§8,刚体的平面平行运动
刚体的自由度和平面平行运动

J
C
2
刚体的动能等于质心的平动动能与对质心的转动
动能之和。
刚体的平面平行运动
例题4-9 讨论一匀
y
N
质实心的圆柱体在斜
O
x
面上的运动。
fr r
解 圆柱体所受的力共有三个: 重力G ,斜面的支承力N 和
aCx
G=mg
摩擦力f r,如图所示。设圆柱体的质量为m,半径
为r,那么,它对其几何的转动惯量
JC
1 mR2 2
aC
F
联立以上四式,解得
刚体的平面平行运动
aC
2F(R l) 3mR
f R 2l F 3R
由此可见
l<r/2, f>0, 静摩擦力向后 l>r/2, f<0, 静摩擦力向前 l=r/2, f=0
刚体的平面平行运动
aC
2F(R l) 3mR
f R 2l F 3R
J 1 mr 2 2
刚体的平面平行运动
我们取和斜面平行而向下的方向为x轴的方向,和 斜面垂直而向上为y轴的方向
这样可得
maCx mg sin fr
maCy N mg cos J frr
以上三式中,aCx和aCy是圆柱体质心在x轴和y轴方
向的加速度,是圆柱体对其通过质心的几何轴转
车轮上任意一点的速度
v vC r
G点的速度
vG vC r 0
B点的速度
vB vC R 2vC
A点的速度
vA vC2 (R)2
RA
A
2vC
B
RB
RB
RA RG vC
刚体的平面运动
瞬时针方向
例2: 图示椭圆规。已知 :AB =l=20㎝, vA=20㎝/s,φ=30°, C为杆AB的中点。试求 :vB 、ωAB 、 vC 。
解: (1)分析各刚体的 运动,选取研究对象
选取AB作为研究对 象
(2)分析与AB连接点的运 动,选取运动已知的点 为基点
选A点 —— 基点(A点 运动已知)
解
(1)分析运动,确定基点。轮I做平面 运动,O点加速度可求,选其作为 基点。
(2)基点O的速度、加速度、轮I角速度
vo L 1,ao L12
vo r
L r
1
(3)求B点的加速度
aB ao aτBo aBno
v0
aτBo 0
aBno
r 2
L2 r
12
aB
ao2
aBnO
2
L1
1
vB= vA+ vBA
大小: ? ? 方向: (4)由三角关系求出所求量。
vA A r 900
o
l
vA
B
vB vBA
vB
vBA
vc
vCA
vA
B vA
AB
C vA
A
y
vB
vr =vBA
y'
r'B B
ve =vA
vA S
A
x'
0
x
1、定义
第三节 速度投影定理
平面图形上任意两点的速度在该两点连线上的投影相 等。——速度投影定理
vC vA2 vC2A 2vA vCA cos vA2 (AB l / 2)2 2vA (AB l / 2) cos
20(cm / s)
刚体的进动与平面平行运动课件

03
刚体的进动和平行运动 的关系
进动与平面平行运动的联系
进动和平行运动都是刚体在旋 转运动中的表现形式。
进动和平行运动都涉及到刚体 的旋转轴和旋转角度的变化。
进动和平行运动在某些情况下 可以相互转化,例如在陀螺的 旋转运动中。
进动与平面平行运动的区别
进动是刚体绕自身旋转轴的旋转运动,而平面平行运动是刚体绕一个固定点的旋转 运动。
为$x - x_0$和$y - y_0$。
平面平行运动的速度计算
总结词
速度是描述刚体在平面平行运动中位置 变化的快慢程度,可以通过位移量和时 间的变化计算得出。
VS
详细描述
在平面平行运动中,速度可以通过位移量 和时间的变化计算得出。假设刚体在$t$ 时刻的位移量为$(x, y)$,经过的时间为 $Delta t$,则速度$v_x$和$v_y$分别为 $frac{Delta x}{Delta t}$和$frac{Delta y}{Delta t}$。
04
刚体进动的计算方法
进动角速度的计算
总结词
进动角速度是描述刚体绕自身轴线旋 转的角速度。
详细描述
进动角速度的计算公式为ω=IωIomega = IomegaIω=Iω,其中IWIW是刚体的 转动惯量,ωomegaω是刚体的旋转角 速度。通过已知的转动惯量和旋转角速 度,可以计算出进动角速度。
进动周期的计算
刚体进动的条件
刚体的质量分布相对 于转轴是不均匀的, 即存在质量偏心。
刚体的自转轴线在惯 性空间中是进动的旋 转轴。
刚体受到一个与自转 轴线不重合的外力矩 作用。
刚体进动的特点
进动的角速度矢量与外力矩矢量 成正比,即M=k×w,其中M为 外力矩,w为角速度,k为转动
理论力学刚体的平面运动

车轮的平面运动
刚体的平面运动可以 分解为随基点的平动 和绕基点的转动.
随基点A的平动
绕基点A'的转动
平面图形S在t时间内从位置I运动到位置II
以A为基点: 随基点A平动到A'B''后, 绕基点A'转 1角到A'B' 以B为基点: 随基点B平动到A''B'后, 绕基点B'转 2 角到A'B' 图中看出:AB A'B'' A''B' ,1 2 于是有
3
vC vB vCB
大小 ? l l 2
方向 ?
vC vB2 vC2B 1.299 m s 方向沿BD杆向右
例3 曲柄连杆机构如图所示,OA =r, AB= 3。r 如曲柄OA以匀角速度ω转动。
求:当 60,0,90时点B的速度。
已知:OA r, AB
求:当机构在图示位置时,夹板AB的角速度。
已知:AB 600mm, OE 100mm, 10 rad s , BC GD 500mm, 求:
AB
解: 1 杆GE作平面运动,瞬心为 C1
OG 800mm 500mm sin 15 929.4mm
EC1 OC1 OE 3369mm
解: 1 AB作平面运动。
vB AB vA
vB cos 30 OA
OA
vB cos 30 0.2309 m s
已知
求
OA
vE
100mm,OA
2
rad
s
, CD
3CB, CD
第八章刚体的平面运动
其中,i ,j 为x,y 轴的单位矢量。
14
2. 速度投影定理
同一平面图形上任意两点的速度在这两点连
线上的投影相等。
证明:
vB =vA +vBA
vBA vB
∵(vB )AB= (vA )AB+ (vBA) AB
A
B
vA
vA
而vBA 垂直AB,在AB两点连线上的投影为零
∴ (vB )AB= (vA )AB
O
30 A 60 60 B vB 已知方向,可求出连杆CB的速度瞬
vA
心Cv2。
36
例题
刚体的平面运动
例题8
因为
CCv2 CB tan 30
3l 3
故得连杆CB角速度的大小
C
Cv2
Cv1
vC
CB
vC CCv 2
3 l
vA
它的转向沿逆时针。于是滑块B 速
度的大小为
O
30 A
vA
60 60 B vB
M3和M4各点的加速度大小。
39
例题
刚体的平面运动
例题9
解: 因在此瞬时O点的加速度是已知的,
M3
故选O点为基点,则齿轮节圆边缘上任一
点M 的加速度为:
aO vO M4
M2
RO
a O
因为任一瞬时齿轮的角速度 vO ,
R
M1
因此,可对此式求导数,从而求得齿轮
的角加速度
O
ψ
A vB
vA=u
vB
u
tan
,
vBA
u
sin
,
所以
AB
vBA l
u l
08-理论力学-第二部分运动学第八章刚体的平面运动

形S在该瞬时的位置也就确定了。
88
运动学/刚体的平面运动
四、平面运动的分解 ——平移和转动
当图形S上A点不动时,则
刚体作定轴转动 。
当图形S上 角不变时,
则刚体作平移。
故刚体平面运动可以看成是 平移和转动的合成运动。
例如:车轮的平面运动可以看成: 车轮随同车厢的平移 和相对车厢的转动的合成。
99
2121
如图示平面图形,某瞬时速度瞬心为P点, 该瞬时平面图形内任一点B速度大小
vB vP vBP vBP
B
大小:vB BP
方向:BP,指向与 转向相一致。
vB
S
vA
C
vC
同理:vA=ω·AP, vC=ω·CP
由此可见,只要已知图形在某一瞬时的速度瞬心 位置和角速度 ,就可求出该瞬时图形上各点的速度。
的平面Ⅱ内的运动。
66
运动学/刚体的平面运动
二、平面运动的简化 刚体的平面运动可以简化为
平面图形S在其自身平面内的运动。 即在研究平面运动时,不需考虑 刚体的形状和尺寸,只需研究平 面图形的运动,确定平面图形上 各点的速度和加速度。
三、平面运动方程 为了确定代表平面运动刚体的
平面图形的位置,我们只需确定平 面图形内任意一条线段的位置。
vBA
s
B
vB vA
A
vA
方向: AB, 指向与 转向一致。
即:平面图形上任一点的速度等于基点的速度与该点随
平面图形绕基点转动的速度的矢量和。 ——基点法
基点法是求解平面图形内一点速度的基本方法。 1414
运动学/刚体的平面运动
二、速度投影法
由于A, B点是任意的,因此
工程力学 第八章 刚体的平面运动
例8.1.曲柄连杆机构OA=AB=l,曲柄OA以匀 转动。 求: 当 =45º 时, 滑块B的速度及AB杆的角速度。 a.基点法; b.速度投影法 解:机构中,OA作定轴转动, AB作平面运动,滑块B作平移。
基点法
研究 AB,以 A为基点, 且 v A l , 方向如图示。 根据
vB vA vBA ,
va ve vr vB vA vBA
所以,任意A,B两点,若A为基点,则:
v
B
v
A
v
BA
v
B
v
A
v
BA
平面图形内任一点的速度等于基点的速度与该点随图形绕 基点转动速度的矢量和。这种求解速度的方法称为基点法.
其中
vBA
大小
vBA AB
方向垂直于 AB ,指向同
2 l ( )
在B点做速度平行四边形,如图示。
vB v A / sin l / sin 45 vBA v A /tg l / tg 45 l AB vBA / AB l / l
(
)
速度投影法
研究AB, vA l ,
方向OA, vB方向沿BO直线
因此,图形S 的位置决定于x A , y A , 三个独立的参变量.
平面运动方程
x A f1 (t ) yA f2 ( t ) f 3 (t )
1)当图形S上A点固定不动,则刚体将作定轴转动; 2)当图形S上角不变时( =常数),则刚体将作平移。
故刚体平面的运动可以看成是平移和转动的合成运动。
根据速度投影定理 vB AB vA AB
vB sin vA
vB v A / sin l / sin 45 2l( )
刚体的平面平行运动
轴为动坐标轴(o-xyz),则
J I1xi I2y j I3zk
23
J I1xi I2y j I3zk
计算第一项的导数: d
dt
dJ dt
J
x
i
J y
j
(I1xi )
J
z
k
I1I1xdidt xIi1x
J
I1x (
di dt i)
dJ x dt
i
(J
xi )
I1
x
i
I2 y
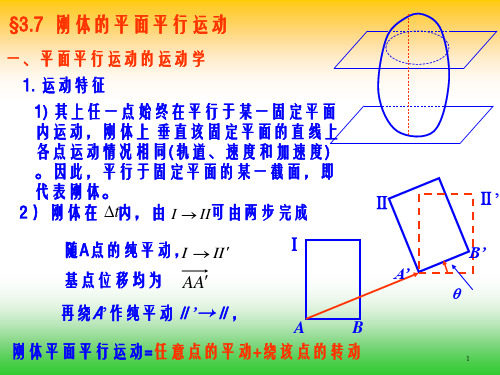
Ⅰ
基点位移均为 AA
A’
再绕A’作纯平动Ⅱ’→Ⅱ,
A
B
刚体平面平行运动=任意点的平动+绕该点的转动
Ⅱ’ B’ θ
1
2. P点的速度
建立固定系0xyz和固连系0x'y'z'.取A为基点:
独v立p 变量ddrt:
xA,
dyA(,rA dt
r ' )
vA
r
P点在固定系和固连系中的坐标为(x,y)
和(x’,y’),其速度在固定系中的投影
20
例2 当飞机在空中以定值速度V沿半径为R的水平圆形轨道C转弯
时, 当螺旋浆尖端B与中心A的联线和铅垂线成角时, 求B点的速度
及加速度. 已知螺旋桨的长度AB=l, 螺旋桨自身旋转的角速度为1.
解:
1 j
V R
k
v Vj r '
Vj
1
j
V R
k
l sini
l cosk
1l
解:选取坐标系如图,
yωN
mxC f
N mg 0
2 5
mR
2
fR
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§8、刚体的平面平行运动
一、基本动力学方程:
在运动学部分我们已经讲过,刚体的平面平行运动可以看作随任意选定的基点的平动和绕通过基点的垂直轴的转动。
但是在讨论动力学问题时,对基点的选取就不能这样随心所欲了。
通常选质心为基点,而将刚体的平面平行运动分解为随质心的平动和绕质心的转动。
质心在运动平面上的运动状况只要用两个质心坐标x c 、y c 就能确定;刚体绕质心且垂直于运动平面的转动轴的转动可以用一转过的角度θ来表示。
因此,在动力学中确定刚体平面平行运动的三个自由度通常就是,x c 、y c 和θ这三个量。
平面平行运动的动力学基方程所要确定的就是外力及外力矩与x c 、y c 、θ这三个量的关系。
应用质心运动定理很容易得到,确定质心
的运动规律的动力学方程是:∑=外ix c F x m ;∑=外iy c
F y m ,再应用质心动量矩定理可以得到,确定刚体绕通过质心且垂直于运动平面的轴线而转动的动力学议程为:∑=外ic c
c M I θ [等于作用于刚体上的所有外力对质心c 的力矩的代数和]其中的I c 是刚体对通过质心且垂直于运动平面的转轴的转动惯量。
这三个方程就是解决刚体平面平行运动的动力学问题的基本方程。
对刚体的平面平行运动问题的求解,我们尽量用这1、三个基本方程的方法来解决。
2、由于三个基本方程只能解三个未知量,如果所求的问题,它的未知量要是多于三个的话,这时我们还得根据几何约束的情况,找出约束关系。
平面平行运动的约束关系,一般来说有平动和转动的关系。
除了应用上面这三个基方程之外,有时也可配合应用动能定理和机械能守中定律。
二、动能定理、机械能守恒律:
由柯尼希定理可得,刚体平面平行运动时的动能就等于质心的运动动能+刚体绕质心的转动动能:222222*********w I y m x m w I mv T c c c c c ++=+=。
由刚体动能定理的一般表达式:外dW dT = 可得平面平行运动刚体的动能定理的具体表达式为:外dW w I y m x m d c c c =++)2
12121(222 如果作用在刚体上的所有力为有势力dV dW -=外,或者无势力不做功,则d(T+V)=0因此可得平面平行刚体的机械能守恒式为:
const E V T ←=+,即:E V I mv c c =++222
121ω。
应用这种方法求解的主要优点是:由于不做功的力在方程中不出现,∴可避免考虑那些不做功的约束力,另外计算时可以少积一次分而简单些。
但是这些优点也正好是它的缺点,无法由它求出不做功的力,而上面的第
一种解法不仅弥补了这一缺点,而对所有的力以及力矩都能在方程中出现,所以第一种方法比较基本和完备。
而第二种方法只是一种辅助性的方法。
在实际应用中,要视具体情况来选用。
例1、有一条不可伸长的轻绳一端固结在天花板上,另一端缠
着一个半径为r ,重为p 的滑轮。
求滑轮中心即圆心下降的加
速度。
这个例子很简单,大家可以一下子就解出它的结果。
不过
举这个例子的主要目的不是只为解出它的结果,而是为了说明
方法的问题。
在这个问题中,我们当然就取滑轮为对象,并将
它视为刚体,而作平面平行运动。
解法一、现在先用基本方程来解这个问题。
为此我们取垂直向
下的方向为x 轴的正向。
计算力矩时取顺时针方向为正,作用在研究对象上的外力有↓和绳子对它作用的↑张力。
研究对象只受有这两个外力的作用。
由此分析我们马上可以列出它们微分方程为:Tr r g
p T p x g p c =-=θ )21(;2两个方程三个未知量,方程数目不够,还得靠约束关系再找一个方程。
∵滑轮是作纯滚动的。
∴c x r =θ
解这三个方程就能得到圆心下降的加速度g x c 3
2= 。
解法二、这个题目能不能用机械能守恒来做呢?可以的,因为研究对象所受的两个力中,重力是有势能的,而张力T 又是不作功的。
所以根据机械能守恒定律可得:const px r g
p x g p c c =-+222)21(2121θ [这里取坐标原点0为零势点。
∴刚体的重力势能为c px -]为了求出加速度,我们可以将上式两边对t 求导一次得:0212=-+c c c x p r g
p x x g p θθ、c c x r x r ==θθ,再加上两个约束关系就可解得同样的结果。
解法三:除了上面两种解法之外,还有没有第三种解法呢?[请学生来回
答和做,然后再进行讲解]。
利用瞬时转动中心即瞬心的办法来做。
由于滑轮
作纯滚动,绳子与滑轮的相切点A 就是瞬时转动中心,,那么对瞬心也应该有转动方程为:pr r g p I c =+ω )(2∵221r g
p I c = ∴pr r g p r g p =+ω )21(
22 → pr r g p =ω 223∴r g 32=ω 则由约束关系可得g r x c 3
2==ω 。
得到的结果与上面两种解法得到的结果完全一样。
但是这种方法不能学,对大家来说不学这种方法为好。
因为容易出差错,∵它往往是偷换了概念,是懂非懂在没有把原来的基本概念搞清楚,自以为是地认为:由于瞬心坐标系就是静止坐标系。
∴它是惯性系,即然它是惯性系,那么,质点组的动量矩定理对它仍然成立∴就有瞬心这样的转动方程
∑=外瞬瞬M I ω
,∴可以这样做的。
这种说法是错误的,他对基本概念的理解可以说是模糊的,在这个例子中采用这种方法虽然是做对了,对有些题目是可以这样做的,但它不是普通适用的,而是有条件的,其条件是常数=ρ,ρ是两平行轴间的垂直距离即瞬心与质心之间的距离。
可不可以用这种方法做,必须要加以证明,方可确定。
这次课就这一个例子,下次再举一个例子让大家动手来做。
例子2、如图所示的装置,称它为“复摆”,至于怎样称呼对求解问题是无关紧要的,而要紧的是如何把题目的含意弄明白,否则就谈不上解题了。
已知此“复摆”上端的两个轮子的半径等
于r ,它们可在水平导轨上运动。
还已知此“复
摆”的总质量为m ,质心c 到上端两轮的轴线
oc 的距离为 。
即 =oc ,“复摆”绕质心的
回转半径为R 。
并假设上端两轮在导轨上的运
动是纯滚动。
让我们求此“复摆”偏离平衡位
置作振动的周期。
要求它的振动周期,当然得
先找出它的运动方程,然后才能解出它所要求
的结果。
至于后面如何解出最后的结果,我们
现在当然是无法去想得一清二楚的,至少要等到运动方程列出之后才能考虑。
现在我要求大家只要列出足以求解这个问题的方程就可以了,当然其中也包括约束方程在内。
解:先提示一下,要注意:这里的“复摆”不是通常绕固定轴转动的复摆,为了便于我
们研究,画出它的平面图如下图所示的这种情形。
这样就很容易看出该“复摆”所作的运动是平面平行运动。
下面应该先建立坐标系,然后列出足以求解问题的方程。
<1>建立惯性直角坐标系:以其平衡时,也就
是摆在垂直位置时上端两个轮子的中心o 为平面
直角坐标系的原点,ox 轴水平向右,oy 轴垂直向
下,并规定摆转过的角度θ以逆时针方向为正,质
心坐标就用(x c,y c )表示。
当然我们应该以“复摆”
摆到某一任意位置,即如左图虚线所画的位置来考
虑列出它在该任意位置的方程。
对摆进行受力分析
可知它所受的外力有:<2>受力分析:↓的重力
g
m ,还有导轨给两个轮子的法向反作用力↑N ,由于两个轮子在导轨上是作纯滚动的,两轮所受的
摩擦力是静摩擦力,设静摩擦力的方向是水平向左的,除此之外,再也没有别的外力了。
<3>列方程
F x
m c -= N mg y
m c -= )cos (sin 2r F N mk -+-=θθθ
现在三个方程都有x c ,y c ,θ,N,F 这五个未知量,∴还得找两个约束关系式,从图上可以直接看出y 方向的约束关系为:θcos =c y ,在x 方向的约束关系为:'sin oo x c -=θ ∵两轮在导轨上是作纯滚动的,∴根据纯滚动的几何约束关系知θr oo =',∴θθr x c -=s i n 。
五个方程,五个未知量当然足以求解了。
关于它的解在这里不做了,留给大家课外去做。
通过对这个例子建立足以求解问题的方程的分析和建立方程可以看到这样一个重要问题:如何找出约束关系是解决刚体平面平行运动动力学问题的关键。
题目的难易程度,往往在于约束关系的简单或复杂的程度。
有些题目很难做,它主要难在约束关系难找。
约束关系它不仅有平动和转动的关系,还有几何约束关系,运动约束关系等等,随着不同的物体有很多的变化。
因此,我们在找约束关系时,思路要开阔,不要局限于只在某一个方面去找。
刚体平面平行的题目很多, ………..。