汽车起重机伸缩臂系统综述
汽车起重机吊臂伸缩同步系统
摘要本文对汽车起重机吊臂伸缩同步系统进行了具体的论证与分析,通过对吊臂伸缩同步系统现阶段的具体情况分析,提出起重机吊臂伸缩同步系统的研究重点是节能动力驱动系统。
针对现阶段液压系统的分析,确定采用负载传感型的液压系统。
在起重机吊臂伸缩同步系统的工作循环中,采用用变频器驱动普通三相异步电机,电机带动定量泵,通过调节电机的转速来改变泵输出的流量,实现到功率适应,从而基本达到节能目的。
起重机吊臂伸缩同步系统中采用变频器的方法成本低,维护简单,而且可以使电机完全停转,最大程度地减少了电机的空载损耗。
为满足工作压力和流量的跟踪测试,用电液比例节流阀进行调节。
系统中电液比例节流阀两端各设一个压力传感器以检测油路的工作压力。
本文还对对动力系统进行了性能的分析。
关键词:吊臂伸缩同步系统;节能;液压系统;负载传感AbstractThe Auto crane jib telescopic synchronization system for a specific proof and analysis,through to the Auto crane jib telescopic synchronization system,put forward the research focused on the Auto crane jib telescopic synchronization system.In view of the present stage hydraulic system analysis,to determine the load sensing hydraulic system.In the Auto crane jib telescopic synchronization system working cycle,the inverter driving a three-phase asynchronous motor,motor driven pump,by regulating the motor speed to change the pump output flow rate,to achieve power adaptation,thus basically achieve the purpose of saving energy.Injection molding machine hydraulic system with frequency converter the method has low cost,simple maintenance,but also can make the machine stop entirely,to maximize the reduction of the motor no-load loss.In order to meet the injection pressure and flow tracking test,by using the electro-hydraulic proportional throttle valve to regulate.System of electro hydraulic proportional throttle valve are arranged on each end of a pressure sensor for detecting oil working pressure.By the end of the pressure loss,power loss and the temperature rise of the hydraulic calculation of the checking system,and the dynamic system performance analysis.Key word:Auto crane jib telescopic synchronization system;Energy saving;Hydraulic system;Load sensing目录第一章绪论 (1)1.1研究的目的和意义 (1)1.2国内外汽车起重机发展趋势和概况 (2)1.2.1国内发展趋势和概况 (2)1.2.2国外发展趋势和概况 (3)1.3伸缩臂结构发展现状 (3)1.4汽车起重机的主要技术参数及工作级别 (6)1.4.1汽车起重机的主要技术参数 (6)1.4.2汽车起重机的工作级别 (8)本章小结 (10)第二章汽车起重机吊臂伸缩同步系统的总体设计方案 (11)2.1伸缩臂机械传动方案的确定及结构的设计 (11)2.1.1伸缩臂传动方案的确定 (11)2.1.2伸缩臂机械结构的设计计算 (12)2.2.汽车起重机吊臂伸缩机构的液压方案的设计 (16)2.2.1确定液压系统回路 (16)2.2.2液压缸的主要性能参数和尺寸的确定 (17)2.3汽车起重机吊臂伸缩机构的电气方案的设计 (19)第三章汽车起重机吊臂伸缩同步系统主要技术指标计算 (21)3.1吊臂伸缩同步系统的静态设计 (21)3.1.1伺服阀的参数选择 (21)3.1.2动力元件的参数选择 (23)3.1.3传感器的选择 (27)3.2吊臂伸缩同步系统的动态设计 (29)3.2.1各组成元件的动态特性 (29)3.2.2系统的稳定性分析 (31)3.2.3系统的响应特性 (32)第四章汽车起重机吊臂伸缩同步系统其它元件计算选择 (35)4.1供油压力的选择 (35)4.2液压执行元件的选择 (35)4.2.1液压缸的选择 (35)4.3其他元件的选择 (37)4.3.1液压泵的选择 (37)4.3.2冷却器的选择 (40)第五章汽车起重机吊臂伸缩同步系统的泵站校核计算 (42)5.1液压系统压力损失计算 (42)5.2液压系统的功率计算 (42)5.2.1计算液压系统的发热功率 (42)5.2.2计算液压系统的散热功率 (43)5.3计算液压系统冲击压力 (44)5.3.1计算液压系统冲击压力 (44)5.4系统发热功率的计算 (46)5.4.1系统发热量计算 (46)5.4.2散热量计算 (46)第六章总结 (48)致谢 (49)参考文献 (50)第一章绪论1.1研究的目的和意义汽车起重机作为工程建设广泛使用的重要起重设备,主要用来对物料进行运输、起重、输送等作业,它移动方便,操作灵活,对减轻劳动强度、加快建设速度、提高施工质量起着十分重要的作用。
汽车起重机吊臂伸缩原理

汽车起重机吊臂伸缩原理你有没有好奇过汽车起重机那长长的吊臂是怎么伸缩自如的呀?今天呀,咱就来好好唠唠这个超有趣的事儿。
咱先来说说汽车起重机吊臂的基本构造。
你看啊,吊臂就像是一个超级神奇的变形金刚手臂。
它可不是简单的一根大铁杆子哦。
它是由好几节组成的,就像那种可以一节一节拉长的望远镜似的。
每一节呢,都有它自己的小秘密。
最里面的那一节是基础,就像大树的树干一样,稳稳地待在那儿。
其他的节就像树枝一样,可以沿着这树干伸出去或者缩回来。
这每一节的连接呀,可都是很有讲究的呢。
那它到底是怎么伸缩的呢?这里面就涉及到一个超酷的机械原理啦。
在吊臂里面呢,有一些叫做伸缩油缸的东西。
这个伸缩油缸呀,就像是一个大力士的肌肉一样。
当要把吊臂伸出去的时候,这个伸缩油缸就开始工作啦。
它会像打气筒一样,把里面的油给推出去,然后通过一些巧妙的装置,把力量传递到下一节吊臂上。
这个力量就会让下一节吊臂慢慢地沿着上一节吊臂的轨道滑出去。
你可以想象成是火车沿着铁轨缓缓前行的样子,只不过这个是在吊臂里面,而且是一节推动一节往外走。
而且哦,为了让这个伸缩的过程特别平稳,不会突然就冲出去或者卡住,还有好多小零件在帮忙呢。
比如说有一些滑块呀,它们就像是小小的保镖一样,在每一节吊臂的连接处,保证它们滑动得顺顺当当的。
如果没有这些滑块,那吊臂伸缩的时候可能就会像个调皮捣蛋的孩子,东倒西歪的,那可就危险啦。
再说说把吊臂缩回来的时候吧。
这时候伸缩油缸就像是一个温柔的大力士啦。
它会把外面那节吊臂慢慢地拉回来。
这个过程也不是简单粗暴的哦,也是要通过那些巧妙的装置,一点一点地把吊臂给拉回来。
就好像是把伸出去的手慢慢地收回来一样,得小心翼翼的。
你可能会想,这吊臂伸缩就这么简单呀?其实呀,这里面还有很多复杂的安全装置呢。
比如说,要是在吊臂伸出去或者缩回来的过程中,突然遇到了很大的阻力,就像有个大石头挡住了一样,这时候就有一些感应装置会察觉到。
然后呢,它就会告诉整个起重机的控制系统,控制系统就会让伸缩油缸停下来,防止把吊臂或者其他零件给弄坏了。
汽车起重机伸缩臂结构有限元分析及优化

汽车起重机伸缩臂结构有限元分析及优化汽车起重机伸缩臂结构有限元分析及优化引言:汽车起重机作为一种重要的工程机械设备,在建筑、物流等行业中起着重要的作用。
而在汽车起重机的设计中,伸缩臂结构是其关键组成部分之一。
伸缩臂结构的合理设计和优化可以提高汽车起重机的工作效率和承载能力,降低其重量和成本。
因此,对汽车起重机伸缩臂结构进行有限元分析与优化具有重要的理论意义和实际应用价值。
1. 伸缩臂结构的设计和工作原理汽车起重机的伸缩臂结构由伸缩臂筒、伸缩臂滑块、伸缩臂大臂、伸缩臂小臂等组成。
其工作原理是通过液压系统控制伸缩臂筒的伸缩,从而实现伸缩臂的变化和起重高度的调节。
伸缩臂结构的设计直接影响汽车起重机的工作性能和稳定性。
2. 有限元分析的原理和方法有限元分析是一种数值分析方法,通过将结构离散化为有限个小元素,利用数学和力学原理对每个小元素进行计算,最后得到整个结构的应力、应变、位移等相关信息。
有限元分析方法可以精确计算伸缩臂结构在不同工况下的受力情况,为优化设计提供基础。
3. 初始结构的有限元分析首先,采用有限元分析方法对汽车起重机初始伸缩臂结构进行分析。
通过初始结构的有限元模型建立和边界条件的设定,计算得到伸缩臂结构在不同工况下的受力情况,包括应力、应变、变形等参数。
利用有限元分析结果,可以评估初始结构的工作性能,并确定需要改进的方向。
4. 结构优化设计与分析基于初始结构的有限元分析结果,可以进行伸缩臂结构的优化设计。
结构优化的目标是提高结构的工作效率和承载能力,降低结构的重量和成本。
通过在有限元模型中进行参数化设计和分析,可以获得不同设计方案下的结构性能指标。
综合考虑结构的强度、刚度、轻量化等因素,选择最优设计方案。
5. 优化设计的验证与验证对优化设计方案进行验证与评估是优化过程的重要环节。
通过将优化设计方案转化为实际工艺制造过程中的参数,并制作样件进行实际测试和评估,可以验证优化设计方案的有效性,并进一步优化设计方案。
汽车起重机伸缩臂系统综述

论文论文题目:汽车起重机伸缩臂系统综述姓名学号学院班级专业汽车起重机伸缩臂系统综述摘要:随着经济建设的迅速发展,我国的基础建设力度正逐渐加大,道路交通,机场,港口,水利水电,市政建设等基础设施的建设规模也越来越大,市场汽车起重机的需求也随之增加。
汽车起重机为安装在标准式或特制汽车底盘上的起重设备。
而臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
针对徐工50t汽车起重机伸缩机构的分析和研究,从而改进汽车起重机的整机性能,降低成本,同时提高了起重机的作业能力及使用经济性。
目前伸缩臂机构有两种形式,绳排系统和单缸插销式。
绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。
此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。
关键词:伸缩臂;液压缸;臂架结构Abstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Keywords:Telescopic boom; hydraulic cylinder; Structure of boom .1.1QY40全液压起重机主要技术参数整机主要性能参数最大起重量*幅度 40t*3m最大起升高度 46 m滑轮组倍率 11主臂长 11-33.5m(4节)主臂全程伸缩时间 162Sec主臂变幅范围 -2-80degree主臂变幅时间 60Sec主卷扬单绳速度 0-110 m/min副卷扬单绳速度 >40 m/minM最大起升力矩 1401 kN.m最大回转速度 0-2.0 r/min最高行驶速度 68 km/h最大爬坡度 37%最小转弯半径 12m行驶状态总重 37.51t外形尺寸13.65×2.75×3.46m支腿距离(纵向×横向) 5.45×6.2m上车空冷发动机斯太尔WD615.61最大功率 191KW(2600rpm)最大扭矩 828Nm(1600rpm)1.2起重机的技术参数表征起重机的作业能力,汽车式起重机的主要技术参数包括起重量、起升高度、幅度、起重力矩等。
25吨位起重机伸缩机构液压系统设计解析
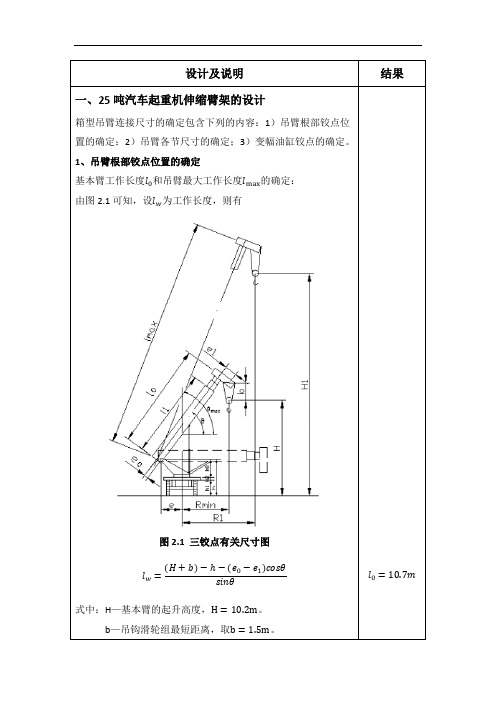
一、25吨汽车起重机伸缩臂架的设计箱型吊臂连接尺寸的确定包含下列的内容:1)吊臂根部铰点位置的确定;2)吊臂各节尺寸的确定;3)变幅油缸铰点的确定。
1、吊臂根部铰点位置的确定基本臂工作长度l0和吊臂最大工作长度l max的确定:由图2.1可知,设l w为工作长度,则有图2.1 三铰点有关尺寸图l w=(H+b)−ℎ−(e0−e1)cosθsinθ式中:H—基本臂的起升高度,H=10.2m。
b—吊钩滑轮组最短距离,取b=1.5m。
外露空间a大一些,得出l i′′=l i+1′′+(c−a)。
此次设计共有4节臂,其最后一节的搭接长度为l5′′使其等于1/5的外伸长度,现在l max和l0已经得出,则吊臂的各节搭接长度和结构长度分别为,l4′′=0.2l l40=1.2ll3′′=0.2l+(c−a)l30=1.2l+(c−a)l2′′=0.2l+2(c−a)l20=1.2l+2(c−a)l10=1.2l+3(c−a)各节臂长度尺寸的验算计算的基本臂工作长度l0必须满足下面的式子,所计算的各节臂的长度值才能满足需要,l0=l10+a(k−1)≥1.2l+(k−1)c不等式左边为10.95m,右边为10.95m,长度满足要求。
最终求得l0=10.95m,l max=34.95m。
以上所用尺寸如下图所示图2.2 结构尺寸图3、变幅液压缸铰点的确定变幅液压缸的铰点如图3.1所示。
变幅液压缸根部铰点(O1)的位置,一般使其落在回转支撑装置的滚道上,从而改变了平台的受力情况。
采用双作用液压缸,其铰点离回转中心的距离f取决于双缸间的距离B,可通过下式算得:图3.1 主臂铰点位置图f=√(D2)2−(B2)2D—起重机底盘直径,D=2m。
B—吊臂宽度,由于回转支撑装置D和吊臂宽度B都与起重能力有关,一般取D=(2.1~2.4)B,这里取D=2.3B。
铰点O在求得ℎ0和e时已经确定即ℎ0=0.84m,e=2.35m,所以认定铰点O已经确定。
汽车吊大臂伸缩的原理

汽车吊大臂伸缩的原理
汽车吊大臂伸缩的原理是通过液压系统来实现的。
液压系统由一个液压泵、液压缸和控制阀组成。
当需要将大臂伸长时,液压泵将液压油从油箱吸入,通过高压泵将液压油压力增加后送入液压缸的一个腔体。
同时,另一个腔体的液压油经过控制阀排出,使液压缸的另一侧形成负压,从而使液压缸得到推动,使大臂伸长。
当需要将大臂缩短时,控制阀切换使液压泵将液压油从油箱吸入液压缸的另一个腔体,同时将另一个腔体的液压油通过控制阀排出,形成负压,使液压缸收缩,从而使大臂缩短。
通过控制阀的切换和液压泵的工作,可以实现大臂的伸缩控制。
液压系统具有结构简单、可靠性高、承载能力大等优点,因此被广泛应用于汽车吊大臂的伸缩装置中。
汽车起重机伸缩臂系统设计开题报告 (135)

开题报告题目汽车起重机伸缩臂系统设计1.课题来源近年来,随着社会的发展,社会生活中对起重机的需求越来越大,所以起重机的研发越来越紧迫,由于汽车式起重机转场灵活,从而方便快捷,所以进几年我国的汽车式起重机发展很快。
但是,与国外汽车式起重机相比,国外汽车式起重机技术得到了飞速发展,为了降低整机成本,提高性能,整机质量越来越小,在起重性能相同的情况下,自重约比十年前降低了20%左右,由于车辆自重的减小,使车辆采用尽可能少的轴数(尤其是大吨位起重机),这样,大大简化了车辆的结构,成本降低,同时提高了起重机的作业能力及使用经济性,所以,同等吨位的销售价较前十年有大幅下降,对中国国内市场造成了很大冲击,因此,对我国的汽车式起重机的生产者来说是一个严峻的考验。
臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
2. 研究目的和意义臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
3.国内外现状及发展趋势中国的汽车式起重机诞生于上世纪的10年代,经过了近30年的发展,期间有过3次主要的技术改进,分别为70年代引进苏联的技术,80年代引进日本的技术,90年代引进德国的技术。
但是总体来说,中国的汽车式起重机产业始终走着自主创新的道路,有着自己清晰的发展脉络,尤其是进几年,中国的汽车式起重机产业取得了长足的发展,虽然与国外相比还有一定的差距,但是这个差距正在逐渐的缩小。
起重机伸缩臂伸缩原理

起重机伸缩臂伸缩原理
起重机伸缩臂是一种常见的起重设备,它能够通过伸缩来适应不
同高度的工作需求。
其中,起重机伸缩臂的伸缩原理是其能够顺利运
转的基础。
首先,起重机伸缩臂伸缩原理是通过采用液压系统实现的。
液压
系统采用液体传递压力来实现机械运动,因此起重机伸缩臂伸缩也是
通过液压系统来实现的。
其次,起重机伸缩臂的伸缩原理是通过液压缸来实现的。
液压缸
是液压系统中的重要组成部分,它可以将液体的压力转换成机械力,
从而实现伸缩臂的伸缩。
具体来说,当液压系统向液压缸中充入液体时,液压缸的活塞就
会被推动向伸缩臂的一端。
这样一来,伸缩臂就会向外伸展,从而实
现伸缩臂的伸长。
反之,当液压系统将液体从液压缸中排放时,液压
缸的活塞则会被拉回到起始位置,伸缩臂也会缩回到原来的长度。
此外,起重机伸缩臂伸缩原理还需要考虑到液压系统中的控制阀。
控制阀可以对液压系统中的液体流量进行控制,从而实现对起重机伸
缩臂伸缩速度和长度的控制。
因此,控制阀的调节是起重机伸缩臂能
否顺利运转的关键。
总之,起重机伸缩臂伸缩原理是通过采用液压系统和液压缸来实
现的。
液压缸的活塞可以将液压系统中的液体压力转换为机械力,从
而实现起重机伸缩臂的伸缩。
此外,起重机伸缩臂的运行速度和长度还受到控制阀的调节控制。
掌握这些原理,就可以更好地维护和操作起重机伸缩臂设备了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论文论文题目:汽车起重机伸缩臂系统综述姓名学号学院班级专业汽车起重机伸缩臂系统综述摘要:随着经济建设的迅速发展,我国的基础建设力度正逐渐加大,道路交通,机场,港口,水利水电,市政建设等基础设施的建设规模也越来越大,市场汽车起重机的需求也随之增加。
汽车起重机为安装在标准式或特制汽车底盘上的起重设备。
而臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
针对徐工50t汽车起重机伸缩机构的分析和研究,从而改进汽车起重机的整机性能,降低成本,同时提高了起重机的作业能力及使用经济性。
目前伸缩臂机构有两种形式,绳排系统和单缸插销式。
绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。
此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。
关键词:伸缩臂;液压缸;臂架结构Abstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Keywords:Telescopic boom; hydraulic cylinder; Structure of boom .1.1QY40全液压起重机主要技术参数整机主要性能参数最大起重量*幅度 40t*3m最大起升高度 46 m滑轮组倍率 11主臂长 11-33.5m(4节)主臂全程伸缩时间 162Sec主臂变幅范围 -2-80degree主臂变幅时间 60Sec主卷扬单绳速度 0-110 m/min副卷扬单绳速度 >40 m/minM最大起升力矩 1401 kN.m最大回转速度 0-2.0 r/min最高行驶速度 68 km/h最大爬坡度 37%最小转弯半径 12m行驶状态总重 37.51t外形尺寸13.65×2.75×3.46m支腿距离(纵向×横向) 5.45×6.2m上车空冷发动机斯太尔WD615.61最大功率 191KW(2600rpm)最大扭矩 828Nm(1600rpm)1.2起重机的技术参数表征起重机的作业能力,汽车式起重机的主要技术参数包括起重量、起升高度、幅度、起重力矩等。
这些参数表名起重机工作性能和技术经济指标,它是设计起重机的技术依据,也是生产使用中选择起重机技术性能的依据。
(1)起重量起重机起吊重物的质量称为起重量,通常以Q表示,单位为kg或t。
起重机的起重参数通常是以额定起重量表示的。
所谓额定起重量是指起重机在各种工况下安全作业所容许的起吊重物的最大质量的值,它是随着幅度的加大而减小的。
带有吊钩的起重机的额定起重量不包括吊钩和滑轮组的自重。
汽车式起重机的额定起重量随着吊臂的方位(侧方、后方、前方三个基本作业方位)不同而有所变化。
汽车式起重机的额定起重量还分支腿全伸、不用支腿吊臂行驶3种情况。
起重机吊重行使时,起重臂必须前置。
起重机不用支腿作业和吊重行使时的额定起重量决定于轮胎、车桥(或轮对转向架)的承载能力。
(2)起升高度起升高度是指从地面或轨道顶面至取物装置最高起生位置的铅垂距离(吊钩取取钩环中心),单位为米。
如果取物装置能下落到地面或轨面以下,从地面或轨面至取物装置最低下放位置间的铅垂距离称为下放深度。
此时总起升高度H为轨面以上的起升高度h2和轨面以下的下放深度h3之和,H=h2+h3。
由于汽车式起重机的起升高度随着臂架仰角和臂架长度变化,在各种臂长和不同臂架仰角时可得相应的起升高度曲线。
汽车式起重机起升高度的选择按作业要求而定。
在确定起升高度时,应考虑配属的吊具、路基和汽车高度保证起重机能将最大高度的物品装入车内。
汽车式起重机的最大起升高度的确定是根据起重机作业要求和起重机总体设计的合理性综合考虑。
(3)幅度旋转臂架式起重机处于水平位置时,回转中心线与取物装置中心线垂直之间的水平距离称为幅度(R)。
幅度的最小值Rmax和最大值Rmin根据作业要求而定。
在臂架变幅平面内起重机机体的最外边至取物中心铅垂线之间的距离称为有效幅度,有效幅度可为正值或副值。
汽车式起重机有效幅度通常是指使用支腿工作,臂架位于侧向最小幅度时,取物装置中心铅垂线至该侧两支腿中心连线的水平距离,它表示汽车式起重机在最小幅度时工作的可能性。
汽车式起重机的幅度R。
(4)起重力矩起重力矩是臂架类起重机主要技术数据之一,它等于额定起重量Q和其相对应的工作幅度R的乘积,即M=Q×R,起重力矩一般用t·m为单位。
伸缩回路伸缩回路如图3.4所示:图3.4伸缩回路此伸缩回路采用电磁液动阀组来控制各臂的伸缩,除了不能同步伸缩外,其他的伸缩方式都可以。
3.3.1性能要求起、制动平稳,各缸应具有一定的伸缩选择性能;3.3.2主要元件单向定量泵(4与变幅、支腿回路共用)、电液比例换向阀(24)、二位六通转阀(23)、缸(25、26、27)、电磁-液控组阀(30、31)、平衡阀(29)、单向阀组(28)3.3.3主要回路缸25、26、27伸出、缩回油路,控制油路3.3.4功能实现和工作原理(1) 缸25伸出A)控制回路35-1(常) 35-4(下位)(向伸缩臂油路通油)37-2(右移)电流 24(右)油油箱(24左移)23右转(切换成伸缩状态)B)主油路4 35-4(下位) 24(右) 23(左)B 25 30-1(上)29-1(开) 25(无杆腔)(缸25伸出)25(无杆腔)A 23(左) 24(右)油箱(回油)(2)缸25缩回A)控制回路35-1(常) 35-4(下位)(向伸缩臂油路通油)37-1(左移)电流 24(左)油油箱(24右移)23右转(切换成伸缩状态)B)主油路4 35-4(下位) 24(左) 23(左)A 25(有杆腔)(缩回)25(无) 29-1(开) 30-1(上) 25 B 23(左) 24(左) 油箱(回油)(3)缸26伸出A)控制回路35-1(常) 35-4(下位)(向伸缩臂油路通油)37-2(右移电流 24(右)油油箱(24左移)23右转(切换成伸缩状态)DF5(+) 30-2(上位) 30-1(下位)(连通缸26油路)B)主油路4 35-4(下位) 24(右) 23(左)B 25 30-1(下) B′31-1(上)29-2(开) 26 (无杆腔)(缸26伸出)26(有杆腔) 25(有杆腔) B 23(左) 24(右) 油箱 (回油)(4)缸26缩回A)控制回路37-1(左移)电流 24(左)油油箱(24右移)其它的跟伸出相同B)主油路4 35-4(下) 24(左) 23(左)A 25(有杆腔)A′ 2 6(有杆腔) (26缩回) 26(无杆腔) 29-2(开) 31-1(上) 26 B′ 30-1(下) 25 B 23(左)24(左)油箱(回油)(5)缸27伸出A)控制油路DF6(+) 31-1(下位)其它的跟缸26伸出控制一样B)主油路跟缸26伸出相似(6)缸27缩回2.2伸缩臂架的截面形式分类伸缩臂是受弯为主的双向压弯构件,除受有整体强度、刚度、稳定性的约束限制外,主要受局部稳定性约束。
因此采用何种截面形式使吊臂的自重较小、材料的利用充分,是伸缩式吊臂设计的关键技术。
以下是目前伸缩式吊臂常见的截面形式(如图2.2所示):伸缩臂可以制成几种典型箱形截面:矩形、梯形、倒置梯形、五边形、六边形、八边形、大圆角矩形以及椭圆形截面等。
其中,矩形截面是由翼缘板和腹板焊接而成的,它是目前轮式起重机伸缩臂中用得最多的截面形式。
与其他截面形式相比,矩形截面的制造工艺简单,具有较好的抗弯能力和抗扭刚度,因此,中、小吨位轮式起重机的伸缩臂通常都采用这一形式,但是这种截面没有充分发挥材料的承载能力,为了使伸缩臂各节之间能很好地传递扭矩和横向力,需设附加支承。
梯形截面的上翼缘板窄,下翼缘板宽,截面中性层靠下能发挥上翼缘板的机械性能,提高腹板的稳定性,前部滑块可接近腹板布置,后部滑块传递给上翼缘板的集中力,因上翼缘板窄,产生的弯曲力矩减小。
梯形截面的扭转刚度和横向刚度均较矩形截面大,但是,这种截面的下翼缘板宽,对局部稳定不利,材料性能得不到充分发挥,且需设侧向支承装置,这是梯形截面的缺点。
倒置梯形的下翼缘板窄,上翼缘板宽,对提高下翼缘板的局部稳定性很有好处,材料能得到充分利用,且和梯形截面一样,具有较大的横向刚度和扭转刚度,倒置梯形伸缩臂对安装变幅油缸较为有利,但是这种截面对上翼缘板的局部弯曲和腹板的稳定性不是很有利,亦需设侧向支承。
梯形和倒置梯形截面的伸缩臂通常用于大吨位的轮式起重机。
八边形和大圆角矩形截面的下翼缘板和腹板的实际计算宽度较小,有利于提高抗失稳的能力。
前后滑块均支承在四角处,伸缩臂各板不产生局部弯曲,且能较好地传递扭矩与横向力,因此这两种截面形式的伸缩臂能较好的发挥材料机械性能,减轻结构自重。
对大吨位轮式起重机采用这种截面形式是合适的。
制造这两种截面形式的吊臂,需要大型轧床,但是随着工业的发展,这两种形式的吊臂应用会逐渐增多。
LIEB班RR的LTM1300起重臂的截面采用了椭圆形截面,其截面上弯板为大圆弧槽形板,下弯板为椭圆形槽形板,且由下向上收缩,其重量优化,抗扭性能显著,具有固有的独特稳定性和抗屈曲能力。