开关电源环路补偿
开关电源环路补偿概述
其中 f =
1 , Re 为等效电阻, C e 为等效电容。 2πRe C e
上式分子中对应的频率 fZ 为零点频率,分母中对应的频率 fP 为极点频率,f0 称为初始极点频率。
-2-
一个零点会在其零点频率处将斜率增加+1(20dB) 。零点会引起相位超前,由 fZ 处的零点, 引起在频率 f 处超前的相位是 θ ld = arctan f 。如下图示。 fZ
1 + j 2πfR2 C1 j 2πfR1 (C1 + C 2 )(1 + j 2πfR2 C1C 2 ) C1 + C 2
∠D ( f ) ⋅ 180 o π 幅频特性如右图上,相频特性如右图下。 θ1 ( f ) =
-7-
补偿后系统总开环传递函数如下 TV ( f ) = D( f )G ( f ) 幅频及相频特性曲线如右图。 从右边的曲线中,我们可以计算 出电压环的穿越频率: f C = 1.944 × 10 4 然后还可以计算出电压环的相位 裕量: θ 2 (1.944 × 10 4 ) + 180 = 66.427
斜率-1
斜率+1 斜率 0
fZ
fZ
斜率 0
一个极点会在其极点频率处将斜率增加-1(-20dB) 。极点会引起相位滞后,由 fP 处的极点, 引起在频率 f 处滞后的相位是 θ lag = arctan f 。如下图示。 fP fP
斜率+1 斜率 0
斜率 0
fP
斜率-1
四.常用补偿器分析 下面是 TypeII 型补偿器的电路原理图
-8-
dB
Hz 1 f2 = = 1 × 10 5 。 C1C 2 2πR2 C1 + C 2 计算实际的电阻电容参数: Rbias = 1 × 10 3 ,则 R1 = VO − VREF Rbias = 1.64 × 10 3 VREF 0o − 30o
TL431环路补偿计算(实例,简单可行)

反馈环路分析
用3842设计的反激式开关电源,输入交流 85 ~ 265V ,输出12V / 5A ,开关频率100kHz ,
电流采样电阻为 0.33,
1000F / 25V ,变换器初级绕组40T,电感
量370H ,次级绕组5T ,局部电路如下图,计算补偿网络元件参数。
G(s)
(1
sRcCo )(1 s / 2fRHP 1 s / 2f p
)
H (s) (1 sR2C2 ) sR1C2 (sR2C1 1)
f p0
1 2R1C2
f z1
1 2R2C2
f p1
1 2R2C1
算例
ESR 30m
f esr
2
1 ESR Co
5.3kHz
f RHP
R 2 LD
35kHz
fp
1 D 2RCo
R2
R2 144.8k
f p1
1 2R2C1
1k
2
1 144.8 C1
C1 1.1nF
G (s)@ fcross
tan1( 1 ) tan1( 1 ) tan1( 1 )
5.3
0.033
35
10.7 71.7 1.6 62.6
H (s)@ fcross
90 tan1( 1 ) tan1(1)
f z1
1 2R2C2
f p1
1 2R2C1
增益 (dB)
20 log(19.9)
fp a
f cross
f z1
f p1
a
f esr
G(s) H (s)
G(s)H (s)
f p0
频率
(对数坐标)
buck电流环路补偿方式导致时间不变的

buck电流环路补偿方式导致时间不变的我们来了解一下什么是buck电流环路补偿方式。
Buck电路是一种降压型的开关电源,它通过控制开关管的导通时间和截止时间来调节输出电压。
而电流环路补偿方式是一种用于提高系统稳定性和响应速度的控制技术。
它通过对电流环路进行补偿,使得系统在电流变化时能够快速稳定地达到设定值。
在buck电流环路补偿方式中,通过对电流环路进行补偿,可以有效地减小电流环路的不稳定性和响应时间,从而提高系统的稳定性和响应速度。
这种补偿方式主要通过增加一定的相位裕度和增益裕度来实现。
具体来说,buck电流环路补偿方式主要包括两个方面的补偿:零极点补偿和增益裕度补偿。
零极点补偿主要是通过在控制环路中增加一个或多个零点和极点来改变控制环路的传递函数,从而提高系统的稳定性和响应速度。
而增益裕度补偿则是通过增大控制环路的增益裕度,使得系统能够在电流变化时更快地达到设定值。
那么为什么buck电流环路补偿方式会导致时间不变呢?这是因为在buck电流环路补偿方式中,通过增加零极点和增益裕度,可以使得系统的稳定性和响应速度得到提高。
而稳定性和响应速度是衡量系统性能的重要指标之一,它们与时间密切相关。
因此,在buck 电流环路补偿方式下,尽管系统的稳定性和响应速度得到了提高,但时间却保持不变。
总结起来,buck电流环路补偿方式是一种通过增加零极点和增益裕度来提高系统稳定性和响应速度的控制技术。
尽管在这种补偿方式下系统的稳定性和响应速度得到了提高,但时间却保持不变。
这是因为稳定性和响应速度与时间密切相关,通过增加零极点和增益裕度可以改善这些指标,但时间本身并不会受到影响。
希望通过本文的介绍,读者对buck电流环路补偿方式以及其导致时间不变的原因有了更加清晰的了解。
这种补偿方式在实际应用中具有重要的意义,可以有效地提高系统的性能和稳定性。
未来的研究中,我们还可以进一步探索buck电流环路补偿方式的优化方法,以进一步提高系统的性能和稳定性。
开关电源环路补偿设计
开关电源环路补偿设计开关电源环路补偿设计在开关电源设计中,环路补偿是至关重要的一步。
环路补偿的正确设计可以提高电源的稳定性和效率,从而提供更为可靠的电源输出。
本文将针对开关电源的环路补偿设计,从三个方面进行阐述。
一、开关电源环路补偿的基本原理开关电源的环路补偿,是指将部分输出信号回馈到反馈端口,通过正反馈作用来改善系统的动态性能。
补偿的目的,是使电源输出稳定,对负载的响应性更好。
为了实现这一目的,设计师需要对开关电源的基本原理有深入的理解。
在开关电源中,电容、电感和频率之间的相互影响是至关重要的。
通过合理的组合设计,可以提高电源的效率,降低功耗。
二、开关电源环路补偿的设计方法开关电源的环路补偿设计方法,需要综合考虑多个参数,如响应时间、阻尼稳定性、相位裕度等。
其中,响应时间涉及到电路响应时间、电源传输函数以及负载条件,需要根据具体情况予以调整。
阻尼稳定性关系到系统的稳态稳定性,需要根据不同负载条件下的阻尼因素予以设计。
相位裕度涉及到极点间距,可以通过更改反馈回路的增益稳定性来达到较好的效果。
三、开关电源环路补偿的优化在实际电路中,由于电容、电感和负载等多种因素的影响,开关电源环路补偿存在一定的误差。
优化环路补偿,可以通过在电路中加入滤波电容、降低负载电感等措施,提高电源输出的稳定性。
此外,在滤波器的选型方面,选择与系统肖特基二极管参数相匹配的器件,可以较为有效地降低噪声和振荡。
总之,开关电源环路补偿对整个系统的性能至关重要。
一个合理的补偿设计将使电源输出变得更加稳定、高效,具有更好的响应性。
因此,在开发开关电源的过程中,我们应该时刻保持对环路补偿原理的理解,并综合考虑各种参数和因素,以达到最优的设计效果。
反激式开关电源的环路补偿设计与应用

反激式开关电源的环路补偿设计与应用摘要反激式开关电源工作的稳定性与其反馈环路有很大的关系,若反馈环路系统没有足够的幅值、相位裕度,开关电源工作将会不稳定且出现输出振荡。
文章基于TNY278芯片开关电源的环路补偿设计为例,详细分析了其环路补偿电路,根据分析验证,总结出该方法不仅能有效控制整个环路的稳定性而且可以降低输出振荡,满足设计要求。
关键字反激式开关电源相位裕度幅值裕度环路补偿穿越频率Design and application of loop compensation for flyback switching power supplyYE Zhenxiong XU Wenyi CHENYouzhang MAZhengxian(TCL air conditioner (Zhongshan) Co., Ltd Zhongshan,Guangdong 528427)Abstract The stability of flyback switching power supply is closely related to its feedback loop. If the feedback loop system does not have enough amplitude and phase margin, the switching power supply will be unstable and output oscillation will occur. Based on theTNY278 chip switching power supply loop compensation design as an example, detailed analysis of the loop compensation circuit, according to the analysis and verification, summed up the method can not only effectively control the stability of the whole loop, but also reduce the output oscillation, meet the design.Keywords Flyback switching power supply Phase margin Amplitude margin Loop compensation Crossing frequency引言随着半导体行业的发展,开关电源的应用场合不断拓宽。
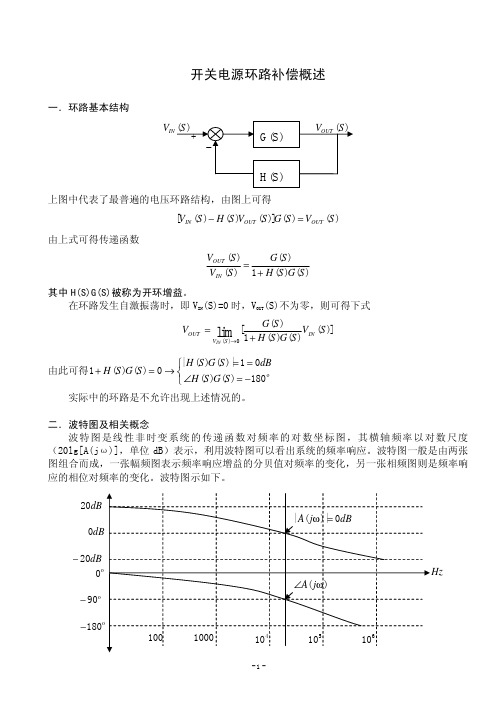
开关电源环路补偿概述
开关电源环路补偿概述开关电源环路补偿是一种通过在开关电源回路中引入补偿元件,来提高开关电源输出性能的技术手段。
它的目标是通过合理设计和安排补偿电路,减小开关电源输出电压的波动、提高输出电流稳定性,从而满足电源对电压和电流稳定性的要求,降低系统的噪声,提高系统的可靠性和稳定性。
首先,反馈电路是开关电源中最基本的补偿措施。
它通过对输出电压或输出电流进行采样,并与期望值进行比较得到误差信号,再经过比例放大、积分等处理,通过对控制信号进行调整,实现对输出电压和电流的精确控制。
其次,补偿元件的作用是对开关电源中的非线性元件进行补偿。
例如,开关管的开关过程会引起电压和电流的突变,补偿元件可以通过电容、电感等元件对这些突变进行分解和平滑处理。
同时,补偿元件还可以对开关电源中的功率因素进行补偿,提高电源的功率因数。
最后,滤波元件的作用是对开关电源的输出信号进行滤波处理,消除高频噪声和干扰,使得输出信号更加平稳和稳定。
总体来说,开关电源环路补偿技术可以提高开关电源的稳定性和可靠性,降低噪声和干扰,满足电源对电压和电流稳定性的要求。
在实际应用中,需要根据具体的开关电源工作条件和要求,选择合适的补偿措施和元件,并进行合理的设计和优化。
同时,还需要考虑补偿元件的稳定性、成本和占用空间等因素,使得补偿方案具有实用性和经济性。
开关电源环路补偿技术在电源领域有着广泛的应用。
它可以应用于各种类型的开关电源中,例如交流-直流开关电源、直流-直流开关电源以及交流-交流开关电源等。
同时,它还可以适用于不同的电源输出要求,包括电压型和电流型等。
在一些特殊应用中,例如高精度仪器设备、通信设备、医疗设备等,对电源输出稳定性和噪声要求非常高的场合,开关电源环路补偿技术更是不可或缺的。
总结起来,开关电源环路补偿技术能够通过合理的补偿措施和元件设计,提高开关电源的输出性能,使得其在输入电压和负载变化时能够稳定输出所需的电压和电流。
它有着广泛的应用前景,可以提高电源系统的可靠性和稳定性,降低系统噪声和干扰,满足各种应用领域的需求。
一种buck-boost开关电源环路补偿电路设计
一种buck-boost开关电源环路补偿电路设计
设计一种buck-boost开关电源环路补偿电路的步骤如下:
1. 确定需要补偿的电源环路特性:首先,需要确定要补偿的电源环路具有哪些频率成分的干扰或噪音。
例如,可以通过频谱分析确定这些频率成分的频率范围和幅度。
2. 设计补偿网络:根据第一步的分析结果,设计一个合适的补偿网络来抵消电源环路的干扰或噪音。
补偿网络通常包括电容、电感和阻抗器等元件,可以选择串联或并联配置以实现所需的补偿效果。
3. 选择补偿元件参数:根据补偿网络的设计,选择合适的元件参数,如电容值、电感值和阻抗器阻值等。
可以通过仿真或实验来优化参数选择,并确保所选元件能够在所需频率范围内提供所需的补偿效果。
4. 布局和连接补偿电路:根据设计,将补偿网络的元件布局在电源环路中,并通过适当的连接方式将其与开关电源环路连接。
确保补偿网络能够有效地接收和处理来自电源环路的干扰或噪音,并将补偿信号输出到开关电源环路中。
5. 验证和调整:在连接完补偿电路后,进行验证和调整以确保补偿效果符合预期。
可以使用示波器、频谱仪等仪器来观察和测量电源环路的干扰或噪音幅度,并通过调整补偿网络的参数来优化补偿效果。
需要注意的是,设计补偿电路时需要考虑电路的稳定性和安全性,确保补偿网络不会引入额外的噪音或干扰,并且不会对开关电源环路的性能产生负面影响。
同时,还需遵守相关的电气标准和规范,以确保设计符合相关要求。
开关电源环路补偿概述
开关电源环路补偿概述开关电源环路补偿是一种电子电路设计技术,用于提高开关电源的负载能力、精度和稳定性。
随着电子设备的不断发展,开关电源已经成为广泛使用的电源类型,应用于各种领域,如计算机、通信、工业控制、汽车电子等。
然而,开关电源在输出电流波形、输出电压稳定性以及负载适应能力上存在一些问题,通过使用环路补偿技术可以有效解决这些问题,提高开关电源的性能。
首先,我们来了解一下开关电源的基本工作原理。
开关电源主要由开关器件、变压器、整流滤波电路和控制电路组成。
输入电压经过整流滤波电路和开关器件的切换,最终输出变压器的二次侧,形成输出电压。
控制电路通过监测输出电压并调整开关器件的工作状态,来稳定输出电压。
然而,开关电源存在输出电流波形不理想、输出电压精度不高以及负载变化响应较慢等问题,这些问题可以通过环路补偿技术来解决。
在开关电源中,输出电流波形的不理想会导致输出电压的纹波增大,给其他电路造成干扰。
环路补偿技术可以通过对开关电源的控制电路进行补偿,使输出电流波形接近理想的直流信号。
具体来说,环路补偿技术包括两个主要方面,一个是在控制回路中引入一个外部补偿网络,另一个是在采样过程中加入一个额外的测量回路。
在控制回路中引入外部补偿网络可以改变系统的传递函数,从而减小输出电流的纹波。
补偿网络一般包括串联电感和并联电容,通过调整它们的数值可以改变控制环节的频率响应,从而达到减小输出电流纹波的目的。
此外,还可以通过控制补偿网络中的电感、电容的数值和连接方式,对系统的相位特性进行调整,以进一步提高系统的稳定性和攻角余量。
在采样过程中加入额外的测量回路可以提供准确的输出电流信息,从而使控制电路更好地调整开关器件的工作状态,进一步提高输出电压的精度和稳定性。
具体来说,额外的测量回路可以通过采样电阻、电流传感器或者其他测量设备获取输出电流信息,并反馈给控制电路,以校正开关器件的工作状态。
通过不断调整开关器件的工作状态,可以使输出电压尽量接近设定值,提高开关电源的稳定性和精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
今天
作为工程师,每天接触的是电源的设计工程师,发现不管是电源的老手,高手,新手,几乎对控制环路的设计一筹莫展,基本上靠实验.靠实验当然是可以的,但出问题时往往无从下手,在这里我想以反激电源为例子(在所有拓扑中环路是最难的,由于RHZ 的存在),大概说一下怎么计算,至少使大家在有问题时能从理论上分析出解决问题的思路.
示意图:
这里给出了右半平面零点的原理表示,这对用PSPICE 做仿真很有用,可以直接套用此图.
递函数自己写吧,正好锻炼一下,把输出电压除以输入电压就是传递函数.
bode 图可以简单的判定电路的稳定性,甚至可以确定电路的闭环响应,就向我下面的图中表示的.零,极点说明了增益和相位的变化
二:
单极点补偿,适用于电流型控制和工作在DCM 方式并且滤波电容的ESR 零点频率较低的
电源.其主要作用原理是把控制带宽拉低,在功率部分或加有其他补偿的部分的相位达到180 度以前使其增益降到0dB. 也叫主极点补偿.
双极点,单零点补偿,适用于功率部分只有一个极点的补偿.如:所有电流型控制和非连续方式电压型控制.
三极点,双零点补偿.适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑。
C1 的主要作用是和R2 提升相位的.当然提高了低频增益.在保证稳定的情况下是越小越好.
C2 增加了一个高频极点,降低开关躁声干扰.
串聯C1 實質是增加一個零點,零點的作用是減小峰值時間,使系統響應加快,并且閉環越接近虛軸,這种效果越好.所以理論上講,C1 是越大越好.但要考慮,超調量和調節時間,因為零點越距离虛軸越近,閉環零點修正系數Q 越大,而Q 與超調量和調節時間成正比,所以又不能大.總之,考慮閉環零點要折衷考慮.
并聯C2 實質是增加一個及點,級點的作用是增大峰值時間,使系統響應變慢.所以理論上講,C2也是越大越好.但要考慮到,當零級點彼此接近時,系統響應速度相互抵消.從這一點就可以說明,我們要及時響應的系統C1 大,至少比C2 大
三:环路稳定的标准.
只要在增益为1 时(0dB)整个环路的相移小于360 度,环路就是稳定的.
但如果相移接近360 度,会产生两个问题:1)相移可能因为温度,负载及分布参数的变化而达到360 度而产生震荡;2)接近360 度,电源的阶跃响应(瞬时加减载)表现为强烈震荡,使输出达到稳定的时间加长,超调量增加.如下图所示具体关系.
所以环路要留一定的相位裕量,如图Q=1时输出是表现最好的,所以相位裕量的最佳值为52度左右,工程上一般取45度以上.如下图所示:
这里要注意一点,就是补偿放大器工作在负反馈状态,本身就有180度相移,所以留给功率部分和补偿网络的只有180度.幅值裕度不管用上面哪种补偿方式都是自动满足的,所以设计时一般不用特别考虑.由于增益曲线为-20dB/decade时,此曲线引起的最大相移为90度,尚有90度裕量,所以一般最后合成的整个增益曲线应该为-20dB/decade部分穿过0dB.在低于0dB带宽后,曲线最好为-40dB/decade,这样增益会迅速上升,低频部分增益很高,使电源输出的直流部分误差非常小,既电源有很好的负载和线路调整率.
四,如何设计控制环路?
经常主电路是根据应用要求设计的,设计时一般不会提前考虑控制环路的设计.我们的前提就
是假设主功率部分已经全部设计完成,然后来探讨环路设计.环路设计一般由下面几过程组成:
1)画出已知部分的频响曲线.
2)根据实际要求和各限制条件确定带宽频率,既增益曲线的0dB频率.
3)根据步骤2)确定的带宽频率决定补偿放大器的类型和各频率点.使带宽处的曲线斜率为20dB/decade,画出整个电路的频响曲线.
上述过程也可利用相关软件来设计:如pspice,POWER-4-5-6.一些解释:
已知
部分的频响曲线是指除Kea(补偿放大器)外的所有部分的乘积,在波得图上是相加.
环路带宽当然希望越高越好,但受到几方面的限制:a)香农采样定理决定了不可能大于
1/2Fs;b)右半平面零点(RHZ)的影响,RHZ随输入电压,负载,电感量大小而变化,几乎无法补偿,我们只有把带宽设计的远离它,一般取其1/4-1/5;c)补偿放大器的带宽不是无穷大,当把环路带宽设的很高时会受到补偿放大器无法提供增益的限制,及电容零点受温度影响等.所以一般实际带宽取开关频率的1/6-1/10
五,反激设计实例
条件:输入85-265V交流,整流后直流100-375V输出12V/5A
初级电感量370uH初级匝数:40T,次级:5T
次级滤波电容1000uFX3=3000uF震荡三角波幅度.2.5V开关频率100K
电流型控制时,取样电阻取0.33欧姆
下面分电压型和峰值电流型控制来设计此电源环路.所有设计取样点在输出小LC前面.如果取样点在小LC后面,由于受LC谐振频率限制,带宽不能很高.1)电流型控制
假设用3842,传递函数如下
此图为补偿放大部分原理图.RHZ的频率为33K,为了避免其引起过多的相移,一般取带宽为其频率的1/4-1/5,我们取1/4为8K.
分两种情况:
A)输出电容ESR较大
输出滤波电容的内阻比较大,自身阻容形成的零点比较低,这样在8K处的相位滞后比较小.Phanseangle=arctan(8/1.225)-arctan(8/0.033)-arctan(8/33)=--22度.
另外可看到在8K处增益曲线为水平,所以可以直接用单极点补偿,这样可满足-20dB/decade的曲线形状.省掉补偿部分的R2,C1.
设Rb为5.1K,则R1=[(12-2.5)/2.5]*Rb=19.4K.
8K处功率部分的增益为-20*log(1225/33)+20*log19.4=-5.7dB因为带宽8K,即8K处0dB
所以8K处补偿放大器增益应为5.7dB,5.7-20*log(Fo/8)=0Fo为补偿放大器0dB增益频率Fo=1/(2*pi*R1C2)=15.42
C2=1/(2*pi*R1*15.42)=1/(2*3.14*19.4*15.42)=0.53nF相位裕度:180-22-90=68度
输出滤波电容的内阻比较大,自身阻容形成的零点比较高,这样在8K处的相位滞后比较大. Phanseangle=arctan(8/5.3)-arctan(8/0.033)-arctan(8/33)=-47度.
如果还用单极点补偿,则带宽处相位裕量为180-90-47=43度.偏小.用2型补偿来提升.
三个点的选取,第一个极点在原点,第一的零点一般取在带宽的1/5左右,这样在带宽处提升
相位78度左右,此零点越低,相位提升越明显,但太低了就降低了低频增益,使输出调整率降低,此处我们取1.6K.第二个极点的选取一般是用来抵消ESR零点或RHZ零点引起的增益升高,保证增益裕度.我们用它来抵消ESR零点,使带宽处保持-20db/10decade的形状,我们取ESR零点频率5.3K
数值计算:
8K处功率部分的增益为-20*log(5300/33)+20*log19.4=-18dB
因为带宽8K,即最后合成增益曲线8K处0dB
所以8K处补偿放大器增益应为18dB,5.3K处增益=18+20log(8/5.3)=21.6dB水平部分增益=20logR2/R1=21.6
推出R2=12*R1=233Kfp2=1/2*pi*R2C2
推出C2=1/(2*3.14*233K*5.4K)=127pF.fz1=1/2*pi*R2C1
推出C1=1/(2*3.14*233K*1.6K)=0.427nF.
相位
fo为LC谐振频率,注意Q值并不是用的计算值,而是经验值,因为计算的Q无法考虑LC串联回路的损耗(相当于电阻),包括电容ESR,二极管等效内阻,漏感和绕组电阻及趋附效应等.在实际电路中Q值几乎不可能大于4—5.
由于输出有LC谐振,在谐振点相位变动很剧烈,会很快接近180度,所以需要用3型补偿放大器来提升相位.其零,极点放置原则是这样的,在原点有一极点来提升低频增益,在双极点处放置两个零点,这样在谐振点的相位为-90+(-90)+45+45=-90.在输出电容的ESR处放一极点,来抵消ESR的影响,在RHZ处放一极点来抵消RHZ引起的高频增益上升.
元件数值计算,为方便我们把3型补偿的图在重画一下.
兰色为功率部分,绿色为补偿部分,红色为整个开环增益.
如果相位裕量不够时,可适当把两个零点位置提前,也可把第一可极点位置放后一点.
同样假设光耦CTR=1,如果用CTR大的光耦,或加有其他放大时,如同时用IC的内部运放,只需要在波得图上加一个直流增益后,再设计补偿部分即可.这时要求把IC内部运放配置为比
例放大器,如果再在内部运放加补偿,就稍微麻烦一点,在图上再加一条补偿线结束. 我想大家看完后即使不会计算,出问题时也应该知道改哪里.。