实验报告:脉冲宽度调制器PWM
延时输出pwm实验报告

延时输出pwm实验报告1. 实验目的本实验旨在通过使用延时输出脉冲宽度调制(PWM)信号,控制LED灯的亮度,并进一步了解PWM的工作原理和应用。
2. 实验器材和材料- Arduino开发板- LED灯- 220Ω电阻- 面包板- 连接线3. 实验原理PWM是一种通过改变脉冲信号的占空比来控制电气设备的一种方法。
使用Arduino开发板上的PWM输出引脚可以调整输出脉冲的高和低电平时间,从而控制LED的亮度。
PWM信号的频率一般是固定的,高电平持续时间和低电平持续时间比例的变化来控制电器设备的工作状态。
在Arduino中,可用的PWM输出引脚有特殊标志,如“~3”、“~5”、“~6”、“~9”、“~10”和“~11”。
4. 实验步骤步骤1:硬件连接1. 将Arduino开发板连接到电脑上,并打开Arduino IDE软件。
2. 将LED的正极连接到Arduino的PWM输出引脚(例如,引脚9),将LED 的负极连接到电阻,然后将电阻的另一端连接到Arduino的地(GND)引脚。
步骤2:编写程序在Arduino IDE中编写以下程序:cppconst int ledPin = 9; PWM输出引脚void setup() {pinMode(ledPin, OUTPUT); 设置LED引脚为输出模式}void loop() {analogWrite(ledPin, 128); 设置PWM输出信号的占空比为50%delay(1000); 延时1秒analogWrite(ledPin, 0); 设置PWM输出信号的占空比为0%delay(1000); 延时1秒}步骤3:上传程序将开发板通过USB线缆与电脑相连,并点击Arduino IDE菜单中的“上传”按钮,将程序上传至开发板。
步骤4:观察实验结果LED灯应该开始闪烁,并且每隔1秒变亮一次。
5. 实验结果及分析经过实验,我们成功地使用延时输出PWM信号控制了LED灯的亮度。
PWM脉冲宽度调制分析
PWM脉冲宽度调制分析PWM(Pulse Width Modulation)是一种用来调节模拟信号的数字技术。
通过改变脉冲的宽度,可以实现对信号的调节和控制。
PWM技术在很多领域都有广泛的应用,比如电力电子、通信技术、控制系统等。
PWM脉冲宽度调制的基本原理是通过调整脉冲信号的高电平时间和低电平时间来控制输出功率。
在周期T内,将一个周期中的高电平时间占空比定义为Duty Cycle,通常用百分比表示,即D=(Thigh/T)*100%。
通过改变Duty Cycle的大小,可以改变输出信号的幅度,从而实现对模拟信号的调节和控制。
PWM技术的优点是输出信号幅度可调,抗干扰能力强,而且实现简单、成本低廉。
因此,PWM技术在很多领域都有广泛的应用。
比如,在电力电子领域,PWM技术广泛应用于直流电源变换器、交流变频器、逆变器等电力电子设备中,用来实现对电力信号的控制和调节。
在通信技术领域,PWM技术可以用来实现数字调制,比如在脉冲编码调制(PCM)和数字调制解调器(DMD)中都可以使用PWM技术。
在控制系统领域,PWM技术可以用来实现数字控制和解码,比如在数字控制器和逻辑控制系统中都可以使用PWM技术。
在电力电子领域,PWM技术主要应用于直流电源变换器(DC-DC Converter)、交流变频器(AC-DC Converter)、逆变器(Inverter)等电力电子设备中。
这些设备主要用于电力转换和控制,实现对电力信号的调节和控制。
其中,逆变器是PWM技术应用最广泛的一种电力电子设备,主要用来将直流电源转换为交流电源,实现对交流电源的调节和控制。
在逆变器中,PWM技术被广泛应用于输出端的控制。
逆变器的输出端通常是由一组功率晶体管组成的全桥逆变器电路。
通过改变这些功率晶体管的导通与关断,可以实现对输出交流电源的调节和控制。
而PWM技术则可以通过改变脉冲信号的高低电平时间比,控制功率晶体管的导通与关断,从而实现对输出电源的调节和控制。
单片机PWM(脉冲宽度调制)原理与实现
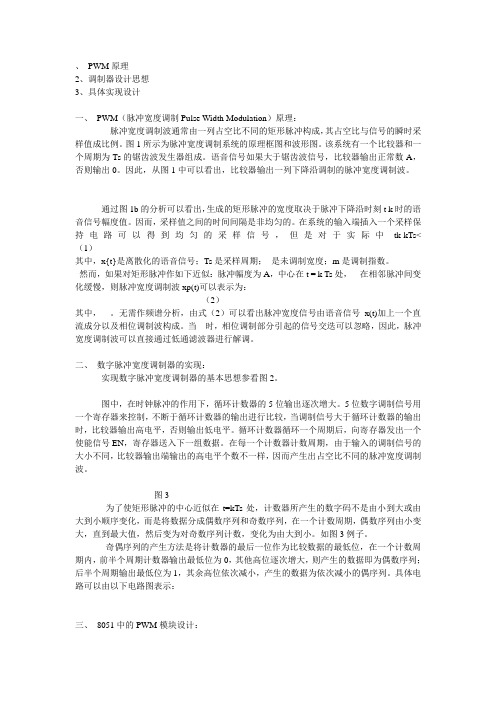
、PWM原理2、调制器设计思想3、具体实现设计一、PWM(脉冲宽度调制Pulse Width Modulation)原理:脉冲宽度调制波通常由一列占空比不同的矩形脉冲构成,其占空比与信号的瞬时采样值成比例。
图1所示为脉冲宽度调制系统的原理框图和波形图。
该系统有一个比较器和一个周期为Ts的锯齿波发生器组成。
语音信号如果大于锯齿波信号,比较器输出正常数A,否则输出0。
因此,从图1中可以看出,比较器输出一列下降沿调制的脉冲宽度调制波。
通过图1b的分析可以看出,生成的矩形脉冲的宽度取决于脉冲下降沿时刻t k时的语音信号幅度值。
因而,采样值之间的时间间隔是非均匀的。
在系统的输入端插入一个采样保持电路可以得到均匀的采样信号,但是对于实际中tk-kTs< (1)其中,x{t}是离散化的语音信号;Ts是采样周期;是未调制宽度;m是调制指数。
然而,如果对矩形脉冲作如下近似:脉冲幅度为A,中心在t = k Ts处,在相邻脉冲间变化缓慢,则脉冲宽度调制波xp(t)可以表示为:(2)其中,。
无需作频谱分析,由式(2)可以看出脉冲宽度信号由语音信号x(t)加上一个直流成分以及相位调制波构成。
当时,相位调制部分引起的信号交迭可以忽略,因此,脉冲宽度调制波可以直接通过低通滤波器进行解调。
二、数字脉冲宽度调制器的实现:实现数字脉冲宽度调制器的基本思想参看图2。
图中,在时钟脉冲的作用下,循环计数器的5位输出逐次增大。
5位数字调制信号用一个寄存器来控制,不断于循环计数器的输出进行比较,当调制信号大于循环计数器的输出时,比较器输出高电平,否则输出低电平。
循环计数器循环一个周期后,向寄存器发出一个使能信号EN,寄存器送入下一组数据。
在每一个计数器计数周期,由于输入的调制信号的大小不同,比较器输出端输出的高电平个数不一样,因而产生出占空比不同的脉冲宽度调制波。
图3为了使矩形脉冲的中心近似在t=kTs处,计数器所产生的数字码不是由小到大或由大到小顺序变化,而是将数据分成偶数序列和奇数序列,在一个计数周期,偶数序列由小变大,直到最大值,然后变为对奇数序列计数,变化为由大到小。
pwm实验报告

pwm实验报告PWM实验报告一、引言脉宽调制(Pulse Width Modulation,PWM)是一种常用的电子技术,用于控制电子设备中的电压和电流。
通过改变信号的脉冲宽度,PWM可以调节电子设备的输出功率,从而实现对电机、灯光等设备的精确控制。
本实验旨在通过搭建PWM电路并进行实际测试,探究PWM技术的原理和应用。
二、实验原理PWM技术通过改变信号的占空比来控制输出信号的电压或电流。
占空比是指脉冲信号中高电平的时间与一个周期的时间之比。
当占空比为0%时,输出信号为低电平;当占空比为100%时,输出信号为高电平;当占空比在0%和100%之间时,输出信号为一个周期内高电平和低电平的交替。
通过调整占空比,可以实现对输出信号的精确控制。
三、实验材料和方法1. 材料:- Arduino开发板- 电阻、电容等基本电子元件- 电机或LED等输出设备- 连接线等实验器材2. 方法:1) 搭建PWM电路:根据实验要求,按照电路图连接电子元件和Arduino开发板。
2) 编写程序:使用Arduino开发环境,编写程序控制PWM输出信号的占空比。
3) 实验测试:将输出设备连接到PWM输出引脚,通过改变占空比,观察输出设备的变化。
四、实验结果和分析在实验中,我们搭建了一个基本的PWM电路,并使用Arduino开发环境编写程序来控制PWM输出信号的占空比。
通过改变占空比,我们观察到输出设备的亮度或转速发生了变化。
在实验过程中,我们发现当占空比较小时,输出设备的亮度或转速较低;而当占空比较大时,输出设备的亮度或转速较高。
这是因为占空比的变化直接影响了输出信号的电压或电流大小,从而改变了输出设备的工作状态。
PWM技术在实际应用中具有广泛的用途。
例如,它可以用于电机控制,通过调整占空比来控制电机的转速和方向;它还可以用于灯光控制,通过调整占空比来调节灯光的亮度;此外,PWM技术还可以应用于电源管理、音频处理等领域。
五、实验总结通过本次实验,我们深入了解了PWM技术的原理和应用。
模拟呼吸灯实验报告(3篇)
第1篇一、实验目的1. 理解并掌握PWM(脉宽调制)技术在模拟呼吸灯中的应用原理。
2. 学习如何使用Arduino开发板和相关硬件实现呼吸灯效果。
3. 通过实验加深对PWM信号控制LED亮度的理解。
二、实验原理呼吸灯是通过控制LED的亮度来模拟呼吸效果的一种装置。
PWM技术是实现这一效果的关键,它通过改变信号的占空比来控制LED的亮度。
当占空比为0时,LED不亮;当占空比为100%时,LED最亮。
通过不断调整占空比,可以实现LED亮度的平滑变化,从而模拟呼吸效果。
三、实验设备1. Arduino开发板(例如Arduino Uno)2. LED灯3. 电阻(220Ω)4. 面包板5. 导线6. 代码编辑器(例如Arduino IDE)四、实验步骤1. 硬件连接:- 将LED灯的正极连接到Arduino开发板的数字输出引脚(例如引脚9)。
- 将LED灯的负极通过一个220Ω的电阻连接到Arduino开发板的GND引脚。
- 将面包板和导线用于搭建电路。
2. 代码编写:- 打开Arduino IDE。
- 编写以下代码:```cpp// 定义LED灯连接的引脚const int ledPin = 9;void setup() {// 设置引脚模式为输出pinMode(ledPin, OUTPUT);}void loop() {// 从暗到亮for (int i = 0; i <= 255; i++) {analogWrite(ledPin, i); // 设置PWM占空比为i delay(10); // 延时10毫秒}// 从亮到暗for (int i = 255; i >= 0; i--) {analogWrite(ledPin, i); // 设置PWM占空比为i delay(10); // 延时10毫秒}}```3. 编译并上传代码:- 在Arduino IDE中编译代码,确保没有错误。
实验三:PWM信号发生器
实验三:PWM信号发生器1.实验目的(1)学习Quartus II 8.0 软件的基本使用方法。
(2)学习GW48-CK EDA实验开发系统的基本使用方法。
(3)学习VHDL程序中数据对象,数据类型,顺序语句和并行语句的综合使用。
2.实验内容设计并调试好一个脉宽数控调制信号发生器,此信号发生器是由两个完全相同的可自加载加法计数器LCNT8组成的,它的信号的高低电平脉宽可分别由两组8位预置数进行控制。
3.实验条件(1)开发软件:Quartus II 8.0。
(2)实验设备:GW48-CK EDA实验开发系统。
(3)拟用芯片:EPM7128S-PL84。
4.实验要求(1)画出系统原理框图,说明系统中各主要组成部分的功能。
(2)编写各个VHDL源程序。
(3)根据系统功能,选好测试用例,画出测试输入信号波形或编好测试文件。
(4)根据选用的EDA实验开发装置编好用于硬件验证的管脚锁定表格或文件。
(5)记录系统仿真、逻辑综合及硬件验证结果。
(6)记录实验过程中出现的问题及解决办法。
5.实验过程(1)PWM即脉冲宽度调制,就是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
PWM从处理器到被控制系统信号都是数字式的,无需进行数/模转换。
让信号保持为数字形式可将噪声影响降到最小,因此广泛应用在测量、通信和功率控制与变换的许多领域中。
下图是一种PWM信号发生器的逻辑图,此信号发生器是由两个完全相同的可自加载加法计数器LCNT8组成的,它的输出信号的高、低电平脉宽可分别由两组8位预置数进行控制。
如果将初始值可预置的加法计数器的溢出信号作为本计数器的初始预置值加载信号LD,则可构成计数器初始值自加载方式的加法计数器,从而构成数控分频器。
图中D 触发器的一个重要功能就是均匀输出信号的占空比,提高驱动能力,这对驱动,诸如扬声器或电动机十分重要。
(2)VHDL源程序①8位可自加载加法计数器的源程序LCNT8.VHD--LCNT8.VHDLIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY LCNT8 ISPORT(CLK,LD:IN STD_LOGIC;D:IN INTEGER RANGE 0 TO 255;CAO:OUT STD_LOGIC);END ENTITY LCNT8;ARCHITECTURE ART OF LCNT8 ISSIGNAL COUNT:INTEGER RANGE 0 TO 255;BEGINPROCESS(CLK)ISBEGINIF CLK'EVENT AND CLK='1'THENIF LD='1'THEN COUNT<=D;ELSE COUNT<=COUNT+1;END IF;END IF;END PROCESS;PROCESS(COUNT)ISBEGINIF COUNT=255 THEN CAO<='1';ELSE CAO<='0';END IF;END PROCESS;END ARCHITECTURE ART;②PWM信号发生器的源程序PWM.VHD--PWM.VHDLIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY PWM ISPORT(CLK:IN STD_LOGIC;A,B:IN STD_LOGIC_VECTOR(7 DOWNTO 0);PWM:OUT STD_LOGIC);END ENTITY PWM;ARCHITECTURE ART OF PWM ISCOMPONENT LCNT8 ISPORT(CLK,LD:IN STD_LOGIC;D:IN STD_LOGIC_VECTOR(7 DOWNTO 0);CAO:OUT STD_LOGIC);END COMPONENT LCNT8;SIGNAL CAO1,CAO2:STD_LOGIC;SIGNAL LD1,LD2:STD_LOGIC;SIGNAL SPWM:STD_LOGIC;BEGINU1:LCNT8 PORT MAP(CLK=>CLK,LD=>LD1,D=>A,CAO=>CAO1);U2:LCNT8 PORT MAP(CLK=>CLK,LD=>LD2,D=>B,CAO=>CAO2);PROCESS(CAO1,CAO2)ISBEGINIF CAO1='1'THEN SPWM<='0';ELSIF CAO2'EVENT AND CAO2='1'THEN SPWM<='1';END IF;END PROCESS;LD1<=NOT SPWM;LD2<=SPWM;PWM<=SPWM;END ARCHITECTURE ART;(3)仿真结果验证PWM.VHD的时序仿真结果(4)逻辑综合结果6.实验总结经过本次实验,我学会了Quartus II 8.0 开发系统的基本操作,并对它有了一定的了解和认识。
PWM控制直流电机实验报告
PWM控制直流电机实验报告PWM 控制直流电机实验一、实验目的1、熟悉PWM调制的原理和运用。
2、熟悉直流电机的工作原理。
3、能够读懂和编写直流电机的控制程序。
二、实验原理:运动控制系统是以机械运动的驱动设备──电机为控制对象,以控制器为核心,以电力电子器件及功率变换装置为执行机构,在自动控制理论的指导下组成的电气传动自动控制系统。
这类系统控制电机的转矩、转速和转角,将电能转换为机械能,实现运动控制的运动要求。
可以看出,控制技术的发展是通过电机实现系统的要求,电机的进步带来了对驱动和控制的要求。
电机的发展和控制、驱动技术的不断成熟,使运动控制经历了不同的发展阶段。
1、直流电机的工作原理:直流电机的原理图图中,固定部分有磁铁,这里称作主磁极;固定部分还有电刷。
转动部分有环形铁心和绕在环形铁心上的绕组。
(其中2个小圆圈是为了方便表示该位置上的导体电势或电流的方向而设置的)。
上图表示一台最简单的两极直流电机模型,它的固定部分(定子)上,装设了一对直流励磁的静止的主磁极N和S,在旋转部分(转子)上装设电枢铁心。
定子与转子之间有一气隙。
在电枢铁心上放置了由A和X两根导体连成的电枢线圈,线圈的首端和末端分别连到两个圆弧形的铜片上,此铜片称为换向片。
换向片之间互相绝缘,由换向片构成的整体称为换向器。
换向器固定在转轴上,换向片与转轴之间亦互相绝缘。
在换向片上放置着一对固定不动的电刷B1和B2,当电枢旋转时,电枢线圈通过换向片和电刷与外电路接通。
当给电刷加一直流电压,绕组线圈中就有电流流过,由电磁力定律可知for(i=5000;i>0;i--);}②键盘中断处理子程序:采用中断方式,按下键,完成延时去抖动、键码识别、按键功能执行。
要实现按住加/减速键不放时恒加或恒减速直到放开停止,就需在判断是否松开该按键时,每进行一次增加/减少一定的占空比。
③显示子程序:利用数组方式定义显示缓存区,缓存区有8位,分别存放各个数码管要显示的值。
通用定时器-PWM实验
通用定时器-PWM实验二、预备知识通用定时器分为四个部分:1、选择时钟2、时基电路3、输入捕获4、输出比较定时器PWM输出主要涉及到定时器框图右下方部分,即输出比较部分时基时钟来源于内部默认时钟。
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
PWM工作过程:每个定时器有四个通道,每一个通道都有一个捕获比较寄存器,将寄存器值和计数器值比较,通过比较结果输出高低电平,实现PWM信号。
PWM输出库函数1、定时器通道初始化-TIM_OC1Init使用PWM需要配置,配置参数对应框图位置如下:1)TIMx_CCMR1寄存器的OC1M[2:0]位,设置输出模式控制器2)TIMx_CCER寄存器的CC1P位,设置输入/捕获通道1输出极性3)TIMx_CCER:CC1E位控制输出使能电路,信号由此输出到对应引脚初始化定时器输出比较通道:void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);TIM_OCInitTypeDef结构体:typedef struct{uint16_t TIM_OCMode; // PWM模式1或者模式2uint16_t TIM_OutputState; // 输出使能OR失能uint16_t TIM_OutputNState; // PWM输出不需要uint16_t TIM_Pulse; // 比较值,写CCRx,可以有次函数uint16_t TIM_OCPolarity; // 比较输出极性uint16_t TIM_OCNPolarity; // PWM输出不需要uint16_t TIM_OCIdleState; // PWM输出不需要uint16_t TIM_OCNIdleState; // PWM输出不需要} TIM_OCInitTypeDef;2、设置比较值函数-TIM_SetCompare1作用:外部改变TIM_Pulse值,即改变CCR的值void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);3、使能输出比较预装载-TIM_OC1PreloadConfig作用:TIM_CCMRx寄存器OCxPE位使能相应的预装在寄存器void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);4、使能自动重装载的预装载寄存器允许位-TIM_ARRPreloadConfig作用:操作TIMx_CR1寄存器ARPE位,使能自动重装载的预装载寄存器void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);5、修改通道极性作用:操作TIMx_CCER的CC1P位,修改通道极性void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);三、实验步骤:PWM输出步骤:1)使能定时器3和相关IO时钟(LED-PB5)使能定时器3时钟:RCC_APB1PeriphClockCmd();使能GPIOB时钟:RCC_APB2PeriphClockCmd();2)初始化IO口为复用功能输出GPIO_Init();GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;3)PB5输出PWM(定时器3通道2),需要部分冲突映射RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//开启AFIO时钟设置GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);//部分重映射4)初始化定时器(重装载值ARR,与分频系数PSC等)TIM_TimeBaseInit();//决定PWM周期5)初始化输出比较参数:TIM_OC2Init();//通道2输出比较初始化6)使能预装载寄存器TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);//定时器3 通道2 7)使能定时器TIM_Cmd();8)不断改变比较值CCRx,达到不同的占空比效果TIM_SetCompare2(); //通道2,改变比较值CCRxTIMER输出PWM实现步骤:1)设置RCC时钟;2)设置GPIO时钟;3)设置TIMx定时器的相关寄存器;4)设置TIMx定时器的PWM相关寄存器。
台灯调光实验报告
一、实验目的本次实验旨在通过实际操作,掌握台灯调光电路的设计与制作方法,了解调光原理,学习如何通过电路调整台灯的亮度,提高实验操作技能,并培养创新设计能力。
二、实验原理调光台灯是通过改变通过LED灯珠的电流来调整亮度的。
常见的调光方法有PWM(脉冲宽度调制)调光和电阻分压调光。
PWM调光通过控制LED灯珠的导通时间来调整亮度,电阻分压调光则通过改变通过LED灯珠的电阻值来调整亮度。
三、实验器材1. LED灯珠2. 电阻3. 电阻箱4. 万用表5. 电池6. 电线7. 电路板8. 焊锡9. 焊锡工具四、实验步骤1. 电路设计:根据实验原理,设计一个简单的PWM调光电路。
电路包括电源、PWM 控制器、LED灯珠和电流控制电路。
2. 元器件准备:准备所需的元器件,包括LED灯珠、电阻、电阻箱、万用表、电池、电线、电路板和焊锡。
3. 电路搭建:按照电路图搭建PWM调光电路。
首先焊接电源和PWM控制器,然后焊接LED灯珠和电流控制电路。
4. 电路调试:使用万用表检测电路的电压和电流,确保电路工作正常。
5. 亮度调整:通过调整PWM控制器输出信号的占空比来调整LED灯珠的亮度。
6. 实验记录:记录实验过程中观察到的现象和数据。
五、实验结果与分析1. 亮度调整效果:通过调整PWM控制器输出信号的占空比,可以有效地调整LED灯珠的亮度。
占空比越大,亮度越高;占空比越小,亮度越低。
2. 电路稳定性:实验过程中,电路工作稳定,没有出现异常现象。
3. 实验误差:实验过程中,由于元器件的精度和焊接质量等因素的影响,存在一定的误差。
六、实验总结1. 掌握PWM调光原理:通过本次实验,掌握了PWM调光原理,了解了如何通过电路调整LED灯珠的亮度。
2. 提高实验操作技能:在实验过程中,提高了电路搭建、调试和故障排除的技能。
3. 培养创新设计能力:在实验过程中,尝试设计了不同的PWM调光电路,培养了创新设计能力。
七、实验展望1. 优化电路设计:在今后的实验中,可以尝试优化PWM调光电路的设计,提高电路的稳定性和效率。
实验PWM电机调速实验报告
PWM电机调速班级:09应电(5)班姓名:学号:0906020122指导老师时间:2011年10月20日目录一、实验名称 (2)二、实验设计的目的和要求 (2)三、预习要求 (2)四、电路原理图 (4)五、电路工作原理 (4)六、 PCB图 (5)七、实验结果 (6)·八、实验中出现的问题以及解决方法 (13)九、实验心得 (13)十、参考文献 (14)十一、元件清单 (14)一、实验名称:PWM电机调速二、实验设计的目的和要求1)学习用LM339内部四个电压比较器产生锯齿波、直流电压、PWM脉宽;2)掌握脉宽调制PWM控制模式;3)掌握电子系统的一般设计方法;4)培养综合应用所学知识来指导实践的能力;5)掌握常用元器件的识别和测试,熟悉常用仪表,了解电路调试的基本方法进一步掌握制版、电路调试等技能。
三、预习要求3.1关于LM339器件的特点和一些参数图3-1 LM339管脚分配图1)电压失调小,一般是2mV;2)共模范围非常大,为0v到电源电压减1.5v;3)他对比较信号源的内阻限制很宽;4)LM339 vcc电压范围宽,单电源为2-36V,双电源电压为±1V-±18V;5)输出端电位可灵活方便地选用;6)差动输入电压范围很大,甚至能等于vcc。
3.2 分析PWM电机调速电路的系统组成原理,画出每一级电路输出的波形1)由1、6、7管脚构成的电压比较器,通过RC积分电路调节可调变阻器R5(203),产生锯齿波图3-2 锯齿波2) 由8、9、14管脚构成的比较器,通过8管脚接入前一个比较器1管脚产生的锯齿波信号与调节R7(103)取样得到的9管脚电压做比较通过比较器14管脚输出的是PWM脉宽图3-3 脉冲波(pwm)3)PWM电机调速电路中有两个三极管,是具有耦合放大作用的4)另外电路中的输入4、5管脚和10、11管脚的两个电压比较器在整个电路中具有欠压保护和过流保护四、电路原理图图4-1 PWM电机调速原理图五、电路工作原理直流电机的PWM调速原理是通过调节驱动电压脉冲宽度的方式,并与电路中一些相应的储能元件配合,改变了输送到电枢电压的幅值,从而达到改变直流电机转速的目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2012-2013学年第二学期)
模拟电子技术课程
项目四脉冲宽度调制器PWM 完成日期:2013年 6 月 6 日
浙江万里学院电子信息学院
项目四 脉冲宽度调制器PWM
PWM :在电路输出频率不变的条件下,通过电压来改变脉冲的占空比。
采用模拟电路实现脉冲宽度调制器的组成框图:
任务1 正弦波振荡电路;任务2 方波-三角波发生电路;任务3 比较器 任务1 正弦波振荡电路;
信号产生电路在不需要外加输入信号的情况下,能自动产生各种周期性的波形。
振荡的条件:
自激振荡:若一个放大器的输入端不接外加的输入信号,而在输出端也会出现某种频率和幅度的波形。
放大器引入正反馈
产生自激振荡 信号产生电路
∑=X X A O ——开环增益 o
f X X B =——反馈系数
起振条件: 组成部分:
(1) 放大电路:能放大信号电压, 提供振荡器能量
1||>AB
(2)反馈电路:在振荡器中形成正反馈满足相位平衡条件和幅度平衡条件。
(3)选频电路:使振荡器在众多的各种频率的信号中,选择所需的振荡频率的信号以满足振荡条件,使振荡器输出单一频率的正弦信号。
(4)稳幅环节:保证振荡器输出稳定且基本不失真的正弦波形。
电路仿真图:
仿真波形图:
电路中各元器件的作用:
电阻R1与电容C1串联、电阻R2与电容C2并联构成的网络称为RC串并联选屏网络;741和电阻R3、R4、R5组成同相比例电路;D3、D4两个三极管起到稳幅作用。
正弦波的频率:
示波器显示的正弦波形:
任务2 方波-三角波发生电路
(1)方波-三角波发生电路由哪两部分组成,各部分起什么作用,概述其工作原理。
三角波和方波的峰峰值计算公式,和哪些参数有关,其频率计算公式,和那些参数有关?
(3)实际电路测量,并与计算值所得的峰峰值和频率比较。
任务3 电压比较器
运放非线性区的特性是什么?
比较器的分类,什么是门限电压?如何计算
总结:脉冲宽度调制器的工作原理,及实际制作过程。
方波-三角波发生电路由同相迟滞比较器和积分器两部分组成,同相迟滞比较器具有滞回特性,即具有惯性,因而也就具有一定的抗干扰能力;积分运算电路可以实现方波-三角波发生电路的波形变换和正弦—余弦的移相功能。
方波-三角波发生电路工作原理:
1)设A1起始状态-+>u u CC o U u =1 A 2反相积分,u o2开始减小
22
12
211O u R R R Ucc R R R u +++=
+
2)u O2继续减小 0==-+u u CC o U u =1 u o2正向增加 CC m o U R R u 2
1
2-
= 22
12
211o CC u R R R U R R R u +++-
=+
3)u O2继续正向增加 0==-+u u CC o U u =1 U o2减小
CC m o U R R u 2
1
2=
2212
211o CC u R R R U R R R u +++=
+
22
12
211o CC u R R R U R R R u +++=
+
4)u O2继续减小 0==-+u u CC o U u =1 u o2正向增加
三角波的峰峰值计算公式:CC pp o U R R U 2
1
22
= 方波的峰峰值计算公式:CC pp o U U 21= 频率计算公式:1
2
04RCR R f =
(3)实际电路测量,并与计算值所得的峰峰值和频率比较。
仿真电路图:
仿真图:
理论三角波峰峰值:
理论方波峰峰值:
理论频率:
示波器显示的三角波:
任务3 电压比较器
(1)运放非线性区的特性是什么?
输出电压高电平U OH 和输出低电平U OL 。
(2)比较器的分类,什么是门限电压?如何计算?
比较器的分类:单限比较器、滞回比较器、窗口比较器;
门限电压:使O u 从H O U 跃变为L O U ,或者从L O U 跃变为H O U 的输入电压称
为阀值电压或门限电压。
即-+=U U 时,发生电平的转换,此时的输入电压为门限电压。
门限电压的计算:
输出电压发生跳变的临界条件-+=u u
0=-u o i u R R R u R R R u 2
11
212+++=
+ 当-+=u u 时所对应的ui 值是阈值,即o i u R R u 2
1
-
= 当CC o U u -=时得上阈值CC TH U R R U 21
=
当CC o U u =时得下阈值CC TL U R R U 2
1
-
= 总结:脉冲宽度调制器的工作原理,及实际制作过程。
工作原理:通过对一系列脉冲的宽度进行调制,来等效地获得所需要的波形(含形状和幅值)。
总电路原理仿真图:
仿真图:
实际制作过程:
根据电路原理图焊接电路,焊接完成后,分别测量三角波、方波、正弦波的输出波形,并测量各波形峰峰值和频率,并进行比较,实验结果和理论值存在一定的误差,但误差不是很大,结果能明显地出来,焊接过程比较顺利。
实际焊接板:
示波器的第四级输出波形:。