第四章:边角网坐标平差算例
6.4 第十九讲 导线网间接平差
第十九讲 边角网平差和间接平差的应用举例
一、导线网间接平差函数模型 测边:
vs jk X 0 jk S
0 jk
令:a jk
0 Y jk 2 (S 0 jk )
, b jk
X 0 jk
2 (S 0 jk )
ˆj x
0 Y jk
S
0 jk
ˆj y
ˆ pl px
i 1 i i 1
n
i i
0
ˆ x
pl
i 1 n
n
i i
p
i 1
ˆ X x ˆX X
0 0
pl
i 1 n
n
i i
i
p
i 1
i
单位权中误差
V T PV 0 n 1
L 0
i
1 pi
又QXX N
1
1
p
i 1
n
X ˆ 0 QXX ˆ ˆ 0
L1 L l 2 Ln
p1 1 1 n p 2 T p N B PB 1 1 1 i 1 i p n 1 p1 L1 L n p 2 2 T p L W B Pl 1 1 1 i i i 1 pn Ln
10
S 1.0 S (m) (mm)
102 100 pSi 2 S i ( m) (1.0 Si (m))
p 1
i
第十九讲 边角网平差和间接平差的应用举例
例:如图,一个单三角形,观测了三个内角 L1 , L2 , L3 和 X 两条边S1,S2,观测值及观测精度如下:
测边测角三角网的平差
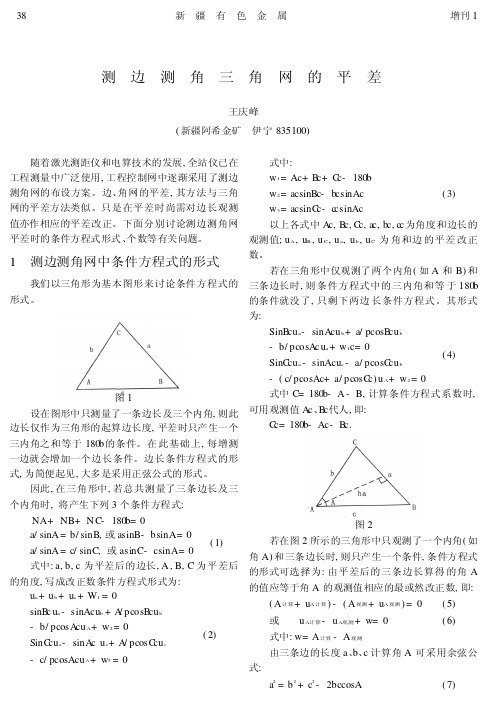
测边测角三角网的平差王庆峰(新疆阿希金矿伊宁835100)随着激光测距仪和电算技术的发展,全站仪已在工程测量中广泛使用,工程控制网中逐渐采用了测边测角网的布设方案。
边、角网的平差,其方法与三角网的平差方法类似。
只是在平差时尚需对边长观测值亦作相应的平差改正。
下面分别讨论测边测角网平差时的条件方程式形式、个数等有关问题。
1测边测角网中条件方程式的形式我们以三角形为基本图形来讨论条件方程式的形式。
图1设在图形中只测量了一条边长及三个内角,则此边长仅作为三角形的起算边长度,平差时只产生一个三内角之和等于180b的条件。
在此基础上,每增测一边就会增加一个边长条件。
边长条件方程式的形式,为简便起见,大多是采用正弦公式的形式。
因此,在三角形中,若总共测量了三条边长及三个内角时,将产生下列3个条件方程式:NA+NB+N C-180b=0a/sinA=b/sinB,或asinB-bsinA=0a/sinA=c/sinC,或asinC-csinA=0(1)式中:a,b,c为平差后的边长,A,B,C为平差后的角度,写成改正数条件方程式形式为:u a+u b+u c+W1=0sinB c u a-sinAcu b+A/pcosB cu b-b/pcosA cu A+w2=0 S++3=(2)式中:w1=Ac+B c+C c-180bw2=acsinBc-b csinAcw3=acsinC c-c csinAc(3)以上各式中A c,B c,C c,a c,b c,c c为角度和边长的观测值;u A,u B,u C,u a,u b,u C为角和边的平差改正数。
若在三角形中仅观测了两个内角(如A和B)和三条边长时,则条件方程式中的三内角和等于180b的条件就没了,只剩下两边长条件方程式。
其形式为:SinB cu a-sinA cu b+a/pcosB cu b-b/pcosA c u a+w1c=0SinC cu a-sinAcu c-a/pcosC cu b-(c/pcosAc+a/pcosC c)u A+w2=0(4)式中C=180b-A-B,计算条件方程式系数时,可用观测值A c、B c代人,即:C c=180b-Ac-Bc.图2若在图2所示的三角形中只观测了一个内角(如角A)和三条边长时,则只产生一个条件,条件方程式的形式可选择为:由平差后的三条边长算得的角A的值应等于角A的观测值相应的最或然改正数,即:(A计算+u A计算)-(A观测+u A观测)=0(5)或u A计算-u A观测+w=0(6)式中:w=A计算-A观测由三条边的长度、、计算角可采用余弦公式=+()38新疆有色金属增刊1inC cu a-sinA c u c A/pcosC cu c -c/pcosAcu A w0a b c A:a2b2c2-2bccosA7即:A 计算=cos-1b 2+c 2-a 2/2bc(8)为了求得u A 计算,微分(7)式得:2ada=2bdb+2cdc-2ccosAdb-2bcosAdc+2bcsinA dA d/p d 式中的d 为微分符号所以dAd/p d=ac/b cc csinA c da-(b cc ccosAc)/(b cc csinAc)db-c c-bcosA c/b cc c sinAcdc(9)因为a/bcsinA c=1/h a (h a 为a 边上的高)b-ccosAc/bcsinAc=acosC c/bcsinA c=cosCc/h a c-bcosAc/bcsinAc=acosB c/bcsinAc=cosB c/h a(10)用改正数代替式(9)中的微分元素,并将式(10)代入,得u A 计算=p d/h A u A -p dcosC c/h A u b-p dcosB c/h A u c(11)因此,条件方程式(11)的最后公式为:P d/h 2u a -p dcosC c/h A u b -p dcosB c/h a u C-u A 观测+w=0(12)式中角B c 和角C c 可按正弦公式求得,即SinB c=sinA c/a cb c SinCc=sinA c/a cc c2测边测角三角网中条件的个数测边测角自由三角网中,条件方程式的总数可按下式确定:r=N+S-2n+3式中:n 为网中三角点的个数;N 为观测角度的个数;S为观测边长的条数。
第4讲测边网条件平差

2、条件方程的列立
可以得出图1中角β 1、β 2及β 3改正数与各边改正数之间的关系式
v (vS cosABCvS cosACBvS ) h1 v (vS cosACDvS cosADCvS ) h2 v (vS cosABDvS cosADBvS ) h3
2S a dSa (2Sb 2Sc cos A)dSb (2Sc 2Sb cos A)dSc 2Sb Sc sin AdA 1 dA ( S a dSa ( S b S c cos A)dSb ( S c S b cos A)dSc ) S b S c sin A
vA
ha
(vS a cosCvSb cos BvSc )
A
上式有如下规律:
VA式的右端的括号外为 ; ha
括号中角A的对边改正数 v Sa 的系数为+1, 角A的两个邻边改正数 v Sb 和 v Sc 的系数都是该边邻角 的负余弦。
C
ha hc
Sc
Sb
hb
Sa B
将上式中的微分换成相应的改正数,同时考虑到式中dA的单 位是弧度,而角度改正数是以(”)为单位,故上式可写成:
vA
ha
(vS a cosCvSb cos BvSc )
A
这就是角度改正数与三个边长改正数 之间的关系式,以后称该式为角度改 正数方程。
C
Sb
ha hc
Sa
Sc
hb
B
2、条件方程的列立
2、其余三条边S4、S5及S6的改正数之系 数,分别是 A 点到该边高 h3 、 h1 及 h2 的
B
h3
坐标平差计算范文
坐标平差计算范文一、坐标平差计算的基本概念1.坐标平差:坐标平差是指通过测量数据处理的方法,对已知点的观测值进行加权平均,以消除观测误差,得到更加准确的坐标值。
2.误差:误差是指测量结果与真实值之间的差别。
在坐标平差计算中,会遇到随机误差和系统误差。
3.权数:权数是指用于表示不同测量数据精度的数值,精度越高的数据对平差结果的影响越大,其计算方式主要根据测量数据的精度等级进行确定。
二、坐标平差计算的原理三、坐标平差计算的方法在坐标平差计算中,常用的方法主要包括条件平差和自由平差。
1.条件平差:条件平差是指在一定的约束条件下,对已知点和未知点进行平差计算。
常见的条件平差方法有概略平差法、四参数平差法和七参数平差法等。
2.自由平差:自由平差是指在不受约束的条件下,仅通过已知点的观测值进行平差计算。
常见的自由平差方法有最小二乘平差法、双差平差法和三差平差法等。
四、坐标平差计算的步骤1.数据预处理:包括观测数据的去粗差、异常值的检测和剔除等。
2.条件方程建立:根据已知点的观测值和待求点的位置关系,建立平差方程。
3.带权观测值计算:根据观测数据的精度等级,计算观测值的权数。
4.未知量估计:通过最小二乘法求解平差方程,估计未知量的值。
5.后期检查:对平差结果进行后期检查,包括残差分析、精度评定等。
五、应用举例总之,坐标平差计算是一种常用的测量数据处理方法,通过建立平差方程和使用最小二乘法等数学方法,可以消除测量误差,得到更加准确的测量结果。
在实际应用中,需要根据具体问题选择合适的平差方法和进行后期检查,确保结果的精度和可靠性。
条件平差算例

一、水准网条件平差示例 范例:有一水准网(如图8-3所示),已知点A ,B 的高程为: HA=50.000m , HB=40.000 m ,观测高差及路线长度见表8-1。
试用条件平差求:(1) 各观测高差的平差值;(2) 平差后P 1到P 2点间高差的中误差。
图8-3【解】1)、求条件方程个数;由图易知:n=7,t=3,条件式r=4。
故应列4个平差值条件方程,三个闭合环,一个附和路线2)、列平差值条件方程; 所列4个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=-+-=--=-+=+-0ˆˆ0ˆˆˆ0ˆˆˆ0ˆˆˆ31643765521BA H H h h h h h h h h h h h 3)、转换成改正数条件方程;以ii i V L L +=ˆ代入上式可得: ⎪⎪⎭⎪⎪⎬⎫=-+-+-=--+--=-++-+=+-++-00003131643643765765521521B A H H h h v v h h h v v v h h h v v v h h h v v v 化简可得:⎪⎪⎭⎪⎪⎬⎫=--=+--=+-+=++-0403070731643765521mm mm mm mm v v v v v v v v v v v 可知条件方程系数阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----000101010110011100000010011⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2101001000210000210000010000001称对P ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2010010002000020000010000001称对Q ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----=320125100141101300100110001101001100000110010002010102200211000000100114)、组成法方程; 先求权阵P ;以1km 观测高差为单位权观测高差,则: 11=P ,12=P ,213=P ,214=P ,15=P ,16=P ,217=P ,而各观测高差两两相互独立,所以权阵为:,则协因数阵为:则,法方程的系数阵Naa 为:⎥⎥⎦⎤⎢⎢⎣⎡-----⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----==-=00010101011001110000001001120100100020000200000100000010001010101100111000000100111TT AQA T A AP aa N 称对所以,法方程为:043773212510014110134321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----k k k k 5)、解算法方程,求出联系数K⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡34831.213483.002247.177528.2437758427.025843.012360.023596.025843.032584.011236.012360.012360.011236.031461.014607.023596.012360.014608.046067.04377320125100141101314321k k k k 6)、求V 及高差平差值Lˆ 所以4210.212.118.3213.0214.418.214.0ˆ22222220⨯+⨯-+⨯-+⨯-+⨯-+⨯+⨯-==)()()()()(r PV V T σ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡==045.2157.1798.3270.0427.4775.2427.034831.213483.002247.177528.2002001100011020022000001100134831.213483.002247.177528.200001010101100111000000100112010010002000020000010000001m m T K T QA V 称对mmmm v v v v v v v h h h h h h h h h h h h h h L ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=5020.108548.56472.45007.143556.200028.153556.100.22.18.33.04.48.24.0500.10856.5651.4501.14360.20000.15356.10ˆˆˆˆˆˆˆˆ7654321765432176543217)、精度评定1)、单位权方差估值计算mm 98.24605.35±==2)、建立所求精度的平差值函数的算式,并按误差传播律求平差值函数的精度 依题意列平差值函数为: 5ˆh =ϕ 则:[]Tf 0010000=[][][][]51687.048313.01)16853.3146.0(1001111236.001124.016853.03146.0100110011111ˆˆ=-=+-=⨯---=-=-=--TTT T T aaaa N AQf N QA f Qf fQ ϕϕ所以:mm Q 14.251687.098.2ˆˆ0ˆ±=⨯==ϕϕϕσσ【答】:各观测高差的平差值为:}{m m m m m m m5020.108548.56472.45007.143556.200028.153556.10平差后P1到P2点间高差的中误差为:±2.14mm987654321ACPB 图8-11二、测角网条件平差 范例:有一测角网(如图8-11所示),A 、B 、C 三点为已知三角点,P 为待定点。
3-4三角网条件平差计算
§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
某水利工程施工控制网平差计算

某水利工程施工控制网平差计算李拥华【摘要】平差计算的目的是为控制网提供精度可靠的数据.经典测量平差方法包括四种平差模型,每种平差模型虽各有其自身的特点,但计算结果是一致的.为了检验平差计算过程的正确性,采用条件平差和间接平差两种平差方法进行计算并比较计算结果,确保平差计算结果正确可靠.【期刊名称】《北京测绘》【年(卷),期】2016(000)003【总页数】8页(P70-77)【关键词】条件平差;间接平差;控制网;精度【作者】李拥华【作者单位】湖南省地球物理地球化学勘查院/湖南省水工环地质工程勘察院,湖南长沙410000【正文语种】中文【中图分类】P258本测区位于湖南省桃源县,东经:111°29′30″,北纬:28°55′13″。
包括沅水北岸桃花源镇和南岸剪市镇,面积四平方公里。
沅水属于山溪性河流,水量丰富但航运价值不高,适宜修建水利水电设施以充分开发其资源,带动当地经济发展。
1.1 控制网网形设计水利工程施工控制网是为水利工程建筑物的施工放样服务的,其精度直接影响施工放样的精度。
为了提高水利工程设施的质量标准,需要建立与水利工程建设相适应的精度高可靠性强的施工控制网。
测区内沅水两岸灌木成林,大面积水域对GPS 观测会造成多路径效应,故此施工控制网采用图形结构稳定的大地四边形[1](如图1)。
本次水利工程施工控制网布设于2014年10月开始,截至2014年11月,外业观测和内业计算全部结束。
1.2 控制网精度指标设计测区桃源县各国家等级三角点,具有1980西安坐标系且精度均匀、可靠,可以作为本测区的平面起算依据。
经甲方同意,将国家三角点引至沅水一岸,假设起始方位角,采用局部独立坐标系,联测国家控制点,并结合工程实际情况采用局部越级布网,局部精度优于整体精度。
由于测区面积不大,为使控制点精度均匀,局部内大地四边形布设成同级全面网。
为了保证施工放样的精度,大地四边形精度指标设计为国家四等。
测边网与边角网间接平差

§12.2测边网与边角网间接平差
测边网或边角网(其实是测方向),都是把所测方向和边作为平差元素,因此这类网只要按边长观测值、方向观测值列出误差方程式,就可组成法方程式,……
误差方程式的总数等于网中观测值(所测边和角),若按方向坐标平差,未知数数目等于待定点×2+方向观测设站数(定向角未知数)。
12.2.1边长误差方程式 ()()22k i k i ki y y x x S -+-=
线性化后得 ki i ki i ki k ki ki ki Ski l y x y x V +++--=δαδαδαδα0000sin cos sin cos (12-35)
ki ki ki S S l -=0 (12-36) 00,ki ki S α由近似坐标反算的坐标方位角近似值和边长近似值,ki S 边长观测值。
①当k 点为固定点时,由于0==k k y x δδ,则
ki i ki i ki Ski l y x V ++=δαδα00sin cos (12-40)
②当i 点为固定点时,由于0==i i y x δδ,则
ki k ki ki ki Ski l y x V +--=δαδα00sin cos (12-41)
③当k,i 均为固定点时,此边是固定边,不会观测此边。
④当k,i 均为待定点观测了ki S 并作为固定边,此时采用附有条件的间接平差,将该边作为一个条件式,显然条件式的常数项等于零,
i ki i ki k ki k ki Ski y x y x V δαδαδαδα0000sin cos sin cos ++--=
12.2.2角度误差方程式(略)
12.2.3边角网误差方程式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§9.8 边角网坐标平差算例
例:今有一边角网如图1所示。
网中A 、B 、C 、D 、E 是已知点,起算数据见(表1),1P 、2P 是待定点。
同精度观测了九个角度921,,,L L L (见表2),测角中误差为5.2''±;测量了五个边长141110,,,L L L ,其观测结果及中误差见表2。
试按间接平差法求得待定点1P
定点P 13 013.493301=x m 702.651301=y m
283.468402=x m 948.79920
2=y m
2、由已知点坐标和待定点近似坐标计算待定边的坐标方位角改正数方程系数(见表3的6~9列);计算待定边的边长改正数方程的系数(见表3的10~13列)。
需要指出,坐标方位角改正数方程的系数的单位是秒/厘米,而边长改正数的系数无单位。
3、计算观测角误差方程的系数和常数项,其结果见表4的1~9行。
写出观测边误差方程的系数和常数项,其结果见表4的第10~14行。
表中,每一行表示一个误差方程;s 为每个误差方程的和检核数。
设取±2.5″为单位权中误差,则测角的权为
2
2
)
(i i m P ββμ= 令 2
2
i m βμ=,则1)5.2()5.2(2
222===i
i i m m P β
β
β(无单位) 观测边的权为 222
2
)
(i
i Li m
m m P i
β
μ=
=(秒2/cm 2)
表3
表4
3
表5
4
各观测值的权写在表4的p 列中。
v 为角度及边长的改正数,是在解出坐标改正数后计算的。
表4中,角度误差方程常数项的单位为秒,边误差方程常数项的单位为cm ,按误差方程求得观测角和观测边的改正数的单位也分别为秒和cm 。
4、法方程的组成和解算。
由表4取得误差方程的系数、常数项、和检核数和权组成法方程的系数、常数项、检核数,其结果和法方程的解算均见表5。
将解出的未知数代入法方程校核,均正确无误。
计算PV V T ,得 34.289=T PV V
将解出的未知数代入误差方程,计算观测值的改正数,结果写在表4的v 列。
5、平差值计算 (1) 坐标平差值
038.4333025.0013.49331011=+=+=x x x δm
767.6513065.0702.65131011=+=+=y y y δm
394.4684111.0283.46842022=+=+=x x x δm
960.7992012.0948.79922022=+=+=y y y δm (2) 观测值的平差值
将表4中的改正数与表2中的观测值相加,即得观测值的平差值,记于表6中。
经检核,以上平差值间消除了不符值。
检核是这样进行的:由点B 、A 和角2
ˆL 、1ˆL 计算1P 点的坐标;由点C 、B 和角5ˆL 、4ˆL 计算1P 点坐标;由点1P 和5ˆL 、7
ˆL 、13ˆL 计算2P 点坐标;由点2P 和5
ˆL
、7
ˆL 、8
ˆL 、14
ˆL 计算D 点坐标。
计算结果都和上面求得的或给定的坐标一致,此处不再列出。
(3) 待定边的坐标方位角和边长(检核)平差值。
由待定点的坐标平差值和已知点的坐标计算待定边的坐标方位角和边长平差值,结果写在表7中。
6、精度计算
(1) 单位权中误差,即测角中误差为 4.54
14289
''±=-±
=μ (2) 待定点坐标中误差
由表9-16的1-N 部分取得未知数的权倒数,计算待定点坐标及点位中误差 9.112.04.51±=±=x m cm 4.220.04.51±=±=y m cm 1.3)4.2()9.1(221±=+±=p M cm 9.112.04.51±=±=x m cm 6.223.04.52±=±=y m cm 2.3)6.2()8.1(222±=+±=p M cm
以上未知数的权倒数的单位为(厘米)2/(秒)2。