有效 发挥 。雷达 作用距 离 不仅 与雷 达 的性 能有 关 , 也与 战场环境有关 , 在海战场环境 中 , 电子干扰是影响雷达作用距离的主要因素之一 。
机载相控阵雷达杂波建模与仿真-Read
第二章机载相控阵雷达杂波建模与仿真§2.1引言众所周知,雷达体制及工作环境不同,雷达杂波的特性也不同。
机载雷达工作在下视状态,地(海)杂波是影响雷达探测性能的主要因素,因此,在研究AEW雷达CFAR检测算法之前,有必要获得对雷达杂波特性的充分认识。
鉴于机载雷达的杂波与反射地类有关且随时间变化,即不同的地类(如海洋和高山)有不同的分布特性,同一地类在不同时刻分布参数也有变化。
研究雷达杂波特性的方式有两种,一是对实际测量的杂波数据进行统计分析,二是结合AEW 雷达的实际体制与参数,对不同地类(如沙漠、农田、海洋、丘陵和高山等)用不同的杂波起伏模型进行建模与仿真。
相比较实测数据而言,仿真数据虽然不能完全真实地反映实际环境中的复杂情况,但其也有自身的优点,如参数可以灵活控制、代价小等。
长期以来,国内外雷达界同行在雷达杂波特性分析方面做了大量的工作,建立了一系列的杂波模型。
随着雷达新体制的不断涌现,对雷达杂波特性的研究也在不断的深入。
新一代AEW雷达采用相控阵和脉冲多普勒(PD)体制。
有关机载相控阵雷达杂波仿真问题,在以往的文献中已有涉及[115~117]。
其中,文献[115]对有关雷达杂波仿真的方法进行了较为全面和详细的介绍,文献[116]讨论了平面相控阵机载雷达二维杂波数据仿真的数学模型。
该模型考虑到了阵元幅相误差以及载机的姿态变化等因素,具有一定的通用性。
但该模型只假设杂波的功率谱为高斯分布,幅度上无起伏,而没有考虑非高斯过程。
文献[117]建立了比较了完整的杂波数据库,但该文也只重点讨论了二维杂波谱的特性。
由于我们的目的是进行CFAR检测方法研究,所以我们从另一个角度出发,重点讨论了杂波数据的概率密度函数,我们还给出了仿真杂波数据的幅度图和概率密度图以及一些结论。
本章主要对机载相控阵雷达在不同地类和不同起伏模型下的杂波进行建模与仿真,目的是建立起比较完整的杂波仿真平台和杂波数据库,为后续的CFAR算法研究提供支撑。
雷达系统中杂波信号的建模与仿真

1.雷达系统中杂波信号的建模与仿真目的雷达的基本工作原理是利用目标对雷达波的散射特性探测和识别目标。
然而目标存在于周围的自然环境中,环境对雷达电磁波也会产生散射,从而对目标信号的检测产生干扰,这些干扰就称为雷达杂波。
对雷达杂波的研究并通过相应的信号处理技术可以最大限度的压制杂波干扰,发挥雷达的工作性能.雷达研制阶段的外场测试不仅耗费大量的人力、物力和财力,而且容易受大气状况影响,延长了研制周期。
随着现代数字电子技术和仿真技术的发展,计算机仿真技术被广泛应用于包括雷达系统设计在内的科研生产的各个领域,在一定程度上可以替代外场测试,降低雷达研制的成本和周期。
长期以来,由于对杂波建模与仿真的应用己发展了多种杂波类型和多种建模与仿真方法。
然而却缺少一个集合了各种典型杂波产生的成熟的软件包,雷达系统的研究人员在需要用到某一种杂波时,不得不亲自动手,从建立模型到计算机仿真,重复劳动,造成了大量的时间和人力的浪费。
因此,建立一个雷达杂波库,就可以使得科研人员在用到杂波时无需重新编制程序,而直接从库中调用杂波生成模块,用来产生杂波数据或是用来构成雷达系统仿真模型,在节省时间和提高仿真效率上的效益是十分可观的。
从七十年代至今已经公布了很多杂波模型,其中有几类是公认的比较合适的模型.而且,杂波建模与仿真技术的发展己有三十多年的历史,己经有了一些比较成熟的理论和行之有效的方法,这就使得建立雷达杂波库具有可行性。
为了能够反映雷达信号处理机的真实性能,同时为改进信号处理方案提供理论依据,雷达杂波仿真模块输出的杂波模拟信号应该能够逼真的反映对象环境的散射环境。
模拟杂波的一些重要散射特性影响着雷达对目标的检测和踉踪性能,比如模拟杂波的功率谱特性与雷达的动目标显示滤波器性能有关;模拟杂波的幅度起伏特性与雷达的恒虚警率检测处理性能有关。
因此,杂波模拟方案的设计是雷达仿真设计中极其重要的内容,杂波模型的精确性、通用性和灵活性是衡量杂波产生模块的重要指标.2。
面向海军作战需求的作战仿真系统设计

面向海军作战需求的作战仿真系统设计作战仿真系统在现代军事演习和训练中扮演着重要角色。
特别是对于海军而言,作战仿真系统能够提供真实感的海上作战环境,使指挥员和士兵能够在仿真场景中进行训练和演练,以应对真实战场的挑战。
本文将就面向海军作战需求的作战仿真系统设计进行探讨和分析。
1. 系统需求分析在设计面向海军作战需求的作战仿真系统之前,首先需要进行系统需求分析。
通过与海军指挥官和作战人员的深入沟通,了解他们的训练需求和提高实战能力的目标。
在分析过程中,需考虑以下几个方面:1.1 仿真环境的真实感仿真环境的真实感是作战仿真系统设计的关键要素。
通过使用高清晰度的图像、逼真的音效和真实的物理模型,使得仿真环境能够完全还原真实的海军作战场景。
同时,系统应提供多样化的天气条件、不同时间段和各种地理环境,以增加训练的复杂性。
1.2 可扩展性和可定制性作战仿真系统应具备可扩展性和可定制性,以适应不同级别和不同类型的训练需求。
海军作战需要考虑到不同艘舰船、不同武器系统和各种作战环境的要求,因此系统应具备灵活的设置选项,能够根据用户需求进行快速配置。
1.3 实时反馈和评估功能作战仿真系统应能够提供即时的反馈和评估功能,以帮助指挥员和士兵实时调整行动策略和战术。
通过监测和记录战斗过程中的各种数据指标,系统能够生成详细的分析报告和评估结果,为作战人员提供必要的指导和建议。
1.4 多人协同作战能力海军作战通常涉及到多个舰艇和战斗单元的协同作战。
因此,作战仿真系统应具备支持多人协同作战的能力。
通过网络连接,不同作战人员能够实时进行各自的训练和演练,并能够在仿真环境中实现指挥、协调和沟通。
2. 系统设计与实现基于以上系统需求分析,下面将介绍面向海军作战需求的作战仿真系统的设计与实现方案。
2.1 仿真引擎的选择为了实现真实感的仿真环境,需要选择一款功能强大的仿真引擎。
常见的仿真引擎包括Unity3D、Unreal Engine等。
针对海面舰船目标的RBM和DBS雷达成像仿真研究

多普勒波束锐化(Doppler Be am Shar p en i n g,DBS)两 广泛的雷达目标σ起伏变化的情况。S w e rl i n g 按照两 种 假
种 雷达 模 式 的 舰 艇目标 成像仿真进行 研 究。由于 舰 艇 结 构 的 复杂型,其真实电磁散 射情况往往无法获得,对于此类复杂 目标 的 散 射 特 性 往 往 利 用散 射中心理 论 来 描 述。散 射中心理 论可以 表 述为:在高频区,目标 总的电磁散 射可以认为是某 些 局 部 位 置 上的电磁 散 射的合成,这些 局 部的散 射 源 称为 散 射中心。
设 的 起 伏 速 率 和 两 种目标 截 面 积 的 概 率 密度函 数 给出了4 种 模 型目标 起 伏 模 型。四种 模 型的 适 用范围如下。
(1)Swerl i ng I、II模型适用于由许多面积接近相等的、 独 立的起伏散 射体组 成的目标,其 概率分布为瑞 利分布。理 论上,独立散 射体的数目是无限的,而实际上,对于由4 个或 更多散 射 体 组 成 的目标,这 两类 模 型也 完 全 适 用。
狭长表面的导弹、火箭、带有延 长部分的人造卫星等
①作者简介:纪纲(1985,10—),男,汉族,江苏镇江人,硕士,讲师,研究方向:计算机科学与技术(仿真)、机械工程及其自动化、人工智能。 陈明(1984,9—),男,汉族,河北灵寿人,本科,助理工程师,研究方向:航空管制。
102 科技创新C导op报yrSciiegnhcet©an博d T看ec网hnologwywIwnn.obvaotoiokn aHner.alcd . All Rights Reserved.
摘 要:本文采用Swerling模型,设计一种针对海面舰艇目标的雷达成像仿真算法。由于海面与舰艇间形成的夹角以及海面与舰艇
机载雷达训练仿真系统结构与功能设计

机载雷达训练仿真系统结构与功能设计周易;谢彦宏【摘要】根据仿真系统设计思想,论述了机载雷达训练仿真系统间的相互关系.【期刊名称】《数字技术与应用》【年(卷),期】2011(000)002【总页数】1页(P27-27)【关键词】雷达;仿真训练;设计【作者】周易;谢彦宏【作者单位】海军飞行学院,辽宁,葫芦岛,125001;海军飞行学院,辽宁,葫芦岛,125001【正文语种】中文【中图分类】TN95机载雷达是作战飞机进行战场监视、火力引导与打击评估的关键设备。
机载雷达战术应用是超视距攻击敌方目标,保护自身安全的决定性因素之一。
但机载雷达价格十分昂贵,且需要载机升空才能进行各项操作训练。
研制机载雷达训练仿真系统,在不出动飞机的情况下进行机载雷达训练,可有效解决机载雷达教学训练需求,提高机载雷达教学训练水平。
1 、雷达仿真分系统综合考虑机载雷达教学训练所需,根据目标、载机、环境、雷达间的关系,对机载雷达进行仿真。
模块划分如图1所示。
天线模块:模拟生成雷达天线波束,根据雷达的工作模式模拟天线波束的扫描。
回波模拟模块:根据雷达工作参数和环境,调用杂波模块模拟生成各种噪声,调用目标模块,根据雷达方程和目标参数及特性生成目标回波,并将以上信号进行综合,供其它模块调用。
信号处理模块:调用回波模拟模块输出的信号。
通过与真实雷达相同的信号处理算法,将目标从杂波中检测出来,并解算目标的位置参数。
数据处理模块:建立对目标的跟踪,预判目标的运动趋势,将跟踪波门指向下一时刻目标的预测位置,通过下一次目标的真实位置参数修正波门,从而实现对目标的连续跟踪。
地面成像模块:调用地面散射特性数据,跟据地面距离和波束的擦地角计算地面各点的回波信号,从而产生地面回波图像。
2 、环境仿真分系统仿真生成雷达载机、各类目标、各种杂波、地形地貌等环境。
分为载机模块、目标模块、杂波模块、地形地貌模块(图2)。
载机模块:根据载机空气动力学模型,模拟载机的主要飞行参数,仿真生成载机的运动轨迹供其它模块调用。
雷达系统设计仿真报告
线性调频信号的复包络为:
u(t) = a(t)e jπμt2
其中 a(t) = 1, (t ≤ T / 2) 为矩形脉冲函数,T 是脉冲宽度。
正型模糊函数的定义为:
∫ χ (τ , fd ) =
+∞ u(t)u*(t + τ )e j2π fdt dt
−∞
将上述线性调频信号的复包络带入模糊函数定义式得:
为-30db 时的脉压结果。可以看出,旁瓣的降低是以波瓣展宽为代价的,但我们
仍能分清两个目标。
30 24
22
20
20
18
10
16
14
0
12
0
50
100
150
Dis/km
74
75
76
77
Dis/km
下面分别给出当导弹和飞机进入雷达时杂波的 RCS 随距离的变换。
最后给出了单个脉冲回波的 CNR,SNR,SIR 与距离的关系曲线。左侧为导
τ/μs τ/μs
contour pic 150 100 50
0 -50 -100
4dB contour
100
0
-100
-1
0
1
local zoom of upper 4dB contour
10
9.5
63096
0.63096 0.63096
-150 -1
0 fd/MHz
9 1 0.055
0.06 fd/MHz
正交采样的镜频抑制比曲线时,我按照书上 183 面图 5.3 的流程, 但我得到的结果总是不对,我一直分析这个问题,但始终没法解释, 为什么我得到的结果远没有书上 188 面的那么好? 2、 我在用 Monto Carlo 分析测角误差时,得到均方根误差效果远比书 上的好,我也想不明白,同样的参数,应该不会有那么大的差异。 3、 在最后一部分“某阵列雷达信号处理”中,采用的是老师给定的回 波信号。我的疑问是老师如何产生的回波信号?根据书上给定的条 件,我觉得只能得到杂波的功率谱特性,但是如何反映到时域波形 上呢? 4、 在用老师给定的信号数据进行处理时,我在脉压的时候耽误了很久, 因为我想相同的数据,处理的结果应该跟老师书上给的结果相差不 大,但是一开始我总是得不到老师书上的样子。后来我才发现,问 题在脉压系数上。通常脉压系数都是原线性调频信号的共轭反转, 但是,再利用老师给的数据进行处理时,不用共轭,只需反转即可。 我想着应该跟陈老师您采用的 LFM 信号形式有关,您产生数据时线 性调频基带信号的指数项上应该是负的 x(t) = e− jπμt2 ,不知道我的猜 想对不对?
SAR_雷达_建模__仿真
SAR雷达成像仿真摘要雷达发展初期由于分辨率较低,其作用主要是“点”目标的检测和跟踪。
而现代机载雷达系统则要执行更多任务,从目标检测和识别到大面积地形测绘。
地形测绘可通过合成孔径雷达(SAR)实现。
通过采用相干辐射照射地面并测量回波信号,SAR可以产生地表的高分辨率二维图像,其成像质量由系统分辨单元的大小决定。
分辨单元由系统的距离和方位分辨率共同决定。
高的距离分辨率通过脉冲压缩技术实现。
高方位分辨率取决于天线尺寸及雷达波长,可以通过雷达运动达到增加天线孔径从而提高方位分辨率的目的。
本文简介了SAR的发展历史,着重研究条带式状正侧视SAR的成像原理,建立点目标回波模型,重点讨论了其R-D成像算法,介绍了目前常用的其他成像算法,在频域内对该算法进行了距离徙动校正(RCMC),从而得到多点目标的Matlab仿真。
关键词:SAR 正侧视距离徙动校正成像ABSTRACTBecause of low resolution radar at the early stage of development, its main function is "point target detection and tracking". The modern airborne radar system to perform more tasks, from the target detection and recognition to terrain mapping in large area. Topographic mapping can be actualized by synthetic aperture radar (SAR) . By using the coherent radiation and measure the echo signal,SAR can produce high resolution two-dimensional image , its imaging quality depends on the system resolution cell size. Resolution unit consists of range and azimuth resolution .High range resolution is achieved through the pulse compression technique. High range resolution depends on the size of the antenna and radar wavelength,the carrier’s motion is used to increase the antenna aperture radar so as to improve the range resolution of the.This paper introduces the development history of SAR, focuses on the imaging principle of belt shaped side looking SAR, and establishes the echo model of point target. The paper mainly part focuses on the R-D imaging algorithm, and introduces some other common imaging algorithm.The algorithm of range migration correction(RCMC) is solved in frequency domain,thereby getting the several-point-target Matlab imaging simulation.Keyword: SAR Side looking Range migration correction ImagingI目录第一章绪论 (1)1.1 合成孔径雷达(SAR)的发展历程和现状 (1)1.2 现代SAR的发展方向及意义 (2)1.2.1 多参数SAR系统 (2)1.2.2 聚束SAR (2)1.2.3 极化干涉SAR(POLINSAR) (3)1.2.4 合成孔径激光雷达(Synthetic Aperture Ladar) (3)1.2.5 星载合成孔径雷达的小型化 (3)1.2.6雷达与可见光卫星的多星组网是主要的使用模式 (4)1.3 论文的内容及结构安排 (4)第二章合成孔径雷达的工作原理 (5)2.1 线性调频信号及其脉冲压缩 (5)2.2 方位分辨率 (6)2.3 SAR点目标回波模型 (8)第三章合成孔径雷达的成像算法 (10)3.1 运动补偿技术的发展及现状 (10)3.1.1 引言 (10)3.1.2 基于运动传感器补偿算法的发展 (10)3.1.3 运动补偿算法的发展 (11)3.1.4 基于回拨数据运动补偿算法的发展 (12)3.1 距离徙动 (12)3.2 距离-多普勒算法(R-D算法) (15)3.2.1 原始正侧视及其改进的距离多普勒算法 (15)3.2.2 斜侧视下距离多普勒算法 (17)3.3 其他SAR成像算法简介 (18)3.3.1 线性调空变平移算法(Chirp Scaling,C-S) (18)II3.3.2 距离徙动算法(RMA) (19)3.3.3 极坐标格式算法(PFA) (19)3.3.5 频域变尺度算法(Frequency Scaling) (20)3.3.6 各算法的比较 (20)第四章成像仿真及分析 (22)第五章全文总结 (27)致谢 (28)参考文献........................................................................................ 错误!未定义书签。
雷达回波建模与仿真作业
雷达回波建模与仿真作业雷达回波建模与仿真作业雷达回波的建模与仿真是雷达工程中非常重要的一步。
下面将结合实际应用场景,从模型建立和仿真过程两个方面续写。
一、模型建立1. 存在的问题雷达回波的建模是根据目标散射特性和雷达性能参数进行的,然而真实环境中目标复杂多变,雷达参数也会受到众多因素的影响,仅仅通过理论公式很难完全准确地描述回波信号。
2. 基于物理原理的模型建立为了更准确地建立回波模型,可以基于物理原理进行仿真模拟。
通过目标特性分析,将目标分解为若干个散射单元,根据散射单元的位置、极化方向、散射强度等参数,在各个方向上计算目标的散射截面。
考虑到雷达的特性,如发射信号的功率、波束特性、接收信号的增益等,通过波动方程或其他适当的数学公式计算目标距离、速度等参数。
将目标的散射截面和雷达参数结合起来,计算回波信号的功率、波形等,并进行合理的处理和修正。
3. 引入统计特性实际环境中的杂波干扰和噪声会对回波信号造成影响,在模型建立过程中可以引入各种统计特性。
可以考虑杂波的统计分布和功率谱密度,噪声的功率谱密度等,并结合雷达系统的性能参数,如信噪比、动态范围等,对回波信号进行更加真实的建模。
二、仿真过程1. 计算环境参数进行雷达回波的仿真前,首先需要确定仿真的计算环境参数。
包括雷达的工作频率、发射功率、天线增益等,以及目标和背景的散射特性,如目标的散射截面、背景材料的散射特性等。
2. 设定仿真场景根据具体应用场景的需求,设定仿真场景。
包括目标的位置、速度、方向等参数,在空间中随机或指定位置生成目标集合。
考虑随机性和多样性,可以引入目标的不确定性因素,如目标的姿态变化、形态变化等。
3. 进行回波仿真计算根据建立的回波模型和仿真的环境参数,进行回波的仿真计算。
针对每个目标,根据其位置、速度等参数,计算回波信号的功率、相位、波形等,并考虑噪声和杂波的影响,进行修正处理。
4. 仿真结果分析通过对仿真结果进行分析,可以评估雷达系统的性能。
舰载火控雷达交流伺服系统仿真分析
舰载火控雷达交流伺服系统仿真分析1.引言:介绍舰载火控雷达交流伺服系统和其重要性,同时介绍仿真分析的重要性和本文的研究目的。
2.系统概述:介绍舰载火控雷达交流伺服系统的功能和构成,讲解各个部分的作用及其工作原理,以及各个部分之间的关系。
3.数学模型:建立舰载火控雷达交流伺服系统的数学模型,并详细介绍模型各个部分包括传输模型、控制模型以及实际模型,以及这些模型的数学形式和物理意义。
4.仿真分析:基于建立的数学模型,使用Simulink建立舰载火控雷达交流伺服系统的仿真模型,对系统进行仿真分析,包括系统稳定性、系统响应速度、控制效果等指标的分析,并考虑与实际系统的误差。
5.结论和展望:总结本文的研究工作,分析仿真结果,提出结论,同时展望未来可能的改进和研究方向,为舰载火控雷达交流伺服系统的优化提供帮助。
第一章节是引言,主要介绍舰载火控雷达交流伺服系统的重要性以及本文的研究目的。
现代军事技术的快速发展和日益增强的国家安全要求,使得军事装备的精度和效率要求越来越高。
舰载火控雷达在现代军舰中扮演着重要的角色,能够对来袭目标进行探测和跟踪,并进行精确打击。
而舰载火控雷达交流伺服系统则是控制火控雷达瞄准机构的重要部件,直接影响着系统响应速度、稳态误差和动态误差等指标。
为了提高舰载火控雷达交流伺服系统的性能、优化系统结构,需要进行仿真分析来对系统进行评测和优化。
这种仿真分析的有效性在过去的研究中已被证明。
与其他测试和优化方法相比,仿真分析具有便利性和经济性,能够建立多种场景并对不同参数组合进行测试,以最小的代价实现全面的测试。
本文的研究目的是基于舰载火控雷达交流伺服系统的数学模型,建立系统的仿真模型,并对系统进行仿真分析。
通过对系统的仿真分析,评测系统在不同条件下的性能指标,比如系统响应速度、稳态误差和动态误差等指标,并与实际系统的误差进行对比分析。
最终,从模型分析的角度考虑如何优化系统的结构和性能,从而提高系统的效率和精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
结构的仿真和基于计算机仿真的作战对抗演练。 各 种兵力实体模型是海战场作战仿真系统的重要组成 部分, 是作战仿真演练的前提条件, 是关系战场仿 真逼真度的关键因素。而目前在兵力实体建模方面, 包括探测模型、 毁伤模型、 运动模型和作战模型等 由于缺乏有效的建模方法和基础数据, 建模难度非 常大, 成为研究的难点。
海战场作战仿真系统主要为海军装备研制过程 提供海战场中的兵力态势环境、 对先进概念和体系
收稿日期: 2009203226 修回日期: 2009205221 3 基金项目: “十一五”预研基金资助项目 (513060602) 作者简介: 罗 勤 (19782 ) , 男, 湖北武汉人, 硕士, 工
探测概率、 测量误差估计和滤波处理等功能模型的
数学算法进行研究和建模。
211 探测概率模型 (D PM )
雷达探测概率或称雷达截获成功概率定义为雷
达从发现目标或接收目标指示至转入稳定跟踪的过
程具有概率或统计特性, 在规定的指示精度条件下
转入跟踪成功的概率[1, 4 ]。
雷达对目标的探测概率可以表述为以下四项概
P R = 1- T A M TB F
(4)
212 测量误差模型 (M EM )
雷达输出的点迹或航迹数据中, 由于雷达的偏
差和量测误差, 存在着测量误差。 测量误差的来源
和种类众多, 既有雷达本身的安装误差、 精度误差
等导致的系统误差, 又有受随机干扰产生的量测误
差。按照D 1K1B a rton 的《雷达系统分析》中的结论,
需求, 可以建立不同种类、 不同粒度的雷达处理组
件模型, 在仿真使用中根据不同的需要由实体服务
器调用各种处理组件, 构建出不同的雷达系统。 本
文按照功能建模的方法对雷达系统模型进行划分:
雷 达 发 现 概 率 模 型 (D PM )、 测 量 误 差 模 型
(M EM ) 和数据滤波模型 (D FM ) 等。以下就雷达
雷达测量误差模型包括以下 3 个参数: 距离测
量误差; 方位测量误差; 俯仰角测量误差。 具体误
差分布如图 4 所示:
雷达测量的静态误差: 如机械 误差、位置误差、精度误差等 雷达传播的静态误差: 地球电
雷达各功能仿真组件模型以及其他兵力实体模 型均存储于实体模型库中。 实体服务器根据仿真需 要, 从实体模型库下载所需仿真模型组件, 配置各 功能模型, 组成雷达系统, 并驱动雷达系统的计算、 调度和显示功能。 为了使不同模型之间可以有机地 融合在作战仿真系统中, 使仿真模型具有可扩展性, 仿真模型的数据需要标准化, 模型也需要标准化, 使 模型能为不同作战仿真需求所用。 我们已经初步建 立了一系列标准规范和接口要求, 并依据这些规范 和标准构建了雷达仿真模型。 雷达系统的工作流程 图如图 2 所示。
)
dX
(2)
雷达的照准概率又分为方位、 距离、 俯仰角和
速度的四维概率。式 (2) 中的X 分别为这四维参数。
具体表述如表 1 所示:
表 1 四维照准概率参数表
方位照准 概率
距离照准 俯仰角 速度照准
概率
照准概率
概率
X = 1 2ΗA 0, s ∆B X = 1 2ΗE0, s ∆E 一般取 1 X = 1 2V T ∆V
引 言
海战场作战指挥系统的仿真建模和效能评估, 是装备研制和鉴定过程中的重要环节。 受装备、 场 地、 人员、 经费等诸多因素的限制, 要营造一个物 理的、能够呈现各种想定的作战环境是不可能的。在 这种情况下, 建立一套海战场作战仿真系统能够有 效节省经费和时间, 为技术和管理决策提供依据, 同 时也是弥补外场试验的不足的重要手段。
图 2 雷达仿真模型工作流程图
作参数和工作状态。显示模块负责各种配置设置, 资 源加载, 视频后期处理并显示雷达视频。 这样的雷 达系统又可以作为组件构建在一个作战实体平台 上, 作为一个作战单位的一部分, 比如舰艇, 使舰 艇具有探测能力。 112 实体模型类设计
如图3 所示, 模型之间按照子类与父类的关系, 把模型类组成一个层次结构的系统。 子类具有和父 类相同的数据和方法, 子类同时也可以拥有新的数 据和方法。实体模型将所有模型抽象为3 个基类, 即 实 体 类 En tity、 效 能 类 Effective 和 交 互 类 In teract ion。
率之积: ① 照准概率P A ; ② 发现概率P D ; ③ 截获
概率 P C; ④ 捕获目标期间的可靠度 P R。 即
P A C = P A ·P D ·P C ·P R
(1)
通常, 雷达的照准概率服从正态分布, 即满足
式 (2) :
P (X ) =
∫ 1
2Π∆
1 2
s
-
1 2
sexp
(-
X2
2∆2
雷达的类型各种各样, 从功能上分为跟踪雷达 和搜索雷达, 从用途上分为舰载雷达、 机载雷达和 岸基雷达等等。 各型雷达所需处理的信息可能有所 不同, 但基本的处理过程基本都是一致的。 根据雷
罗 勤, 等: 海战场作战仿真系统的雷达建模与仿真
(总第 35- 665) · 1 39·
达系统的工作原理, 并按照海战场作战仿真系统的
雷达测量误差包括 “缓变的”系统误差和 “快变
的”随机误差两部分之和[6, 7]。对于运动目标, 雷达
测量误差过程是一个具有均值趋势和时变方差的非
平稳随机过程; 其均值趋势部分描述的是雷达对运
动目标的跟踪滞后; 方差部分描述的是目标的角闪
烁; 自回归部分描述的是雷达信号处理引起的残差;
白噪声部分描述的是雷达接收机热噪声。
·138· (总第 35- 664)
火力与指挥控制
1 模型设计
111 模型系统结构设计 海战场作战仿真系统集成框架提供一个支持海
战场各系统综合集成、 协同工作、 无缝地交互和互 操作地公共仿真环境软件平台。其组成如图1 所示:
2010 年 第 4 期
图 1 海战场作战系统仿真集成平台
实际系统与概念系统接口适配器提供系统接口 转换, 交互式格式 协议调整编辑功能, 支持仿真单 元无缝集成进入仿真环境, 实现实物 半实物仿真节 点或其他系统开发的仿真节点加入本系统参加联合 仿真; HLA 联邦桥接器提供海战场作战仿真系统跨 联邦的仿真, 支持不同仿真系统的异地分布式仿真, 支持其他仿真联邦与本系统协同仿真; 仿真模型库 负责存储和管理各种仿真模型, 包括战场兵力实体 模型和海战场综合自然环境模型; 实体服务器按照 仿真需求从实体模型库中下载并配置各种兵力实 体, 驱动各种兵力实体, 并提供各兵力实体的交互 规则。
V o l. 35, N o. 4制
F ire Con tro l & Comm and Con tro l
文章编号: 100220640 (2010) 0420137204
第23051卷0 年 第4 月4 期
海战场作战仿真系统的雷达建模与仿真3
罗 勤, 陈 炜, 冯天昊
LU O Q in, CH EN W ei, FEN G T ian2hao
(W uhan D ig ita l E ng ineering Institu te, W uhan 430074, C h ina)
Abstract: Fo rce en t ity m odeling is the p ivo ta l p a rt in nava l ba t t le2field com ba t sim u la t ion1 B a sed on w o rk ing p rincip le of rada r sy stem , acco rd ing to the nava l ba t t le2field com ba t sy stem sim u la t ion and the rea l rada r sy stem , som e m a them a t ics m odels, such a s detect ion p robab ility m odel, m ea su rem en t erro r m odel and filter m odel, w ere summ ed up 1 T h rough the em u la t ion in stance, the test resu lt is co rrect and m eet s the requ irem en t of the ba t t le2field com ba t sy stem sim u la t ion1
雷达系统的工作流程图如图2。实体服务器从实 体数据库下载雷达模型, 根据仿真需求构建雷达系 统并启动实体运行。 雷达系统运行时首先根据数据 库中雷达的参数模型对雷达进行初始化和配置, 同 时启动网络管理模块, 负责调度雷达系统作为一个 节点加入或者退出仿真系统, 并负责和其他仿真节 点的交互。 雷达系统初始化完毕后根据功能配置完 成雷达探测等功能, 控制模块负责修改雷达的各工
Key words: nava l ba t t le2field com ba t sy stem sim u la t ion, rada r m odeling, D etect ion P robab ility M odel (D PM ) , M ea su rem en t E rro r M odel (M EM ) , D a ta F iltering M odel (D FM )
m
∑ P D =
Cmi
P
i d
(1-
P d)m- i
(3)
i= n
雷达的截获概率指雷达从搜索目标转为跟踪目
标的概率。与照准概率一样, 截获概率也由方位、仰
角、距离和速度四维概率决定。其形式与式 (2) 和