6.5自由变形(FFD)技术
基于 FFD 技术的民用运输机翼尖装置设计研究
西 北 工 业 大 学 学 报
J o u r n a l o f No r t h w e s t e n r P o l y t e c h n i c l a Un i v e r s i t y
Au g. 2 01 5
第3 3 卷第 4期
Vo1 . 3 3 No . 4
延伸” 、 “ 涡扩散器” 和“ 双叉弯刀” 等3 种翼尖装置进行调参对比分析 , 得 出一些对翼尖装置设计具有
参考价值 的结论 。
关 键 词: 民用运输机 ; 翼尖装置; F F D技术 ; 粒子群算法 ; K r i g i n g 代理模型 中图分 类号 : V 2 2 4 . 4 文献 标 志码 : A 文 章编 号 : 1 0 0 0 - 2 7 5 8 ( 2 0 1 5 ) 0 4 - 0 5 3 3 — 0 7
控 制参 数优 化设 计 系 统 , 对 融 合 式 翼 梢小 翼 各 个 设
万美元左右 。可见 , 翼尖装置 的研究对于飞机减 阻有 重要 意义 。 翼梢 小翼 的设 计要 求减 小 的诱导 阻力 要大 于小 翼本身带来的废阻 , 在设计中, 小翼 高度 、 倾斜角 和 安装角等为影响小翼性能的几个重要参数。小翼平 面形 状 和翼 型形状 是影 响黏性 阻力和 可压 缩性 阻力
摘
要: 首先探 究 了融合 式翼梢 小翼倾斜 角、 高度 以及 安装 角对 民用运输机 气动特性 的影响 。然后基
于多区域 自由变形( F F D, f r e e f o r m d e f o r ma t i o n ) 技 术、 拉 丁超 立方取 样 方法 ( L H S , l a t i n h y p e r c u b e s a l n —
基于FFD的翼身融合水下滑翔机外形优化设计
2020年6月第38卷第3期西北工业大学学报JournalofNorthwesternPolytechnicalUniversityJuneVol.382020No.3https://doi.org/10.1051/jnwpu/20203830459收稿日期:2019⁃08⁃30基金项目:国家自然科学基金(51875466,51805436)与中国博士点基金(2018M643726,2019T20941)资助作者简介:李靖璐(1996 ),西北工业大学博士研究生,主要从事水下总体设计及优化算法研究㊂基于FFD的翼身融合水下滑翔机外形优化设计李靖璐,王鹏,陈旭,董华超(西北工业大学航海学院,陕西西安㊀710002)摘㊀要:水下滑翔机发展至今大体上可以分成2个大类:常规布局外形水下滑翔机与非常规布局水下滑翔机㊂翼身融合水下滑翔机作为一种非常规布局水下滑翔机,因其独特的流体外形布局,具有更好的流体动力特性㊂但设计出具有优秀水动力性能的翼身融合水下滑翔机外形较为困难,因此开展翼身融合水下滑翔机外形优化设计研究工作具有十分重要的意义㊂开展基于自由变形(FFD)的翼身融合水下滑翔机外形优化设计研究,以FFD参数化方法为核心,与CFD求解器㊁优化算法㊁网格变形方法相耦合,组成了完整的自动外形优化设计框架,并用该框架开展了翼身融合水下滑翔机外形优化设计工作㊂以翼身融合水下滑翔机下沉和上浮一个工作周期的平均阻力系数为目标函数,在考虑体积约束的条件下开展外形优化设计,优化结果表明翼身融合水下滑翔机的滑翔性能得到了明显提升㊂关㊀键㊀词:海洋工程;翼身融合水下滑翔机;自由变形;外形优化设计框架中图分类号:TP242㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1000⁃2758(2020)03⁃0459⁃06㊀㊀作为一种新型水下航行器,水下滑翔机因其航行时间长㊁航行距离远㊁监测范围广的特点成为了探测海洋环境的首选㊂水下滑翔机发展至今,按照其外形可以分为常规布局水下滑翔机和非常规布局水下滑翔机㊂翼身融合水下滑翔机作为一种非常规的水下滑翔机,采用机翼与机体平滑连接的方式,增大了升力面积,减小了表面阻力,因此具有更好的升阻比特性[1]㊂但是这种独特的外形也带来了设计上的困难㊂随着计算流体力学(CFD)㊁最优化等学科的发展,基于CFD的外形设计在工业上取得了极大进步[2]㊂利用CFD开展外形优化设计首要的就是参数化方法㊂现有的参数化方法包括基于CAD的参数化㊁PARSEC参数化㊁CST参数化㊁B样条参数化㊁FFD参数化等[3]㊂对于翼身融合水下滑翔机而言,基于CAD的参数化方法是将三维设计空间分割为一些二维截面,通过对二维截面的优化,得到优化后的三维几何外形[4]㊂PARSEC参数化㊁CST参数化[5]㊁B样条参数化等作为成熟的翼型参数化方法,是将翼身融合水下滑翔机分割为几个翼型截面,通过对翼型的优化实现对整机的优化㊂而FFD参数化方法通过对控制体的变形来操作所映射外形的变形,很好地保证了所研究外形的光滑性和连续性,且保留了相当好的局部变形能力,适用于复杂的三维外形㊂近年来,越来越多的学者在工程实际中选用这种参数化方法,包括气动外形优化[6],车辆外形优化[7]等,均取得了较好的效果㊂本文旨在利用FFD参数化方法,实现对翼身融合水下滑翔机精细化变形;配合CFD求解器,优化算法及网格变形算法,形成一套外形优化设计框架,并对一种翼身融合水下滑翔机开展外形优化设计工作,以提升其水动力性能㊂1㊀外形优化设计框架本文搭建的外形优化设计框架如图1所示[8],运行过程如下:㊃绘制几何外形初始网格及FFD控制体;㊃使用FFD参数化方法建立FFD控制体与几何目标的映射关系;㊃将网格文件导入CFD求解器中求解目标函西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷数及其梯度;㊃将计算结果传递至SQP算法,确定FFD控制体的变形量,间接变形几何外形;㊃根据几何表面网格变形更新整个计算域网格;㊃重复迭代输出最优外形;下面主要介绍框架中的FFD参数化方法㊁网格变形算法及SQP优化算法㊂图1㊀外形优化设计框架1.1㊀FFD参数化方法FFD参数化方法通过建立FFD控制点与目标外形表面点之间的数学映射关系,实现通过控制点的移动变形目标外形的目的,从而实现目标外形的参数化[9]㊂其基本原理如下:首先在FFD控制体上添加一个局部坐标系Oᶄ⁃STU,任何点X在这个系统中具有(s,t,u)坐标,所以在全局坐标系O⁃XYZ里,任意点X具有如下形式X=X0+sS+tT+uU(1)式中,X0为局部坐标系的原点在全局坐标系下的向量表示㊂任意点X的局部坐标坐标(s,t,u)很容易用线性代数方式表达,写成向量形式为s=TˑU㊃(X-X0)TˑU㊃St=SˑU㊃(X-X0)SˑU㊃Tu=SˑT㊃(X-X0)SˑT㊃Uìîíïïïïïïïï(2)㊀㊀由(2)式可知,X的局部坐标(s,t,u)应满足0ɤs,t,uɤ1㊀㊀接下来在FFD控制体上建立控制点Pi,j,k,Pi,j,k为FFD控制体上第(i,j,k)个控制点(i,j,k表示FFD控制体上分别沿着坐标轴U,V,W方向上的下标,每个方向被分为l,m,n份)㊂则Pi,j,k可表示为Pi,j,k=X0+ilS+jmT+knUi=0,1, ,l;j=0,1, ,m;k=0,1, ,n(3)㊀㊀故而,FFD控制体空间内任一点的笛卡尔坐标X(s,t,u)可表示为X=ðli=0ðmj=0ðnkNi,p(s)Nj,q(t)Nk,r(u)0ɤs,t,uɤ1(4)式中,Ni,p(s),Nj,q(t),Nk,r(u)为以s,t,u为变量的p,q,r次基函数㊂在按照(4)式建立了初始模型与FFD控制体上控制点的映射关系后,就可以通过改变FFD控制体上控制点Pi,j,k的位置来改变内部几何模型的形状㊂1.2㊀网格变形算法在1.1节中,FFD参数化方法建立了控制点与几何外形表面网格节点之间的映射关系,当控制点移动时,表面网格节点也会发生变形,为了对变形后的网格进行CFD求解,需要对空间网格更新,这就离不开网格变形㊂网格变形算法发展至今分成3大类:代数法㊁物理模型法和混合方法[10]㊂其中代数法运算速度快,求解效率高,易于编程实现㊂本文采用的网格变形算法为基于弧长的代数型方法,其基本原理如下Xv=F㊃Xs(6)式中:Xs是几何外形表面网格点的位移;Xv是空间网格节点的位移㊂二者通过弧长的归一化数F进行求解㊂F的求解以i方向为例,如(7)式所示㊂s(1,j,k)=0s(i,j,k)=㊀ðil=2(xl-xl-1)2+(yl-yl-1)2+(zl-zl-1)2,㊀㊀㊀i=2,3, ,imaxFi,j,k=si,j,k/simax,j,k(7)㊀㊀这样就可以实现根据几何表面网格节点的位移实现更新空间网格的目的㊂1.3㊀SQP优化算法序列二次规划法(SQP)是目前公认的求解非线性优化问题的最有效方法之一,其收敛性好㊁计算效率高[11]㊂SQP的算法分为两部分,主迭代和子迭㊃064㊃第3期李靖璐,等:基于FFD的翼身融合水下滑翔机外形优化设计代㊂主迭代产生一个序列,并求其收敛㊂在主迭代的每步迭代上,新产生一个二次规划子问题,用来指定主迭代的迭代方向,而子迭代本身的求解也是一个迭代过程㊂SQP算法迭代如下:①给定初始点x0㊁收敛精度ε㊁令二次导数矩阵H0=E,置k=0;②在点xk简化原问题为二次规划问题;③求解二次规划问题,并令Sk=S∗;④在方向Sk上对原问题目标函数进行一维搜索,得点xk+1;⑤判断xk+1是否满足给定精度,符合则令k=k+1㊁f∗=f(xk+1),输出最优解,终止计算,否则转⑥;⑥修正二次导数矩阵Hk+1,令k=k+1,转到步骤②继续迭代㊂2㊀外形优化仿真实例2.1㊀前处理利用外形优化设计框架对翼身融合水下滑翔机开展外形优化设计研究㊂初始水下滑翔机由5个NACA翼型放样得到,如图2所示㊂考虑到数值模拟的计算量及直接优化整机可能造成左右不对称问题,因此选用一半的滑翔机外形进行优化㊂图2㊀翼身融合式水下滑翔机使用ICEM软件绘制结构化网格,计算域为长方体域,大小为20mˑ20mˑ8m,水下滑翔机位于计算域中心㊂设置入口边界条件为速度入口,速度大小为滑翔机航速0.514m/s,出口压力设置为0㊂边界层采用O⁃Block来模拟,取y+值为1,第一层网格为0.0002m,最终网格数共计932432㊂数值模拟采用RANS方程作为控制方程,k⁃ω湍流模型作为封闭方程,计算稳态条件下的滑翔机流体动力参数㊂数值离散采用二阶迎风格式,设置收敛条件为迭代2000步或残差收敛小于1ˑ10-6㊂此外,求解器耦合有Adjoint方法[12],可以快速高效地求得目标函数对设计变量的梯度㊂绘制其外形FFD控制体如图3所示㊂控制体共计120个控制点,内部嵌有滑翔机表面网格,利用FFD参数化实现建立控制点与几何表面网格节点的映射关系㊂图3㊀FFD控制体2.2㊀网格无关性分析在开展外形优化设计工作之前,需要对网格无关性进行验证㊂对4种不同大小的网格进行数值仿真,网格量分别为385235(y+=1),485938(y+=1),932432(y+=1),2050589(y+=0.5)㊂分别计算在0,1ʎ,2ʎ3ʎ,4ʎ,5ʎ攻角下的升力因数和阻力因数,计算结果如图4所示㊂结果表明,随着网格量的增加,仿真结果越趋于一致㊂考虑到数值模拟和优化过程的计算量,最终选用932432的网格㊂图4㊀网格无关性验证2.3㊀优化问题浮力驱动式的水下滑翔机通过重浮心调节,实现水下的周期性㊁锯齿形运动㊂考虑水下滑翔机的㊃164㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷周期性上浮与下沉运动,以3ʎ攻角下沉和-3ʎ攻角上浮,0ʎ侧滑角,1节流速,环境温度20ħ,海水密度998.2kg/m3,一个标准大气压作为工作条件㊂外形优化设计应满足:㊃一个运动周期内实现总的阻力因数最小㊂具体为:分别计算在3ʎ和-3ʎ攻角下的阻力系数,取其均值为总的阻力因数,即令Cd,total=(Cd下沉+Cd上浮)/2达到最小;㊃体积应约束在合理范围内,确保内部空间足够安装设备及电路㊂具体为优化后外形与初始外形体积比约束在0.99 1之间,即0.99ɤV/Vbaseɤ1㊂按照以上要求提出外形优化问题:目标函数为最小化一个周期运动的阻力因数㊂设计变量为FFD控制点的位移,控制点可以沿x,y,z3个方向运动(命名为x,y,z)㊂约束条件为体积不等式约束㊂完整的外形优化设计问题如表1所示㊂表1㊀优化问题表述描述定义数量目标函数min(Cd,total)1设计变量xyz120120120约束0.99ɤV/Vbaseɤ112.4㊀优化结果与分析优化迭代收敛曲线如图5所示,共迭代43次,相比于初始外形,一个运动周期的总阻力系数降低了16.45%,同时,最优外形与初始外形的体积比为0.9971,满足0.99 1的体积比约束条件㊂对比优化前后的FFD控制体外形如图6所示,其中红色方点为初始控制点位置,绿色圆点为优化后控制点位置㊂在优化过程中,控制点产生位移进行移动,由于控制体和几何外形之间存在的映射关系,初始外形形状产生相应的变形㊂以滑翔机机梢㊁机翼与机体连接处㊁纵向对称面处的3个纵向截面和1个横向对称处截面为例,对比优化前后的外形变形如图7所示,绿色圆点代表优化后截面形状,红色方点代表优化前的截面形状㊂优化后滑翔机后缘机翼与机体连接处附近弦长减少;机翼处的厚度减少,后掠角略微增大;其余位置也进行了调整㊂图5㊀迭代过程图6㊀优化前后FFD控制体对比优化前后的相关流体参数如表2所示㊂表2㊀优化前后相关参数参数优化前优化后变化率/%下沉阻力因数0.024870.0209115.95上浮阻力因数0.024870.0206517.00总阻力因数0.024870.0207816.45滑翔机下沉和上浮的阻力因数均得到降低,一个周期的总阻力因数大大降低㊂分析阻力因数降低的原因,水下滑翔机的阻力主要为摩擦阻力和压差㊃264㊃第3期李靖璐,等:基于FFD的翼身融合水下滑翔机外形优化设计阻力,其中摩擦阻力主要与表面积大小有关,压差阻力与外形表面压力分布有关㊂图7d)明显可以看出优化后外形的表面积减少㊂对比优化前后在3ʎ攻角下的压力云图,如图8所示㊂可以看出在保持原有流线平行分布的同时,头部低压区减小,压力分布得到调整㊂图7㊀优化前后截面形状对比图8㊀压力云图3㊀结㊀论本文对一种翼身融合水下滑翔机开展了外形优化设计研究,提出了一套外形优化框架,包括FFD参数化方法用于参数化,CFD求解器用于数值模拟,网格变形算法用于计算网格更新,SQP算法用于优化迭代㊂外形优化设计以最小化一个周期运动的平均阻力系数为目标函数,在保证体积约束的情况下,翼身融合水下滑翔机一个周期的平均阻力系数降低了16.45%,同时在下沉与上浮阶段的阻力系数均得到了降低㊂参考文献:[1]㊀DHANAKMR,XIROSNI.SpringerHandbookofOceanEngineering[M].Cham,Switzerland:Springer,2016:301⁃322[2]㊀CARMICHAELRL,ERICKSONLL.PanAir⁃aHigherOrderPanelMethodforPredictingSubsonicorSupersonicLinearPotentialFlowsaboutArbitraryConfigurations[C]ʊAIAA14thFluid&PlasmaDynamicsConference,1981[3]㊀王丹.飞行器气动外形优化设计方法研究与应用[D].西安:西北工业大学,2015WANGDan.ApproachandApplicationResearchonAerodynamicShapeOptimizationDesign[D].Xiᶄan:NorthwesternPoly⁃technicalUniversity,2015(inChinese)[4]㊀孙春亚.翼身融合水下滑翔机外形设计与运动分析[D].西安:西北工业大学,2017SUNChunya.ShapeDesignandMotionAnalysisofBlended⁃Wing⁃BodyUnderwaterGlider[D].Xiᶄan:NorthwesternPolytech⁃nicalUniversity,2017(inChinese)[5]㊀CHENGSHANL,PENGW,HUACHAOD,etal.ASimplifiedShapeOptimizationStrategyforBlended⁃Wing⁃BodyUnderwaterGliders[J].StructuralandMultidisciplinaryOptimization,2018,58:2189⁃2202[6]㊀陈颂,白俊强,史亚云,等.民用客机翼/机身/平尾构型气动外形优化设计方法研究[J].航空学报,2015,36(10):3195⁃3207CHENSong,BAIJunqiang,SHIYayun,etal.AerodynamicOptimizationDesignofCivilJetWing⁃Body⁃TailConfiguration[J].ActaAeronauticaetAstronauticaSinica,2015,36(10):3195⁃3207(inChinese)[7]㊀汪怡平,王涛,黎帅.基于自由变形技术的汽车气动减阻优化[J].机械工程学报,2017,53(9):135⁃143㊃364㊃㊃464㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷WANGYiping,WANGTao,LIShuai.AerodynamicDragReductionofVehicleBasedonFreeFormDeformation[J].JournalofMechanicalEngineering,2017,53(9):135⁃143(inChinese)[8]㊀LIJ,WANGP,DONGH,etal.ShapeOptimisationofBlended⁃Wing⁃BodyUnderwaterGlidersBasedonFree⁃FormDeforma⁃tion[J].ShipsandOffshoreStructures,2020,15(3):227⁃235[9]㊀WANGX,SONGB,PENGW,etal.HydrofoilOptimizationofUnderwaterGliderUsingFree⁃FormDeformationandSurrogate⁃BasedOptimization[J].InternationalJournalofNavalArchitecture&OceanEngineering,2018,10(6):730⁃740[10]张来平,邓小刚,张涵信.动网格生成技术及非定常计算方法进展综述[J].力学进展,2010,40(4):424⁃447ZHANGLaiping,DENGXiaogang,ZHANGHanxin.ReviewsofMovingGridGenerationTechniquesandNumericalMethodsforUnsteadyFlow[J].AdvancesinMechanics,2010,40(4):424⁃447(inChinese)[11]GILLPE,MURRAYW,SAUNDERSMA.SNOPT:anSQPAlgorithmforLarge⁃ScaleConstrainedOptimization[J].SocietyforIndustrialandAppliedMathematics,2005,47(1):99⁃131[12]WUX,WANGP,LIJ,etal.Adjoint⁃BasedOptimizationforBlended⁃Wing⁃BodyUnderwaterGlidersᶄShapeDesign[C]ʊOceans⁃MTS/IEEEKobeTechno⁃OceansConference,2018ShapeOptimizationofBlended⁃Wing⁃BodyUnderwaterGlidersBasedonFree⁃FormDeformationLIJinglu1,WANGPeng1,CHENXu1,DONGHuachao1(SchoolofMarineScienceandTechnology,NorthwesternPolytechnicalUniversity,Xiᶄan710002,China)Abstract:Currentlydevelopedunderwatergliderscanberoughlydividedintothetwotypes:traditionalconfigura⁃tionandunconventionalconfiguration.Asatypeofunderwatergliderswithunconventionalconfiguration,ablended⁃wing⁃body(BWB)underwatergliderhasbetterfluiddynamicperformancesbecauseofitsuniqueshape.However,itisdifficulttodesigntheshapeoftheBWBunderwatergliderthathasexcellenthydrodynamicperformances.Therefore,itisofgreatsignificancetooptimizeitsshape,whichthispapercarriesoutbyusingthefree⁃formde⁃formation(FFD).ThecompleteandautomaticshapeoptimizationframeworkisestablishedbyjointlyusingFFDpa⁃rameterizationmethod,CFDsolver,optimizationalgorithmandmeshdeformationmethod.TheframeworkisusedtooptimizetheshapeofaBWBunderwaterglider.TheaveragedragcoefficientoftheBWBunderwatergliderduringitssinkingandfloatinginoneworkingperiodisusedastheobjectivefunctiontooptimizeitsshape,withthevolumeconstraintsconsidered.TheoptimizationresultsshowthattheglidingperformanceoftheBWBunderwatergliderisremarkablyenhanced.Keywords:BWBunderwaterglider;shapeoptimizationframework;free⁃formdeformation©2019JournalofNorthwesternPolytechnicalUniversity.ThisisanOpenAccessarticledistributedunderthetermsoftheCreativeCommonsAttributionLicense(http://creativecommons.org/licenses/by/4.0),whichpermitsunrestricteduse,distribution,andreproductioninanymedium,providedtheoriginalworkisproperlycited.。
基于FFD方法的满足工程约束的三维增升设备参数化方法的制作流程
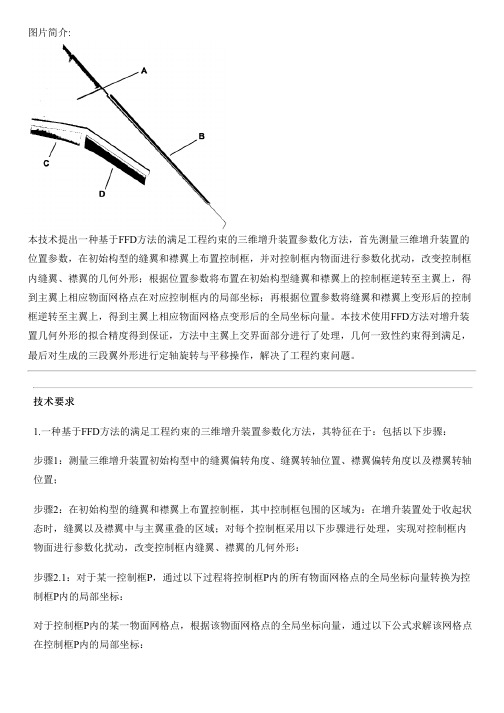
图片简介:本技术提出一种基于FFD方法的满足工程约束的三维增升装置参数化方法,首先测量三维增升装置的位置参数,在初始构型的缝翼和襟翼上布置控制框,并对控制框内物面进行参数化扰动,改变控制框内缝翼、襟翼的几何外形;根据位置参数将布置在初始构型缝翼和襟翼上的控制框逆转至主翼上,得到主翼上相应物面网格点在对应控制框内的局部坐标;再根据位置参数将缝翼和襟翼上变形后的控制框逆转至主翼上,得到主翼上相应物面网格点变形后的全局坐标向量。
本技术使用FFD方法对增升装置几何外形的拟合精度得到保证,方法中主翼上交界面部分进行了处理,几何一致性约束得到满足,最后对生成的三段翼外形进行定轴旋转与平移操作,解决了工程约束问题。
技术要求1.一种基于FFD方法的满足工程约束的三维增升装置参数化方法,其特征在于:包括以下步骤:步骤1:测量三维增升装置初始构型中的缝翼偏转角度、缝翼转轴位置、襟翼偏转角度以及襟翼转轴位置;步骤2:在初始构型的缝翼和襟翼上布置控制框,其中控制框包围的区域为:在增升装置处于收起状态时,缝翼以及襟翼中与主翼重叠的区域;对每个控制框采用以下步骤进行处理,实现对控制框内物面进行参数化扰动,改变控制框内缝翼、襟翼的几何外形:步骤2.1:对于某一控制框P,通过以下过程将控制框P内的所有物面网格点的全局坐标向量转换为控制框P内的局部坐标:对于控制框P内的某一物面网格点,根据该物面网格点的全局坐标向量,通过以下公式求解该网格点在控制框P内的局部坐标:其中表示该网格点的全局坐标向量,(u,v,w)为该网格点在控制框P内的局部坐标,0≤(u,v,w)≤1;为控制框P的控制顶点(i,j,k)的全局坐标向量;分别为l,m和n次NURBS基函数;步骤2.2:根据设计要求对控制框P以及控制框P中所包围的物面网格进行变形,具体过程为:根据设计要求改变控制框P中某些控制顶点的位置,得到这些控制顶点新的全局坐标向量进而得到变形后的控制框P′;根据步骤2.1得到的控制框P内所有物面网格点的局部坐标,利用公式求得这些物面网格点变形后的全局坐标向量,其中(u,v,w)为某一物面网格点在控制框P以及P′内的局部坐标,为该某一物面网格点变形后的全局坐标向量;步骤3:根据步骤1测量得到的缝翼偏转角度、缝翼转轴位置、襟翼偏转角度以及襟翼转轴位置,将布置在初始构型缝翼和襟翼上的控制框P逆转至主翼上得到控制框Q,对主翼上的每个控制框进行如下处理,得到主翼上相应物面网格点在对应控制框内的局部坐标:对于某一控制框Q,通过以下过程将控制框Q内的所有物面网格点的全局坐标向量转换为控制框Q内的局部坐标:对于控制框Q内的某一物面网格点,根据该物面网格点的全局坐标向量,通过以下公式求解该物面网格点在控制框Q内的局部坐标:其中表示该网格点的全局坐标向量,(u,v,w)为该网格点在控制框P内的局部坐标,0≤(u,v,w)≤1;为控制框Q的控制顶点(i,j,k)的全局坐标向量;分别为l,m和n次NURBS基函数;步骤4:根据步骤1测量得到的缝翼偏转角度、缝翼转轴位置、襟翼偏转角度以及襟翼转轴位置,将步骤2.2中变形后的控制框P′逆转至主翼上得到控制框Q′,对主翼上每个由变形后的控制框逆转得到的控制框进行如下处理,得到主翼上相应物面网格点变形后的全局坐标向量:对于控制框Q′,根据步骤3得到的控制框Q内所有物面网格点的局部坐标,利用公式求得主翼上这些物面网格点变形后的全局坐标向量,为控制框Q′的控制顶点(i,j,k)的全局坐标向量;步骤5:根据设计要求,若需要对三维增升装置的位置参数进行扰动,则将经过步骤2到4变形后的三维增升装置的襟翼和缝翼收起,然后改变位置参数,再根据新的位置参数对变形后的三维增升装置做定轴旋转与平移操作,重新打开三维增升装置,得到最终的三维增升装置外形;所述位置参数指缝翼偏转角度、缝翼转轴位置、襟翼偏转角度以及襟翼转轴位置。
自由变形技术在RAE2822翼型优化设计中的应用

自由变形技术在RAE2822翼型优化设计中的应用陈立立;郭正;侯中喜【摘要】采用自由变形技术实现对RAE2822跨声速翼型表面的参数化,采用试验设计方法对设计参数进行计算流体力学数值模拟样本训练,最后采用Kriging代理模型和MIGA、NLPQL优化算法进行优化分析,将得到的优化变量进一步进行计算流体力学分析获得最后的优化结果.计算结果显示,自由变形参数化方法简单易行,可实现直接对网格的变形;优化的结果相比于原始翼型,升阻比增加了57.2%,从而证明了本文方法的可行性和有效性.【期刊名称】《国防科技大学学报》【年(卷),期】2018(040)005【总页数】9页(P45-53)【关键词】RAE2822;自由变形;代理模型;升阻比;优化设计【作者】陈立立;郭正;侯中喜【作者单位】国防科技大学空天科学学院,湖南长沙 410073;国防科技大学空天科学学院,湖南长沙 410073;国防科技大学空天科学学院,湖南长沙 410073【正文语种】中文【中图分类】TP211.3自由变形(Free-Form Deformation, FFD)方法由Sederberg和Parry[1]于1986年首次提出。
在模型参数化方法中,FFD和计算机辅助设计(Computer AidedDesign, CAD)参数化法都具有高效率和普适性等优势[2],得到了广泛应用。
CAD参数化可以实现较大范围的外形变化,但是CAD参数化对复杂外形的参数化依然比较困难。
对于计算流体力学(Computational Fluid Dynamics, CFD)而言,外形参数化后还要进行网格的划分,这无疑增加了设计的流程和时间,虽然FFD技术只能实现较高质量的小范围到中等尺度网格变化,不太适合较大尺度的变形,但是FFD是在同一套网格上进行变形,有效减少了CAD参数化重建模和网格划分的工作量,在细致优化阶段相比于CAD参数化具有非常明显的优势,同时具有控制变量少的优势。
把一物体嵌入另一物体

把一物体嵌入另一物体1自由变形方法FFD自由变形FFD(Free-FormDeformation)方法是常用的一种与物体表示无关的变形方法。
FFD算法的实施可以比喻为雕塑家的手,每实施一次,就相当于用手把整个物体雕塑一遍,随着FFD算法的逐次实施,最终把物体雕塑成所希望的形状。
FFD算法的前提是:假定物体有很好的弹性,容易在外力的作用下发生变形。
应用该法进行造型时,须先设计一个长方体框架,将物体嵌入框架中。
当框架受外力变形时,物体的形状也发生改变。
框架的形变是由其上的控制顶点的变化而产生的,因此可通过框架上的控制顶点来改变可控制物体的形状,一般称该框架为控制框架。
1.1FFD数学原理在数学中变形可以看作一个由R3到R3的映射某=F(某),其定义域是待变形的物体表面所包围的实体,其值域是变形后的物体。
所以关键问题是如何构造此映射,使模型的构造具有较好的直观性、交互性和透明性。
Sederberg和Parry使用了三变量张量积Berntein多项式和一个控制框架来构造映射F(某),其算法如下:(1)首先,在一个包围待变形物体的长方体中构造局部坐标系O-STU,如图1所示。
图1构造局部坐标系和控制框架其中某0(O′)是局部坐标系的原点,S,T,U是轴矢量。
笛卡尔坐标系O-某YZ中任意一点某在局部坐标系中具有坐标(,t,u)某=某0+S+tT+uU式中某0为局部坐标系的原点:(1.1)显然,对控制框架内的任意点,其局部坐标满足:0≦,t,u≦1。
(2)在长方体上构造控制顶点网格Pi,j,k,分别沿S,T和U三个方向用平行于O′TU,O′SU,O′ST坐标面的等距截面将O′S,O′T和O′U等分为l,m和n个区间,则Pi,j,k可表示为(1.2)其中i=0,1,,l;j=0,1,,m;k=0,1,,n框架内任意一点的笛卡尔坐标某可表示为(1.3)式中Bil(),Bjm(t)和Bnk(u)分别为l,m,n次Berntein多项式基函数。
ffd 变形 原理

ffd 变形原理
FFD(Free Form Deformation)变形器,即自由形式变形器,是一种在计算机图形学中广泛应用的建模工具。
其原理是通过控制点对物体进行变形,从而实现对物体形状的调整。
这种变形方式具有较高的灵活性,可以实现多种复杂的造型效果。
FFD变形器的原理可以概括为以下几点:
1. 创建FFD控制器:首先在场景中创建一个FFD控制器,这个控制器通常是一个立方体或球体。
2. 设定控制点:在FFD控制器的属性面板中,设置控制点的数量和分布。
控制点的数量和分布会影响到变形后的物体形状。
3. 链接对象:将FFD控制器与需要变形的物体(如立方体、圆柱体等)相连接,使控制器能够对物体产生影响。
4. 调整控制点:在Modify(修改)命令面板中,对控制点进行调整。
调整控制点的位置、旋转和缩放,从而改变物体的形状。
5. 转换为可编辑对象:在对控制点进行调整后,需要将物体转换为
可编辑对象,以便继续进行细节调整。
6. 细化或优化:根据需要,可以对FFD控制器进行细化或优化,以获得更精细的物体形状。
总之,FFD变形器的原理是通过调整控制点来改变物体的形状。
这种变形方式具有较高的灵活性,可以实现多种复杂的造型效果。
在实际应用中,FFD变形器被广泛用于游戏、影视、工业设计等领域。
考虑短舱安装参数的全机气动外形优化设计
考虑短舱安装参数的全机气动外形优化设计许丹阳;白俊强;雷锐午【摘要】针对跨声速宽体客机机翼、机身、短舱、挂架、平尾、垂尾全机构型中各部件之间存在的气动干扰和力矩耦合问题,采用多块拼接自由变形(FFD)方法进行全机多部件的参数化,利用雷诺平均Navier-Stokes方程(RANS)进行流场求解,结合离散伴随技术和序列二次规划优化算法进行考虑短舱安装参数变化和平尾配平的气动外形优化设计.经过优化之后,短舱附近机翼的压力分布形态变光顺,设计点阻力减小3.82%,并且获得了无激波的压力分布形态.【期刊名称】《西安交通大学学报》【年(卷),期】2019(053)004【总页数】8页(P150-157)【关键词】气动外形优化;平尾配平;短舱安装参数;自由变形;离散伴随【作者】许丹阳;白俊强;雷锐午【作者单位】西北工业大学航空学院,710072,西安;西北工业大学航空学院,710072,西安;西北工业大学航空学院,710072,西安【正文语种】中文【中图分类】V211近年来,高性能计算机硬件平台发展突飞猛进,基于雷诺平均Navier-Stokes方程的气动优化设计方法在飞行器外形设计领域得到越来越广泛的应用[1-3]。
宽体客机作为当前民航市场上的最新一代客机,巡航马赫数达到0.85,处于典型的跨声速非线性区间。
客机机翼外形的微小改变往往会产生较大的气动力变化;同时全机多部件之间的互相干扰,也使得气动外形设计工程师无法进行精确定量的外形设计。
为了能够合理地对设计空间进行探索,以得到气动特性较好的构型,跨声速客机气动外形优化设计问题往往需要大规模设计变量[4];同时也需要考虑多部件之间的耦合来获得综合性能最优的气动外形。
国外大量的研究成果表明,基于伴随的气动优化设计方法在复杂大规模气动外形优化设计问题中有较好的应用前景。
Alonso等基于斯坦福大学非结构网格求解器(SU2)实现了旋翼以及全机构型的气动优化设计[5];Zingg等采用离散伴随方程结合Newton-Krylov隐式求解方法,开展了气动外形优化设计研究取得了显著的成果,并将该方法拓展到了自然层流翼型设计中,实现了层流翼型的优化减阻[6];Martins 等利用高可信度多学科优化设计平台(MACH)进行了机翼、翼身组合体以及风力机的优化设计研究[7]。
ffd曲面变形算法
ffd曲面变形算法FFD曲面变形算法是一种常被使用的三维曲面变形算法,它被广泛应用于计算机动画、CAD软件和虚拟现实等领域。
它使用了一种名为自由变形网格(Free-Form Deformation,简称FFD)的基本技术,通过对自由变形网格的调整来对目标曲面进行形态变化。
本文将通过分步骤的方式来介绍这种算法的具体实现过程。
第一步:创建自由变形网格首先需要创建一个自由变形网格,这个网格通常是由若干个正方形或矩形组成的。
在创建过程中,需要确定网格的长、宽和高度等参数。
一般情况下,网格应越密集,形态变化效果越细腻。
第二步:在自由变形网格上进行控制点的设置在自由变形网格中,需要选择若干个特定的控制点,通过这些控制点来精确地控制曲面的形态。
控制点通常是自由变形网格上的交点或边缘的中心点,通过调整这些控制点的坐标,可以改变曲面表面的形状。
第三步:变形模型在对自由变形网格上的控制点进行了设置后,需要进行变形模型的操作。
变形模型的过程实际上是对网格进行划分,然后通过对每个划分区域内的控制点进行移动、旋转、缩放等操作来实现曲面的变形。
变形模型的实现过程中要注意,需要不断地调整和优化各个控制点的位置和曲面的形态。
第四步:渲染曲面完成了以上步骤后,就可以对曲面进行渲染了。
通过将曲面的顶点坐标和每个顶点的法向量传输给渲染引擎,可以实现对曲面的绘制。
综上所述,FFD曲面变形算法是一种常用的三维曲面变形算法,通过自由变形网格和控制点的设置,可以实现对目标曲面的形态变化。
其优点在于可以快速、实时地对大型、复杂的曲面进行形态调整,适用于需要实时响应的虚拟现实和游戏开发等领域。
三维动画设计与制作:FFD修改器的使用---靠垫的制作
提示:
FFD修改器含有控制点、晶格和设置体积三 个子对象,但是在一般的编辑修改过程中, 只需要使用控制点子对象就可以,其他两个 子对象很少使用,而且该修改器的参数一般 情况下使用默认设置即可。
谢谢大家!
FFD修改器的使用---靠垫的制作
靠垫效果图
FFD修改器
FFD代表自由形式变形,自由变形修改命令使用 晶格体框包围选种几何体,通过调整晶格体的控 制点,可以改变封闭几何体的形状。其中包括 FFD 222、FFD 333、FFD 444、 值是指晶 格的每一方向或每一侧面上控制点 的数目,而FFD长方体是指采用类 似长方体形状的晶格来控制物体变 形,FFD圆柱体是指采用类似圆柱 体形状的晶格来控制物体变形
DFFD自由变形算法实现过程
DFFD自由变形算法实现过程作者:刘敏来源:《中国科技纵横》2014年第08期【摘要】本文主要从三维的Delaunay三角划分、三维Voronoi图和Sibson坐标值三个方面对算法进行全面分析。
【关键词】自由变形算法 Delaunay三角划分 Voronoi图 Sibson局部坐标【Abstract】 This paper is divided, three-dimensional Voronoi diagram and Sibson coordinate values ??of the three aspects of a comprehensive analysis of algorithms from the three-dimensional Delaunay triangulation.【Key words】 free-form deformation algorithm Delaunay triangulation Voronoi diagram Sibson local coordinate1 三维Dirichlet算法概述为了实现人脸夸张化变形,就必须在三维上进行变形,由于现今Dirichlet自由变形算法多应用于二维问题中,因此必须将其推广至三维上。
我们可以对比其在二维时的Delaunay三角划分和Voronoi图形成来实现算法的三维推广。
首先,Delaunay三角划分时不再是划分为三角形,而是划分成四面体。
其次,在形成Voronoi图时选取的是不再是三角形的外接圆圆心,而是四面体的外接球球心。
最后,Sibson 坐标的值是由中垂面切割后的体积与Voronoi单元体积之比。
因此,算法总的步骤如下:(1)设计控制点集合,从读入的物体点中选取控制点,不需要在控制点集合上定义任何特殊的拓扑结构。
控制点可以在物体表面,也可以在物体的内部,但是物体需要变形的部分必须包含在控制点集合的凸包内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于任意拓扑网格的FFD方法
价:单元C中包含顶点V的边的数目。 类n单元:给定网格L中一个单元C,考虑C中价为n的顶点V。经过一 次细分后,生成一个从V开始的新单元,它包含2n个四边形,两个价 为n的顶点和2n-2个价为3的顶点。
基于任意拓扑网格的FFD方法
细分体的边界控制
三变量Catmull-Clark细分方法应用于任意拓扑的网格时,得到的可变 形空间与网格的形状不一致,通常从网格的边界向里收缩。
移动控制顶点的FFD变形方法存在的问题:
1.难是得到精确的变形形状。 2.难以使得物体上的某些点到达指定的位置。 3.难以了解控制顶点的移动和物体变形结果之间的关系。 4.当控制顶点数目多或被变形物体遮挡时,移动控制顶点困难。
1992年,Hsu等人提出直接操纵FFD变形方法。 核心思想:用户从物体上选择一个点,并把该点移动到变形后的位置, 系统自动反求导致这种变化的FFD控制顶点的变化。
自由变形方法FFD
设FFD块的三个坐标方向为(S,T,U)
一个FFD块由(3l + 1) * (3m + 1) * (3n + 1)个控制顶点定义 等价于:由l*m*n个三三次超曲面构成。 FFD块对物体变形的步骤: 1. 确定物体的顶点(或控制顶点)在网格空间的位置。建立FFD块的局部坐标系: X(s,t,u) = X0 + Ss + tT + Uu X0为局部坐标系的原点(FFD块的一个角点) (S,T,U)为网格三条互相垂直的边 设网格为正方体,则控制顶点为:
基于任意拓扑网格的FFD方法
1996年,MacCracken提出一种允许网格为任意拓扑形状的更一般的 FFD方法。 变形空间曲细分(Subdivision)方法来定义生成体。 用网格定义变形空间:
一个网格(L)定义为由一系列顶点集{P0,P1,…,Pn}和一指定它们连 接关系的单纯形组成。 网格的组成:
自由变形方法FFD
2.变形FFD块。即移动控制顶点Pi,j,k 3.确定顶点变形后的位置。
自由变形方法FFD
EFFD(扩展的FFD方法)
FFD只适用于平行六面体的网格形状 1990年,Coquillart提出一种扩展的FFD方法,适用于非平行六面体 的网格形状。 EFFD构造:
EFFD允许FFD型网格作为它结构的一部分,许多个FFD型网格可合并成 EFFD型网格。
细分体的边界控制
具有边界和边控制的Catmull-Clark体
可变形空间及变形过程
空间点P相对于单元C的相对位置。 对于类3单元,用三线性插值也计算P点的相对位置 对于类n单元,首先把单元分割成四面体,然后用分片三线性插 值来调整点P在变形后单元的位置。 变形过程: 1.构造控制网格,把物体放于网格内。 2.网格相对于物体冻结。 3.计算可变区域内每一点P对于该单元的相对位置。 对于类n单元,算得三线性插值参数(u,v,w)
基于任意拓扑网格的FFD方法
三变量三次均匀B样条体的细分方法: 给定一个定义三变量B样条体的控制网格L,细分方法生成一个新的 控制网格L1,L1包含了L一次细分后的所有顶点。可分为 1.单元点(Cell point) 网格中构成该单元所有点的平均 2.面点(Face point) 3.边点(Edge point) 4.顶点点(Vertex point)
自由变形(FFD)技术
柴学梁
自由变形方法FFD
1986年,Sederderg等提出的适用于柔性物体动画的更为一般方法。 不直接操作物体,而是将物体嵌入一空间,随所嵌空间的变形而变形。 对于二维情况(双三次Bezier曲面):
自由变形方法FFD
对于三维情况(三三次Bezier超曲面):
将一正方体映射为弯曲的体物。 Bezier体由64个控制顶点Pi,j,k来指定,当物体嵌入正方体时,物体随Q(u,v,w) 的变形而变形。 多个Bezier超曲面可拼接生成一分段光滑的Bezier体,即FFD体 由三根互相垂直的坐标轴排形的长方体结构的控制顶点网格,称Lattice
即求解P(u,v,w) = P0 + u(P1-P0)+ v(P2-P0) + w(P3-P0) 4.移动原始网格的顶点,使它产生变形,并把变形后的细分n次。 对于可变形区域内物体上点P,根据上一步求得的索引号找到 变形后网格对应的单元,再根据该点P的参数(u,v,w)计算P变 形后的点。
直接操纵的FFD变形方法
+
1
B
2
BT
直接操纵的FFD
边界控制顶点的重数为3,且要保 证重数为3的顶点必须重合 则添加一个矩阵S =》P = (BS+)+ Q
Hale Waihona Puke 0 0 S= 0 00 1 0 0 1 0 0 1 0 0 0 1
0 b1
对于多个点的约束问题:
Q0 b 0 0 Q1 = 0
b0 2 b1 1
EFFD(扩展的FFD方法)
EFFD(扩展的FFD方法)
变形步聚: 1.给定物体上的一点Q,首先利用超曲面的凸包性质找到Q所在的超 曲面,然后对方程进行牛顿迭代,求得Q在相应超曲面的局部坐标系 (u,v,w)。其中Pi,j,k为该超曲面变形前的控制顶点。 2.移动EFFD块的控制顶点 3.根据曲面方程,求得Q变形后的位置
边(Edge):网格单纯形中连接的两个顶点 面(Face):顶点的最小连接环 单元(Cell):由一系列面包围的空间区域
基于任意拓扑网格的FFD方法
基于任意拓扑网格的性质:
1.网格具有好的连接性质,即没有顶点位于不包含该顶点的边上。 2.所有的单元都是闭的,即构成单元的面不包含任何洞。 3.任何两个单元互不相交,即不考虑自交的网格。
直接操纵的FFD
核心问题:单个点直接操纵的约束问题 (物体上一点Q从源位置Q1到目标位置Q2,求网格控制顶点的某种布 局) 根据FFD方程:Q1 = BP Q2 = B(P + P) =》 Q = Q2 - Q1 = BP 根据矩阵论知识:可推出 P = (B+)+ Q (B+)为B的广义逆
B =
0 b3
b1 0
b1 2
P0 P1 0 P2 1 b3 P3 P4