差动变面积式电容传感器的静态特性
传感器技术第3版课后部分习题解答

光勇 0909111621 物联网1102班《传感器技术》作业第一章习题一1-1衡量传感器静态特性的主要指标。
说明含义。
1、线性度——表征传感器输出-输入校准曲线与所选定的拟合直线之间的吻合(或偏离)程度的指标。
2、回差(滞后)—反应传感器在正(输入量增大)反(输入量减小)行程过程中输出-输入曲线的不重合程度。
3、重复性——衡量传感器在同一工作条件下,输入量按同一方向作全量程连续多次变动时,所得特性曲线间一致程度。
各条特性曲线越靠近,重复性越好。
4、灵敏度——传感器输出量增量与被测输入量增量之比。
5、分辨力——传感器在规定测量围所能检测出的被测输入量的最小变化量。
6、阀值——使传感器输出端产生可测变化量的最小被测输入量值,即零位附近的分辨力。
7、稳定性——即传感器在相当长时间仍保持其性能的能力。
8、漂移——在一定时间间隔,传感器输出量存在着与被测输入量无关的、不需要的变化。
9、静态误差(精度)——传感器在满量程任一点输出值相对理论值的可能偏离(逼近)程度。
1-2计算传感器线性度的方法,差别。
1、理论直线法:以传感器的理论特性线作为拟合直线,与实际测试值无关。
2、端点直线法:以传感器校准曲线两端点间的连线作为拟合直线。
3、“最佳直线”法:以“最佳直线”作为拟合直线,该直线能保证传感器正反行程校准曲线对它的正负偏差相等并且最小。
这种方法的拟合精度最高。
4、最小二乘法:按最小二乘原理求取拟合直线,该直线能保证传感器校准数据的残差平方和最小。
1—4 传感器有哪些组成部分?在检测过程中各起什么作用?答:传感器通常由敏感元件、传感元件及测量转换电路三部分组成。
各部分在检测过程中所起作用是:敏感元件是在传感器中直接感受被测量,并输出与被测量成一定联系的另一物理量的元件,如电阻式传感器中的弹性敏感元件可将力转换为位移。
传感元件是能将敏感元件的输出量转换为适于传输和测量的电参量的元件,如应变片可将应变转换为电阻量。
电容式传感器原理解析及其应用举例
工业技术科技创新导报 Science and Technology Innovation Herald48电容式传感器是一种利用电容变化把非电物理量转换成电信号的装置。
它的应用十分广泛,比如:可以用于运动学物理量的测量,也可以用于液面、物质成分、湿度等方面的测量。
它的优点是结构简单,价格便宜,灵敏度高,零磁滞,动态响应特性好,可实现非接触测量,对高温、辐射、强振等恶劣条件的适应性强等。
缺点是输出有非线性,寄生电容和分布电容对灵敏度和测量精度的影响较大,联接电路比较复杂等。
随着技术的发展,电容式传感器正在逐渐扬长避短[1]。
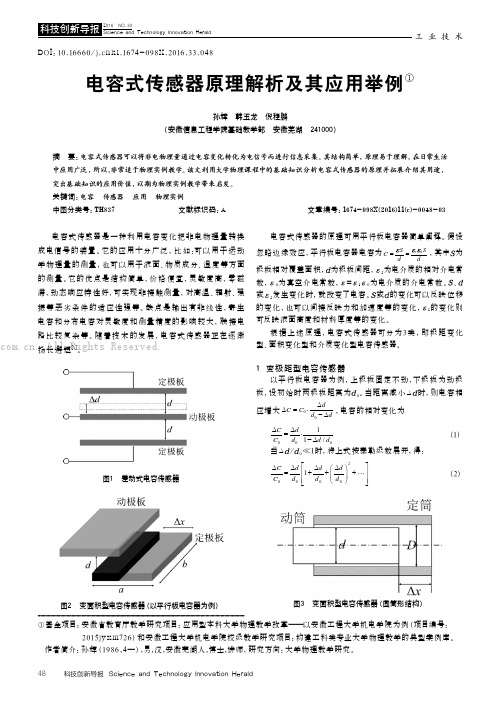
电容式传感器的原理可用平行板电容器简单阐释。
假设忽略边缘效应,平行板电容器电容为0r SS C dd==,其中为极板相对覆盖面积,为极板间距,r 为电介质的相对介电常数,0为真空介电常数,=r为电介质的介电常数。
、或r发生变化时,就改变了电容。
或的变化可以反映位移的变化,也可以间接反映力和加速度等的变化,r 的变化则可反映液面高度和材料厚度等的变化。
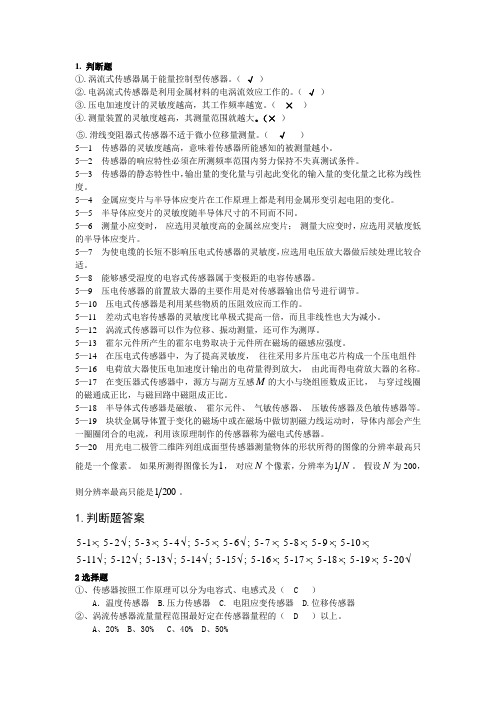
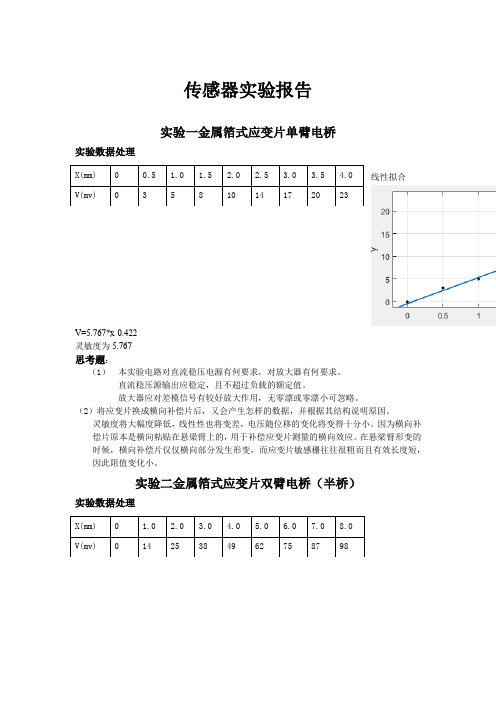
根据上述原理,电容式传感器可分为3类,即极距变化型、面积变化型和介质变化型电容传感器。
1 变极距型电容传感器以平行板电容器为例,上极板固定不动,下极板为动极板,设初始时两极板距离为0。
当距离减小Δ时,则电容相应增大00dC C d d∆∆=⋅-∆,电容的相对变化为00011/C d C d d d ∆∆=⋅-∆ (1)当Δ/<<1时,将上式按泰勒级数展开,得:200001C d d d C d d d ⎡⎛⎫∆∆∆∆⎢=+++ ⎪⎢⎝⎭⎣…⎤⎥⎥⎦(2)①基金项目:安徽省教育厅教学研究项目:应用型本科大学物理教学改革——以安徽工程大学机电学院为例(项目编号:2015jy x m726)和安徽工程大学机电学院校级教学研究项目:构建工科类专业大学物理教学的典型案例库。
作者简介:孙辉(1986,4—),男,汉,安徽芜湖人,博士,讲师,研究方向:大学物理教学研究。
03电容式传感器的位移特性实验

实验八 电容式传感器的位移特性实验一、实验目的:了解电容式传感器结构及其特点。
二、基本原理:利用平板电容C =εS /d 和其它结构的关系式通过相应的结构和测量电路可以选择ε、S 、d 中三个参数中,保持两个参数不变,而只改变其中一个参数,则可以有测谷物干燥度(ε变)测微小位移(变d )和测量液位(变S )等多种电容传感器。
变面积型电容传感器中,平板结构对极距特别敏感,测量精度受到影响,而圆柱形结构受极板径向变化的影响很小,且理论上具有很好的线性关系,(但实际由于边缘效应的影响,会引起极板间的电场分布不均,导致非线性问题仍然存在,且灵敏度下降,但比变极距型好得多。
)成为实际中最常用的结构,其中线位移单组式的电容量C 在忽略边缘效应时为: ()12ln 2r r l C πε= (1) 式中 l ——外圆筒与内圆柱覆盖部分的长度;12r r 、——外圆筒内半径和内圆柱外半径。
当两圆筒相对移动l ∆时,电容变化量C ∆为 ()()()()ll C l l l l C r r r r r r ∆=∆=∆--=∆0121212ln 2ln 2ln 2πεπεπε (2) 于是,可得其静态灵敏度为: ()()()()()121212ln 4/ln 2ln 2r r r r r r g l l l l l l C k πεπεπε=∆⎥⎦⎤⎢⎣⎡∆--∆+=∆∆= (3) 可见灵敏度与,12r r 有关,12r r 与越接近,灵敏度越高,虽然内外极筒原始覆盖长度l 与灵敏度无关,但l 不可太小,否则边缘效应将影响到传感器的线性。
本实验为变面积式电容传感器,采用差动式圆柱形结构,因此可以很好的消除极距变化对测量精度的影响,并且可以减小非线性误差和增加传感器的灵敏度。
三、需用器件与单元:电容传感器、电容传感器实验模板、测微头、数显单元、直流稳压源。
四、实验步骤:1、将电容式传感器装于电容传感器实验模板上,将传感器引线插头插入实验模板的插座中。
哈尔滨石油学院 第三章判断题选择题填空题(总)
1. 判断题①.涡流式传感器属于能量控制型传感器。
( √ )②.电涡流式传感器是利用金属材料的电涡流效应工作的。
( √ )③.压电加速度计的灵敏度越高,其工作频率越宽。
( × )④.测量装置的灵敏度越高,其测量范围就越大。
(× )⑤.滑线变阻器式传感器不适于微小位移量测量。
( √ )5—1 传感器的灵敏度越高,意味着传感器所能感知的被测量越小。
5—2 传感器的响应特性必须在所测频率范围内努力保持不失真测试条件。
5—3 传感器的静态特性中,输出量的变化量与引起此变化的输入量的变化量之比称为线性度。
5—4 金属应变片与半导体应变片在工作原理上都是利用金属形变引起电阻的变化。
5—5 半导体应变片的灵敏度随半导体尺寸的不同而不同。
5—6 测量小应变时, 应选用灵敏度高的金属丝应变片; 测量大应变时,应选用灵敏度低的半导体应变片。
5—7 为使电缆的长短不影响压电式传感器的灵敏度,应选用电压放大器做后续处理比较合适。
5—8 能够感受湿度的电容式传感器属于变极距的电容传感器。
5—9 压电传感器的前置放大器的主要作用是对传感器输出信号进行调节。
5—10 压电式传感器是利用某些物质的压阻效应而工作的。
5—11 差动式电容传感器的灵敏度比单极式提高一倍,而且非线性也大为减小。
5—12 涡流式传感器可以作为位移、振动测量,还可作为测厚。
5—13 霍尔元件所产生的霍尔电势取决于元件所在磁场的磁感应强度。
5—14 在压电式传感器中,为了提高灵敏度, 往往采用多片压电芯片构成一个压电组件 5—16 电荷放大器使压电加速度计输出的电荷量得到放大, 由此而得电荷放大器的名称。
5—17 在变压器式传感器中,源方与副方互感M 的大小与绕组匝数成正比, 与穿过线圈的磁通成正比,与磁回路中磁阻成正比。
5—18 半导体式传感器是磁敏、 霍尔元件、 气敏传感器、 压敏传感器及色敏传感器等。
5—19 块状金属导体置于变化的磁场中或在磁场中做切割磁力线运动时, 导体内部会产生一圈圈闭合的电流,利用该原理制作的传感器称为磁电式传感器。
传感器实验报告
传感器实验报告实验一金属箔式应变片单臂电桥实验数据处理线性拟合V=5.767*x-0.422 灵敏度为5.767思考题:(1) 本实验电路对直流稳压电源有何要求,对放大器有何要求。
直流稳压源输出应稳定,且不超过负载的额定值。
放大器应对差模信号有较好放大作用,无零漂或零漂小可忽略。
(2)将应变片换成横向补偿片后,又会产生怎样的数据,并根据其结构说明原因。
灵敏度将大幅度降低,线性性也将变差,电压随位移的变化将变得十分小。
因为横向补偿片原本是横向粘贴在悬梁臂上的,用于补偿应变片测量的横向效应。
在悬梁臂形变的时候,横向补偿片仅仅横向部分发生形变,而应变片敏感栅往往很粗而且有效长度短,因此阻值变化小。
实验二金属箔式应变片双臂电桥(半桥)实验数据处理V=11.95*x+0.778灵敏度为11.95思考题:(1)根据应变片受力情况变化,对实验结果作出解释。
在梁上下表面受力方向相反的应变片相当于将形变放大两倍,,因此,ΔV/ΔX大约是实验一中的两倍。
(2)将受力方向相反的两片应变片换成同方向应变片后,情况又会怎样。
同方向的两片应变片相互抵消,输出为零。
(3)比较单臂,半桥两种接法的灵敏度。
在相同形变量下,半桥的灵敏度约是单臂的两倍。
实验三金属箔式应变片四臂电桥(全桥)的静态位移性能V=24.15*x+1.4灵敏度问24.15思考题:(1)如果不考虑应变片的受力方向,结果又会怎样。
对臂应变片的受力方向应接成相同,邻臂应变片的受力方向相反,否则相互抵消没有输出(2)比较单臂,半桥,全桥各种接法的灵敏度。
在相同形变量下,半桥灵敏度约是单臂的两倍,全桥灵敏度越是半桥的两倍,即约为全桥的四倍。
实验四金属箔式应变片四臂电桥(全桥)振动时的幅频性能实验数据处理思考题:(1)在实验过程中,观察示波器读出频率与频率表示值是否一致,据此,根据应变片的幅频特性可作何应用。
不一致。
可以根据这个原理反向测出梁的震动频率,利用应变片读出峰值,在找到对应的频率值即可。
传感器填空题1
1测量1.直接测量方法中,又分,和。
(零位法;偏差法;微差法)2.零位法是指与在比较仪器中进行,让仪器指零机构,从而确定被测量等于。
该方法精度。
(被测量;已知标准量;比较;达到平衡(指零);已知标准量;较高)3.偏差法是指测量仪表用相对于,直接指出被测量的大小。
该法测量精度一般不高。
(指针、表盘上刻度线位移)7.微差法是和的组合。
先将被测量与一个进行,不足部分再用测出。
(零位法;偏差法;已知标准量;比较;偏差法)8.测量仪表指示值程度的量称为精密度。
测量仪表指示值有规律地程度的量称为准确度。
(不一致;偏离真值)9.测量仪表的精确度简称,是和的总和,以测量误差的来表示。
(精度;精密度;准确度;相对值)10.显示仪表能够监测到被测量的能力称分辨力。
(最小变化)11.传感器一般由敏感元件、转换元件、转换电路三部分组成。
12.对一台确定的仪表或一个检测系统,最大引用误差是一个定值。
13.测量仪表一般采用最大引用误差不能超过的允许值作为划分精度等级的尺度。
14.某仪表的精度等级为0.1级,是表示在使用时它的最大引用误差不超过±0.1%;即在整个量程内它的绝对误差最大值不会超过其量程的±0.1%。
15.精度等级已知的测量仪表只有在被测量值接近满量程时,才能发挥它的测量精度。
16.静态特性表示传感器在被测量各个值处于稳定状态时的输入输出关系。
静态特性的主要技术指标有:线性度、迟滞特性、重复性、灵敏度、分辨力和阈值、稳定性和温度稳定性、漂移、静态误差等。
17.传感器的动态性能指标主要有:固有频率、阻尼系数、频响范围、频率特性、时间常数、上升时间、响应时间、过冲量、衰减率、稳态误差、临界速度、临界频率等。
18.分辨力(分辨率)指传感器能检测到的最小的输入增量,可用绝对值、也可用满量程的百分数表示。
19.阈值:自控系统中能产生一个校正动作的最小输入值。
20.分辨力说明了传感器的最小的可测出的输入变量;阈值说明传感器的最小可测出的输入量。
《自动检测技术(第3版)》习题与思考题解答(3)

习题与思考题解答(第3章)1.试分析变面积式电容传感器和变间隙式电容传感器的灵敏度。
为了提高传感器的灵敏度可采取什么措施并应注意什么问题?变面积式电容传感器的灵敏度为:b Kdε=-增加 b 或减小 d 均可提高传感器的灵敏度。
2.为什么说变间隙型电容传感器特性是非线性的?采取什么措施可改善其非线性特性?变间隙式电容传感器的电容 C 与x 不是线性关系,只有当x 远小于 d 时,才可认为是近似线性,要提高灵敏度,应减小起始间隙。
在实际应用中,为了提高灵敏度,减小非线性,可采用差动式结构。
3.有一平面直线位移型差动电容传感器其测量电路采用变压器交流电桥,结构组成如图3-20所示。
电容传感器起始时b1=b2=b=20mm,a1-a2=a=10mm,极距d=2mm,极间介质为空气,测量电路中u i=3sinωt V,且u=u i。
试求动极板上输入一位移量△x=5mm时的电桥输出电压u o。
解:当动极板移动Δx 后,覆盖面积就发生了变化,电容也随之改变,其值为0()b a x bC C x ddεε-∆==-∆电容因位移而产生的变化量为00bx C C C x C daε∆∆=-=-∆=- 题图电路中接入了差动电容器,其空载输出电压可以用下式表示()()()()00000OC C C C C U U U C C C C C -∆-+∆∆==-+∆+-∆ 将0xC C a∆∆=-代入上式得到 Ox U U a∆= 51==102Ox U U U U a ∆= 013sin V=1.5sin V 22i t u u t ωω==4.变间隙电容传感器的测量电路为运算放大器电路,如图3-21所示。
传感器的起始电容量C x0=20pF ,定动极板距离d 0=1.5mm ,C 0=10pF ,运算放大器为理想放大器(即K →∞,Z i →∞),R f 极大,输入电压u i =5sinωt V。
求当电容传感器动极板上输入一位移量Δx=0.15mm 使d 0减小时,电路输出电压u o 为多少?解:根据图3-24所示的连接方法,可得()()01/1/x oii x j C C U U U j C C ωω=-=-初始时00020pF=20pFx AC d A d εε==⨯当极板移动时()312030020pF 1.510201022.2pF 1.50.1510x d AC d x d x ε---⨯⨯⨯⨯====-∆-∆-⨯所以010pF=0.4522.2pF0.455sin V= 2.25sin Voi i i x o C U U U U C u t t ωω=-=--=-⨯-5.如图3-22所示正方形平板电容器,极板长度a =4cm ,极板间距离δ=0.2mm 。
机械工程《传感器与检测技术》测试技术实验指导书
机械工程《传感器与检测技术》测试技术实验指导书机械工程测试技术实验指导书——传感器与检测技术罗烈雷编机械工程系机械工程测试技术实验指导书——传感器与检测技术一、测试技术实验的地位和作用《传感器与检测技术》课程,在高等理工科院校机械类各专业的教学打算中,是一门重要的专业基础课,而实验课是完成本课程教学的重要环节。
其要紧任务是通过实验巩固和消化课堂所讲授理论内容的明白得,把握常用传感器的工作原理和使用方法,提高学生的动手能力和学习爱好。
其目的是使学生把握非电量检测的差不多方法和选用传感器的原则,培养学生独立处理问题和解决问题的能力。
二、应达到的实验能力标准1、通过应变式传感器实验,把握理论课上所讲授的应变片的工作原理,并验证单臂、半桥、全桥的性能及相互之间关系。
2、通过差动变压器静态位移性能测试和差动变压器零点残余电压的补偿电路设计,把握理论课上所讲授的差动变压器的工作原理和零点残余电压的补偿措施。
3、通过电涡流式传感器的静态标定和被测体材料对电涡流式传感器特性的阻碍实验,把握理论课上所讲授的电涡流式传感器的原理及工作性能,验证不同性质被测体材料对电涡流式传感器性能的阻碍。
4、通过差动面积式电容传感器的静态及动态特性测试,了解差动面积式电容传感器的工作原理及其特性。
5、通过磁电感应式传感器的性能和霍尔式传感器直流静态位移特性的测试方法,把握磁电感应式传感器的工作原理及其性能和霍尔式传感器的工作原理及其特能。
6、通过压电式传感器的动态响应和引线电容对电压放大器与电荷放大器的阻碍实验,把握压电式传感器的原理、结构及应用和验证引线电容对电压放大器的阻碍,了解电荷放大器的原理和使用方法。
7、通过光敏三极管和光敏电阻的性能测试,把握光电传感器的原理与应用方法。
8、热电偶和热敏电阻的性能测试的方法,把握热电偶的原理和 NTC 热敏电阻的工作原理和使用方法,并对传感器灵敏度线性度进行分析。
9、通过差动放大器和低通滤波器设计和测试,把握差动放大器和滤波器的设计方法和性能测试方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四差动变面积式电容传感器的静态特性
实验目的:了解差动变面积式电容传感器的原理及其特性。
实验原理:电容式传感器有多种形式,本仪器中是差动变面积式的电容传感器。
该传感器由两组定片和一组动片组成。
当安装于振动台上的动片上、下改变位置,与两组静片之间的重叠面积发生变化,极间电容也发生相应变化,成为差动电容。
上层定片与动片形成的电容定为C1,下层定片与动片形成的电容定为C2,如将C1 和C2 接入桥路作为相邻两臂时,桥路的输出电压与电容量的变化有关,即与振动台的位移有关。
所需单元及部件:电容传感器、电容放大器、差动放大器、低通滤波器、F/V表、测微头。
有关旋钮的初始位置:差动放大器增益旋钮置于中间,F/V表置于2V档,
实验步骤:
(1)按图2接线。
图2
(2)F/V表打到20V,调节测微头,使输出为零。
(3)转动测微头,每次0.25mm,记下此时测微头的读数及电压表的读数,直至电容动片与上(或下)静片覆盖面积最大为止。
化),并作出V-X关系曲线。
(5)断开主副电源,拔掉连接线,将测微头旋转离开振动台,将连接线整理好,清理桌面,将凳子放回原处,检查东西是否缺少,整理完毕,方可离开实验室。
差动变面积式电容传感器的静态特性(实物连接图)。