关节臂式柔性坐标测量机测量空间分析
关节臂测量机工作原理

关节臂测量机工作原理
关节臂测量机是一种用于测量物体位置和方向的机器人设备。
它通常由一个机械臂和一套传感器组成。
工作原理如下:
1. 目标识别:关节臂测量机首先需要通过视觉或其他传感器来识别目标物体。
这可以通过摄像头、激光传感器或其他感知设备实现。
2. 姿态估计:一旦目标物体被识别,关节臂测量机需要根据目标物体的位置和方向来估计其姿态。
这可以通过计算物体的旋转角度和位置来实现。
3. 关节控制:根据目标物体的姿态估计,关节臂测量机会计算出每个关节的运动和位置。
它会使用驱动器或电机来控制关节的旋转,以将测量设备定位到正确的位置。
4. 测量数据记录:一旦关节臂测量机定位到正确的位置,它会使用内置的传感器来测量目标物体的位置、形状或其他特性。
这些传感器可以是激光测距仪、相机或其他测量设备。
关节臂测量机的工作原理可以根据具体的设备和应用而有所差异,但通常包括目标识别、姿态估计、关节控制和测量数据记录等步骤。
这些步骤使得关节臂测量机能够准确地测量目标物体的位置和方向,广泛用于工业生产、科学研究和其他领域。
关节式测量臂的误差源分析

摘要关节式测量臂的结构参数误差是影响其测量精度的最主要因素,各关节的结构参数误差对测量机精度的影响差异很大,并且这些结构参数误差造成的测量误差随着测量机位姿的变化而变化。
本课题建立了关节式测量臂机器人的坐标系统及位姿误差模型,设计了基于MATLAB的误差仿真软件,根据误差仿真结果绘制了关节空间的误差分布图,分析了测量臂各关节结构参数及测量臂位姿对其测量精度的影响,便于关节式测量臂的合理地使用,研究结果为关节式测量臂的误差补偿提供了依据。
关键词:关节式测量臂;误差分析;位姿;MATLAB仿真ABSTRACTThe kinematics parameter errors of the articulated measuring arm are the most important factors that affect its measuring accuracy, the kinematics parameter errors of different joints can cause different measuring errors, and the measuring errors are changing as the articulated measuring arm pose varies. The position and orientation error model of the articulated measuring arm has been built, and an error analysis program based on MATLAB has been developed. The error distribution map has been plotted, the effects of the structural parameters and poses of the articulated measuring arm on the measuring accuracy has been analyzed. The research result provides a basic reference for the error compensation of robots.Key words: articulated measuring arm; error analysis; position and orientation;MATLAB simulation目录第一章绪论 (1)1.1引言 (1)1.2关节式测量臂的误差源 (1)1.3影响关节式测量臂位姿精度的主要因素 (3)1.4本文研究内容 (4)第二章六自由度关节式测量臂运动分析 (5)2.1运动学分析概述 (5)2.1.1坐标变换 (6)2.1.2齐次变换 (8)2.2关节式测量臂D-H模型建立 (8)2.2.1D-H模型建立的方法 (8)2.2.2关节式测量臂的D-H矩阵模型 (9)2.3本章小结 (12)第三章基于MA TLAB的关节式测量臂误差分析 (13)3.1 MATLAB简介 (13)3.2 误差分析界面设计 (13)3.3结构参数误差仿真分析 (17)3.3.1关节转角误差θ对测量臂精度的影响分析 (18)3.3.2关节扭转角误差α对测量臂精度的影响分析 (21)3.3.3杆长误差d对测量臂精度的影响分析 (25)3.3.4关节长度误差a对测量臂精度的影响分析 (27)3.3.5提高测量臂精度的措施 (30)3.4本章小结 (31)第四章总结与展望 (32)参考文献 (33)附录 (34)附录1 (34)附录2 (41)谢辞.......................................................................................................... 错误!未定义书签。
关节臂三坐标测量仪使用方法
关节臂三坐标测量仪使用方法1. 简介关节臂三坐标测量仪是一种用于测量物体三维空间位置和姿态的精密测量设备。
它采用关节臂结构,能够灵活自由地移动和旋转,具有高精度和高稳定性,广泛应用于工业制造、机械加工、航空航天等领域。
本文将详细介绍关节臂三坐标测量仪的使用方法,包括设备准备、操作步骤、数据处理等内容,帮助用户快速上手并正确地使用该设备。
2. 设备准备在开始使用关节臂三坐标测量仪之前,需要进行以下准备工作:2.1 检查设备完整性检查设备是否完整,并确保所有零部件齐全。
包括主机、控制器、触发器、传感器等。
2.2 连接电源与通信线路将主机与电源连接,并确保电源正常工作。
同时,根据需要连接通信线路,以实现与计算机或其他外部设备的数据传输。
2.3 安装校准板校准板是关节臂三坐标测量仪的重要配件,用于校准设备的测量精度。
将校准板固定在测量区域内的合适位置,并确保其表面平整、无损坏。
2.4 调整设备位置根据实际需求,调整关节臂三坐标测量仪的位置和方向,使其能够覆盖待测物体的整个空间范围。
3. 操作步骤关节臂三坐标测量仪的操作步骤如下:3.1 打开软件在计算机上打开关节臂三坐标测量仪的控制软件,并确保与设备正常连接。
3.2 标定设备在进行实际测量之前,需要对关节臂三坐标测量仪进行标定。
按照软件提示,依次进行零点标定、轴向标定和角度标定等步骤,以确保设备的测量精度和准确性。
3.3 设置测量参数根据待测物体的特点和需求,设置合适的测量参数。
包括采样频率、数据存储方式、坐标系选择等。
3.4 放置待测物体将待测物体放置在关节臂三坐标测量仪的测量区域内,并调整其位置和姿态,使其符合测量要求。
3.5 进行测量点击软件界面上的“开始测量”按钮,关节臂三坐标测量仪将自动进行测量。
在此过程中,设备会通过传感器采集物体的位置和姿态信息,并实时显示在软件界面上。
3.6 数据处理与分析测量完成后,可以对采集到的数据进行处理和分析。
常见的处理方式包括数据平滑、滤波、坐标转换等。
关节臂式坐标测量机参数标定方法

关节臂式坐标测量机参数标定方法王学影;王华;陆艺;张培培【摘要】采用对称点法对关节臂式坐标测量机的各参数进行标定.该标定方法把各参数分离,使标定过程更简单.首先,在D-H参数建模法的基础上,利用基于准球坐标系的建模方法,建立了关节臂式坐标测量机的数学模型,使关节间各个参数正交,进而推导了运动学方程.借助设计的固紧装置,在ROMER Infinite 2.0型关节臂式坐标测量机上运用该方法进行了标定实验,得出了坐标测量机的结构参数,验证了参数标定方法的可行性和实验结果的准确性,为进一步提高关节臂式坐标测量机的测量精度奠定了基础.【期刊名称】《农业机械学报》【年(卷),期】2016(047)006【总页数】5页(P408-412)【关键词】关节臂式坐标测量机;参数标定;对称点法【作者】王学影;王华;陆艺;张培培【作者单位】中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018【正文语种】中文【中图分类】TH721关节臂式坐标测量机作为—种便携的测量仪器在工业生产中的应用越来越广泛[1-2]。
关节臂式坐标测量机参数的标定,直接影响着测量精度,从而影响到整个工业的生产过程[3-5]。
目前国外对关节臂式坐标测量机在参数标定方面的研究较多且深入。
KOVAC等[6]设计了—种专用量具结合商业化软件对关节臂式坐标测量机进行标定;FURUTANI等[7]利用装有多个标准球的金属板对关节臂式坐标测量机进行标定;SANTOLARIA等[8]使用拥有14个球的球形量规,建立基于傅里叶多项式的误差模型对关节臂式坐标测量机的参数误差进行了估计辨识;ACERO等[9]利用激光跟踪仪进行实验。
国内对参数标定这方面的研究相对较少。
主要方法有根据高精度正交三坐标测量机提供的标准,运用最小二乘参数辨识法对关节臂式坐标测量机进行标定[10];使用单点锥窝,运用模拟退火算法实现关节臂式坐标测量机的参数辨识[11];基于遗传算法对关节臂式坐标测量机的标定[12]。
关节臂坐标机示值校准不确定度分析

关节臂坐标机示值校准不确定度分析作者:石韡蒋加平徐光洁来源:《中国新技术新产品》2019年第18期摘 ;要:JJF 1408—2013《关节臂式坐标测量机校准规范》仅给出了用标准球杆校准关节臂坐标机空间长度示值误差的方法。
该文将提出用3等量块校准关节臂坐标机空间长度示值误差的方法,并分析其不确定度,确定该方法的有效性。
确定此方法在校准实验室应用的科学性和可行性。
对于测量范围较小的关节臂测量机的空间尺寸的校准,使用量块进行校准尤为经济可行。
关键词:关节臂;量块;校准;方法;不确定度中图分类号:TB921 ; ; ; ; ; ; 文献标志码:A关节臂式坐标测量机也称便携式三维测量臂、曲臂式坐标测量机。
由于其便携性,广泛应用于汽车零配件、模具、钣金件、塑料制品、汽车整车等现场测量和检测。
作为测量器具,其示值校准显得尤为重要。
JJF 1408—2013颁布之前,部分校准机构就参照JJF 1064—2010《坐标测量机校准规范》用量块对关节臂测量机的空间尺寸示值进行校准。
JJF 1408—2013颁布之后,采用标准球杆对其空间尺寸示值进行校准的方法受到各校準机构的普遍重视。
但是由于标准球杆的制造工艺不成熟,国产厂家少,购置费用较高,很难得到普遍采用和推广。
1 测量任务及目标不确定度1.1 测量任务用900 mm三等量块校准测量臂空间测量直径1.2 mm,空间长度最大允许误差±0.025 mm 的关节臂坐标机的空间长度示值误差,并给出扩展不确定度。
1.2 测量任务目标不确定度U2 测量方法选用2块量块,短量块的长度为关节臂测量半径的50%~70%,长量块的长度为关节臂测量半径的120%~150%。
量块的摆放姿态为水平、垂直及45°。
每一个位置独立重复测量3次,同时用温度传感器对量块的温度进行实时测量,并计算量块的线膨胀值。
仪器测得值减去量块证书实测值和线膨胀值之和为示值误差,取3次测量结果中示值误差最大值为校准结果。
关节臂式坐标测量机空间误差建模

犕犲犪狊狌狉犲犿犲狀狋犛狆犪犮犲犈狉狉狅狉犕狅犱犲犾犻狀犵狅犳犃犃犆犕犕
Lu Yi,ZhangPeipei, Wang Hua, WangXueying,ZhaoChenxin
(CollegeofMetrology & MeasurementEngineering,ChinaJiliangUniversity,Hangzhou 310018,China) 犃犫狊狋狉犪犮狋:TheerrorsourcesofAACMM weremanyandcomplex,andthemeasurementspaceerrorwasuncertain.Inordertoobtain themeasurementspaceerrorofAACMMaccurately,thestandardconewasmeasuredonAACMM,andalsoobtainthetrainingdatasample andtestdatasample,theAACMM’smeasurementspaceerrormodelwasbuiltupbyBPneuralnetwork,andtheparticleswarmoptimiza tionalgorithm (PSO)wasintroducedtooptimizetheconvergencespeedandtheoperationspeedofBPneuralnetwork,andthepredictionand verificationofthemodelwascarriedout.ResultsshowthatBPneuralnetworkandPSO-BPneuralnetworkbothcanpredictthemeasure mentspaceerror,thepredictionresultsofPSO-BPneuralnetwork modelaremoreaccurate,andtherelativeerrorissmaller. 犓犲狔狑狅狉犱狊:AACMM;Spaceerror;BPneuralnetwork;PSO-BPneuralnetwork
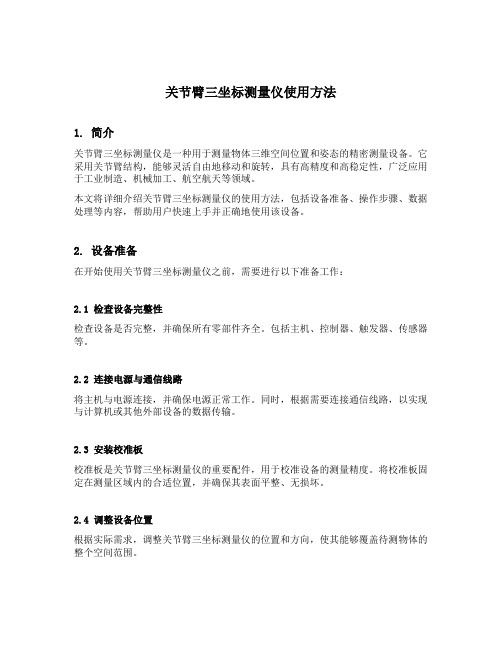
关节臂式三坐标应用
四、三坐标高级应用案例
2.虚拟装配分析
组装间隙优化 组装间隙优化前的初始对齐
优化时根据名义值调 整对齐,名义值来自 CAD或手动输入
组装间隙优化后的结果
四、三坐标高级应用案例
3.大灯装配分析
四、三坐标高级应用案例
4.顶棚漏雨分析
四、三坐标高级应用案例
5.汽车腰线分析
CAD模型
扫描数据
四、三坐标高级应用案例
补偿点 沿法向矢量
9
三、三坐标主要功能
1.基本测量功能:即测量零件的几何尺寸,形位公差(平面度,平行度,垂直度, 同轴度,位置度,直线度等),三维坐标。
10
三、三坐标主要功能
1.基本测量功能:即测量零件的几何尺寸,形位公差(平面度,平行度,垂直度, 同轴度,位置度,直线度等),三维坐标。
总拼焊装夹具的标定调整
1.精度高:测量精度达到0.049μm;
产品设计开发 汽车主机 厂品质保 证
2.便携性:轻便易携带,满足随时随地测量需要;
3.测量功能:可满足几何元素、三维坐标、 形位 公差、曲线曲面测量和扫描、逆向
大型零部 件的现场 测量
工程、CAD数模比对检测等测量;
4.测量范围:可实现6个自由度3.7m范围内的测 量(使用蛙跳球阵,测 量范围更广)
1.形变分析
碰撞试验前后,对于整车或零件关键位置的测量,研究形变量; 对于测试前后假人关键位置的测量,研究对于人体的冲击量。
20
四、三坐标高级应用案例
2.虚拟装配分析
Flush&Gap分析
四、三坐标高级应用案例
2.虚拟装配分析
Flush&Gap优化:软件对Flush&Gap按指定的约束进行优化, 并给出位移量(距离和角度),快速找到最佳安装位置
空间柔性机械臂运动功能可靠性分析

序 ,对 空 间柔 性 机 械 臂 的运 动 功 能 可 靠 性 进 行 了
力 ,采用 机 械 臂 协 助 或 代 替 宇航 员完 成 一 些 太 空 作 业 在经 济 性 和 安 全 性 两 方 面都 具 有 现 实 意 义 , 已 成 为 当前 空 间技 术 领 域 的 重 要研 究方 向 。与 地 面 机 械 臂 相 比 , 空 间 机 械 臂 具 有 微 重 力 、大 跨 度 、 轻 质量 、大 自重 比和 低 阻 尼 的特 点 , 因此 在 对 空 间机 械 臂进 行 动 力 学 分 析 时 必 须考 虑 臂 杆 的
( 北京邮电大 学 自动化学院,北京 1 0 7 ) 0 8 6 摘 要 :以空间柔性机 械臂 为研究对象 ,在同时考虑材 料参 数、几何参数不确定性和弹性变形的情况下
,
利用 L g a g 方法建立 了空间柔性 机械臂 的动力学 模型 。然 后 ,依 据响应面 法的基本 原 a rne
理 ,开发 了可靠度计 算算法 ,并对 空间柔性机械 臂的运动功 能可靠性进行 了分析计算 。结 果
表明 ,在基本随机变 量比较 少的 情况 下 ,该方法计 算速度快 、效率高 ,是 一种开展运 动功 能
可靠度计算的有效手段 。 关键词 :空间柔性机械臂 ;不确 定性 ;弹性变形 ;响应面法 ;运动功 能可 靠性 中 图分类号 :T 16 H 6 文献标识码 0 ( 0 1 ( 一 1 6 O 0 3 0
Do : . 9 9 .is 1 0 -0 4. 0 1 ). 6 i 1 3 6 /i s n. 0 9 1 2 0 0 下 3 0 . 3 1. (
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关 节 臂 式 柔 性 坐 标 测 量 机 测 量 空 间 分 析
合肥工业 大学 柯 龙
【 摘 要 】本 文 阐述 了 关节 臂 式坐 标 测 量机 的机 械 结 构 与 数 学模 型 ,讨 论 了结 构 对 于 测量 空 间 的 影 响 ,分 析 了测 量 死 角 的 情 况 ,并 且 利 用 数 值 分 析 法 分 析 了测 量 机 的 测 量 空 间 ,为 测 量 死 角 的情 形 进 行 了验 证 。
Ke y w or ds :c oo r d i n a t eme a s u ingm a r c Nn e; ho l l ow a re a; m e a s u r i ng a r e a
传 统 的笛 卡 尔 式正 交坐 标测 量机 u 由 得 到 被测量 点处 的坐 标值 ( 如图l 所 示 )。 于 体 积 大 、结 构 复 杂 、造 价 昂贵 ,而 且 受 2 . 测量 机数 学模 型 相 互 垂 直 的导 轨 和 安装 环 境 的限 制 , 因此 由关 节臂 式柔 性坐 标 测量 机 的结 构形 式不 难 看 出,其 结 构类 似于 工业 生 产 中的机 器 人 有 量 程 小 、不 易实 现 在 线 测 量 等 缺 点 ,不 手臂 , 因此关 节臂 式坐标 测量 机 的模 型建立 也可 以参 照工 业机 器人 的建 模方 法 。D e n a v i t 和 能满 足 很 多场 合 的应 用 要 求 。随 着 柔 性 化 H a r t e n b e r g _ 2 在1 9 5 5 年提 出 了两 个 相互 连 接 且相 对 运 动 的 构 件之 间相 互 关 系 的分 析 方
P
c o s 0 一s i n C 0 S a s i n0  ̄ C O S C O S , 0
O
Yv
Zห้องสมุดไป่ตู้
s i n口 .
0
1
节 和 一 个 接触 式 测 头组 成 ,6 个 转动 关 节 处 安有 圆光 栅角 度传 感器 ,前 端 的测头通 过接
和 在 线 测 量 等 要 求 的不 断提 出 ,新 型 非 笛 法 ,D — H 方 法 是在 两个 相互连 接且 相 互运动 的杆 件上 各 自固定 一个 坐标 系 ,然后 用一 个4 ×4 卡 尔 式 的 柔性 关节 臂 式 坐标 测 量 机 以其 便 的齐 次 变换 矩 阵 R P D — H 矩 阵来 描述 相邻 两 连杆 的 空 间关 系 。通过依 次变 换可最 终推导 出末端 携 、 灵 活 、造 价低 、量 程 大 的特 点发 展 迅 点位 置相对 于基座坐 标系 的位置 ,从而 建立坐标 测量机 系统 的数学模 型 。利 用齐 次 变 换矩 阵 。 : T 0 T T 。 T 。 T T T 。 ,模型 参数包 含有 杆件 的长 度 l 、杆件 的扭角 、关节 速 ,应 用 也 愈 发广 泛 , 测量 精 度 也越 来 越 我们 可 以表示 为T 高 ,适 宜 于 工 业现 场 的 使用 。 1 . 测量 机结 构 关 节 臂 式 柔 性 坐 标 测 量 机 的 结构 设 计 模 仿 了工 业 机 器 人 手 臂 的构 造 , 如 图 l 所 示 ,测量机 由基座 、3 根 测量 臂 、6 个转 动关 变量 和 杆件 i 的偏 置量 ( i = 1 ,2 ,… ,6 )。其测量 模 型 ,如 式 ( 1 ) 所示 。
【 关键词 】坐标测量机 ;空腔 ;测量 空间
Ab s t r a c t :t h e me c h a n i c a l s t r u c t u r e a n d ma he t ma i t c mo d e l o f t h e a r t i c u l a t e d a r m l f e x i b l e C MM i s i n t r o d u c e d, t h e i n l f u e n c e o f he t s t r u c t u r e o n he t me a s u r i n g a r e a a n d he t s i ua t i t o n o f h o l l o w re a a i s d i s c u s s e d, n u me r i c l a na a l y s i s i s u s e d t o na a l y z e he t me a s u i r n g re a a o f he t C MM ,t he s i ua t t i o n o f he t h o l l o w a  ̄ e a i s is d c u s s e d
3 . 测 量 空 间分 析 柔 性关 节臂 式坐 标 测量 机 的测 量空 间我 们 可 以定义 为测 量 机处 于正 常 工作 状态 下 ,末
触被 测工 件触 发信 号 ,此信 号被 反馈 给计 算 端 测头 所 能测 量 到 的空 间中所 有 点位 置 的集 合 。在 理想 状态 下 ,测 量机 的测 量 空 间应 为一 机处 理系 统 ,再结 合各 个旋 转关 节处 圆光栅 实 心球 体 ,并 且测 头 能够 探测 到 空 间 内的任 意 一点 。但 是在 实 际情 况 当 中, 由于 受到 测量 i 因为 固定 不动 而 不能 测量 到 以外 ,测 量机 的测 量 空 间有 可 能 机 结构 的影 响 ,除去 基座 5 位置 读取 的关 节转 动 角度值 ,通 过程 序 的运算 ,