驼峰调车控制
铁路驼峰自动化的车辆速度控制系统
铁路驼峰自动化的车辆速度控制系统摘要:随着我国铁路驼峰溜放作业综合自动化技术的发展,驼峰调车场尾部停车防溜作业自动化程度得到大幅度提高,我国铁路编组站整体装备技术处于世界领先水平。
但是,由于调车场溜放车组受停车设备、线路坡度等各类因素影响,尾部停车防溜效果仍有待提升,同时尾部停车器布置方案在设计规范上还有所欠缺。
为此,通过仿真技术,改变尾部停车防溜设备布置方案,让勾车在仿真平台上溜放,以更好地为尾部停车防溜设备布置方案提供技术支持。
关键词:铁路;驼峰自动化;控制系统自动化技术是一门综合性技术学科,涉及计算机技术、信息技术、控制技术、系统工程、电子技术等多方面内容,而其中最重要的则是计算机技术和控制技术。
在铁路行车作业过程中,铁路信号设备担负着举足轻重的作用,其信息传输的功用,是列车行车组织与管控的重要依据,决定着列车运行的安全性、高效性。
一、实现铁路电力自动化的意义当铁路在运输时,如果出现停电等问题,那么就极有可能会导致行车车间与列车相互间的联系被中止,进而导致铁路不能正常运作,或半道停运,使得旅客的生命安全与资产安全遭到巨大威胁,造成经济亏损。
由于我国领域广阔,土地种类丰富,铁路运输一般会跨越高山、长河等等,环境条件情况糟糕,导致铁路路线极其繁杂,交通便利性不高。
如此的时机情况让铁路电力线路极易阐述问题。
如果说,在繁杂的地形范围中产生电力问题,那么维修人员就必须要付出非常多的时间来检查问题出处,同时还需要投入众多的人力、物力以及资金来解决电力问题。
此类状况的产生会让铁路运作供电的可靠性遭到极其大的影响。
所以,若要降低或防止此类故障的出现,那么就必须要尽快地强化铁路运输的所有设施设备的安全性、可靠性。
在铁路建设过程中,依靠技术,把自动化技术充分地运用到铁路电力系统的构建中,以此明显地强化铁路电力自动化水准。
二、铁路电力系统对控制技术的要求2.1信息化要求随着科学技术的发展,铁路电力系统对于信息化的要求越来越迫切。
铁路驼峰调车作业

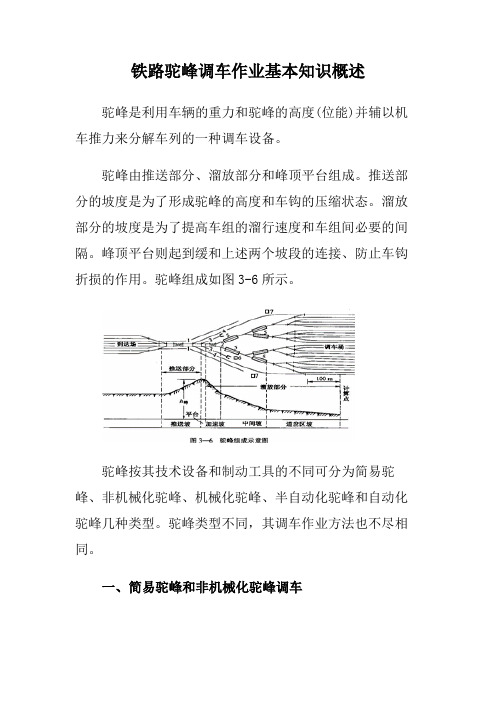
铁路驼峰调车作业驼峰是利用车辆的重力和驼峰的高度(位能)并辅以机车推力来解散车列的一种调车设备。
驼峰由推送部分、溜放部分和峰顶平台组成。
推送部分的坡度是为了形成驼峰的高度和车钩的压缩状态。
溜放部分的坡度是为了提高车组的溜行速度和车组间必要的间隔。
峰顶平台则起到缓和上述两个坡段的连接、防止车钩折损的作用。
驼峰组成如图3-6所示。
驼峰按其技术设备和制动工具的不同可分为简易驼峰、非机械化驼峰、机械化驼峰、半自动化驼峰和自动化驼峰几种类型。
驼峰类型不同,其调车作业方法也不尽相同。
一、简易驼峰和非机械化驼峰调车简易驼峰一般是在原有牵出线的基础上修建的,它具有投资少、修建快、调车效率和安全都比牵出线好等优点。
简易驼峰峰高约1.5~2.0m,设一股推送线和一股溜放线,调车场头部平面为复式梯线形或非对称线柬形布置,设置的道岔采用电气集中或人工就地操纵,峰下咽喉区不设制动位,调车场内使用铁鞋制动。
简易驼峰一般设置在区段站或小型编组站。
非机械化驼峰调车场头部一般采用对称道岔和对称形线束布置,道岔控制采用驼峰自动集中或电气集中,峰下咽喉区未设车辆减速器制动位,只在调车场使用铁鞋制动。
非机械化驼峰一般设在调车线路少、改编作业量不大的编组站上,现在几乎没有了。
简易驼峰和非机械化驼峰的调车作业指挥方式、溜放车组速度的控制方法基本相同,一般都未设车辆减速器,调车线上的目的制动都采用铁鞋和手制动机制动。
二、机械化驼峰调车机械化驼峰调车是由专门的机电设备或工具来控制驼峰调车场指挥调车和溜放作业。
机械化驼峰的峰高一般在3m1)A上,并具有合理平纵断面的驼峰咽喉和调车线路,峰下咽喉采用6号或6.5号对称双开道岔,调车场成对称式线束形布置,一般设有两条推送线和两条溜放线,并设有禁溜线和迂回线,峰下咽喉区设有车辆减速器等调速装置。
机械化驼峰调车作业主要是解体作业。
根据机械化驼峰设备和使用的调车机车台数的不同,调车作业组织可采用以下几种方案:(一)单推单溜具有一条推送线和一条溜放线,使用一台调车机车工作,并担任峰下调车场的整理工作。
铁路驼峰调车作业基本知识概述
铁路驼峰调车作业基本知识概述驼峰是利用车辆的重力和驼峰的高度(位能)并辅以机车推力来分解车列的一种调车设备。
驼峰由推送部分、溜放部分和峰顶平台组成。
推送部分的坡度是为了形成驼峰的高度和车钩的压缩状态。
溜放部分的坡度是为了提高车组的溜行速度和车组间必要的间隔。
峰顶平台则起到缓和上述两个坡段的连接、防止车钩折损的作用。
驼峰组成如图3-6所示。
驼峰按其技术设备和制动工具的不同可分为简易驼峰、非机械化驼峰、机械化驼峰、半自动化驼峰和自动化驼峰几种类型。
驼峰类型不同,其调车作业方法也不尽相同。
一、简易驼峰和非机械化驼峰调车简易驼峰一般是在原有牵出线的基础上以抬高牵出线,平地起峰修建而成的,它具有投资少、修建快、调车效率和安全都比牵出线好等优点。
简易驼峰峰高约1.5~2.0m,设一股推送线和一股溜放线,调车场头部平面为复式梯线形或非对称线束形布置,设置的道岔采用电气集中或人工就地操纵,峰下咽喉区不设制动位,调车场内使用铁鞋制动。
简易驼峰一般设置在区段站或小型编组站。
非机械化驼峰一般设有2条推送线和1条溜放线,调车场头部采用对称道岔和对称线柬形布置,道岔控制采用驼峰自动集中或电气集中,峰下咽喉区未设车辆减速器制动位,只在调车场使用铁鞋制动。
非机械化驼峰一般设在调车线路少、改编作业量不大的中、小型编组站上。
简易驼峰和非机械化驼峰的调车作业指挥方式、溜放车组速度的控制方法基本相同,一般都未设车辆减速器,调车线上的目的制动都采用铁鞋和手制动机制动。
在调车作业方面有以下特点。
1.简易驼峰调车作业和平面牵出线调车作业相比具有的特点(1)车辆溜行的动力:在平面牵出线上,车辆溜放至指定的线路,完全依靠机车的推送力;而简易驼峰调车主要依靠车辆本身的重力(即利用驼峰的位能高度),调车机车的推送力只起辅助作用,在必要时利用调车机车的推送力来弥补峰高的不足。
(2)提钩地点:平面牵出线调车过程中,溜放作业的进程逐钩移向调车场,提钩地点是不固定的;而在简易驼峰调车作业中,车辆的提钩地点基本上固定在压钩坡至峰顶这一区域内进行。
驼峰调车自动化简介

组最左端车组(端组)“32”下落列(即第三列)占用11道, 这样,端组就可以留在原线路,无需牵出。达到省钩、省 线的目的。其余的二、四暂合列所在的车组借用10道,第 一列下落的车组占用9道,如表3-17所示。
(3)溜放进路的办理有单办和储存两种方式。按编组调 车作业计划人工储存钩序后,微机集中自动排列进路, 在储存和溜放过程中,能对储存进路加以修改。在储存 进路的同时,还可以办理其他调车进路。如与现车管理 系统联机,即能按其发来的调车作业计划自动储存钩序。
用发布式控制的自动化驼峰,多使用微型计算机。计算机 利用本身高速运算能力,实时地通过各种接口,将现场的 各种状态采集到机器内加工成命令输出,实现对车组速度 的控制;同时,计算机还利用它强大的逻辑功能对采集的 数据进行分析,实现对多种设备状态控制过程的监测。
(2)测重设备。 测重设备设在峰下第一分歧道岔入口前,用于测定溜
放车组重量等级(一般分为四级),通过电子计算机加工, 变成控制减速器的命令输出。
(3)测速设备。 测速设备用于测定溜放车组在减速区段的实际速度,
与车辆减速器给出的出口速度进行比较,为计算机自动控 制车辆减速器对车组施行制动或缓解提供数据。车组溜放 速度一般采用雷达进行测量。
(4)踏板。 一般在峰下测重区段装有两块踏板,作为测定车
(4)具有检错、诊断、记录、打印、报警等功 能;便于查找、分析故障,利于维修;屏幕显示 清晰明了。继续保持原有6502电气集中设备,与 微机集中设备互为替代。当微机集中发生故障后, 通过切换电路,仍可由6502电气集中进行控制。
铁路行车组织
溜放进路自动控制系统从现车管理自动化系统主机 调入解体调车作业计划通知单后,由驼峰调车长用键盘 命令指定解体车次,该车次的解体调车作业计划自动输 入溜放进路控制机储存,从而实现溜放进路自动预排。 驼峰调车长可以在溜放前和溜放中修改调车作业通知单 内的系统或进路,并按修改后的顺序开通进路。
(完整word版)驼峰调车系统简介
驼峰调车控制系统驼峰调车控制系统(hump marshalling control system)为在驼峰调车场上控制货车溜放进路和溜放速度,实现车列自动分类解体和编组进行自动控制的系统。
它主要包括调车场头部溜放调车控制和峰尾调车进路控制两部分。
头部溜放调车控制又分为驼峰指挥系统(驼峰信号及其他调车信号联锁设备)、机车推峰速度控制、货车溜放进路控制以及货车溜放速度控制。
峰尾的集中联锁及平面溜放控制目前尚未纳入整个驼峰调车自动化系统中。
发展随着驼峰的出现和发展,驼峰调车控制技术也日益完善.自1952年在美国印第安那州的Kirk建成用模拟计算机自动控制车组溜放速度的驼峰信号系统后,1964年在美国伊利诺依州Gatewag 建成用数字计算机控制推峰机车速度和车组溜放速度的车列解体编组自动控制系统。
与此同时,各国也相继发展驼峰调车技术和设备,使驼峰调车的作业效率和安全程度得到不断提高。
中国于1983年在南翔编组站下行调车场建成第一个自动化驼峰·1989年,郑州北站综合自动化系统投入使用,相继完成了石家庄编组站综合自动化,丰台西编组站下行场、株洲北编组站上行场和苏家屯编组站上行场、阜阳站等驼峰调车控制自动化。
这些系统在功能和设备上配套完善,在技术水平上已达到20世纪90年代国际水平。
分类按技术设备可分为非机械化驼峰调车控制、机械化驼峰调车控制、半自动化驼峰调车控制、自动化驼峰调车控制.非机械化驼峰调车控制,溜放进路采用集中控制或继电自动集中,调速工具以铁鞋为主。
机械化驼峰调车控制,溜放进路采用继电自动集中或溜放进路自动控制,调速工具以人工控制大能力的车辆减速器为主,制动铁鞋为辅。
半自动化驼峰调车控制是在机械化驼峰调车控制的基础上,在调车线上增设1至2个目的制动用的车辆减速器,用半自动控制机控制车辆减速器,有些驼峰调车场还安装了减速顶或推送小车。
自动化驼峰调车控制是利用计算机控制机车推峰速度、货车溜放进路、货车溜放速度的系统.这种系统可以由一台大型计算机集中控制,也可按功能由多台微机分别控制(分布式系统)。
铁路驼峰调车作业

铁路驼峰调车作业一、驼峰调车基本原理驼峰是利用车辆的重力和驼峰的位能(高度),辅以机车推力来解散车列的一种调车设备。
利用驼峰来解散车列时,调车机车将车列推上峰顶,摘开车钩后,车组凭借所获得的位能和车辆本身的重力向下溜放,如图2—18所示。
二、驼峰调车作业程序在驼峰上解体车列时,都要经过挂车(牵出)、推峰、溜放和整理等作业程序,如图2—19所示。
1.挂车(牵出):驼峰机车从峰顶或从等待作业的地点按调车作业计划驶至到达场连挂待解车列。
在到达场与调车场横向配列的车站,还需将车列牵引至峰前牵出线。
2.推峰:驼峰机车根据驼峰信号机的显示,将车列推送至峰顶驼峰主体信号机前准备解体。
在采取双推单溜作业方案的驼峰,还包括将车列预推至驼峰信号机前等待。
3.溜放:按照驼峰色灯信号机的显示要求,进行定、变速推峰,对车列进行解体,使被摘解的车组脱钩,依靠车辆本身的重力自行溜向调车场内指定的线路。
在溜放的过程中,还包括向禁溜线取送禁溜车(或暂时存放在迂回线)的作业。
4.整理:驼峰分解一个(或几个)车列后,机车将禁止溜放的车辆从禁溜线上取出,通过迂回线送至峰下调车线,并在调车线进行整理作业,消除车组之间的“天窗”和线路的“堵门车”,为下一批驼峰分解车列打好基础。
当采用双推双溜作业方案时还有交换转场车作业。
三、影响驼峰解散车辆走行的因素1.车辆或车组的走行性能。
车辆的走行性能取决于车辆走行部分各部件的状态及油润情况,还取决于车种、车型、载重、气候条件及线路状况等,根据车辆走行阻力的大小可分为易行车和难行车。
易行车——惰力大、运行阻力小的车辆。
如装载油、钢、煤、粮等重质货物的车辆;难行车——惰力小,运行阻力大,行走比较困难的车辆。
如空车及装载轻浮货物的车辆。
2.线路运行阻力。
根据线路阻力的大小,可将调车线分为难行线和易行线。
难行线——经过道岔多、曲线多,或者线路内溜行方向为上坡(反坡),阻力较大,车辆溜行比较困难的线路。
易行线——经过道岔、曲线较少,或线路内溜行方向为下坡(顺玻),阻力小,车组容易溜行的线路。
驼峰调车调速工具
间隔调速的数学模型:
t2 T0 t1
t1 前行车从进入减速器入口到分岐道岔轨道区段出口的走行时间.
t2 后行车从进入减速器入口到分岐道岔轨道区段入口的走行时间.
T0 前后车组进入减速器的时间间隔.
最低限度: t2 t1 T0 K
即: 2l1
2l2
K
V1 V2 V2 V2 2al2
一、影响推送速度V0的因素
尽可能的提高推送速度,以提高解体效率。
(一)车组长度
当以恒速V0推送车列时,相邻车组通过峰顶的间
隔为t0
t0
ln ln1 2V0
其中, ln和ln1为相邻车组的长度.
当间隔为t0确定后,车组越长,推送速度越高。例如: 1-5辆的车组: V0=5km/h 6-10辆的车组: V0=6km/h 10辆以上的车组: V0>=7km/h 还要考虑其它因素,加以修正。
一、影响推送速度V0的因素
(二)车组的溜放距离 对于溜放距离远的车组以较高的V0 对于溜放距离近的车组,考虑到减速器的能
高后,以较小的V0 (三)相邻车组分岐道岔的位置
相邻车组分岐点近,共同走行的距离短,容 易保持间隔,可适当提高V0
相邻车组分岐点远,共同走行的距离长,不 易保持间隔,后车的V0要低一些。
整理得:V23 AV22 BV2 C 0
间隔调速的数学模型 为一个三次方程,在线实
时计算比较困难。实际应
用时,考虑各种因素,事 先计算好出口速度等级。
(二)目的调速的基本概念
由调速工具对溜放车组进行调速,使其以 计算出口速度离开调速位。
V出 V允2 2g'L(a ) *103 其中V允 允许的安全连挂速度 g' 取9.5m / s2 a 线路坡度 车辆单位重量所受的阻力 L 减速器出口至连挂前所运行的距离
驼峰调车ppt课件
统
13
驼峰的作业任务 解体车列,在解体中照顾编组,必要时也协助
峰尾牵出线进行编组作业。
驼峰调车的特点:
(1)调车的动力; (2)提钩的地点; (3)溜放速度控制; (4)车组间隔的调节;
14
二、驼峰解体作业的过程
由挂车、推峰、溜放、整理车场四个环节组成。
图1-3-3 驼峰解体车列的作业过程图
15
Ⅰ.单推单溜驼峰作业方案
只需一台机车连续的进行挂车、推峰和溜放,适用于 改编能力不大的编组站。
17
Ⅱ.双推单溜驼峰作业方案 两条推送线、一条溜放线、两台调车机车的作业。适用于 衔接方向较多、车列的车流构成较复杂,改变作业量较大的 编组站。 双推单溜驼峰作业方案如下图:
18
Ⅲ.双推双溜驼峰作业方案 到达场和编组场纵向划分为两个作业区,每区配备
5
四、调车作业的分类
1.按调车目的分为: (1)解体调车 (2)编组调车 (3)摘挂机车 (4)取送调车 (5)其他调车;
6
2.按调车作业范围分: (1)站内调车 (2)越出站界调车 3.按调车所用设备分: (1)牵出线调车 (2)驼峰调车
7
第二节 车站调车区的划分
一、车场调车区划分
1.可将设有牵出线、作业相对独立的车场划分为一个调 车区,例如货场调车区。
一、基本概念
车流组号是指在列车编组计划中,对指定列车编成站 规定的,其出发重车流的一个到达站及其中转范围。
二、线路使用
1.调车场线路专门化(使每条线路都分配有固定用途) 2.调车场线路的活用条件:a.某一车流线路的固定集结 线路满线;b.为方便峰尾编组作业。
9
第四节 调车作业的组织领导及指挥
车站调车工作领导指挥系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
驼峰调车控制
摘要:驼峰调车控制系统(hump marshalling control system)为在驼峰调车场上控制货车溜放进路和溜放速度,实现车列自动分类解体和编组进行自动控制的系统。
它主要包括调车场头部溜放调车控制和峰尾调车进路控制两部分。
头部溜放调车控制又分为驼峰指挥系统(驼峰信号及其他调车信号联锁设备)、机车推峰速度控制、货车溜放进路控制以及货车溜放速度控制。
峰尾的集中联锁及平面溜放控制目前尚未纳入整个驼峰调车自动化系统中。
关键词:驼峰调车控制系统发展简况驼峰指挥系统
机车推峰速度自动控制系统货车溜放进路控制系统
在驼峰调车场上,为控制货车溜放进路和溜放速度,实现列车的自动分类解体和编组所进行的自动控制。
其主要目的是保证驼峰调车作业安全,提高作业能力,减轻作业人员的劳动强度和加强铁路管理质量。
发展简况随着驼峰的出现和发展,驼峰调车控制技术也日益完善。
自1873年英国在利物浦建成世界上第一个驼峰调车场之后,美国于1891年开始把转辙机用于操纵驼峰调车场的道岔,以加快道岔转换。
美国1924年在吉布森站开始应用车辆减速器控制货车的溜放速度;1948年在帕蒂北站采用半自动控制机控制车组溜放速度,并用驼峰电气集中控制溜放进路;1952年在凯赖列特建成用模拟计算机自动控制车组溜放速度的驼峰信号系统;1956年在盖脱威建成用数字计算机控制推峰机车速度和车组溜放速度的列车编组解体自动控制系统。
与此同时各国也相继发展驼峰调
车控制技术和设备,使驼峰调车作业效益不断提高,作业安全也得到了进一步保证,铁路管理质量也日益提高。
中国于1943年在苏家屯开始建成机械化驼峰,用车辆减速器控制溜放速度。
中华人民共和国成立以后,在全国主要编组站相继建成一些机械化驼峰。
80年代初在丰台西站开始应用速控机自动控制编组场减速器,艮山门开始使用减速顶调速控制系统。
1985年南翔编组站开始使用电子计算机控制驼峰调车。
分类驼峰调车控制按控制方法可分为非机械化驼峰调车控制、机械化驼峰调车控制、半自动化驼峰调车控制、自动化驼峰调车控制。
非机械化驼峰调车控制,只能由人工完成机车推峰速度控制和货车溜放进路控制。
机械化驼峰调车控制是在非机械化驼峰调车控制的基础上增设了人工控制的车辆减速器,以控制货车溜放速度。
半自动化驼峰调车控制是用半自动控制机控制车辆减速器,用铁鞋调整溜放速度,并由驼峰电气集中按程序控制溜放进路。
自动化驼峰调车控制是利用计算机程序控制推峰速度、溜放进路及溜放速度。
目前各国大都选用小型数字计算机,以热备和冷备方式构成双机控制系统。
这种系统与编组站数据处理系统连通,就能从数据处理系统取得车列的解体计划和组成信息,并将解体结果输回数据处理计算机系统加强铁路管理。
控制方法驼峰调车控制应用于机车推峰速度控制、货车溜放进路控制、货车溜放速度控制三个方面。
机车推峰速度控制根据车组长短,前、后车组溜放阻力的大小,以及分路地点间隔和预定停车地点的远近等,就可以利用地面驼峰信号或车内信号,指示推峰机车推送车列的速度或从峰
顶后退。
推峰机车也可在峰顶使用无线电遥控。
货车溜放进路控制利用快动型动力转辙机控制分路道岔,使车组由峰顶溜向指定的编组线。
第二次世界大战后,各国开始装设溜放进路程序控制设备,它包括进路命令的存储器和进路命令传达电路、快动转辙机和快动转辙机控制电路,以及驼峰专用的高分流灵敏度速动型轨道电路。
近年来,由于微型计算机的迅速发展,一些国家已采用微型计算机控制溜放进路。
货车溜放速度控制用车辆溜放调速设备来调整车组的溜放速度,使前后相邻车组间有规定间隔,并在溜入编组线后同已有车组安全连挂。
货车溜放速度控制有人工控制和自动控制两种方式。
机械化驼峰一般采用人工控制,即在峰顶到编组线入口的道岔区上装设一个或两个制动位,操作人员在制动位近旁的信号楼内操纵制动位上的车辆减速器,调整车组的溜放速度。
半自动化及自动化驼峰采用自动控制,即根路坡度和弯度、编组线空闲长度等,计算出车组在进路上应具有的溜放速度。
当测出车组速度与计算速度不符时,由车辆调速设备调整。
车组经过调速设备的出口速度的计算公式为:
□式中□为计算的调速设备出口速度;□□为车组到达目标地点的速度;□□为考虑到车轮转动惯量影响的重力加速度;□为车组溜行距离或调速设备控制距离;□为□内的坡度;□为车组溜行阻力。
由于车组的溜行阻力受车辆结构、装载量、线路参数、自然环境等多种因素的影响,因此自动控制货车溜放速度的难度较大,往往需要在峰顶和编组线内分别测速,并在测速设备失效时按测量结果调速。
车组在道岔区溜放时,一般利用安装在道岔区内的车辆减速
器对车组进行间隔制动控制,以保持前后车组有合适的间隔,保证道岔能正确地转换。
车组进入编组线后,自动调速控制方式主要有三种。
①点式(打靶式):在编组线上设置几个制动位,装设车辆减速器、雷达测速仪、线路空闲长度测定器、车辆溜放阻力测定装置等设备,将测定的各种参数输入计算机,计算出车组在各制动位应有的出口速度,经车辆减速器调整车组溜行速度,使之达到计算的出口速度后,安全溜放到连挂点。
②连续式:在编组线上装设对溜行车组进行连续调速的设备,使之按要求速度溜放到挂钩点。
如绳索牵引绞盘推送小车和直线电机加减速小车,就是连续式自动调速设备。
推送小车在车组按允许连挂速度进入小车控制区后,采用推送小车推送,使车组保持允许连挂速度运行到停车点或与已有车组连挂。
加减速小车在编组线入口处捕捉住溜放车组后,先使车组加速运行,在到达停车点前的适当距离时,再减速运行并脱开,使车组安全溜放至停车点或与其他车组连挂。
此外,英国、澳大利亚、中国还采用在编组线全线上密集地装设减速顶,对溜放车组进行调速的方式。
③点连式:是点式和连续式的结合形式,即在编组线之前采用点式控制,后部采用连续式控制。
中国已在哈尔滨进行二调试验据溜放车组同已有车组的允许连挂速度,以及车组的溜行阻力、溜行进路的线。