阀控非对称缸被动式电液力伺服系统的解耦控制研究
对称阀控制非对称缸电液伺服系统建模分析
尸) 臼
— —
,
“
无 杆 腔活 塞有 效作 用 面 积 , 有杆 腔活 塞有 效 作用 面 积 ,
m
— —
式 ( . )所描 述 的伺 服 阀负 载流 量特 11 2 性 是 非线 性 的 。 系统 进行 动态 分析 时 , 对 必 须 将 这个 方程 线性 化 。 经过 线 性化 处理 后 的 负载 流量 特 性方 程为
出发 ,忽略 粘性力 和弹 性力 的影 响 , 各级 对 传 递 函数进 行简 化 , 整合 出对 称 阀控制 非对 称液 缸 电液伺服 系统 的传 递 函 。
l 液 压 动 力 机 构
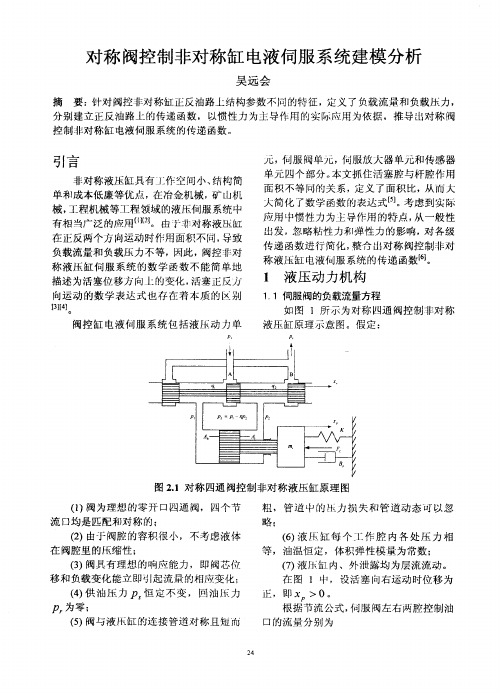
1 1伺服 阀的负载流量方程 . 如 图 1所 示 为对 称 四通 阀控制 非对 称 液压 缸原 理示 意 图。假 定 :
( .) 19
( .0 11 )
,
, , 出的流量 q 为 从 液 缸 同汕 腔流 U V ,
记 伺 服 阀 的负载 流量 为 q ,则有 【 , 3
q£= q 1 ( .1 11 )
J C
4 ~ 一 - C p)C
. ‘ 4 ・
ห้องสมุดไป่ตู้p
式 中 : C — — 液 缸 内 泄 露 系 数 ,
q= dx/P 2 CW 1 2 三 V
(2 1) ・
式 L : q — — 汕缸 尢 杆腔 流量 , m s } j q — — 油缸 有 杆腔 流量 , S C —流 量 系 数 ,无量 纲 — 节流 阀 口面 积梯 度 , m x 电液 伺 服 阀 阀芯 位 移 , m p—— . 度 , k m 油密 g P — — 汕源 压 力 , 尸 P — — 油缸 尢 杆腔 力 . Pa P — — 油 缸有 杆腔 压 力 , Pa 根据 流 量 的连 续性 , 呵写 山每个 液 缸 l 作腔 的流 量方 程 , 即 流 入液 缸 进 油腔 的流 量 g 为 + :+ c( )c . (・ 3
基于SIMULINK的阀控非对称液压缸系统的研究

中图分类号:THl37.8
文献标识码:A
文章编号:1672—8904(2008}01—0003-003
1引 言
在现代化工业生产中,非对称液压缸具有占用 空间小、加工密封简单、制造成本低等的优点,因而 在一些精度要求不太高的场合得到了广泛的应用。 笔者在建立阀控非对称液压缸的数学模型的基础 上,引入了闭环PID位置控制,并利用MATLAB中 的SIMULINK模块库仿真与分析研究其控制性能。
效作用面积之差导致了液压缸活塞杆外伸与内缩
时一些参数的改变,因此,应分别对液压缸活塞杆
外伸与内缩进行分析研究(本文仅以活塞杆外伸为
例进行了仿真分析,有关活塞杆内缩的情况读者可 根据下述方法自行设计仿真,在此不再赘述)。在这
一液压伺服系统中,我们尝试从阀的负载压力一流
量特性、油缸负载流量方程和液压缸的力方程三方
综上所述的结论,搭建系统的SIMULINK模型 如图4所示。由于系统外负载力为不定参量,所以 可用随机模块来表示。为了能更好地说明系统的准 确性,系统仿真过程中分别使用了正弦信号、阶跃 信号以及方波信号作为系统的输入信号来进行系 统的仿真,其仿真结果如图5、图6、×104
控
图3阀控非对称液压缸控制系统方框图
4仿真
‘。 ‘。~i根据式(4)所得公式代入表(1)所示数据并经
整理得:
Y—.
1.66x106
U
s3+8.23s2+9604s
Y
一0.00083s一0.0067
凡
s3+8.2382+9604s
本文中,我们采用的是增量式PID控制器。在
设计该控制器的过程中,我们对控制器的比例系数 K,,积分系数Ki以及微分系数Kd进行了调节,从 而提高了系统的稳定性、响应速度、超调量以及稳 态精度。在研究过程中,我们采用试凑法选取了 Kp=0.020、Ki=O.003以及Kd=O.00 1。
非对称活塞式摆动液压马达的电液比例的控制系统设计
扬州大学广陵学院本科生毕业论文毕业论文题目非对称活塞式摆动液压马达的电液比例的控制系统设计学生姓名专业班级指导教师完成日期中文摘要本文对电液比例阀位置控制系统的工作原理及各组成部分进行了详细的分析,并对活塞式滚珠螺旋摆动液压马达进行了设计和计算及附了马达的零件图和组装图,以及建立了非对称阀控非对称缸位置控制系统的数学模型并计算出了此系统的开环传递函数。
而且,利用Matlab软件,创立了系统仿真模型,生成了位移输出的Bode图、阶跃响应曲线和正弦响应曲线。
另外用Matlab对系统特性进行仿真分析的基础上,针对系统稳定性的问题,提出了系统校正问题,并采用了比例—积分(PI)控制,使非对称活塞式摆动液压马达电液比例阀位置控制系统具有良好的动态特性和静态特性,达到了预期的研究目的。
关键词:非对称缸、非对称阀、数学模型、传递函数、Matlab仿真、PI校正AbstractThe work principle and every component of electrohydraulic proportional value-control system are analyzed in detail in the paper.And the ball screw swinging piston hydraulic motor has carried on the design and calculation,attached the detail part and assembly drawing (two-dimensional diagram and three-dimensional diagram )of the motors.As the same time the paper creates the mathematical model of asymmetric valve controlled asymmetric cylinder position control system and calculated the open-loop transfer function of the system.Moreover the paper set up the simulation model of the system in the advantage of the Mat-lab software and generates the Bode diagram、step response curve diagram and sine response curve of the displacement output.On the basis of the simulation analysis with Mat-lab of the system characteristics,PI control strategy is brought forward as to the stability of the system,it brings the better dynamic and static characteristics to the Asymmetric piston swing hydraulic motor Electro-hydraulic proportional valve position control system to attain the expected objective.Keywords:Asymmetric hydraulic cylinder、Asymmetric servo valve、mathematic(al) model、transfer function、Mat-lab simulation、Proportional - integral(PI)correction目录中文摘要 (1)Abstract (2)第1章绪论 (5)1.1课题研究的目的及意义 (6)1.2论文主要工作 (6)第2章活塞式滚珠螺旋摆动液压马达的工作机理 (8)2.1概述 (8)2.2活塞式滚珠螺旋摆动液压马达原理和特点 (8)2.2.1活塞式滚珠螺旋摆动液压马达的工作原理 (8)2.2.2活塞式滚珠螺旋摆动液压特点 (9)2.3活塞式摆动液压马达主要技术参数之间的关系 (10)第3章活塞式滚珠螺旋摆动液压马达设计计算 (13)3.1概述 (13)3.2活塞式滚珠螺旋摆动液压马达的主要参数计算 (13)3.2.1液压缸的主要参数计算 (13)3.2.2滚珠逆螺旋传动装置的参数计算 (15)3.3活塞式滚珠螺旋摆动液压马达的强度计算 (19)3.3.1液压缸强度计算 (19)3.3.2螺旋传动轴的强度计算 (21)3.3.3滚珠与滚道之间的接触强度计算 (23)3.4活塞式滚珠螺旋摆动液压马达的主要零件结构 (25)第4章非对称活塞式摆动液压马达电液比例系统设计 (41)4.1非对称缸用非对称阀来控制 (41)4.2非对称阀的静态特性分析及数学模型的建立 (41)4.2.1基本模型 (41)4.2.2 活塞式液压摆动马达正向运动 (42)4.2.3 活塞式液压摆动马达反向运动 (47)4.3比例放大器传递函数 (51)4.4高性能电液比例阀传递函数 (51)4.5位移传感器传递函数 (52)4.6系统传递函数方框图 (52)4.7系统传递函数及函数各参数的确定 (52)4.8系统特性(系统校正前Bode图、阶跃响应) (56)4.8.1对数频率特性图(伯德图或Bode图) (56)4.8.2系统的单位阶跃响应 (58)第5章用PI调节器对系统进行性能校正和仿真分析 (59)5.1控制系统校正的概述和PI校正概述 (59)5.1.1控制系统校正的概述 (59)5.1.2PI校正的概述 (59)5.2 PI仿真数学模型的建立 (60)5.2.1确定开环增益 (60)5.2.2计算未校正系统的相位裕量和幅值裕量 (60)5.2.3确定校正后系统的截止频率 (61)5.2.4确定校正装置的参数 (61)5.2.5确定校正后系统的开环传递函数 (61)参考文献 (66)致谢 (67)第1章绪论1.1课题研究的目的及意义摆动液压马达是一种输出轴作摆动往复运动的液压执行元件。
非对称泵控差动缸速度伺服系统特性

度进行动态补偿 。仿真和试验结 果表 明,该控制策 略有 效改善差动缸伸 出和收 回速度动静态性能 ,提高 了系统能量效率 。
关键词 :差动缸 非对称泵 非线性 动态 前馈 能量效率 中图分类 号:T H 6
Ch a r a c t e r i s t i c s o f As y mm e t r i c a l Pum p Co n t r o l l e d Di f f e r e n t i a l Cy l i n d e r S pe e d Se r v o S y s t e m
T a i y u a n U n i v e r s i t y o f T e c h n o l o g y , T a i y u a n 0 3 0 0 2 4 )
Ab s t r a c t :I n o r d e r t o s o l v e t h e lo f w a s y mme t r y o f he t d i fe r e n t i a l c y l i n d e r c a u s e d b y t wo - c h a mb e r a r e a d i f e r e n c e , he t s t r u c t u r e c h a r a c t e i r s t i c s o f a s y mm e t r i c a l p u mp i s a p p l i e d t o c o mp e n s a t e a u t o ma t i c a l l y lo f w d u r i n g mo t i o n . Ho we v e r , b e c a u s e he t d i fe r e n c e o f w o t — c a v i t y re a a i s n o t a s t r i c t p r o p o r t i o n r e l a t i o n a n d t h e r e re a n o n l i n e r a e f e c t s s u c h a s c a v i t a t i o n s a n d l e a k s ,t h e s p e e d i s i n c o n s i s t e n t wh e n d i fe r e n t i a l c y l i n d e r s t r e t c h e d a n d r e t r a c t e d ,t he p e r f o r ma nc e o f d y n a mi c a n d s t a t i c i s p o o r ,a n d he t e n e r g y
多轴车辆轮桥加载试验台的解耦控制实验研究

第50卷第4期中南大学学报(自然科学版) V ol.50No.4 2019年4月Journal of Central South University (Science and Technology)Apr. 2019 DOI: 10.11817/j.issn.1672−7207.2019.04.013多轴车辆轮桥加载试验台的解耦控制实验研究王慧1, 2,赵国超1,金鑫1(1. 辽宁工程技术大学机械工程学院,辽宁阜新,123000;2. 哈尔滨工业大学机电工程学院, 黑龙江哈尔滨, 150001)摘要:为研究多轴车辆轮边和传动桥的工作特性和可靠性,模拟四轴车辆的实际工况,基于二次调节技术试制轮桥模拟加载试验台。
针对轮桥试验台驱动转速和输出转矩存在的耦合干扰问题,建立系统传递函数并求解出传递函数之间的对角矩阵,利用对角矩阵对系统进行解耦控制,通过轮桥模拟加载试验台进行耦合干扰实验及解耦控制实验。
研究结果表明:通过对角矩阵对试验台进行解耦控制,能有效解决驱动转速和输出转矩之间的耦合干扰问题,本实验中驱动转速误差减小78%,二次输出转矩误差减小67%,轮边输出转矩误差减小29%,解耦后提高了试验台可控性,可使试验台满足车辆轮桥的动态模拟加载实验的需求,研究结果可为此类轮桥试验台的设计及模拟加载实验提供一定的实验基础。
关键词:多轴车辆;传动桥;试验台;解耦控制;模拟加载中图分类号:TH113; TP302 文献标志码:A 文章编号:1672−7207(2019)04−0854−10Experimental study on decoupling control forwheel-bridge simulated test bench of multiaxial vehiclesWANG Hui1, 2, ZHAO Guochao1, JIN Xin1(1. School of Mechanical Engineering, Liaoning Technical University, Fuxin 123000, China;2. School of Mechanical and Electronic Engineering, Harbin Institute of Technology, Harbin 150001, China)Abstract: In order to study the working characteristics and reliability of multiaxial vehicles' wheel-bridge, the actual working conditions of the four-axle vehicle were simulated and the wheel-bridge simulated loading test bench was established based on the secondary regulation technology. In view of the coupled interference problem between the driving speed and output torque of wheel-bridge test bench, the system transfer function was established, and the diagonal matrix between the transfer functions was solved. The diagonal matrix was used to decoupling the system and the coupled interference experiment and decoupling control experiment were carried out by the wheel-bridge test bench. The results show that the decoupling control of the test bench by the diagonal matrix can effectively solve the coupled interference problem between the driving speed and the output torque. In this test, the drive speed error is reduced by 78%, the secondary output torque error is reduced by 67% and the wheel side output torque is reduced by 29%. The test bench has better controllability by using diagonal matrix decoupling control, and it can meet the demand of vehicle wheel-bridge dynamic simulation loading experiment. The results can provide a certain experimental basis for the design of this kind of wheel bridge test bench and the simulated loading experiment.Key words: multiaxial vehicle; drive axle; test bench; decoupling control; simulated loading收稿日期:2018−06−19;修回日期:2018−08−01基金项目(Foundation item):国家自然科学基金资助项目(51405213) (Project(51405213) supported by the National Natural Science Foundation of China) 通信作者:王慧,博士,教授,从事二次调节技术研究;E-mail:*******************第4期王慧,等:多轴车辆轮桥加载试验台的解耦控制实验研究855随着对车辆安全可靠性和运行性能要求的不断提高,车辆关键部件的模拟加载试验研究越来越受到重视[1–2]。
电液位置伺服系统最少拍控制应用研究
Vo . 8 No. 12 6 De 2 9 c. oo
电液 位 置 伺 服 系统 最 少 拍 控 制 应 用 研 究
曹 清 华 , 萍先 刘
( 昌工 程 学 院 机 械 与 动力 工程 系 , 西 南 昌 309 ) 南 江 309
摘 要 : 对 电液 伺 服 控 制 系统 的 特 点 , 行 了计 算 机 控 制 系统 的 整 体 设 计 , 针 进 以对 称 阀控 制 非对 称 缸 的 数 学模 型 为 基础 , 考虑 一般 电液 伺 服 系统 的 元 件 , 对伺 服 阀 、 服 放 大 器 、 / A D卡 进 行 了 简化 , 到 整 体 模 型 , 用 最 少 拍 伺 D A、 / 得 运
mo e fsmmercv lec nr l n s mmercc ln e , n i l id te ee t - y ru i e v o t ls s d lo y ti av o t l ga y o i t y id r a d smp i e h lcr h d a l s roc nr y - i f o c o tr o o e t u h a ev av s r oa l es, A , e c mp n nss c ss ro v e,e v mp i r D/ A/ D a . h x e me ts o h tt i d e s n l i f c r T ee p r n h wst a smo li d i h
O 引 言
电液伺 服 系统 是 由电 的信 号 处理部 分与液 压 的功率 输 出部 分组 成 的闭环 控 制 系统 . 由于液 压 系统 的一
些特征 参数 , 如液压 阻 尼 比、 压缸 固有 频率 以及 外 界负 载 干扰 力等 随 油温 、 液 油压 等外 界 环境 的改 变将 发 生
基于模糊PID的阀控非对称缸系统仿真研究
非 常 适 合 电液 伺 服 阀控 缸 ( 尤 其 是 非 对 称 缸 )液 压 系统 。 本文 以 四通伺 服 阀控非 对称 缸 系统为 例进 行分 析 ,结合 模 糊 自适 应P I D控制 原 理 ,设计 了模 糊控 制器 并将 其 应用 于该 系统 中,以提 高 系统 的控 制精 度 和 抗干 扰能 力 ,并 利用MA T L AB / s i mu l i n k 软 件对 建立 的模型 进行 仿真 分析 ,验 证其 可行性 。
显 示 了很好 的鲁棒 性 和很 强 的控 制稳 定性 , 因此
1 )四通 伺 服 阀的流 量方程
假 定 阀是 零 开 口四边 阀 , 四 个节 流 口是 匹 配 和 对称 的 ,供 油压 力P 恒定 , 回油压 力P 0 为零。
g £= X v + : 一 ( 1 )
原 理 图 ,根 据 文 献 [ 3 ] 和【 6 】 可 列 出各 液 压动 力 元 件
的基本 方程 。
常 规P I D控制 则 毫无 优 势 可言 。此时 ,智能 控 制 系 统便 展现 出 了优 越 的性 能 。
模糊 逻辑 控制 基 于人 类经验 ,不 苛求 控制 理论 建 立的精 准数 学模 型 ,对非 线性 、复杂对 象 的控制
D o i :1 O . 3 9 6 9 / J . I s s n . 1 0 0 9 -0 1 3 4 . 2 0 1 3 . 1 2 ( 上) . 2 6
0 引言
电液伺服 阀控缸 液压 系统 以其控制精确高 的 特 点 在 钢 铁 冶 金 、 矿 山 等 行 业 中 获 得 广 泛 的 应 用 。传 统 的P I D控 制 虽然 简 单 、整 定 参 数 方 便 , 但 是 却 因 负 载 、 流 量 等 参 数 的 变 化 而 无 法 获 得 快 速 、高 精 度 、 自适 应 跟踪 好 的动 态 效果 u 。再 加上
基子CMAC神经网络的电液比例速度控制系统研究
式 中 : 为移 动 部 件 质量 ; m。 Y为 位 移 ; 为 黏 性 阻 尼 系 C 数 ;
▲ 图 2 控 制 系 统 方块 图
为 等 效 弹 簧 刚 度 ;o 预 压 缩 量 ; y 液 动 力 和 Y为 F 为
阀 芯 库 仑 摩 擦 力 先 导 阀 的力 输 出 为 :
路 将 液 控 单 向 阀 打 开 . 上 腔 液 压 油 通 过 液 控 单 向 阀 和 单 向 减 压 阀 回 油 。 位 工 作 时 . 力 油 通 过 单 向 减 压 阀 右 压
和 液 控 单 向 阀 进 入 液 压 缸 上 腔 .同 时 打 开 平 衡 阀 组 左 侧 的 节 流 阀 . 腔 的 液 压 油 在 流 经 平 衡 阀 组 时 . 于 节 下 由 流 阀 的 背 压 . 压 缸 带 动 负 载 下 降 时 可 以平 稳 运 行 . 液 保
电 液 比例 控 制 系 统 以其 控 制 简 单 、 性 能 稳 定 等 特 点 已 经 广 泛 地 应 用 于 各 个 工 业 领 域 [ . 其 以 电 液 比 1尤 ]
例 阀 控 非 对 称 缸 应 用 最 广 .但 是 电 液 比 例 控 制 系 统 是
典 型 的 非 线 性 系 统 . 系 统 中 的参 数 不 易 确 定 且 易 发 生 变 化 [。同 时 在 复 杂 电 液 比 例 系 统 中 . 于 液 压 部 件 较 2 ] 由 多 和 建 模 误 差 等 原 因 .使 现 有 的 控 制 器 在 控 制 效 果 上 无 法 满 足 实 时 控 制 的 要 求 小 脑 模 型 ( ee elr Mo e Ar c lt n o t C rb l d l t uai C n. a i o rl r ol 。CMAC) JSAlu e 是 .. b s在 1 7 年 提 出 的 一 种 模 拟 95 小 脑 功 能 的 神 经 网 络 模 型 .它 不 仅 具 有 一 般 神 经 网 络
被动式电液伺服加载系统的多余力抑制
要求配置合适的蓄能器,使系统有适当的体积弹性模量,从而使活塞运动所产生的多余力在可控制的范围之 内;其次通过结构不变性原理对多余流量进行精确补偿,但由于伺服阀的流量增益与负载压力是非线性的,
采用状态观测器获得内部压力,以实现对流量的精确控制。以AMESim.Simulink为基础建立联合仿真模型, 仿真结果表明,采用上述方法对多余力的抑制效果有明显提高。 关键词:被动伺服加载;多余力;结构不变性;AMESim 中图分类号:THl37;TV273文献标志码:B文章编号:1000-4858(2014)05-0052-05
必V=—K.K生q(pL)
(6)
由于结构不变性原理在常规应用中往往将疋(P。)
图2
电液伺服加载系统方框图
万方数据
54
液压与气动
2014年第5期
图3应用结构不变性原理后的系统方框图
工作区
图4系统控制部分Shnulink模型
作为常值,而实际Kq(P。.)却是非线性的,简单的线性 化处理将不能使强迫流量得到完全补偿,从而导致结 构不变性原理的补偿效果大幅度降低。因此,考虑实 时负载压力下伺服阀的流量增益非常有必要。 虽然由式(1)可得实时缸压和流量的关系,但是 实际中测量伺服阀的负载压力往往会提高成本。而由 式(5)可知通过控制流量可以补偿干扰位移的运动, 式(1)也说明流量与液压缸内压力有关。因此在没有 压力传感器的情况下,利用现代自动控制理论通过系 统重构建立一套状态观测系统,采用状态观测器预估 系统状态的办法,实时地修正状态观测系统,使其与实 际系统一致¨…,从而保证观测器中液压缸两端的压力 与实际系统中的一致,其控制模型如图4所示。
2结构不变性原理的应用与改进
当假设,相关假设可参考文献[9]。除此之外,加载液压 缸与等效负载视为刚性连接,力传感器刚度较高,其弹
阀控非对称缸电液伺服系统线性自抗扰控制
问题,本文提出了一种电液伺服系统线性自抗扰控制方法,利用线性扩张状态观测器实现综合扰动的实
时估计,并采用状态误差反馈控制律给予主动补偿,同时消除跟踪误差。证明了设计的线性扩张状态观
测器状态观测误差的收敛性。根据工程实际中的参数进行仿真研究,其结果表明这种控制方法能有效
抑制电液伺服系统中不确定性扰动,与PIT控制器相比具有较强的鲁棒性,并提高了位置跟踪精度。
181
匹配线性未知参数与非线性未知参数之间的耦合
问题,仿真 了该方法的有。方
[14]针
对电液位 服 存在的非线性、参数
问题,给出了 [15]为
自适应动态面控 设计方法O
电液控
中非线性不
数
的 ,提出了 滑模自适应控制方
,通过构建 的Lyapncov函数,设计了
自
适应控,给出了参数自适应律, 控 能oGDOURAEK等〔心 电液
收稿日期:201852-55 基金项目:山西省煤机重点科技攻关项目(MJ2014-02) 作者简介:金坤善(1778 -),男,博士研究生,主要研究方向为锻压设备及其先进控制技术;通信作者:宋建丽教授,E-maU:
sovgjianC@ bistu. edn. cn.
第44卷第3期
金坤善,等:阀控非对称缸电液伺服系统线性自抗扰控制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c o u p l i n g p r o b l e m.T a k i n g v a l v e c o n t r o l l e d a s y mm e t i r c a l c y l i n d e r p a s s i v e e l e c t r i c h y d r a u l i c s e l ' v o s y s t e m a s t h e r e s e a r c h o b j e c t ,i t s
L u o y a n g H e n a n 4 7 1 0 0 3 ,C h i n a )
Ab s t r a c t :T o s o l v e s u r p l u s f o r c e i n t e r f e r e n c e p r o b l e m o f p a s s i v e e l e c t i r c h y d r a u l i c s e Ⅳ0 s y s t e m,a c c o r d i n g t o t h e s y s t e m c h a r a c —
St u dy o n De c o u pl i n g Co nt r o l f o r Pa s s i v e El e c t r i c Hy d r a ul i c S e r v o S y s t e m wi t h Va l v e Co n t r o l l e d As y mm e t ic r a l Cy l i nd e r
2 0 1 3年 1 月
机床与液压
MACHI NE T 0OL & HYDRAUL I CS
J a n . 2 01 3
Vo 1 . 41 No .1
第4 1 卷 第 1 期
DOI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . O 1 . 0 0 3
阀控 非 对称 缸 被 动 式 电液 力伺 服 系统 的 解耦 控制 研 究
李阁强 ,李水聪 ,黄 飞
( 河 南科 技 大 学机 电工程 学 院 ,河南 洛 阳 4 7 1 0 0 3 )
摘要 :为解决被动式 电液力伺服系统 中的多余力干扰 问题 ,根 据系统特点 ,提出基于 多输人多输 出控制 系统的解耦 控 制方法来解决力/ 位耦合 问题 。以阀控非对 称缸 被动 式 电液力伺 服 系统 为对象 ,建立 系统 的数学 模 型 ,设 计解 耦控 制器 。
仿真结果表 明 :使用该解耦 控制方法不仅可 以提高 系统 的跟踪 精度和频响 ,而且可 以缩短控制调试周期 。 关键 词 :阀控 非对 称缸 ;被动式电液力伺服系统 ;解耦控制 பைடு நூலகம்图分类号 :T H 1 3 7 . 7 文献标识码 :A 文章 编号 :1 0 0 1— 3 8 8 1( 2 0 1 3 )1— 0 0 7— 4
ma t h e ma t i c mo d e l w a s e s t a b l i s h e d a n d a d e c o u p l i n g c o n t r o l l e r w a s d e s i g n e d .T h e s i mu l a t i o n r e s u l t s s h o w t h a t u s i n g ・ t h e d e c o u p l i n g c o n - t ol r me t h o d,n o t o n l y t h e s y s t e m t r a c k i n g p r e c i s i o n a n d f r e q u e n c y r e s p o n s e a r e i mp r o v e d,b u t a l s o c o n t r o l d e b u g g i n g c y c l e i s s h o r t e n e d . Ke y wo r d s :Va l v e c o n t r o l l e d a s y mme t i r c c y l i n d e r ;P a s s i v e e l e c t i r c h y d r a u l i c s e r v o s y s t e m ;De c o u p l i n g c o n t r o l
t e r i s t i c s,a de c o up l i n g c o nt r o l me t h od ba s e d o n mu l t i p l e — i n pu t mul t i p l e — o u t p u t c o n t r o l s y s t e m wa s p r e s e n t e d t o s o l v e t h e f o r c e /p o s i t i o n
LI Ge q i a n g, LI S h ui c o n g, HUANG F e i
( E l e c t r o m e c h a n i c a l E n g i n e e r i n g C o l l e g e ,He n a n U n i v e r s i t y o f S c i e n c e& T e c h n o l o g y ,