爱普生传送带跟踪培训资料
带式输送机培训课件资料共21页文档
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
21
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
带式输送机培训课件资料
11、获得的成功越大,就越令人高兴 。野心 是使人 勤奋的 原因, 节制使 人枯萎 。 12、不问收获,只问耕耘。如同种树 ,先有 根茎, 再有枝 叶,尔 后花实 ,好好 劳动, 不要想 太多, 那样只 会使人 胆孝懒 惰,因 为不实 践,甚 至不接 触社会 ,难道 你是野 人。(名 言网) 13、不怕,不悔(虽然只有四个字,但 常看常 新。 14、我在心里默默地为每一个人祝福 。我爱 自己, 我用清 洁与节 制来珍 惜我的 身体, 我用智 慧和知 识充实 我的头 脑。 15、这世上的一切都借希望而完成。 农夫不 会播下 一粒玉 米,如 果他不 曾希望 它长成 种籽; 单身汉 不会娶 妻,如 果他不 曾希望 有小孩 ;商人 或手艺 人不会 工作, 如果他 不曾希 望因此 而有收 益。-- 马钉路 德。
传送带跟踪

16.1传送带跟踪是一种流程,即机器人从固定或移动的传送带上拾取工件并被视觉系统或传感器发现。
EPSON RC+ 7.0传送带跟踪选项支持跟踪和索引的传送带系统。
•跟踪传送带系统传送带持续移动。
视觉系统或传感器系统发现其上的工件且机器人在工件移动时拾起它们。
跟踪过程中,机器人可以在拾取工件时沿着工件移动。
•索引的传送带系统传送带移动一个指定的距离,然后停止。
视觉系统发现工件,机器人拾起每个工件。
找到并拾取所有的工件后,传送带重新开始移动。
每个系统上一共可以定义16个实体传送带。
实体传送带有一个编码器,其信号由编码器板接收。
在每个项目中最多可以定义16个逻辑传送带。
若要定义逻辑传送带,设置传送带数量、机器人数量、编码器数量并选择视觉或传感器。
支持多个传送带。
传送带跟踪选件可用于直线传送带和循环传送带,如下图所示。
这些传送带具有不同的校准和编程方法。
有关详细信息,请参阅16.11 视觉传送带和16.12 传感器传送带。
相机机器人直线传送带部件直线传送带跟踪系统相机机器人部件循环传送带循环传送带跟踪系统16.2跟踪传送带系统1.视觉系统或传感器系统在连续移动的传送带上找到工件。
2.机器人在传送带上的工件移动时拾起它们。
索引的传送带系统1.传送带移动了一个指定的距离。
2.视觉系统或传感器系统在传送带停止时找到工件。
3.机器人拾取视觉系统发现的工件。
传送带图2.1 跟踪传送带系统传送带图2.2 索引传送带系统16.3若要使用传送带跟踪,必须在系统上安装每个实体传送带的编码器。
每个编码器连接到PG(脉冲发生器)板上的一个单一通道上。
每块板最多可容纳4个编码器。
还为每个编码器提供触发输入以锁存位置,如与频闪视觉摄像头一起使用时。
PG板的规格下表显示了PG板的规格。
板名称H756兼容控制器 RC700/ RC90 (EPSON RC+ 7.0)板的扩展能力 最多4个板编码器通道 4个通道/板编码器类型 ABZ相差分输入(RS-422线路接收器)输入脉冲率 最高5 MPPS输入信号 传送带脉冲锁存输入板地址 按照板号设置DIP开关。
爱普生培训资料:创建程序
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
209
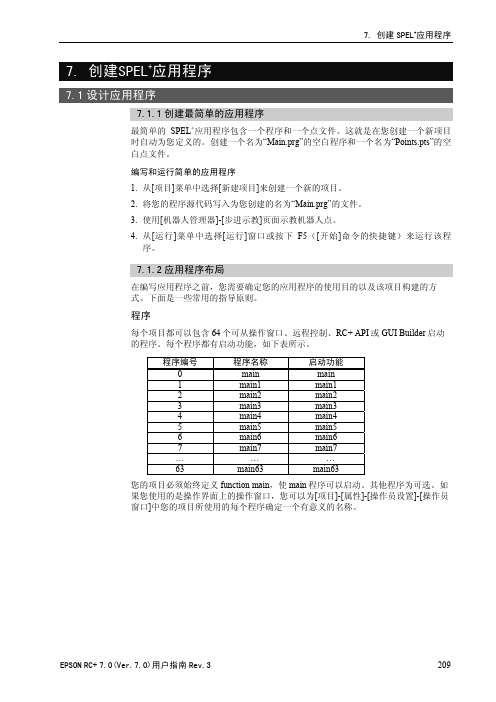
7. 创建 SPEL+应用程序
操作界面
操作窗口 使用与 EPSON RC+ 7.0 一起提供的操作窗口。您可以配置 EPSON RC+ 7.0,这样在 Windows 启动后,EPSON RC+ 7.0 将以自动模式启动,其会自动打开操作窗口。 操作员可以选择 64 个程序。也可以选择使用“暂停/继续”按钮、I/O 监视器、机器人 管理器和系统历史查看器。
210
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
7. 创建 SPEL+应用程序
7.1.3 开机时自动启动
您的应用程序可以 Windows 用户自动登录并在 Windows 启动后启动您的 SPEL+项 目。 请参阅 4.2.7 自动启动 。
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
若要使用操作窗口让程序启动和停止,控制装置必须从[设置]-[设置控制器]-[控制 器]-[配置]中设置设为 Self。 有 关 配 置 EPSON RC+ 7.0 自 动 启 动 的 详 细 信 息 , 请 参 见 操 作 一 章 中 的 “ 启 动 模式 ”。
远程控制 使用远程控制打开/关闭电机,将机器人返回起始点,启动程序等。可以用一个简单 的按钮盒或可以连接 PLC。 使用远程控制时,控制装置必须在[设置]-[设置控制器]-[SPEL 控制器板]-[配置]中设 置为远程。
编写和运行简单的应用程序从运行菜单中选择运行窗口或按下f5开始命令的快捷键来运行该程712应用程序布局在编写应用程序之前您需要确定您的应用程序的使用目的以及该项目构建的方式
爱普生机器人软件编程操作培训-基础内容PPT课件
1)单击程序最左端设置断点
2)在工具栏上单击打开运行窗口图标“ ” ,打开运行窗口,单击
“开始”运行程序
3)按“F11”或单击图标“ 个断
点。
” 运行下一行。按“F7”或单击图标“
” 运行到下一
单击此处 设置断点
单击“开始”运行函数
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1.6 局部变量、模块变量及全局变量的定义及区别
Integer I
‘局部变量i
...
Fend
Function Func1 Integer I ... Fend
‘局部变量i
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1.7 编写一个初始化函数打开马达、设定运行功率及速度(参看程序init_demo)
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1、程序操作
3)以太网通讯程序
爱普生机器人软件编程操作培训-基础内容
1、程序操作
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1.13 矩阵使用程序(参看程序pallet_demo) 1)矩阵定义
爱普生机器人软件编程操作培训-基础内容
1、程序操作
2)矩阵调用程序
爱普生机器人软件编程操作培训-基础内容
1)局部变量:在一个函数内定义的变量,只能在同一函数内使用 2)模块变量:在程序的开头定义,可以在同一个程序里使用 3)全局变量:可以在同一个项目里使用
Integer m_i
‘模块变量m_i
Global (Preserve) Integer g_i
‘全局变量(全局保护变量)g_i
Function main
技能培训专题爱普生4轴机器人培训

06
CATALOGUE
安全操作规范培训
安全防护装置功能介绍
安全防护装置的种类和作用
01
包括安全光栅、安全垫、急停按钮等,确保操作过程中的安全
。
安全防护装置的工作原理
02
通过光电、机械等原理实现安全防护,避免机器人与人员的直
接接触。
安全防护装置的检查与维护
03
定期检查安全防护装置的完好性,确保其正常工作。
培训意义
随着工业自动化的快速发展,工业机器人已成为企业提高生产效率、降低成本的 重要手段。通过本次培训,参训人员将深入了解爱普生4轴机器人的性能特点和 应用领域,提高自身的技能水平和竞争力,为企业的发展做出贡献。
参训人员要求
01
02
03
04
具备一定的机械、电气或自动 化基础知识,了解工业机器人
的基本原理和应用。
调试方法
通过打印日志、单步调试、断点调试等方式定位问题,结合代码逻辑和机器人 实际表现进行分析。
优化策略
针对程序性能瓶颈进行优化,如减少计算量、优化算法、使用并行计算等方法 提高程序运行效率。同时,注意代码的可读性和可维护性,以便后续开发和调 试。
05
CATALOGUE
设备维护与保养知识普及
设备日常检查项目清单
随着5G、物联网等新技术的普及, 机器人将会在更多领域得到应用,如 智能制造、智慧物流、智能家居等。
未来机器人将会更加智能化、自主化 ,具备更强的学习和适应能力。
未来机器人行业将会更加注重人才培 养和团队建设,提高行业整体的技术 水平和创新能力。
THANKS
感谢观看
爱普生4轴机器人操作
包括机器人的定义、分类、组成结构、工 作原理等基础知识。
皮带输送机培训课件(完整版)

皮带输送机培训课件(完整版)皮带输送机培训培训内容1、皮带输送机的组成2、3、皮带机各结构用途皮带机各结构点检内容输送带输送机的定义带式输送机是用于皮带输送带中起承载和运送物料作用的橡胶与纤维、金属复合制品。
皮带输送机在农业、工矿企业和交通运输业中广泛用于输送各种固体块状和粉状物料或成品物品,输送带能连续化、高效率、大倾角运输,输送带操作简单、维修容易、运费低廉,并能缩短运输距离,降低工程造价,节省物力。
皮带机的简介1、皮带运输机又称带式输送机,是一种连续运输机械,也是种通用机械。
皮带运输机被广泛应用在港口、电厂、钢铁企业、水泥、粮食以及轻工业的生产线。
即可以运送散状物料,也可以运送成件物品。
工作过程中噪音较小,结构简单。
皮带运输机可用于水平或倾斜运输。
皮带运输机还应用与装船机、卸船机、堆取料机等连续运输移动机械上。
皮带运输机由皮带、机架、驱动滚筒、改向滚筒、承载托辊、回程托辊、张紧装置、清扫器等零部件组成。
在大型港口或大型冶金企业,皮带运输机得到最广泛的应用。
其总长度可大十几千米。
皮带机输送简介1普通皮带运输机的提升角度一般不大20度,原因是当皮带运输机的倾角大于20度时对大多数的物料来讲都会发生物料下滑的情况,即物料在皮带上的摩擦力过小发生下滑。
2对输送煤炭的皮带运输机一般提升角度不大于15度,对输送烧结球团的皮带运输机提升角度不大于12度。
如果物料相对粒度较小,其提升角度可选较大值。
3特殊的皮带运输机其提升角度可大于45度,其皮带的构造是特殊制造的。
在此不做详述。
皮带机驱动简介Page 7皮带运输机的驱动装置由单个或多个驱动滚筒驱动,驱动电机也可以是单个电机或多个电机驱动。
一般驱动装置包括电动机、减速机、液力偶合器、制动器或逆止器等组成。
偶合器的作用是改善皮带运输机的启动性能。
制动器和逆止器是为了防止当皮带运输机停机时皮带向下滑动。
皮带机及控制简介皮带运输机的电气保护和控制装置主要有:拉绳开关、皮带跑偏检测开关、皮带打滑检测、皮带防撕裂检测、料流检测、堵料检测、皮带秤。
爱普生初级培训资料

关闭伺服 打开伺服
在伺服ON时可以选择 单独释放一个或多个 轴,六轴机械手除外
当机械手出现报 警时单击重置复
位报警
22
四、RC+ 7.0软件操作
4.1 点位示教
工具→机器人管理器 →步进示教 或单击工具栏 图示
图标后,选择“步进示教”页面。如下
模式说明:
默认:在当前的局部坐标系、工具坐标系、机械手属性、ECP坐标系上,向X、Y、Z轴的方向微动动作。 如果是SCARA型机械手,也可以向U方向微动。如果是垂直6轴型机械手,则可以向U方向(倾斜)、V方 向(仰卧)、W方向(偏转)微动。 工具 : 向工具定义的坐标系的方向微动移动。 Local: 向定义的局部坐标系的方向微动移动。 关节 : 各机械手的关节单独微动移动。不是直角坐标型的机械手使用Joint模式时,显示单独的微动 按钮。 ECP : 在用当前的外部控制点定义的坐标系上,微动动作。
1)单击“项目”,选择“打开”,打开下图图所示窗口
选择文件存储目录
单击“打开”打开 一个项目
微动按钮
输入点标签(可省略)
选择要示教的点位
单击“示教”进入右 图画面
单击“确定” 25
四、RC+ 7.0软件操作
3) 保存点文件
在“机器人管理器”界面里单击“点数据”,单击“保存”。或者在工具栏单击图 标“ ”也可保存点文件。
单击此图标保存 所有文件
单击“保存” 26
四、RC+ 7.0软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”。设置好IP地址后单击“连接”连接控 制器 。
2024版爱普生4轴机器人培训课件

第二代工业机器人
带有感觉系统的机器人, 如力觉、触觉、视觉等传 感器,实现一定程度的自 适应。
第三代工业机器人
智能型机器人,具有高度 的自适应能力和学习能力, 能够自主完成复杂的作业 任务。
4轴机器人特点及优势
特点
4轴机器人具有结构紧凑、动作灵活、 速度快、重复定位精度高等特点。
优势
相比其他类型的工业机器人,4轴机器 人在空间占用、运动范围、运动精度等 方面具有明显优势,特别适用于对空间 要求较高的场合。
维护保养内容
熟悉机器人的维护保养内容,如清 洁、润滑、紧固等。
注意事项
在进行维护保养时,注意遵守安全 规范,避免因维护不当导致安全事 故。
故障诊断与排除技巧
故障诊断方法 掌握机器人的故障诊断方法,如观察、听声、触摸等。
常见故障及排除方法 熟悉机器人常见的故障及其排除方法,如电气故障、机械 故障等。
图像处理单元
对图像进行预处理、特征提取等操作, 提高图像识别率。
视觉算法
实现物体定位、识别、测量等功能, 支持机器人智能决策。
视觉系统通信
与机器人控制系统实时通信,确保视 觉信息与机器人动作同步。
传感器与视觉系统集成方案
硬件集成
软件集成
将传感器和视觉系统硬件设备与机器人本体 进行集成,实现一体化设计。
采用定量和定性相结合的方法进行评估,确保评估结果的准确性和公正性。
对学员的考核结果进行及时反馈和指导,帮助学员找到自己的不足并加以改进。
持续改进计划制定
根据学员的反馈和考核结果,及 时总结经验和教训,制定持续改
进计划。
对培训计划、课程内容、实战演 练项目等进行不断优化和更新,
以适应行业发展和学员需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Click on “Jog & Teach”
爱普生传送带跟踪培训资料
传送带的示教
移动机械手使之到达part1 teach
爱普生传送带跟踪培训资料
传送带的示教
不要移动传送带和工件 继续Click on “Jog &
Teach”
爱普生传送带跟踪培训资料
传送带的示教
将机械手移动使之到达 Part 2 teach
爱普生传送带跟踪培训资料
概览
传送带类型 硬件触发
直形 / 圆形 / 多传送带 视觉
传感器
触发方式 校正方法
通过软件
通过硬件
视觉传送带校准 (直形) 视觉传送带校准(圆形)
通过硬件
传感器传送带校准 (直形) 传感器传送带校准 (圆形)
爱普生传送带跟踪培训资料
传送带触发方式
软件触发
硬件触发
• 软件触发只需要连接号编码器即可,通过cnv_trigger实现。 • 硬件触发比较简单且可以同时触发相机和传送带,且精度较高。
爱普生传送带跟踪培训资料
传送带的示教
移动机械手使之移动到工件位 置
Teach
爱普生传送带跟踪培训资料
传送带的示教
将工件移动到离下流限前 面一点的地方,不要移动
传送带!
点击 “Jog & Teach”
爱普生传送带跟踪培训资料
传送带的示教
移动机械手使之到达parts位 置
Teach
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
传送带的示教
把两个工件放入相机下方,注意工件的流动方向
点击vision可以查看视觉内的图 像
从左边到右边还是从右边到左 边? 经验做法是:人和机器人 站在同一侧,方向和传送带移
动的方向一致!
Ok后点击 ‘teach’
爱普生传送带跟踪培训资料
传送带的示教
保持parts不动,移动传 送带使parts到达机械手
传送带跟踪系统的类型
• 间隔传送带跟踪
• 传送带根据指定的距离移动并停止,当工件被取走 后,传送带继续移动。
爱普生传送带跟踪培训资料
传送带速 度
不抓取的区域
No pick zone
No pick zone
• 粉红色的区域是传送带加减速的区域 • 该区域传送带不抓取工件,如果命令机器人在该区域抓取精度会很低
爱普生传送带跟踪培训 资料
2020/11/21
爱普生传送带跟踪培训资料
传送带跟踪系统的类型
• 连续传送带跟踪
• 传送带连续移动,机器人从传送带上取走工件。
• 每个传送带有一个编码器连接PG board. • 1个PG board 最多可以支持4个编码器 • 一个系统最大可以支持16个逻辑传送带
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
硬件安装与接线
编码器硬件触发的连接:
使用硬件IO触发编码器脉冲锁存信号,需要接
线到端子板的20Pin,以及给25Pin和50Pin接上外 部24V电源。
爱普生传送带跟踪培训资料
确认编码器的配置
1. 在工具内选择传送带跟踪,点击conveyor 1 2. Encoder内输入1,点击应用 3. 使用 cnv_pulse 命令确认编码是否安装成功
传送带的示教
示教完成,点击完成
爱普生传送带跟踪培训资料
传送带的示教
最后调整Z轴行程
点击 “Adjust Z”
爱普生传送带跟踪培训资料
传送带的示教
将工件放在传送 带上
点击 “Job & Teach”
爱普生传送带跟踪培训资料
传送带的示教
移动机械手使之Z轴到达实际 接触工件
Teach
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
传送带的示教
取一个工件放到传送 带的上流限
Click on “Jog & Teach”手使之到达parts位 置
Teach
爱普生传送带跟踪培训资料
传送带的示教
只移动传送带到下流限位 置,不要移动工件 !
点击 “Jog & Teach”
传送带的示教
选择vision、 straight和 level
如果传送带安装倾斜,选择tilted
爱普生传送带跟踪培训资料
传送带的示教
设置工件之间最小距离, 防止工件重叠 也可以使用
Cnv_QueReject 命令
爱普生传送带跟踪培训资料
传送带的示教
选择之前的 cnv_calib序列
点击“Calibrate” 开始示教步骤
2、打印一个标准的九点图,放入视觉范围内 。如图:
爱普生传送带跟踪培训资料
注意选择standalone
爱普生传送带跟踪培训资料
视觉软件校准
建立blob对象,number 改成9个
9
爱普生传送带跟踪培训资料
视觉软件校准
3、点击calibration后,得到下图结果:
通常结果值要小于 1方可接受
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
视觉硬件接线_RC620
视觉处理卡出来的BNC接头(OPTO trigger)通过一个 同轴电缆,并外接一个4.7千欧的电阻,连接控制器IO输出。
通过IO信号来触发视觉抓取工件。 Terminal block的20pin 也同时接到该IO pin脚,用于触发
传送带。
爱普生传送带跟踪培训资料
传送带跟踪流程图
开始
开始
工件抓走 了吗?
抓取区域 内还有工 件吗?
添加到队列
队列
从对列中抓走
爱普生传送带跟踪培训资料
样例程序
爱普生传送带跟踪培训资料
样例程序
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
放弃跟踪
• 当工件在传送带上从抓取区域流到下流限 区域后,放弃跟踪该工件
爱普生传送带跟踪培训资料
Downstream Limit设置
• 尽量将downstream limit设 置靠近pick up区域位置。
• 当开始抓取时, Downstream limits取决于传 送带速度和机械手的位置。
爱普生传送带跟踪培训资料
斜线的Upstream/Downstream Limits
视觉软件校准
4、新建一个findparts序列 5、将工件放入视觉区域,建立几何图形对象
爱普生传送带跟踪培训资料
传送带的示教
1、新建一个cnv_calib序列,建立blob对象,根据 传送带流动方向,建立blob1和blob2,如图:
爱普生传送带跟踪培训资料
传送带的示教
2、配置传送带
爱普生传送带跟踪培训资料
• 减少机械手等待时间,增加上流区域。 • 减少工件missing的可能性。
爱普生传送带跟踪培训资料
传送带相关程序指令
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
3rew
演讲完毕,谢谢听讲!
再见,see you again
2020/11/21
爱普生传送带跟踪培训资料
爱普生传送带跟踪培训资料
硬件安装与接线
每个传送带都必须安装编 码器。 每个编码器需要与PG板连 线。(脉冲发生板) 通过触发脉冲输入可以获 得编码器的当前位置脉冲, 机器人即可知道传送带位
置,实现跟踪。
爱普生传送带跟踪培训资料
硬件安装与接线
编码器的连接:
PG板有100个pin脚,分两个50个 pin脚的终端接口(terminal block) 编码器的四根信号线A+、A-、B+、 B-需要接到block 1的10、11、12、 13pin脚,另外编码器的5v电压也 需要接到外部5V直流电压源。
爱普生传送带跟踪培训资料
多传送带
• 一个传送带,多个robots • 多个传送带,多个robots
爱普生传送带跟踪培训资料
多传送带系统架构
爱普生传送带跟踪培训资料
抓取区域
爱普生传送带跟踪培训资料
Upstream Limit设置
• 直到工件到达Upstream limit时,Robot才 开始pick up。为了减少robot的等待时间, 可以把Upstream limit设置到最上流的区域。
软件界面配置
• 打开RC+ 6.0软件,选择Select “Setup | System Configuration | Conveyor Encoders”,添加编码器设置。
爱普生传送带跟踪培训资料
视觉软件校准
• 在进行传送带示教前先进行视觉的配置和校 准,然后再进行传送带的配置和校准。
1、工具栏上点击 按钮,进入视觉图像界面 ,新建一个序列。比如叫cam_calib。
打开传送带电机,运行上述程序, 编码器脉冲值不断变化,说明ok。
爱普生传送带跟踪培训资料
视觉硬件接线_RC620
(1) 连接相机的电缆 (2) 连接视觉处理卡出来的BNC接头的Exp 1到视觉 box的trig接口 (3) 视觉处理卡出来的BNC video接头连接视觉box 的video 1接口