平面应力状态下的应变分析
材料学 平面应变状态分析
3 2
首先研究与其中一个主平
面 (例如主应力3 所在的平
面)垂直的斜截面上的应力
用截面法,沿求应力的
截面将单元体截为两部分,
取左下部分为研究对象
1
2 1
1
2
3
2
主应力 3 所在的两平面上是一
对自相平衡的力,因而该斜面上的应
力 , 与3 无关, 只由主应力1 , 2
决定
3
与3 垂直的斜截面上的应力可
最大切应力所在的
截面与 2 所在的主平面 O C
B
A
垂直,并与1和3所在的
主平面成45°角.
3
2
1
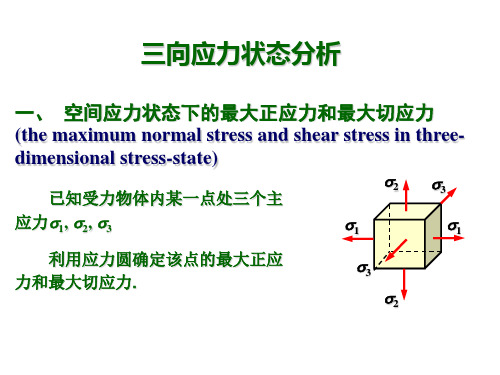
例题9 单元体的应力如图所示,作应力圆, 并求出主应力和最大 切应力值及其作用面方位.
解: 该单元体有一个已知主应力
y 20MPa
因此与该主平面正交的各截
面上的应力与主应力z 无关, 依据
x截面和y 截面上的应力画出应力
假设:
O
(1)O点处沿任意方向的微段内, 应变是均匀的;
x'
x
(2)变形在线弹性范围内都是微小的, 叠加原理成立;
分别计算 x ,y ,xy单独存在时的线应变 和切应变,然后 叠加得这些应变分量同时存在时的和 .
1.推导线应变 ( Derive the linear strain)
从O点沿 x′方向取出一微段 OP = dx′, 并以它作为矩形 OAPB
的对角线.
y y'
该矩形的两边长分别为 dx 和 dy
x'
B
P
dy dx'
O
dx A
x
(1)只有正值x 存在
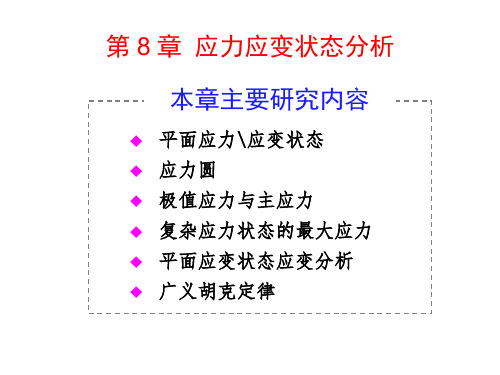
弹性力学-平面应力-平面应变问题

平面应力问题的求解方法
解析法
实验法
通过数学分析的方法,将问题转化为 数学方程进行求解。适用于简单几何 形状和边界条件的问题。
通过实验测试来测量物体的应力分布, 通常需要制作模型并进行加载测试。 适用于无法通过理论分析求解的问题。
有限元法
将物体离散化为有限个小的单元,通 过求解每个单元的平衡方程来得到整 个物体的应力分布。适用于复杂几何 形状和边界条件的问题。
弹性力学的基本方程
描述物体在受力后的应力 与应变之间的关系。
描述物体在受力后发生的 位移和应变关系。
描述物体内部力的平衡关 系03
平面应力问题
平面应力问题的定义
平面应力问题是指在弹性力学中,物 体受到的应力作用在某一平面内,且 在该平面上没有作用力的问题。
平面应力问题通常适用于薄板、薄壳 等二维结构,其中应力分量在某一平 面内变化,而垂直于该平面的方向上 ,应力和应变均为零。
THANKS
感谢观看
04
平面应变问题
平面应变问题的定义
平面应变问题是指在弹性力学中,应变和应力都仅发生在某一平面内的现象。在 此情况下,应变和应力分量都与离开平面的距离无关。
平面应变问题通常出现在薄壁结构、板壳结构等二维结构中,其中主要的变形和 应力分布都在一个平面内。
平面应变问题的求解方法
1 2 3
有限元法
通过将问题离散化为有限个小的单元,利用弹性 力学的平衡方程和变形协调方程,求解每个单元 的应力、应变和位移。
跨学科的研究
与其他学科的交叉研究 可能会带来新的思想和 理论。例如,与物理学 、化学、生物学等学科 的交叉可能会为弹性力 学的研究提供新的视角 和思路。
实验与理论的结 合
实验技术的发展将有助 于更好地验证理论的正 确性和实用性。同时, 理论的发展也将为实验 提供更好的指导。因此 ,实验与理论的结合将 是未来研究的一个重要 方向。
第七章应力状态及应变状态分析
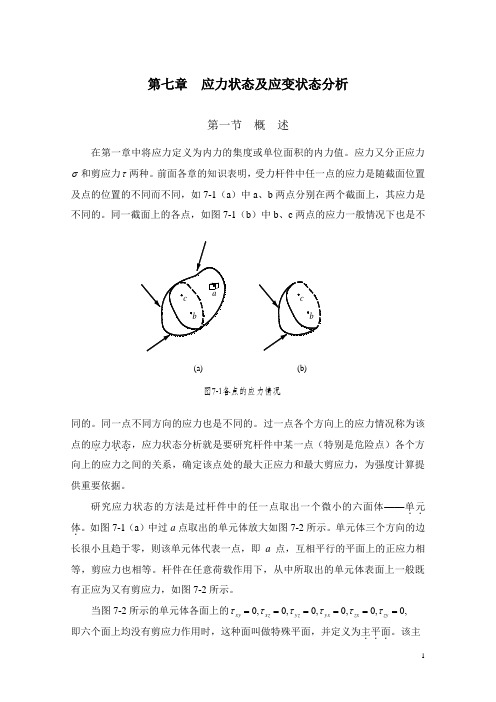
第七章 应力状态及应变状态分析第一节 概 述在第一章中将应力定义为内力的集度或单位面积的内力值。
应力又分正应力σ和剪应力τ两种。
前面各章的知识表明,受力杆件中任一点的应力是随截面位置及点的位置的不同而不同,如7-1(a )中a 、b 两点分别在两个截面上,其应力是不同的。
同一截面上的各点,如图7-1(b )中b 、c 两点的应力一般情况下也是不同的。
同一点不同方向的应力也是不同的。
过一点各个方向上的应力情况称为该点的应力状态....,应力状态分析就是要研究杆件中某一点(特别是危险点)各个方向上的应力之间的关系,确定该点处的最大正应力和最大剪应力,为强度计算提供重要依据。
研究应力状态的方法是过杆件中的任一点取出一个微小的六面体——单元..体.。
如图7-1(a )中过a 点取出的单元体放大如图7-2所示。
单元体三个方向的边长很小且趋于零,则该单元体代表一点,即a 点,互相平行的平面上的正应力相等,剪应力也相等。
杆件在任意荷载作用下,从中所取出的单元体表面上一般既有正应为又有剪应力,如图7-2所示。
当图7-2所示的单元体各面上的,0,0,0,0,0,0======zy zx yx yz xz xy ττττττ 即六个面上均没有剪应力作用时,这种面叫做特殊平面,并定义为主平面...。
该主(a)(b)图7-1各点的应力情况平面上作用的正应力称为主应力...,用,,,321σσσ表示(,321σσσ≥≥),如图7-3所示。
各面均为主平面的单元体,称为主单元体....。
三个主应力中若有两个等于零一个不等于零,该单元体称为单向应力状态......,如图7-4(a );三个主应力中有一个等于零,两个不等于零,该单元体称为二向应...力状态...,如图7-4(b );三个主应力均不等于零,该单元体称为三向应力状态......,如7-3。
单向应力状态和二向应力状态属平面应力状态,三向应力状态属空间应力状.....态.。
工程力学-应力状态与应力状态分析
8 应力状态与应变状态分析1、应力状态的概念,2、平面应力状态下的应力分析,3、主平面是切应力为零的平面,主应力是作用于主平面上的正应力。
(1)过一点总存在三对相互垂直的主平面,对应三个主应力,主应力排列规定按代数值由大到小为:321σσσ≥≥最大切应力为132max σστ-=(2)任斜截面上的应力ατασσσσσα2sin 2cos 22xy yx yx --++=ατασστα2cos 2sin 2xy yx +-=(3) 主应力的大小22minmax )2(2xyyx yx τσσσσσ+-±+=主平面的方位y x xytg σστα--=2204、主应变122122x y x y xy xyx y()()tg εεεεεεγγϕεε⎡=+±-+⎣=-5、广义胡克定律)]([1z y x x E σσμσε+-=)]([1x z y y E σσμσε+-=)]([1y x z z E σσμσε+-=G zxzx τγ=G yzyz τγ=,G xyxy τγ=6、应力圆与单元体之间的对应关系可总结为“点面对应、转向相同、夹角两倍。
”8.1 试画出下图8.1(a)所示简支梁A 点处的原始单元体。
图8.1[解](1)原始单元体要求其六个截面上的应力应已知或可利用公式直接计算,因此应选取如下三对平面:A 点左右侧的横截面,此对截面上的应力可直接计算得到;与梁xy 平面平行的一对平面,其中靠前的平面是自由表面,所以该对平面应力均为零。
再取A 点偏上和偏下的一对与xz 平行的平面。
截取出的单元体如图8.1(d)所示。
(2)分析单元体各面上的应力:A 点偏右横截面的正应力和切应力如图8.1(b)、(c)所示,将A 点的坐标x 、y 代入正应力和切应力公式得A 点单元体左右侧面的应力为:z M y I σ=bI QS z z*=τ由切应力互等定律知,单元体的上下面有切应力τ ;前后边面为自由表面,应力为零。
弹性力学平面应力平面应变问题 ppt课件

系,即 σx = Eεx 这就是虎克定律。 应力
(Hooke‘s Law)
Y
弹塑性范围
弹性范围
斜率, E
应变
工程上,一般将应变与应力间的关系表示为
xE 1xyz yE 1yzx
xy
1
G
xy
yz
1
G
yz
zE 1zxy
zx
1
G
zx
称它们为物理方程(广义虎克定律)。
x 1 E 1 1 2 x 1 y 1 z
1
0
对 1 0
称
1
2
对于平面应变问题的弹性矩阵,只须在上式
中,以 E
1 2
代E,
1
代μ即可。
小结
则有
uu vv ww (在 u 上)
用矩阵形式表示为:
uu (在 u 上)
小结
弹性力学基本方程的一般形式为
回顾
平衡微分方程 σb0 (在 内)
几何方程 物理方程
ε tu σDε
(在 内) (在 内)
边界条件
nσt
(在 t 上)
uu
(在 u 上)
其中 t u , 为弹性体的完整边界。
§2-3 平面应变和平面应力问题
平面应变问题
位移:按平面应变的定义,三个方向的位移函数是
uux,y vv(x,y) w0
应变:由几何方程应变-位移关系,得
x
u x
1x,
y,
y
v y
3x,
y,
xy yz
u y
v x
2x,
v w0 z y
y
z
w0, z
zx
u z
§2.3 平面应力状态的图解法

应力 方向截面的代表点在 平面上构成一条曲线,由分析可
应变 分析
知这条曲线是一个封闭的圆,称为该点的应力圆,也称莫尔
及应 圆。
力应
变关
系
讲
义
1
莫尔圆(应力圆)的画法
BRY
(1) 斜截面上应力 , 的符号规定
材 料
该点任意平行于 z 轴方向截面上的
力
正应力 ,以拉为“+”;
学 B
切应力 ,以使单元体有顺时针转动趋势为“+”。
料 为单位 1 的直角楔体微元。
力 学
Fnp 0:
r r
B
B 第
p dAcos r dAsin
2
( q dA) cos ( q dA)sin 0
q
p
A
p
np
章
p cos r sin q cos q sin r p
应力 应变 分析
p cos p sin q cos q sin
BRY
§2.3 平面应力状态的图解法
—— 应力圆(莫尔圆)
材
料
力 应力圆(莫尔圆)
学
B
建立直角坐标系 O ,水平轴为正应力 轴,铅垂轴为
第 切应力 轴。某点若为 xy 平面内的平面应力状态,以该点某
2 章
一平行于 z 轴方向斜截面上的正应力 和切应力 的数值为 坐标,可在 平面上得到一个代表点。所有平行于 z 轴
C(
x
y
,
0)
2
B E
P2
系
讲
D A P1 x
义
4
莫尔圆(应力圆)的作用
BRY
莫尔圆(应力圆)图直观地给出了平面应力状态下单元
材料力学:第八章-应力应变状态分析
正负符号规定:
切应力 t - 使微体沿顺时针 旋转为正 方位角 a - 以 x 轴为始边、逆时针旋转 为正
斜截面应力公式推导 设α斜截面面积为dA, 则eb侧面和bf 底面面积分别为dAcosα, dAsinα
由于tx 与 ty 数值相等,同时
sa+90 ,ta+90
E
sa+90 ,ta+90
结论: 所画圆确为所求应力圆
应力圆的绘制与应用3
应力圆的绘制
已知 sx , tx , sy ,
画相应应力圆
t
先确定D, E两点位置, 过此二点画圆即为应力圆
Ds x ,t x , E s y ,t y
t
C OE
s 2 , 0
s 1 , 0
应力圆绘制 作D, E连线中垂线,与x轴相交即为应力圆圆心
tb sb
t
sa
O
C
ta
D
sa ,ta
t
s
E
sb ,tb
O
D
sa ,ta
C
s
E
sb ,tb
由|DC|=|CE|,可得sC值:
sC
s
2 β
+
t
2 β
s
2 α
+
t
2 α
2 sα sβ
点、面对应关系
转向相同, 转角加倍 互垂截面, 对应同一直径两端
应变状态
构件内一点处沿所有方位的应变总况或集合, 称为该点处的 应变状态
研究方法
环绕研究点切取微体, 因微体边长趋于零, 微体趋于所研究 的点, 故通常通过微体, 研究一点处的应力与应变状态
第八章 应力应变状态分析

o
C
(σ x + σ y ) / 2
σ
半径为
Rσ = (
σ x −σ y
2
2 )2 + τ x
目录
应力圆(图解法) §8.3 应力圆(图解法)
二.应力圆的绘制与应用
σy σα τα σy τy
n
τ
σα τα
H(任意斜截面α) D(x截面对应)
τx
τx
t
-τ x
σx
α
2α
C
σx
τx=τy DF=EG
将第一式移项后两边平方与第二式两边平方相加
σ x +σ y
σ x −σ y
(σ α −
σ x +σ y
2
) =(
2
σ x −σ y
2
cos 2α − τ x sin 2α ) 2
τα = (
2
σ x −σ y
2
sin 2α + τ x cos 2α ) 2
目录
应力圆(图解法) §8.3 应力圆(图解法)
τ max σ x −σ y 2 2 = ±CK = ± ( ) +τ x τ min 2
所在截面互相垂直,并与正应力极值截面呈45 °夹角。
目录
§8.4 极值应力与主应力
二.主应力
由图可知,正应力极值所在截面的切应力为零。 ab,bc,cd,da 均为主平面。 微体的前、后 两面不受力, 切应力也为零。 主平面:切应力为零的截面。 主平面微体:三对互相垂直的主平面所构成的微体。
三.纯剪切状态的最大应力与圆轴扭转破坏分析
σ 3 = −τ
τ τ A(0,τ)
−45
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
O
P"' D" ε α 3 OP
γ xy dy cosα
dy sinα
γ sinα cosα
xy
ε α1 ε x cosα
2
ε α 2 ε y sinα
2
ε α 3 γ xy sinα cosα
根据叠加原理,x, y 和 xy 同时存在时,O点沿 x′方向
的线应变为
Lc
450
A
2 0
ε c ε y ε b ε 450
Lb
La
2
ε a ε x
y
c
45
0
b
3
1
b
εy
ε 450
εx
a
45
0
ε1
0
C D2 O
45
6
x
6
D1
0
1 OD1 370 10
450
A
2 0
3 OD2 175 10
2 0 24 ;
1PK1棋牌公社官网 编辑整理
1、推导线应变 从O点沿 x′方向取 出一微段 OP = dx′ , 并以它作为矩形 OAPB的对角线,该矩 形的两边长分别为 dx 和 dy 。
O
y
y'
B
P
x'
dy
α
x
A
dx OP dx' cosα dy sinα
dx
零,它们的横坐标分别代表两个
ε1
εy
D2
主应变 1 , 2 。
两个主应变方向间的夹角 等于90°, 即两方向互相垂直。 为1与x轴的夹角。
0
γ xy
2
A1
ε
A2
O
γ xy
2
D1
ε2 εx
γ 2
2α 0
两个主应变的表达式为
1
x y 2 2
x y xy 2 2
形 OAP" ' B"
O
BB" PP"' γ
xy
dy
OP 的伸长为:
P"' D" PP"' cosα
γ
xy
dy cosα
P"' D" PP"' cosα
γ
xy
y'
y B B" γ xy
α
x'
P P'" D" γ xy dy A dx x
dy cosα
dy OP sin
O点沿 x′ 方向的 线应变为:
2
x y
2
sin 2
xy
2
cos 2
二、 应变圆
(ε x ε y ) (ε x ε y ) γ xy cos 2α sin 2α εα 2 2 2
γ xy γ α (ε x ε y ) sin 2α cos 2α 2 2 2
与应力公式
y'
y
ε α 为O点沿 x′方向的线应变。
x'
γα
为直角 x 'oy ' 的改变量。
α
o
x
y'
y
假设
O点处沿任意方向的微段内, 应变是均匀的。
x'
α
o x
变形在线弹性范围内都是微小的, 叠加原理成立。
下面分别计算
x,
y ,xy , 单独存在时的线应变 和
剪应变 ,然后叠加得这些应变分量同时存在时的和 。
ε α ε α1 ε α 2 ε α 3
x
cos
y
2
y
sin
y
2
xy
sin cos
x
2
x
2
cos 2
xy
2
sin 2
2、推导剪应变 (略)
γ α (ε x ε y ) sin 2α γ xy cos 2α
或
2
2
(7-6-3)
主应变 1 与 x 轴间所夹角度 0 满足
xy tg 2 0 ( x y )
(7 6 4)
最大主应变 1 与 x 轴间所夹角度 记为1 ,最小主应变 1 与 x 轴间所夹角度 记为2 , 1与 2 间相差90°。
与主应力方向的确定相似,得到 (a)当εx>εy时,
ε
o
γ xy
2
D1
具体作法: 以D1(x, xy/2) D2(y, -xy/2)两点连线为直径 画应变圆
εx
γ 2
三、主应变的数值与方向
在平面应力状态下, 在此平面内一点处也存 在着两个互相垂直的主 应变,其相应的剪应变 等于零。
ε1
A1
ε
A2
o
γ xy
2
D1
ε2 εx
γ 2
2α 0
A1 和A2 两点的纵坐标等于
Lc
ε a ε x
2
La
y
45
0
b
C
c
εy
ε 450
εx
45
0
O1
a
x
45
0
450
B
Lb
A
ε c ε y ε b ε 450
(5) 作与 BA与 BC 两线的垂 直等分线, 相交于O1 点
Lc
2
ε a ε x
La
y
c
εy
45
0
b
C
ε 450
εx
45
0
O1
0
a
x
45
450
B
Lb
O点沿 x′方向的 线应变为
φα 2
O dx
A
x
P" D' ε y dy sinα ε α 2 OP dy sinα
ε y sinα
2
(3)只有正值剪应 变xy 存在(规定xy 使直角减小为正) 的 2 假设OA边不动 矩形OAPB变形后为菱
y'
y B B" γ xy
α
x'
P P'" D" γ xy dy A dx x
A
ε c ε y ε b ε 450
Lc
(6) 过与 O1 点作横坐标轴 轴, 并以 O1A(O1B 或O1C) 为半径 作圆, 即为应变圆。
2
ε a ε x
La
y
c
εy
45
0
b
3
1
ε 450
εx
பைடு நூலகம்45
0
a
x
C
D2
O1
45
0
D1
应变圆与 轴的交点D1, D2的 横坐标, 即为主应变的数值。
Q
BB' PP" ε y dy
矩形OAPB变形后
φα 2
O dx
A
x
为 OAP"B'
OP 的伸长量为 P" D' PP"sinα
ε y dy sinα
P" D' PP"sinα
ε y dy sinα
y'
ε y dy
y B' D' B
α 2
P" P dy
α
x'
Q
dy OP sin
x y
2 x y 2
x y
2
cos 2 x sin 2
相比
sin 2 x cos 2
以线应变 作为横坐标, 而将
(-/2) 作为纵坐标 , 便可绘出表 示平面应力状态下一点处不同 方向的应变变化规律(一点处 的应变状态)的应变圆
εy
D2
γ xy
2
(1)只有正值 x 存在 y' 的 1
假设OB边不动。 矩形 OAPB 变形后 成为 OA’P’B 。
y B
α
x'
P D P' dy A' x
O
AA' PP' ε x dx
A dx
ε x dx
OP 的伸长量 P' D 为 P' D PP'cosα
ε x dx cosα
y'
由线应变的定义可得O点
ε c ε y ε b ε 450
Lc
Lb
La
0 12
2
ε a ε x
的三个线应变值为x= 345×10-6, 45° =
y = -149 ×10-6 。试用应变圆求该点处的主应变数值和方向。
y
45
0
b
45
0
c
εy
ε 450
εx
a
x
y
c
εy
45
0
x = 345×10-6
b
45
0
45° = 208 ×10-6
y = -149 ×10-6
ε 450
εx
a
x
Lc
Lc
450
B
Lb
A
(3) 过 Lb 线上的任一点B, 作与 Lb成45°角(顺时针转向)的BA 线, 交La 线于A点 ;