基于模糊控制的压力监控系统设计
基于模糊控制的畜禽舍环境监控系统的研究

因素之间缺乏必要 的联 系,且多数控制系统必须 由饲养管理 人员手动操作 或机 电式操作 ,自动化水平低 ,难以适应现代 化管理的要求 。 文采 用虚拟仪器技术 ,将传感器技术、 器 本 仪
文 编 o _3 8 0 ) — 2 _ 2 文 标 码l 章 号z o_4 ( 0 2 02 _ 10 22 61 4 0 _ 献 识 A
中 分 号l 8 . 圈 类 ¥19 8
基于模糊控 制 的畜 禽舍环 境监控 系统 的研 究
崔和璃 ,李 曼 。 高 ,
擅
蜂
(. 1 华北电力大学工商管理 学院 ,保定 0 10 ;2 天津大学管理学 院,天津 307 ;3 河北农业大学机 电工程学院 , 定 0 10) 70 3 . 00 2 . 保 70 1
CUIHe u ‘LIM a GAO n  ̄ ri , n, Fe g
(. c o l f uies miit t n N r iaEetcP we ies yB o ig0 10 ; .c o l f n gme tTaj iest 1S h o o B sns Ad nsr i , ot Chn l r o r v ri , a dn 70 3 2 S h o Ma ae n, ini Unvri , ao h ci Un t o n y Taj 0 0 2 3 Colg fMe hnc ln lcr a E gneig Hee r utrl nvri , a dn 7 0 1 ini 3 0 7 ; . l eo c aia adEe tcl n ier , bi i l a U iesy B o ig0 10 ) n et i poet a a e e t n rd c o f nm l u d g sp ri n o t lh n i n e ta o t l yt A s a t n r r o m rv h m n gm n a dp u t no i a b i i , u ev e dcn o t e v o m n nr s m i r d e o i a ln sa r e r , c os e s
基于模糊PID的分布式泵站监控系统设计

非线性 ,此外泵站系统运行参数也具有动态变化性。因
此, 固定参 数 的 PD控 制无 法 适 应 这 种 变化 , 致 控 制 品 I 导 质 变差 , 至 造成 系 统不 稳 定 。对于 参 数变 化 无 常 的供水 甚 系统, 模糊 控 制 能很 好地 体 现它 的优越 性 。但单 纯 采用 模
( 汉 市水 务 集 团有 限 公 司基 建 办公 室 , 武 湖北 武 汉 4 0 1 ) 3 0 8
摘 要 : 实现 对 泵站 的 有 效控 制 和 状 态监视 , 模 糊 P D控 制 引入 泵 站 供 水 系统 的控 制 , 为 将 I 通过 输 入 输 出量的 模 糊 化 ,
得 到水 压误 差 及误 差 变化 率 和 P D控 制 这 三参 数之 间的 模糊 控 制规 则 , I 实现 了泵 站 的模 糊 PD控 制 , 建 立 了 由从站 、 I 并
主 站和 上位 机 组成 的 分布 式 泵站 状 态监 视 系统 , 得 了很 好 的应 用 效 果。 取 关 键 词 : 糊 P D; 布 式控 制 ; 控 系统 ; 模 I 分 监 泵站
中 图分 类号 : P 7 T23
文 献 标 识 码 : A
文 章 编 号 :06 83 (00 2 —0 3 0 10 — 9 7 ห้องสมุดไป่ตู้ 1 )3 0 1— 2
采集 参 数 信 号 、 出控 制 、 现关 键 输 出 量 , 水 压 的 闭 输 实 如 环 控 制 。 上 位 机 负 责 系 统 泵 站 系 统 关 键 数 据 的监 视 , 实 现 对 状 态 数 据 的处 理 和分 析 、 据存 储 管 理 及 分级 报 警 、 数 故 障 诊 断 、 表生 成 等 。 报
Ab t a t o a h e e e f c i e c n r la d mo i rn fp mp sa in , u z I o to t o s p o o e o t e c n r lo s r c :T c i v fe t o to n n t i g o u t t s a f z y P D c n r lme h d i r p s d t h o to f v o o p mp sa i n . e f z y r l s b t e h ro n ro a e o t rp e s r r o y t e f z i c t n o n u n u p t u tt s o Th u z u e ewe n t e e r r a d e r r r t f wae r s u e a e g tb h u zf a i f i p t a d o t u i o v ra lsS h u z — I c n r l f p mp sa i n s r a ie Mo e v r a d sr u e n t rn n t rs se w i h i c u e a i b e . o t e f z y P D o t u t t s i e lz d. r o e , iti t d mo i i g mo io y t m, h c n l d s o o o b o s me sa e sa i n , se t t na d a mo i rn o u e ,ss t p I h sb e sn n p a t a i n rn u e t r fe t o l v t t s a ma t rsa i n n t i g c mp t r i e . a e n u i g i r c i lt a d b i g o t te f c . o o o u t c y b e Ke wo d : u z — I ; i t b t g c n r l mo i rs se ; u tto s y r s f z y P D d sr u i o to ; n t y t m p mp sa i n i n o
基于模糊控制规则的焦炉集气管压力智能控制策略
Ke wo d p e s r o e t g g ie f z y c nr l t a ib ef co f zy d e u l g r ls y rs r s u e o c l ci a p p u z o t h v r l a tr u z e o p i u e f n s ow i a n
维普资讯
冶
5 6
金
能
源
Vo . 7 No 4 12 .
ENERGY FOR ETAL M LURGI CAL I NDUS TRY
Jl. 0 8 uy 2 0
基 于模 糊 控 制 规 则 的焦 炉 集 气 管 压 力智 能控 制 策 略
李 桂 丽
( 宁科 技大学 计算 机学 院 ) 辽
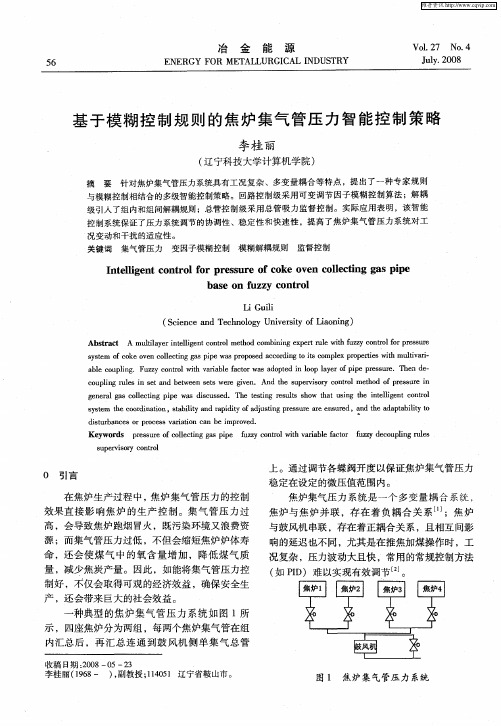
摘 要 针对 焦炉集气管压力系统具有工 况复杂 、多 变量耦合 等特点 ,提出 了一 种专家 规则
与模糊 控制相结合 的多级智能控制策 略。回路控制 级采用可 变调节 因子模糊 控制算 法 ;解耦
级引入了组 内和组 间解耦规则 ;总管控 制级采用 总管 吸力 监督控 制。实 际应 用表 明 ,该智 能
a l o p ig b e c u l .F z y c n rlw t ai b ef co sa o t d i o p ly ro i e p e s r .T e e n u z o to h v ra l a trwa d p e n l o a e p p r s u e h n d — i f c u l g r ls i e n ewe n s t w r ie . An h u e vs r o t lmeh fp s u e i o p i u e n s ta d b t e es e e g v n n d t e s p r ioy c n r t o o r s r n o d e g n r l a o e t g p p a ic se . T e tsi g r s l h w t a sn h n el e t c n r l e e a s c l ci i e W d s u s d g l n s h e t e u t s o h tu i g te it l g n o t n s i o
浅析基于模糊控制的高温试验压力机炉温控制系统

简 单 的 继 电 一接 触 器 控 制 , 电 一接 触 器 控 继
化 程 度 非 常 低 的 控 制 策 略 , 于 像 电 加 热 对 炉这样的 复杂控制对 象 , 经不 能满足 日 已 益发 展 的 工 艺 技 术 要 求 , 逐 渐 被 淘 汰 。 将 以 PI D算 法 为 核 心 的 各 种 形 式 直 接 数
控 制 的 一 般 步 骤 是 : 先 通 过 传 感 器 采 集 首 被 控 对 象 输 出 信 号 的 精 确 值 , 后 将 该 精 然
整 定 方 法 , 对 于 具 有 更 大 纯 滞 后 对 象 的 但 控 制 问 题 , 方 法 显 得 力 不 从 心 。 D控 制 该 PI 的 关 键 技 术 是 其 参 数 的 设 置 与 整 定 。 其 但 参 数 二 经 整 定 , 生 产 过 程 中 不 能 自 动 修 在
由e 模 糊 控 制 规 则 R( 糊 关 系 矩 阵 ) 据 和 模 根 推 理 的 合 成 规 则 进 行 模 糊 决 策 , 样 就 可 这 以得到模糊 控制向量为 。 2 3 模 糊控 制 器 的结 构 设计
文 章编 号 : 0 —9 ( 0 ) -O 1 1 1 7 41 2 1 1 0 6 0 2 0 —0 2
模 糊 控 制 器 靠 软 件 编 程 来 实 现 。 现 模 糊 实
统 控 制 方 法 有 继 电 一 接 触 器 控 制 、 D控 PI
制 、 适 应 控 制 。 电 一接 触 器 控 制 是 自 动 自 继
锅炉蒸汽压力模糊控制器的设计

力 在小 范 围之 内可 以看 成一 个 常数 。 将上 述式 1 式 2联立 , 与 可得 :
=
专Q(+ D ( 蒸 汽压力 对 象 的传递 函数 为 : 一 专) 3 )
G( ) = o s
我们 在这 里 先讨 论 在 D不 变 的条 件 下 , 是 就
B0I ER MANUF L ACTURI NG
文 章 编 号 :N 3—14 ( 00 0 0 1 0 C2 2 9 2 1 )2— 06— 4
锅 炉 蒸 汽 压 力 模 糊 控 制 器 的 设 计
杨 瑞 星
( 神华陕西 国华锦界 能源有 限责任公 司, 陕西 榆林 7 9 1 ) 13 9
Ab t a t Th r sa co e c u ln e n we n t e se m r s u e b a ey o co sdu i g te sr c : e e i l s o p i g b ti e h ta p e s r y a v r t ff t r rn h i a b ie o usin.I hi a e ,a c r i gt un i g e p re c o lrc mb to n t sp p r c o d n o r n n x e n e,f z y c nr le su e oc nr l i u z o tol ri s d t o to p e s r o to o s l e se m r su e c n rlp o lms,a d smu ain r s lss o t a h t — rs u ec nr lt ov t a p e s r o to r be n i lto e u t h w h tt e meh o a o a iiy d h s s me v l t . d Ke r y wo ds:ta p e s r f zy c n r l r f z y r ls se m r s u e;u z o tol ;u z e e u
基于模糊控制的的总线型温度监控系统的设计

中 图 分类 号 : 2 3 TP 7 文献标志 码: A 文 章 编 号 :0 35 6 (0 0 0 —3 50 10 —0 0 2 1 )912 —4
De i n o h e pe a u e m o t r ng s s e sg ft e tm r t r nio i y t m b s d n f z y c nt o nd fe db s a e o u z o r la i l u
p icpeo h r s n e nt rn y tm n h e in o o t r n a d r. Th y tm s rn il ft ep e e td mo io ig s se a d t ed sg fs fwa ea d h r wa e es se i
现场 总线等技术 , 设计 了一种实时温度 监控 系统 , 绍 了该 监控 系统 的工作原 理及软 硬件设 计 , 介 在结 构上分 为上位机监控 单元 和现场控制单元 , 在温度 的控制方面设计了一种 由软 件实现 的模糊 PD控 制器 , I 上位机 与
现场 控制单元 采用 c AN总线 进行 通信 。
{ J I 目
基 于模 糊 控 制 的 的总线 型 温 度 监 控 系统 的设计
温 阳 东 , 高震 宇 刘 思 邦
( 合肥工业 大学 电气与 自动化工程学院 , 安徽 合肥 200) 3 0 9
摘
要: 温度是工业生产 中的重要参数 , 温度控制对生产 起着至关 重要 的作 用 。文章应 用了模糊 控制算法及
W EN n - o g, GAO h n y Ya g d n Z e - u, L U i a g I S— n b
压力模糊PID控制系统设计DOC
第一章工程设计概述1.1 论文设计的背景1.1.1 国内外工厂主蒸汽压力控制的简介及现状随着工厂锅炉机组越来越向着高参数、大容量的方向发展,对热工自动控制系统的控制品质的要求也越来越高。
从30年代起,锅炉控制中就采用了PID控制器。
目前,国内的锅炉燃烧控制仍然大多采用常规PID控制器,或者为了改善控制效果,加一些前馈控制。
控制方法远远落后于国外的控制技术,尤其是北欧国家和德国。
锅炉是经济发展时代不可缺少的商品,未来将如何发展,是非常值得研究的。
而这一切都离不开对压力控制系统的研究。
而国外一些发达国家在控制系统这方面的研究更是非常的重视,而且在高科技技术的背景下,更是取得了相当大的成果。
在国内无论是燃烧过程自动控制系统、汽包水位自动控制系统,还是主蒸汽压力自动控制系统等,主要都是采用各种类型的常规PID控制策略,也就是说PID控制在化工厂的大大小小的控制系统中仍占着主导地位。
多年来,虽然PID控制在化工厂热工过程控制中发挥了很大作用,在一些机组的某些控制系统上也有令人满意的控制效果,但是,由于PID算法本身的限制,在某些复杂对象上应用时,控制效果很不理想,甚至无法实现自动控制。
究其原因,主要是因为PID控制实施有效的前提是要有准确的被控对象模型。
当实际被控对象模型发生变化时,按照原被控对象模型进行参数整定的PID控制器的控制效果就很难保证了。
而且在实际的工程应用中,被控对象的模型往往是不精确的、时变的,有时甚至根本无法获得,这时采用常规的 PID控制就很难达到理想的控制效果。
也就是说面对越来越复杂的被控对象,常规PID控制己束手无策,要想获得好的控制效果,必须采用其它的控制策略。
英国科学家马丹尼E.H Mamdani首先应用模糊控制方法来控制用于试验的锅炉和汽轮机;美国德克萨斯州的某化工厂工业锅炉及所有蒸汽回路都采用了EXACT,蒸汽消费量减少了15%;在燃油锅炉上应用最优控制,自适应控制等现代控制技术的例子也有多次报道[1]。
基于DSP的无刷直流电机模糊PID控制系统设计
中图 分 类 号 :T 23 P 7 文献标识码 : B
De i n o u z D o r ls s e f b u h e s sg f f z y PI c nt o y t m o r s l s
Ke wo d :DS BLDCM ; z y PI y rs P; Fu z D
O 引 言
随着各种 处理器 的出现和 发展 , 国内外 对无刷 直流 电
机控制系统 的研究也在 不断 的发 展和完 善 , 目前无 刷直 流 电机控制器 的结构有 多种形式 , 由无 刷直 流 电机 专用 集 如 成 控制芯 片实现 , 以单片机 为核心组成 的数 字控制 电路 实 现 , D P芯片为核 心实现 等 。在 系统 控制 算法 方 面 , 以 S 国 内外许多研究 人员也作 了大量 的研 究 : 的提 出了 内模 控 有
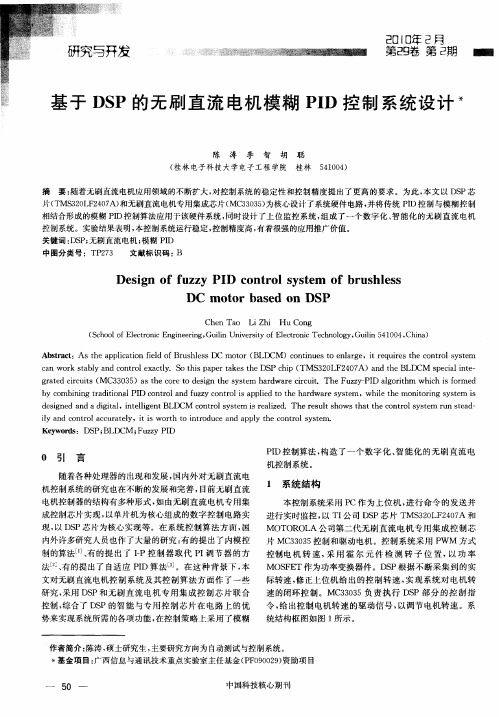
片( TMS 2L 2 0 A) 3 0 F 4 7 和无刷直流电机专用集成芯片( 30 5 为核心设计 了系统硬件电路 , MC 3 3 ) 并将 传统 PD控制与模糊控制 I 相结合形成的模糊 PD控制算法应用于该硬件系统 , I 同时设计 了上位监控系统 , 组成 了一个 数字化 、 能化 的无刷 直流 电机 智 控制系统 。实验结果表明, 本控制系统运行稳定 , 控制精度高 , 有着很强的应用推广价值。
Ab ta t sr c .Ast ea p ia in fedo u h e sDC mo o ( h p l to il fBr s ls tr BLDCM ) c n iu st na g 。i rq ie h o to y tm c o t e o e lr e t e ur st ec n r ls se n c n wo ksa l n o to x cl .S h sp p rtk st eDS h p ( a r t bya dc n r l a ty ot i a e a e h P c i TM S 2 L 4 7 )a d t eBL X2 p ca n e e 3 0 F2 0 A n h I M s e ilit— g ae ic i ( C3 0 5 st ec r o d sg h y tm a d r ic i.Th z yPI ag rt m ih i o me r td cr ut M s 3 3 )a h o et e in t es se h r wa ecrut eFu z - D lo ih wh c sfr d
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
维普资讯
1 0期
刘云芳 ,等 :基 于模 糊控 制的压力监控系统设计
24 23
参数 由压力传感器转换为压力信号经放大保持 电路 送人 A D模数 转换 部分 , / 将模 拟 电信 号转 换 成 数字
信号 并送 人单 片机 , 片 机 通 过 P 单 C机 与 单 片机 的 通信将 被测 压力 参 数 送 人 P c机 并 在 P c机 上 显 示 出来 , 同时 ,c机 上 的模 糊 控 制 算法 程 序 对 送 来 的 P 压力 参数 进行判 断 并 生成 相 应 的模糊 控 制 量 , 糊 模
础的单片机压力监控 系统能方便地对数学模型未知的非线性 系统进 行 实时监控 , 能够运用 于诸如水塔 恒压供水等 实际 问题
中去。
关键词
模糊控制
压 力监控
A 8C3 T 9 5 A
中图法分类号
T 23 4 文献标识码 P7. ;
在工业 生产 和生 活 中 , 常遇 到 一 些数 学 模 型 未
1 设计的理论基础
1 1 模糊控 制 .
主机和终端通信方式采用 的是异步串行通信来
进行 数据传 输 。通过 R 22接 入 P S3 c系统 。在监 测 终端 利用 A 8 C 2中的 内部 的定 时 器 1作 为 波 特 T9 5 率产 生装 置 , 通过 设 置定 时器 的 初值 ( L ,H1 来 T 1T ) 实现 波特 率 的 转 变 。主 机 方 面 通 过 调 用 MS O C MM 组件 的 i u 和 otu 来 收发数据 。 n t upt p
维普资讯
第 7卷 第 1 0期 20 0 7年 5月 17 —8 9 2 0 )024 -5 6 11 1Βιβλιοθήκη (0 7 1—2 20 科
学
技
术
与
工
程
⑥
Vo. N . 0 Ma 0 7 17 o 1 y2 0
S in eT c n lg n gn e i g ce c e h oo y a d En i e rn
加 以隔离 , 干扰 信号极 易窜 人测控 系统 中 , 造成 系统
失控 。
继 电器控 制 的外 部 设备 电路 图
V ’’ r r
控制量通过 P c机与单片机通信经单片机后送人控 制部分, 最后由控制部分根据模糊控制信号完成对
被测 物体 的压力 模糊 控制 。 2 2 数模 转换 电路 .
2 5 控制 电路 .
继 电器控制 的外 部设 备 电路 —— 光 电隔离 电路
如图 2 所示 。单片机测控系统输出的开关信号是通 过芯片给出的低压直流电平信号, 这种 电平信号的 负载能力 比较低 , 不能直接驱动外部设备 , 要经过转 换之后才能应用于外设 的启闭。由于外设的功率都 比较大 , 在启闭过程中会产生电磁干扰信号 , 如果不
20 SiTc. nn . 0 7 c . eh E gg
基 于 模糊 控 制 的压 力监控 系统设 计
刘云芳 廖继 旺
( 湖南工业职业技术学 院, 长沙 40 0 湖南信息职业技术学院 长沙 40 0 ) 1 20; , 12 0
摘
要
城市供水等的压 力监控 系统属于非线性系统, 使用传统的控制方法很 难实现有效控 制, 以计算机模 糊控 制理 论为基
1 2 系统终 端 .
知 的复杂 的非线性 的压 力监 控 系 统 , 普通 的压 力 监 控 系统 就 很 难 实 现 有 效 的控 制 ¨ 。本 文 提 出基 于 J 模糊 控制 的压力实 时监 控系统 , 使用压 力传 感器 、 以 A 8 C 2单 片机 和 P T9 5 C机 为 控 制核 心 , 能解 决 譬 如 水塔 恒压供 水等 实 际问题 J该 系统 可 以方 便 地 实 ,
用 模糊集 合理论 将其 量 化 , 控 制器 模 仿 压力 操 作 使 的策略 , 即演变 出 以模糊 集 合 理论 为 基 础 的模 糊 控 制器 。所 以 , 力控 制 系统 采用 模 糊 控 制方 法 是 j 压
一
2 系统硬件设 计
2 1 系统 工作原 理 .
种非 常有效 的控制 策略 。
系统 主要 由传 感 器 、 大保 持 电路 、 / 放 A D模 数
转换 、 单片机、C机与单片机通信 、 P 控制系统 、C机 P
2O 07年 1月 4 日收 到
第一作者简介 : 刘云方 , n l l 6 .o 。 y f l @1 3 cr u  ̄gu n
等部分组成, 主要实现 的功能就是通过模糊控制 的 理论来实现对压力和信号 的监控 , 被测物体的压力
模糊 控制是 对无法 精确建 立受 控对象 数学模 型 的情 况下 , 以人 的控制经 验作 为控制 的知识 模型 , 以 模糊 集合 、 模糊语 言 变量 以及 模糊 逻 辑 推 理作 为 控
制算法的一种智能控制方法。对于压力控制系统而 言, 将控 制经验 归纳为 定性描 述 的一组条 件语句 , 运
控, 还可 以与 P C机 通信 , 而实 现压 力 监 控 系统 的 从 远 程控制 、 分析 、 决策等 功能 。
入单片机 , 由单片机通过串行通信送给计算机 , 并在 主机上 实时 显示压 力 参 数 , 时进 行 模糊 控 制 和 数 同
据保存 。
1 3 单片机 与 P . C机 的通信
现对 数学模 型未 知 的、 杂 的、 复 非线性 系统 的实时 监
系统终 端选用 A E L公 司 的 8 C 2单 片机作 TM 95 为 主控 制器 , 实现对 被控 数据 的采集 和模糊 化处理 , 以及与 P c机 ( 上位机 ) 的双 向通信 和 对控 制 部分 发
送经过清晰化处理的模糊控制信号。系统终端的压 力采集由压力传感器来完成 , 实现对被测物 的压力 参数的采集 , 通过放 大器对转换得到 的电量进行处 理, 然后通过 A C 89 D 00 将模拟信号转换成数字量送