寻路算法 Transit Node Routing based on Highway Hierarchies
服务器 路点寻路算法

服务器路点寻路算法在当今信息技术迅猛发展的时代,服务器作为数据处理和存储的核心设备,其性能和效率对于整个信息系统的运行至关重要。
特别是在大规模网络应用、游戏、导航系统等领域,服务器需要处理大量的路径查询请求,如何实现高效、准确的路点寻路算法成为了一个亟待解决的问题。
路点寻路算法不仅要考虑服务器的计算能力,还要兼顾网络带宽、数据传输量以及用户体验等多个方面。
因此,本文旨在探讨服务器上路点寻路算法的设计原理、实现方法以及优化策略,以期为相关领域的研究和实践提供有益的参考。
一、路点寻路算法概述路点寻路算法是一种用于在图形或网络中寻找从起点到终点最优或次优路径的算法。
在服务器应用中,路点通常指的是网络中的节点或位置点,寻路则是指在这些节点之间找到一条符合特定条件的路径。
根据不同的应用场景和需求,路点寻路算法可以分为多种类型,如最短路径算法、最快路径算法、最少换乘算法等。
这些算法在服务器中的实现需要考虑到数据的存储结构、查询效率、并发处理能力等因素。
二、服务器路点寻路算法设计原理2.1 数据结构设计在服务器中实现路点寻路算法,首先需要设计一个合适的数据结构来存储路点和路径信息。
常用的数据结构包括邻接矩阵、邻接表、图等。
邻接矩阵适用于节点数量较少、关系密集的情况,而邻接表则更适合节点数量多、关系稀疏的场景。
图数据结构则可以灵活地表示节点和边的关系,并支持复杂的路径查询操作。
在实际应用中,可以根据路点数量、路径复杂度和查询需求来选择合适的数据结构。
2.2 算法选择与优化路点寻路算法的选择取决于具体的应用场景和需求。
例如,在游戏服务器中,可能需要使用A*算法或Dijkstra算法来寻找最短路径;在导航系统中,则可能需要考虑实时交通信息,使用基于时间的动态路径规划算法。
此外,还可以通过优化算法来提高寻路效率,如使用启发式搜索、剪枝技术、并行计算等方法。
2.3 并发处理与负载均衡服务器通常需要处理大量的并发路径查询请求,因此路点寻路算法的设计需要考虑到并发处理和负载均衡的问题。
寻路算法的理解

寻路算法的理解一、寻路算法是什么呢?哎呀,寻路算法这东西呀,就像是我们在一个超级大的迷宫里找出口的魔法一样。
你想想看,假如你在一个超级复杂的游戏地图里,周围全是弯弯曲曲的小道、高高的墙壁,你要从一个地方到另一个地方,要是没有个好办法,那可就只能像没头的苍蝇一样乱撞啦。
寻路算法就是这样一个超级聪明的办法,它能帮我们在这种超级复杂的环境里,找到一条从起点到终点的路。
比如说在那些超酷的角色扮演游戏里,我们的小角色要从村子跑到遥远的山洞去探险。
寻路算法就开始工作啦,它会把整个地图当成一个大拼图,一块一块地去看,哪些地方能走,哪些地方是走不通的。
它就像一个超级细心的小管家,把所有的路线都放在心里衡量一下,然后选出那条最棒的路线。
二、寻路算法的种类寻路算法可不是只有一种哦,就像世界上有各种各样的小宠物一样,每种都有自己的特点。
有A算法呢,这个算法就像是一个超级学霸,它总是能很快地找到一条看起来很不错的路线。
它是怎么做到的呢?它呀,会给每个可能的路线打分,就像老师给学生的作业打分一样。
分数高的路线,那肯定就是比较好的啦。
还有Dijkstra算法,这个算法就像是一个超级老实的小工人。
它会从起点开始,一点一点地去探索周围的路。
它不会像A算法那样那么聪明地去打分,但是它特别的踏实,一步一个脚印,最后也能找到到达终点的路。
三、寻路算法的重要性寻路算法在我们的生活里可重要啦。
在那些超级大的物流仓库里,有好多好多的货物要搬运。
寻路算法就能帮那些搬运机器人找到最快的路线,这样就能更快地把货物送到该去的地方。
如果没有寻路算法的话,那些机器人可能就会在仓库里绕来绕去,浪费好多好多的时间呢。
在导航软件里也离不开寻路算法呀。
当我们要开车从一个城市到另一个城市的时候,导航软件里的寻路算法就会根据实时的路况,给我们找出一条最不堵车、最快到达的路线。
要是没有它的话,我们可能就会被堵在路上,不停地抱怨啦。
四、寻路算法的小缺点不过呢,寻路算法也不是完美无缺的。
astar寻路算法原理

astar寻路算法原理
A(A星)寻路算法是一种常用的启发式搜索算法,用于在图中
找到从起点到终点的最短路径。
它结合了Dijkstra算法和启发式搜
索的优点,具有较高的搜索效率。
A算法基于图的搜索,其中每个节点表示一个状态,边表示从
一个状态到另一个状态的转移。
算法使用两个函数来评估每个节点
的重要性,g(n)表示从起点到节点n的实际代价,h(n)表示从节点
n到终点的估计代价。
A算法通过综合考虑这两个函数来选择下一个
要扩展的节点。
具体来说,A算法通过维护一个开放列表和一个关闭列表来进
行搜索。
它首先将起点加入开放列表,然后重复以下步骤直到找到
终点或者开放列表为空:
1. 从开放列表中选择f(n)=g(n)+h(n)最小的节点n进行扩展。
2. 将节点n从开放列表中移入关闭列表。
3. 对节点n的相邻节点进行检查,更新它们的g值和f值,并
将它们加入开放列表中。
A算法的关键在于如何选择合适的启发函数h(n)以及如何高效地维护开放列表和关闭列表。
合适的启发函数可以大大提高搜索效率,而高效的列表维护可以减少搜索时间。
总的来说,A算法是一种高效的寻路算法,能够在图中找到最短路径,并且可以通过调整启发函数来适应不同的问题。
浅谈寻路A算法范文
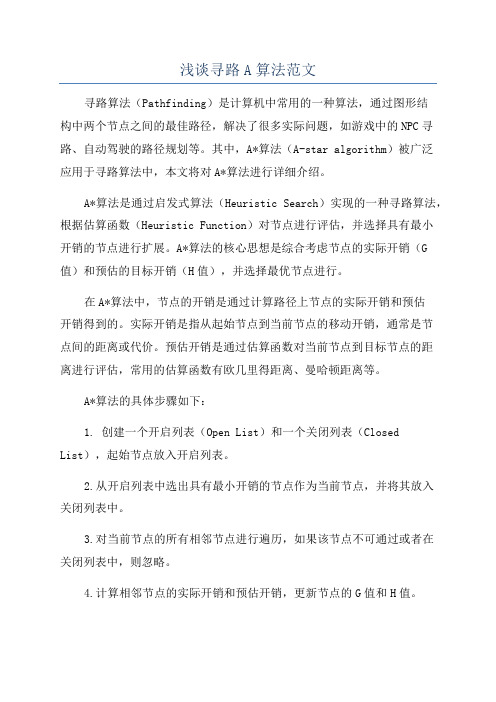
浅谈寻路A算法范文寻路算法(Pathfinding)是计算机中常用的一种算法,通过图形结构中两个节点之间的最佳路径,解决了很多实际问题,如游戏中的NPC寻路、自动驾驶的路径规划等。
其中,A*算法(A-star algorithm)被广泛应用于寻路算法中,本文将对A*算法进行详细介绍。
A*算法是通过启发式算法(Heuristic Search)实现的一种寻路算法,根据估算函数(Heuristic Function)对节点进行评估,并选择具有最小开销的节点进行扩展。
A*算法的核心思想是综合考虑节点的实际开销(G 值)和预估的目标开销(H值),并选择最优节点进行。
在A*算法中,节点的开销是通过计算路径上节点的实际开销和预估开销得到的。
实际开销是指从起始节点到当前节点的移动开销,通常是节点间的距离或代价。
预估开销是通过估算函数对当前节点到目标节点的距离进行评估,常用的估算函数有欧几里得距离、曼哈顿距离等。
A*算法的具体步骤如下:1. 创建一个开启列表(Open List)和一个关闭列表(Closed List),起始节点放入开启列表。
2.从开启列表中选出具有最小开销的节点作为当前节点,并将其放入关闭列表中。
3.对当前节点的所有相邻节点进行遍历,如果该节点不可通过或者在关闭列表中,则忽略。
4.计算相邻节点的实际开销和预估开销,更新节点的G值和H值。
5.如果相邻节点不在开启列表中,将其加入开启列表,并将当前节点设置为该节点的父节点。
6.如果相邻节点已经在开启列表中,比较当前节点作为父节点时的G 值和之前的G值,如果小于之前的G值,更新节点的父节点为当前节点。
7.重复2-6步骤,直到达到目标节点或者开启列表为空。
8.如果达到目标节点,从目标节点开始回溯父节点,得到最佳路径。
A*算法的优势在于通过使用估算函数,能够快速找到目标节点,而且能够保证找到的路径是最佳路径。
同时,A*算法可以通过调整估算函数的权重来权衡的速度和路径的质量。
寻路算法发展史
寻路算法发展史
寻路算法是一种常见的算法,在许多领域中都有应用,尤其是在游戏领域。
以下是寻路算法的发展史:
- 宽度优先搜索算法:这是一种简单的寻路算法,它会优先扩展距离起始点最近的节点,然后再扩展相邻的节点,以此类推,直到找到目标点为止。
- Dijkstra 算法:这是一种基于图的寻路算法,它可以找到从起始点到目标点的最短路径。
该算法通过不断更新每个节点的最短路径,最终找到最短路径。
- 贪心算法:这种算法基于贪心策略,每次选择当前状态下的最优解,从而逐步接近目标点。
- A*搜索算法:这是一种启发式寻路算法,它通过评估每个节点的启发值来指导搜索方向,从而更快地找到目标点。
- B*搜索算法:这是一种改进的 A*算法,它考虑了路径的弯曲程度,从而更加准确地预测搜索方向。
随着寻路算法的不断发展和改进,其应用范围也不断扩大,在游戏、机器人、导航等领域都有着广泛的应用。
Unity3D

Unity3D 官⽅⽂档 NavMesh三个组件的翻译与解释⾃动寻路需要知道的细节版本:unity 5.4.1 语⾔:C#总起:最近研究的ARPG游戏中,敌⼈AI的寻路就使⽤到了NavMesh,Unity该套组件倒也不复杂:三个组件和⼀个烘培的Map。
我这边不讲基础怎么使⽤,主要是翻译⼀下各个组件的属性,说说需要注意的事情。
主要参考就是官⽅⽂档和⾃⼰在Unity中的⼀些实践。
NavMesh中实现了A*算法作为底层的算法,使⽤NavMesh Agent可以作为⾓⾊的⽬标路径查找代理,⽽NavMesh Obstacle则是动态的⼀些障碍物,Off-Mesh Link作为特殊路径点的连接,并且可以与Animator动画组件实现经过特殊路径的动画,⽐如开门,连接门内门外的路径点,并执⾏Animator中的开门动画,这样的需求就可以⽤Off-Mesh Link来实现。
寻路三⼤组件:♦NavMesh Agent:NavMeshAgent⽤于⾓⾊的寻路代理,可以在预先烘培的NavMesh中找到⽬标的⼀条路线,并且尽可能的规避其他的Agent 和Obstacle。
(直接官⽅贴图拿来⽤了)Radius Radius of the agent, used to calculate collisions between obstacles and other agents.agent的半径,⽤于计算该agent和其他agent、obstacle的碰撞。
Height The height clearance the agent needs to pass below an obstacle overhead.agent的⾼度,agent可以通过的头顶障碍最⼩⾼度。
Base offset Offset of the collision cylinder in relation to the transform pivot point.agent圆柱碰撞体中⼼点的偏移值。
navmesh 寻路算法步骤
一、介绍navmesh寻路算法1.1 什么是navmesh1.2 navmesh寻路算法的作用1.3 navmesh寻路算法的应用领域二、navmesh寻路算法的基本原理2.1 基于图的路径规划2.2 navmesh网格的构建2.3 寻路算法的实现三、navmesh寻路算法的步骤3.1 准备工作3.2 寻路起点和终点的指定3.3 寻路算法的执行3.4 路径的优化和平滑四、常用的navmesh寻路算法4.1 A*算法4.2 Dijkstra算法4.3 Floyd-Warshall算法五、navmesh寻路算法的优缺点5.1 优点5.2 缺点六、navmesh寻路算法在游戏开发中的应用6.1 游戏场景中的角色移动6.2 路径规划和本人行为控制6.3 实际应用案例分析七、结语一、介绍navmesh寻路算法1.1 什么是navmeshnavmesh是一种用于游戏开发中角色寻路的网格数据结构,它以三角形网格的形式表示游戏场景中的可行走区域,可以用于快速、高效地进行路径规划和寻路。
1.2 navmesh寻路算法的作用navmesh寻路算法可以帮助游戏中的角色实现智能的移动和路径规划,使游戏中的NPC、玩家角色等能够根据场景的实时变化自动调整移动路径,提升游戏的真实感和趣味性。
1.3 navmesh寻路算法的应用领域navmesh寻路算法广泛应用于游戏开发中,特别是3D游戏中的角色移动、本人行为控制等方面,也被用于虚拟仿真、建筑规划等领域。
二、navmesh寻路算法的基本原理2.1 基于图的路径规划navmesh寻路算法基于图的路径规划原理,将游戏场景中的可行走区域表示为一个有向图,角色的移动路径即为在这个图中的一条最优路径。
2.2 navmesh网格的构建navmesh网格的构建是navmesh寻路算法的基础,它通过对游戏场景中的可行走区域进行采样、三角化等处理,生成一个表示可行走区域的三角形网格。
2.3 寻路算法的实现navmesh寻路算法的核心是寻路算法的实现,常用的寻路算法包括A*算法、Dijkstra算法、Floyd-Warshall算法等,它们通过对navmesh网格进行搜索和路径评估,找到从起点到终点的最短路径。
寻路算法实验报告
一、实验目的1. 熟悉和掌握寻路算法的基本原理和实现方法;2. 了解不同寻路算法的优缺点和应用场景;3. 通过实际编程实现寻路算法,提高算法设计能力。
二、实验原理寻路算法是指在一个给定图中,寻找从起点到终点的一条路径的算法。
常见的寻路算法有深度优先搜索(DFS)、广度优先搜索(BFS)、A搜索等。
本实验将重点介绍A搜索算法,并对其原理进行详细阐述。
A搜索算法是一种启发式搜索算法,其核心思想是利用启发式函数来评估路径的优劣,从而在搜索过程中优先选择最有希望的路径。
A搜索算法的估价函数f(n)由两部分组成:g(n)表示从起点到当前节点n的实际代价,h(n)表示从当前节点n到终点d的估计代价。
A搜索算法的流程如下:1. 初始化:将起点加入开放列表(Open List),将终点加入封闭列表(Closed List);2. 循环:a. 从开放列表中选出f(n)最小的节点n;b. 将节点n从开放列表移除,加入封闭列表;c. 遍历节点n的邻居节点m;d. 如果m在封闭列表中,跳过;e. 如果m不在开放列表中,将m加入开放列表;f. 如果m在开放列表中,且新的g(n)小于原来的g(m),则更新m的f(n)、g(n)和父节点;3. 当终点被加入开放列表时,搜索结束。
三、实验内容1. 实现A搜索算法,并验证其在不同迷宫中的搜索效果;2. 对比A搜索算法与DFS、BFS算法在搜索效果和效率上的差异;3. 尝试改进A搜索算法,提高搜索效率。
四、实验步骤1. 设计迷宫数据结构,包括起点、终点和迷宫的宽度和高度;2. 实现A搜索算法,包括初始化、搜索过程和路径输出;3. 实现DFS和BFS算法,并与A搜索算法进行对比;4. 改进A搜索算法,如使用不同的启发式函数或优化搜索策略。
五、实验结果与分析1. A搜索算法在迷宫中的搜索效果:通过实验发现,A搜索算法在迷宫中能够找到一条最短路径,并且搜索效率较高。
在较复杂的迷宫中,A搜索算法仍能较快地找到路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Transit Node Routing based on Highway Hierarchies Peter Sanders Dominik SchultesRoute PlanningGoals:exact shortest(i.e.fastest)paths in large road networks fast queriesfast preprocessinglow space consumptionApplications:route planning systems in the internetcar navigation systems···Motivation‘Problem’:existing solutions are already‘too fast’.Example:perform a query(using hwy.hierarchies):≈1msvisualise the path(using our Java application):≈400msCounter-Argument:applications that require a lot of queries(and only a few paths)massive traffic simulationsoptimisations in logistics systemsKarlsruhe→CopenhagenKarlsruhe→BerlinKarlsruhe→ViennaKarlsruhe→MunichKarlsruhe→RomeKarlsruhe→ParisKarlsruhe→LondonKarlsruhe→BrusselsKarlsruhe→CopenhagenKarlsruhe→BerlinKarlsruhe→ViennaKarlsruhe→MunichKarlsruhe→RomeKarlsruhe→ParisKarlsruhe→LondonKarlsruhe→BrusselsFirst ObservationFor long-distance travel:leave current locationvia one of only a few‘important’traffic junctions,called access points( we can afford to store all access points for each node) [in Europe:about10access points per node on average]Karlsruhe→BerlinKarlsruhe→BerlinKarlsruhe→BerlinSecond ObservationEach access point is relevant for several nodes.union of the access points of all nodes is small,called transit node set( we can afford to store the distances between all transit node pairs) [in Europe:about10000transit nodes]Transit Node RoutingPreprocessing:identify transit node set T⊆Vcompute complete|T|×|T|distance tablefor each node:identify its access points(mapping A:V→2T),store the distancesQuery(source s and target t given):computed top(s,t):=min{d(s,u)+d(u,v)+d(v,t):u∈A(s),v∈A(t)}Transit Node RoutingLocality Filter:local cases must befiltered( special treatment) L:V×V→{true,false}¬L(s,t)implies d(s,t)=d top(s,t)ExampleRelated Workseparator-based implementation[Müller et al.2006]–determine separator nodes(=transit nodes)–partition the graph into small components–access points of node u:border nodes of u’s component–localityfilter:“same component?”grid-based implementation[Bast,Funke,Matijevic2006]–compute geometric subdivision of the network into cells–access points:border nodes needed for‘long-distance’travel–transit nodes:union of all access points–localityfilter:“less than a certain number of grid cells apart?”Our Approach:Highway Hierarchies1complete search within a local areasearch in a (thinner )highway network =minimal graph that preserves all shortest pathscontract network,e.g.,iterate highway hierarchyExample:Karlsruhe123Local Areachoose neighbourhood radius r(s)(by a heuristic)define neighbourhood of sN(s):={v∈V|d(s,v)≤r(s)}Highway NetworkEdge(u,v)belongs to highway network iff there are nodes s and t s.t.(u,v)is on the“canonical”shortest path from s to tand(u,v)is not entirely within N(s)or N(t)ContractionDistance Table:Search Space ExampleDistance TableCompute an all-pairs distance tablefor the core of the topmost levelℓ.13465×13465entriesAbort the search when all entrance points in thecore of levelℓhave been encountered.≈55for each direction Use the distance table to bridge the gap.≈55×55entriesHH-based Transit Node RoutingCompute an all-pairs distance tablefor the core of the topmost levelℓ.13465×13465entries transit node set TAbort the search when all entrance points in thecore of levelℓhave been encountered.≈55for each direction do not‘search’,just perform look-upsUse the distance table to bridge the gap.≈55×55entriesMissing Pieces1.localityd(s,t)=d u(s,t)<d top(s,t) L(s,t):=“disks of s and t overlap”Missing Pieces2.too many‘entrance points’(55)solution:fall back on comparatively few‘access points’(10) (motivated by the observations from[Bast,Funke,Matijevic2006])Missing Piecespute top distance table in the original graphsolution:[Knopp,S,S,Schulz,Wagner2007]“Computing Many-to-Many Shortest PathsUsing Highway Hierarchies”(e.g.10000×10000table in one minute)for each t∈T,perform backward search up to top levelℓ,store search space entries(t,u,d(u,t))arrange search spaces:group entries by ufor each s∈T,perform forward search,at each node u,scan all entries(t,u,d(u,t))andcompute d(s,u)+d(u,t)Second Layer(to deal with medium range queries)secondary transit node set T2⊃Tsecondary access mapping A2:V→2T2d(u,v):u,v∈T2∧d(u,v)=d top(u,v) secondary dist.tablesecondary localityfilter L2¬L2(s,t)impliesd(s,t)=d top(s,t)ORd(s,t)=min{d(s,u)+d(u,v)+d(v,t):u∈A2(s),v∈A2(t)}Two Concrete VariantsPreprocessingfor each secondary transit node t∈T2:–perform backward highway search–stop at primary transit nodes( set of backward access points)–store search space entries(t,u,d(u,t))arrange search spacesPreprocessingfor each secondary transit node s∈T2:–perform forward highway search–stop at primary transit nodes( set of forward access points)–at each node u and for each search space entry(t,u,d(u,t)):∗compute distance d u(s,t):=d(s,u)+d(u,t)via u∗compute distance d top(s,t)via top layer∗if d u(s,t)<d top(s,t)then·add entry d u(s,t)to the secondary distance table·ensure that the disks around s and t contain u(use similar procedure for lower layers)ExperimentsW.Europe(PTV)USA(TIGER/Line)#nodes#directed edges#road categoriesspeed range[km/h]Preprocessinglayer2|T||A|space timeUSA timeeco184379 4.910674 5.72443:25 dist eco10235210.9EUR timeeco118356 5.5112939.92512:44 dist eco6977513.1Querylayer2[%]wrong cont’d time0.14 1.1311.5µs gen0.00140.01381.578.1087.5µs0.54 2.8713.4µs gen0.00150.01904.6818.32107.4µsDijkstra RankQ u e r y T i m e [µs ]2526272829210211212213214215216217218219220221222223224510204010030010005102040100300100Local Queries:USA,travel time metricDetermine Shortest Pathsfrom source s,look iteratively for the next adjacent node s′thatleads to fwd acc pnt ud(s,s′)+d(s′,u)=d(s,u)analogously,from target to bwd acc pntfrom fwd acc pnt u,look iteratively for the next adjacent node u′in the topmost level that leads to bwd acc pnt vd(u,u′)+d(u′,v)=d(u,v)(if necessary,use a hidden path instead)unpack shortcutsif path not through top layer,fall back on highway query。