第5章 广义最小二乘法
中国农业大学《计量经济学》(6 广义最小二乘法(GLS)与异

——对于线性函数,模型参数可以通过求解由一阶条件构成的 方程组估计得出;
——对于非线性方程,我们常常无法确保得到估计参数的解析 解,但通常能够利用数值逼近方法得到方程组的近似解。 此时估计参数可能不是唯一的,并且存在收敛困难。
线性性、无偏性、最小方差性
~
Var(b )
E
~ (b
b
~ )(b
b
)
E (
X
1X
)
1X
1
1uu
1X
(
X
1X
)
1
2 u
(
X
1
X
)1
s 4、
2 u
的估计:
2 e*e* * n k 1
二、异方差
1、含义
Var(ui
)
2 u
f
(
X
i
)
i 1,2,...n
即可:通u过i在散解点释图变观量察取。不同值时方差不同,异方差是X 的函数。
um
1 ni
Yi ni
Yij
j 1
1 ni
X i1 ni
X ij1
j 1
1 ni
X i2 ni
X ij 2
j 1
(i 1, 2, ...,m)
(i 1, 2,...,m)
(i 1, 2,...,m)
1 ni
X ik
ni
X ijk
j 1
(i 1, 2,...,m)
1
E(ui
4
NLS估计技术
求解非线性方程组的常用方法:
——线性化迭代求解法(Iterative linearization method),即从一组参数的初始值开始将非线性 函数线性化,然后求解线性方程组并得到新的估 计值;重复上述步骤直到估计结果达到收敛标准 或达到最大迭代次数时为止。
广义最小二乘法

FGLS估计—
异方差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5.1 4.5.2 4.5.3 产生原因 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 异方差 . . . . . . . . . . . . . . . . . . . . . . . 估计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 X 2. limn →∞ n
(4.1)
是一个正定对角矩阵;
X = Q∗ ,其中, Q∗ 正定、有限。
假设 1 是我们本章考虑的重点,我们将干扰项的方差-协方差矩阵从经典 OLS 回归模型中 的 σ 2 I 一般化为非均齐方差 σ 2 。这是一般化线性回归模型的根本特点。利用该假设,我们可
以捕捉单个干扰项的方差,即, V ar (ε) 对角线上的元素的差异(这就是我们后面将要提到的异 方差问题);同时也可以捕捉两个干扰项之间的同期相关性,即, V ar (ε) 非对角线上的元素不 为零(如后面提到的自相关和 SURE 模型)。处理一般化模型的基本思路是通过一些变换,使 其满足经典 OLS 回归模型中的基本假设,然后采用 OLS 进行估计即可。 假设 2 也是一个新加的假设条件。它限制了样本矩阵 X 和方差-协方差矩阵 σ 2 的关系,
谢所有耐心读完这份笔记的同学,希望你们把发现的错误和不妥之处E-mail 给我以便于我做进 一步的修改。
矩阵论-第五章-广义逆及最小二乘

第五章 广义逆及最小二乘解在应用上见得最频繁的、大约莫过于线性方程组了。
作一番调查或整理一批实验数据,常常归结为一个线性方程组:Ax b =然而是否是相容方程呢?倘若不是,又如何处理呢?最小二乘解是常见的一种处理方法。
其实它不过是最小二乘法的代数形式而已。
广义逆从1935年Moore 提出以后,未得响应。
据说: (S.L.Campbell & C.D.Meyer.Jr Generalized Inverses of Linear Transformations 1979 P9)原因之一,可能是他给出的定义,有点晦涩。
其后,1955年Penrose 给出了现在大都采用的定义以后,对广义逆的研究起了影响,三十年来,广义逆无论在理论还是应用上都有了巨大发展,一直成为了线性代数中不可缺少的内容之一。
为了讨论的顺利进行,我们在第一节中先给出点准备,作出矩阵的奇值分解。
§5.1 矩阵的酉交分解、满秩分解和奇值分解在线行空间中,知道一个线性变换在不同基偶下的矩阵表示是相抵的或等价的。
用矩阵的语言来说,就是:若 ,m n A B C ×∈,倘有非异矩阵()P m n ×,()Q n n ×存在,使B PAQ =则称A 与B 相抵的或等价的。
利用初等变换容易证明m n A C ×∈,秩为r ,则必有P ,Q ,使000r m nI PAQ C ×⎛⎞=∈⎜⎟⎝⎠(5.1-1) 其中r I 是r 阶单位阵。
在酉空间中,上面的说法,当然也成立,如果加上P ,Q 是酉交阵的要求,情形又如何呢?下面就来讨论这个问题。
定理 5.1.1 (酉交分解) m n A C ×∈,且秩为r ,则(),(),,H H m n U m n V n n U U I V V I ∃××==,使00r HU AV Δ⎛⎞=×⎜⎟⎝⎠(m n) (5.1-2) 其中r Δ为r 阶非异下三角阵。
(完整word版)多种最小二乘算法分析+算法特点总结

第一部分:程序设计思路、辨识结果分析和算法特点总结 (3)一:RLS遗忘因子法 (3)RLS遗忘因子法仿真思路和辨识结果 (3)遗忘因子法的特点: (4)二:RFF遗忘因子递推算法 (4)仿真思路和辨识结果 (4)遗忘因子递推算法的特点: (6)三:RFM限定记忆法 (6)仿真思路和辨识结果 (6)RFM限定记忆法的特点: (7)四:RCLS偏差补偿最小二乘法 (7)仿真思路和辨识结果 (7)RCLS偏差补偿最小二乘递推算法的特点: (9)五:增广最小二乘法 (9)仿真思路和辨识结果 (9)RELS增广最小二乘递推算法的特点: (11)六:RGLS广义最小二乘法 (11)仿真思路和辨识结果 (11)RGLS广义最小二乘法的特点: (13)七:RIV辅助变量法 (14)仿真思路和辨识结果 (14)RIV辅助变量法的特点: (15)八:Cor-ls相关最小二乘法(二步法) (15)仿真思路和辨识结果 (15)Cor—ls相关最小二乘法(二步法)特点: (17)九:MLS多级最小二乘法 (17)仿真思路和辨识结果 (17)MLS多级最小二乘法的特点: (21)十:yule_walker辨识算法 (21)仿真思路和辨识结果 (21)yule_walker辨识算法的特点: (22)第二部分:matlab程序 (23)一:RLS遗忘因子算法程序 (23)二:RFF遗忘因子递推算法 (24)三:RFM限定记忆法 (26)四:RCLS偏差补偿最小二乘递推算法 (29)五:RELS增广最小二乘的递推算法 (31)六;RGLS 广义最小二乘的递推算法 (33)七:Tally辅助变量最小二乘的递推算法 (37)八:Cor-ls相关最小二乘法(二步法) (39)九:MLS多级最小二乘法 (42)十yule_walker辨识算法 (46)第一部分:程序设计思路、辨识结果分析和算法特点总结一:RLS遗忘因子法RLS遗忘因子法仿真思路和辨识结果仿真对象如下:其中, v(k )为服从N(0,1)分布的白噪声。
广义最小二乘法
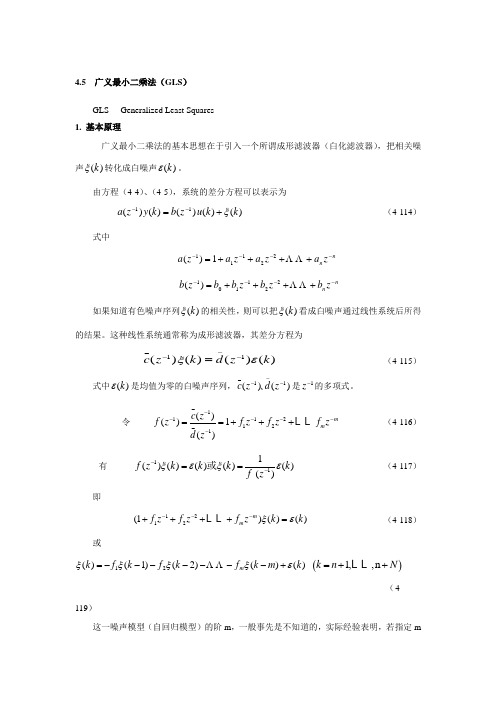
4.5 广义最小二乘法(GLS ) GLS----Generalized Least Squares 1. 基本原理广义最小二乘法的基本思想在于引入一个所谓成形滤波器(白化滤波器),把相关噪声)(k ξ转化成白噪声)(k ε。
由方程(4-4)、(4-5),系统的差分方程可以表示为)()()()()(11k k u z b k y z a ξ+=-- (4-114)式中n n z a z a z a z a ----++++=ΛΛ221111)(nn z b z b z b b z b ----++++=ΛΛ221101)(如果知道有色噪声序列)(k ξ的相关性,则可以把)(k ξ看成白噪声通过线性系统后所得的结果。
这种线性系统通常称为成形滤波器,其差分方程为)()()()(11_k z d k zc εξ---= (4-115)式中)(k ε是均值为零的白噪声序列,)()(11_---z d 、z c 是1-z 的多项式。
令 _111212_1()()1()m m c z f z f z f z f z d z ------==+++L L (4-116)有 )()(1)()()()(11k z f k k k z f εξεξ--==或 (4-117)即1212(1)()()m m f z f z f z k k ξε---++++=L L (4-118)或)()()2()1()(21k m k f k f k f k m εξξξξ+-------=ΛΛ ()1,,n k n N =++L L(4-119)这一噪声模型(自回归模型)的阶m ,一般事先是不知道的,实际经验表明,若指定m为2或3,就可以获得令人满意的描述)(k ξ的模型。
把方程(4-119)看作输入为零的差分方程,并由此式来写出N 个方程。
⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧++-+---+--+-=+++-+---+-=+++-+-----=+)()()2()1()()2()2()()1()2()1()1()1()()1(212121N n m N n f N n f N n f N n n m n f n f n f n n m n f n f n f n m m m εξξξξεξξξξεξξξξΛΛM ΛΛΛΛ写成向量矩阵形式为εξ+Ω=f (4-120)其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++=)()1(N n n ξξξM ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m f f f M 1,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++=)()1(N n n εεεM ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+--+--+--+--+--+----=Ω)()2()1()2()()1()1()1()(m N n N n N n m n n n m n n n ξξξξξξξξξM Λ(4-120)式所示的线性组合关系是辨识问题的基本表达形式,称作最小二乘格式。
第五章:(一) 序列相关性
• 检验步骤 ①计算D.W.统计量的值, ②根据样本容量T和解释变量数目k,查D.W. 分布表,得到临界值dL和dU, ③按照下列准则考察计算得到的D.W.值,以判 断模型的自相关状态。
若 0<D.W.<dL dL<D.W.<dU dU<D.W.<4-dU
则存在正自相关 不能确定 无自相关
4-dU<D.W.<4-dL
– 采用时间序列数据建立计量经济学模型,无论是平稳 时间序列和非平稳时间序列,模型随机误差项一般都 存在序列相关,这就违背了经典模型的一个重要的基 本假设。 – 所以模型的序列相关性肯定是时间序列计量经济学模 型必须重点讨论的一个问题。
§5.1时间序列模型的序列相关性 Serial Correlation
(2)模型设定偏误:不正确的函数形式
例:如果边际成本模型应为:
Yt 0 1Xt 2Xt2 t
其中:Y=边际成本,X=产出。 但在建模时误将模型设定为: Yt 0 1Xt t 因此,由于vt 2Xt2 t ,包含了产出的平方对随 机误差项的系统性影响,随机误差项也呈现序列相 关性。
• 雨果说“所谓活着的人就是不断挑战的 人,不断攀登命运峻峰的人。”时间总 是在你颓废的一无所有的时候残酷的炫 耀这些年来那些曾经和你一个起跑线的 人的辉煌成就,然后在你的脑海里公示 奋斗的重要性。我们向命运低下高贵的 头颅,蜷进狭小的天地顾影自怜的时候, 别人的天已经无比辽阔了。
• 时间序列模型的序列相关问题(§5.1节)
(3)数据的“编造”
例:如果季度数据来自月度数据的简单平均, 那么这种平均的计算会减弱每月数据的波动而使 季度数据更为平滑,从而使随机干扰项出现序列 相关。 此外,当历史数据缺失时,在两个时间点之 间采用“内插”技术,也可能导致随机干扰项出 现序列相关。 一般经验告诉我们,对于采用时间序列数据 作样本的计量经济学问题,由于在不同样本点上 解释变量以外的其他因素在时间上的连续性,带 来它们对被解释变量的影响的连续性,所以往往 存在序列相关。
广义最小二乘法的推导

广义最小二乘法的推导1. 引言广义最小二乘法(Generalized Least Squares, GLS)是一种用于解决线性回归问题的方法。
与最小二乘法相比,GLS可以处理数据中存在异方差(heteroscedasticity)和自相关(autocorrelation)的情况,提高了回归模型的准确性和效果。
在本文中,我们将详细推导广义最小二乘法的数学原理和推导过程。
首先,我们将介绍最小二乘法的基本概念和原理,然后讨论广义最小二乘法的推导过程,并最后给出一个示例来说明广义最小二乘法的应用。
2. 最小二乘法最小二乘法是一种常用的用于拟合线性回归模型的方法。
其基本思想是通过最小化残差平方和来选择最优的回归系数。
对于一个具有n个数据点的线性回归模型:Y=Xβ+ε其中,Y是n维的因变量向量,X是n行p列的自变量矩阵,β是p维的系数向量,ε是n维的误差向量。
最小二乘法的目标是找到最优的β,使得残差平方和最小:εTεminβ通过对目标函数求导,并令导数等于零,可以得到最优解的闭式解表达式:β̂=(X T X)−1X T Y其中,β̂表示最优的回归系数。
3. 广义最小二乘法最小二乘法假设误差项具有同方差且不相关的性质,然而在实际问题中,数据往往存在异方差和自相关的情况。
为了解决这些问题,我们引入广义最小二乘法。
3.1 异方差问题当误差项具有异方差性质时,最小二乘法的估计结果可能是偏误的。
为了解决异方差问题,我们可以对误差项进行加权处理。
假设误差项的方差为σi2,我们可以使用加权最小二乘法来估计回归系数。
目标函数可以表示为:minεT Wεβ其中,W是一个对角矩阵,对角线元素为σi−2。
通过对目标函数求导,并令导数等于零,可以得到最优解的闭式解表达式:β̂GLS=(X T WX)−1X T WYβ̂GLS表示广义最小二乘法的估计系数。
3.2 自相关问题当误差项存在自相关性质时,最小二乘法的估计结果也可能是偏误的。
广义空间两阶段最小二乘法stata代码

广义空间两阶段最小二乘法stata代码
广义空间两阶段最小二乘法是一种用于解决具有内生性问题的经济学分析方法,它可以有效地控制内生变量对估计结果的影响。
下面是一份stata代码,以便更好地理解这种方法的实现:
第一阶段:
reg instrument1 instrument2 control1 ... controlk, robust 生成一个工具变量回归模型,其中instrument1和instrument2是被认为与内生自变量有关联的工具变量,control1到controlk是被认为影响被解释变量但不影响内生自变量的控制变量。
robust选项指定鲁棒标准误,以避免误差项的异方差性问题。
predict ivresid1, resid
将第一阶段的残差(即ivresid1)预测出来,并用其代替内生自变量,以控制内生性问题的影响。
第二阶段:
reg y ivresid1 control1 ... controlk, robust
生成第二阶段回归模型,其中y是被解释变量,ivresid1是第一阶段生成的工具变量残差,control1到controlk是被认为影响被解释变量但不影响内生自变量的控制变量。
再次指定robust选项来控制标准误。
通过这种方法,广义空间两阶段最小二乘法可以有效地控制内生性问题,得到更可靠的估计结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
武汉大学经济学系数量经济学教研室《实践教改项目组》 编
广义最小二乘法运用环境
当计量经济学模型同时存在序列相关和 异方差,而且随机误差项的方差-协方差矩 阵未知时我们可以考虑使用广义最小二 乘法(GLS)。即下列模型:
满足这样一些条件:
如果模型存在一阶自相关
案例
以序列相关中的案例为例:首先我们计算ρ , 我们可以直接根据OLS估计出来的DW来计算, p=1-DW/2, 在上例中,DW=0.6279,因此p=0.6861在这个 基础上,我们可以写出这个方差-协方差矩阵 建立对称矩阵的命令为 sym(24,24)fact
方差-协方差矩阵(fact)
分解矩阵
将上面的方差协方差矩阵进行cholesky分 解,以得到分解后的矩阵D,命令为 Matrix fact1=@cholesky(fact) 对于分解后的矩阵fact1,我们运用命令 matrix fact=@transpose(fact1),我们就 可以得到最初的方差协方差矩阵。
分解矩阵(fact1)
求逆矩阵
通过求解fact1的逆矩阵,我们就可以对 原数据进行变化,从而消除异方差和序 列相关,求解逆矩阵的命令为 Matrix fact2=@inverse(fact1) 得到其逆矩阵如下:
逆矩阵(fact2)
数据转换
数据转换命令为: matrix m1=fact2*m Matrix gdp1=fact2*gdp数据
Ols估计
估计变换后的数据,我们进行最小二乘估计得到估计结果
结果分析
通过对DW值的观察我们可以看出,尽管我们不能排除随机误差 项之间仍然存在序列相关性,然而模型的准确性比数据变化前有 所提高。之所以没有完全消除序列相关性,根据我们上一章的分 析知道是由于随机误差项之间存在二阶自相关,而这里我们是以 一阶自相关为基础对数据进行处理的。因此,按照同样的方法, 我们写出二阶自相关的方差协方差矩阵,并对数据进行变化,便 可以消除随机误差项之间存在的序列相关性。 值得注意的是,由于广义最小二乘法的实用性,因此当我们拿到 数据时,无论它是否存在异方差性或者序列相关性,我们均可以 直接运用GLS方法进行估计。在有异方差性或者序列相关性时, 即可消除,如果不存在,同样不会影响估计结果。