算法设计与分析作业-分支定界算法
算法分析与设计实验五分枝―限界算法

算法分析与设计实验五分枝―限界算法1、实现0/1背包问题的lc分枝―限界算法,要求使用大小固定的元组表示动态状态空间树,与0/1背包问题回溯算法做复杂性比较。
2、实现货郎担问题的分枝―限界算法并与货郎担问题的动态规划算法做复杂性比较比较。
3.实现了带截止期作业排序的分枝定界算法,并与带截止期作业排序的贪心算法进行了复杂度比较。
(选择一项完成)实验六分枝―限界算法实验目的1.掌握分枝―限界的基本思想方法;2.了解适合用分枝定界法求解的问题类型,并能设计相应的动态规划算法;3.掌握分枝定界算法的复杂性分析方法,分析问题的复杂性。
预习与实验要求1.预习实验教学和教材的相关内容,掌握分支定界的基本思想;2.严格按照实验内容进行实验,养成良好的算法设计和编程习惯;3.认真听,服从安排,独立思考,完成实验。
实验设备与器材硬件:PC软件:c++或java等编程环境实验原理分枝―限界算法类似于回溯法,也是一种在问题的解空间树上搜索问题解的算法。
但两者求解方法有两点不同:第一,回溯法只通过约束条件剪去非可行解,而分枝―限界法不仅通过约束条件,而且通过目标函数的限界来减少无效搜索,也就是剪掉了某些不包含最优解的可行解;第二,在解空间树上,回溯法以深度优先搜索,而分枝―限界法则以广度优先或最小耗费优先的方式搜索。
分枝―限界的搜索策略是,在扩展节点处,首先生成其所有的儿子结点(分支),然后再从当前的活结点表中选择下一个扩展结点。
为了有效地选择下一扩展结点,以加速搜索进程,在每一活结点处,计算一个函数值(限界),并根据这些已计算出的函数值从当前活结点表中选择一个最有利的结点做为扩展,使搜索朝着解空间树上最优解的分支推进,以便尽快找出一个最优解。
分枝定界法通常以广度优先或最小代价优先的方式搜索问题的解空间树(问题的解空间树是表示问题所有空间的有序树,常见的是子集树和排序树)。
在搜索问题的解空间树时,分枝定界法的每个活动节点只有一次机会成为扩展节点。
分枝定界法

4
x1
x2 x1
16.5 4
x1 0, x2 0
结论1 :(IP)的最优解一定在某个子问题中
2 :子问题的可行域 父问题的可行域 子问题的最优解 ≤ 父问题的最优值
3 :子问题中的整数解都是(IP)的可行解
二: 定界,以每个后继问题为一分枝标明求解结 果,在解的结果中,找出最优目标函数值最大者作 为新的上界.从已符合整数条件的各分支中,找出 目标函数值为最大者作为新的下界,若无,则下界 为0.
x1 x2 x3 x4 x5 解
检 0 0 -20/3 0 -50/3 Z-440/3
x2 0
x1 1 x4 0
1 1/3 0
00
0
0 -1/3 1
-2/3 17/6 13 -10/3 5/3
L1最优解:x1 3,x2 17 6 , x3 0
x4
5 3
,
x5
0,
最优值:z1
440 3
求解子问题L3 :
x1 x2 x3
检 0 0 -20/3
x2 0 1 1/3 x1 1 0 0 x4 0 0 -1/3
x6 0 1 0
x4 x5
x6
0 -50/3 0
00 1
解 Z-440/3 17/6 3 5/3
2
最优解:
xx14
35,/ 2x,2 x52, x03,
11 4,x2 0,x4
3, 52,
z3 130 得下界
x5 14 , x6 0
z4
285 2
z3
L5
:x1 x3
2,x2 0,x4
分支定界算法
分支定界算法
分支定界算法(Branch and Bound Algorithm)是一种以穷举搜索方式解决多项选择问题(Multiple Choice Problem)的算法。
它是一种深度优先(Depth-First)搜索算法,通过在搜索树上建立一种叫做“定界函数”的辅助函数来记录搜索树的叶子节点(Leaf Node)状态,从而剪枝,从而达到节省时间的目的。
基本思想:在搜索树的每一层,先将该层所有可能的节点都搜索一遍,如果发现某一个节点存在更好的解,就把这个节点的值作为“定界函数”的值,然后对于后续搜索而言,如果发现某一节点的值比“定界函数”的值还要差,就不必再继续搜索下去,因为这样的节点是不可能得到更好的解的。
步骤:
(1)将根节点加入到搜索树中,并设定当前最优解为最大值(或最小值)。
(2)从根节点开始,对搜索树中每一个节点进行搜索。
(3)如果发现某一节点的值比当前最优解还要优,则更新当前最优解;如果发现某一节点的值比当前最优解差,则可以放弃搜索这个节点的子树,即剪枝。
(4)重复步骤2和步骤3,直到搜索树中所有叶子节点都被搜索完毕,则找到了最优解。
分支定界法
分支定界法第一篇:分支定界法整数线性规划之分支定界法摘要最优化理论和方法是在上世纪 40 年代末发展成为一门独立的学科。
1947年,Dantaig 首先提出求解一般线性规划问题的方法,即单纯形算法,随后随着工业革命、计算机技术的巨大发展,以及信息革命的不断深化,到现在的几十年时间里,它有了很快的发展。
目前,求解各种最优化问题的理论研究发展迅速,例如线性规划、非线性规划以及随机规划、非光滑规划、多目标规划、几何规划、整数规划等,各种新的方法也不断涌现,并且在军事、经济、科学技术等方面应用广泛,成为一门十分活跃的学科。
整数规划(integer programming)是一类要求要求部分或全部决策变量取整数值的数学规划,实际问题中有很多决策变量是必须取整数的。
本文主要介绍求解整数线性规划问题的分支定界法及其算法的matlb实现。
关键词:整数线性规划;分支定界法;matlb程序;1.引言1.1优化问题发展现状最优化理论与算法是一个重要的数学分支,它所讨论的问题是怎样在众多的方案中找到一个最优的方案.例如,在工程设计中,选择怎样的设计参数,才能使设计方案既满足要求又能降低成本;在资源分配中,资源有限时怎样分配,才能使分配方案既可以满足各方面的要求,又可以获得最多的收益;在生产计划安排中,怎样设计生产方案才能提高产值和利润;在军事指挥中,确定怎样的最佳作战方案,才能使自己的损失最小,伤敌最多,取得战争的胜利;在我们的生活中,诸如此类问题,到处可见.最优化作为数学的一个分支,为这些问题的解决提供了一些理论基础和求解方法.最优化是个古老的课题.长期以来,人们一直对最优化问题进行着探讨和研究.在二十世纪四十年代末,Dantzig 提出了单纯形法,有效地解决了线性规划问题,从而最优化成为了一门独立的学科。
目前,有关线性规划方面的理论和算法发展得相当完善,但是关于非线性规划问题的理论和算法还有待进一步的研究,实际应用中还有待进一步的完善。
运筹学_分支定界法
⑵
5 x1 6 x 2 3 0
x2
A 3 B
⑴x
1
x2 2
⑶
x1 4
1
1
3
x1 5 x 2 Z
x1
求(LP2) ,如图所示。
m a x Z x1 5 x 2 x1 x 2 2 5 x 6 x2 30 1 ( IP 2 ) x 1 4 x 2 1 x1 , x 2 0 且 为 整 数
x1 x 2 2 x1 x 2 2 5 x 6 x2 30 5 x 6 x2 30 1 1 x1 x1 4 4 ( IP 2 2 ) ( IP 2 1) 2 2 x1 x1 x x 4 3 2 2 x1 , x 2 0 且 为 整 数 x1 , x 2 0 且 为 整 数
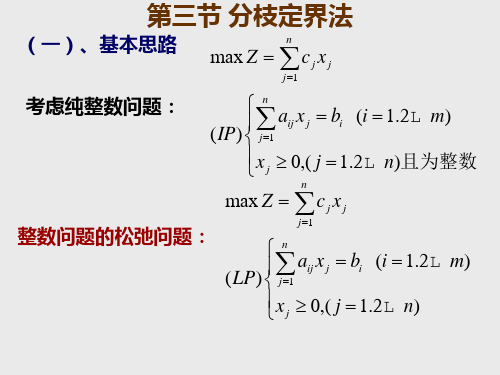
第三节 分枝定界法
(一)、基本思路 考虑纯整数问题:
m ax Z
n
c
j 1
n
j
xj
a ij x j b i ( i 1 .2 m ) ( IP ) j 1 x 0 ,( j 1 .2 n ) 且 为 整 数 j
m ax Z
c
j 1
n
记为(IP)
解:首先去掉整数约束,变成一般线性规划问题
m a x Z x1 5 x 2 x1 x 2 2 5 x1 6 x 2 3 0 4 x1 x ,x 0 1 2
记为(LP)
用图解法求(LP)的最 优解,如图所示。
m a x Z x1 5 x 2 x1 x 2 2 5 x1 6 x 2 3 0 4 x1 x ,x 0 1 2
5.2 分支定界法

LP
用图解法求松弛问题的最优解,如图所示。
x1=18/11, x2 =40/11 Z=-218/11≈(-19.8) 即Z 也是IP最小值的下限。 对于x1=18/11≈1.64,
分枝定界法注意事项:
(1)、分枝变量选择原则: ① 按目标函数系数:选系数绝对值最大者变 量 先分。
对目标值升降影响最大。
② 选与整数值相差最大的非整数变量先分枝。
③ 按使用者经验,对各整数变量排定重要性
的优先顺序。
(2)、分枝节点选择:
① 深探法(后进先出法):
最后打开的节点最先选,尽快找到整数解。 整数解质量可能不高。 ② 广探法: 选目标函数当前最大值节点,找到的整数 解质量高。慢。
max Z 4 x1 3 x 2
10
B
LP2:X=(4,6.5), Z2=35.5
LP1 LP2 o 3 4 C ①
1.2 x1 0.8 x 2 10 2 x1 2.5 x 2 25 LP 2 : x1 4 x1 , x 2 0
②
x2
选 择 目 标 值 最 大 的 分 LP 枝 2进 行 分 枝 , 增 加 约 束 x 2 6及x 2 7, 显 然 x 2 7不 可 行 , 得 到 线 性 规 划
例5.6 用分枝定界法求解整数规划问题
min Z x1 5 x 2 x 1 x 2 2 IP 5 x1 6 x 2 30 4 x1 x1 , x 2 0且 全 为 整 数
解:首先去掉整数约束,变成一般线性规划问题(原整数规划 问题的松驰问题)
最短路径问题的分支定界算法

最短路径问题的分支定界算法最短路径问题是图论中的重要问题之一,它在许多实际应用中具有广泛的意义。
为了解决最短路径问题,我将介绍一种有效的算法——分支定界算法。
一、问题描述最短路径问题是要找到图中两个顶点之间的最短路径。
给定一个带权有向图,其中顶点表示路径上的地点,边表示路径的长度。
我们需要找到从起点到终点的最短路径。
二、分支定界算法原理分支定界算法是一种穷举搜索算法,通过分解问题的解空间,并确定每个子问题的解上下界,以逐步缩小搜索空间。
以下是分治定界算法的基本步骤:1. 初始化a. 定义一个队列,用于存放候选路径;b. 设置初始最短路径长度为正无穷;c. 将起点加入队列。
2. 分支定界a. 从队列中取出当前路径,并计算路径长度;b. 如果当前路径长度大于等于当前最短路径长度,则剪枝,继续下一个路径;c. 如果当前路径的终点是目标终点,则更新最短路径长度和最短路径,继续下一个路径;d. 否则,扩展当前路径,将其邻节点添加到队列中。
3. 终止条件a. 当队列为空时,终止搜索,得到最短路径。
三、算法实现以下是使用分支定界算法解决最短路径问题的伪代码:```初始化队列;初始化最短路径长度为正无穷;将起点加入队列;while (队列非空) {取出当前路径,并计算路径长度;if (当前路径长度大于等于当前最短路径长度) {剪枝,继续下一个路径;}if (当前路径的终点是目标终点) {更新最短路径长度和最短路径;继续下一个路径;}扩展当前路径,将其邻节点添加到队列中;}返回最短路径;```四、案例分析为了更好地理解分支定界算法的应用,我们以一个简单的案例来说明。
假设有一个城市地图,其中包含多个地点,我们需要找到从起点到终点的最短路径。
首先,我们将起点添加到队列,并初始化最短路径长度为正无穷。
然后,通过不断从队列中取出路径,并计算路径长度,进行分支定界操作。
在每一步分支定界操作中,我们根据当前路径长度与最短路径长度的比较,以及当前路径终点是否为目标终点,来进行剪枝或更新最短路径。
3.2分枝定界法

L 3 : x = 3,x = 2, 1 2 L 4 x1 = 11 4,x2 = 3, : x3 = 5 / 2,x4 = 5 / 2, x3 = 0,x4 = 5 , x5 = 0, x6 = 0 2 z 3 = 130 得下界 x5 = 1 , x 6 = 0 4 z 4 = 285 ≥ z 3 2
x6
0 0 0 0
1
解 Z-440/3 17/6 3 5/3 -1/6
解 Z-440/3 17/6 3 5/3
x2 x1 x4
最优解: x1 = 11 ,x2 = 3, x3 = 0, 4 5 ,x = 1 , x = 0 x4 = 2 5 4 6 最优值:z 3 = 285 2
x3
-15 0 1/2 -2 -1/2
分枝定界法计算过程:
讨论松弛问题 L 0 : 1、 L0无最优解, 则(IP )无最优解 结束
上界
2、最优解 X *0 = ( x *01 , x *02 , , x * on ), 最优值 z 0 (1) X *0 为整数解 ,则X *0 为( IP)的最优解 结束 ( 2 ) X * 0 中至少有一个是分数,设x *01 是分数 :分枝
混合型
L 0 : x1 = 3.5,x 2 = 2.5, x3 = 0,x 4 = 0, z 0 = 155
松弛问题 L 0 ; max z = 30 x 1 + 20 x 2 2 x 1 + 3 x 2 + x 3 = 14 . 5 s .t 4 x 1 + x 2 + x 4 = 16 . 5 x1 , x 2 , x 3 , x 3 ≥ 0 L0的最优单纯型表:
剪枝
L6 :
求解子问题 L1 :
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.问题重述利用分支定界算法求解从甲地(Num.1)到乙地(Num.50)的最短路径,且需要满足花费小于1500。
一共有50座城市,城市之间相连的有向路径长度由M1.txt给出,9999代表不连通;城市之间有向路径的花费由M2.txt给出。
2.算法设计构建状态树,树上每个节点记录状态,从出发点到当前节点的距离length、花费cost、路径path[];从节点i,经过可行边到节点j。
搜索操作若某个节点没有被剪枝掉,即存在最优解的可能,进行下一步搜索。
对于当前节点i,分别去搜索每一个从该点出发的边,若边的长度不是9999,且边的另一边的点并没有被访问过,且扩展点后的状态满足要求,则拓展该点信息,根据当前状态计算该点状态,继续搜索。
剪枝操作设从节点i到终点的最少花费为minCost[i],若当前花费curCost+ minCost[i]>1500,则进行剪枝;同理,若从节点i到终点的最短长度为minLen[i],若当前长度curLen+minLen[i]>bestLen,则进行剪枝。
当扩展边时,若目标点已经被扩展过、当前花费curCost+edge.cost> 1500、curLen+edge.len>bestLen,则进行剪枝。
更新答案当搜索到终点时,若当前解满足条件且更优,则更新答案(包括花费、长度、路径)。
3.算法实现和结果伪代码dfs(int curPoint)// dfs搜索,分支定界算法// 输入:当前节点curPoint// 输出:无,但是会更新全局变量最优解// 到达终点if curPoint = 终点if curCost满足要求 && curLen满足要求更新最优解endreturn;end// 剪枝//(其中curPoint到终点的最小花费和最小长度通过dijstra算法预处理得到)if 当前花费 + curPoint到终点最小花费 > 1500 || 当前长度 + curPoint到终点最小长度 > 最优长度 return;end// 搜索for 边e in curPoint的所有有效边if e.end未被访问 && 当前花费 + e.cost <= 1500 && 当前长度 + e.len <= 最优长度e.end被访问;当前花费 += e.cost;当前长度 += e.len;当前路径添加 e.end;dfs(e.end);e.end未被访问;当前路径删除 e.end;当前花费 -= e.cost;当前长度 -= e.len;endend预处理为了获得各个点到终点的最短长度和最小花费,且只需要获得该数据,为了达到更好的时间复杂度,因此使用优先队列优化的dijstra算法,利用反向图,得到终点到任意点的最短长度和最小花费,从而得到各个点到终点的最短长度和最小花费。
该预处理算法的时间复杂度为O(ElogV)。
代码运行环境和结果运行环境:●操作系统:macOS Ventura13.2.1●构建工具:cmake version 3.25.2;GNU Make 3.81●构建命令:cmake CMakeLists.txt && make●运行命令:./algorithm_assignment_1运行结果:bestCost: 1448bestLen: 464bestPath: 1->3->8->11->15->21->23->26->32->37->39->45->47->50重复两千次的情况下:(更多请参考代码文件:main.cpp)所用时间(macos、1.4 GHz 四核Intel Core i5、release版本)time: 2309.51mstime: 2.30951e+06clocks结果截图:4.附录-代码/** encoding: utf-8* */#include<iostream>#include<fstream>#include<utility>#include<vector>#include<queue>#include<cstring>// 城市的数量、最大的花费、最大的距离const int cityNum = 50, maxCost = 1500, maxLen = 9999;// 定义边集,在其中搜索;其中reverseEdge是反向边集,用于dijkstra算法struct Edge {int start;int end;int cost;int len;} orderEdge[cityNum][cityNum], reverseEdge[cityNum][cityNum];// 从点i有多少条边int orderEdgeNum[cityNum], reverseEdgeNum[cityNum];// 初始化,得到点i到终点的最短距离和最小花费int minCost[cityNum], minLen[cityNum];// 是否已经搜索过这个点int visitPoint[cityNum];// 记录当前花费、距离和路径int curCost, curLen, curPath[cityNum + 1];// 记录最优花费、距离和路径int bestCost, bestLen, bestPath[cityNum + 1];// 读取数据void readData() {// 请注意,这里的路径是相对于可执行文件的路径std::ifstream fin1("./m1.txt");std::ifstream fin2("./m2.txt");int tmpLen, tmpCost;for (int i = 0; i < cityNum; i++) {for (int j = 0; j < cityNum; j++) {fin1 >> tmpLen;if (tmpLen < maxLen) {orderEdge[i][orderEdgeNum[i]].start = i;orderEdge[i][orderEdgeNum[i]].end = j;orderEdge[i][orderEdgeNum[i]].len = tmpLen;fin2 >> orderEdge[i][orderEdgeNum[i]].cost;reverseEdge[j][reverseEdgeNum[j]].start = j;reverseEdge[j][reverseEdgeNum[j]].end = i;reverseEdge[j][reverseEdgeNum[j]].len = tmpLen;reverseEdge[j][reverseEdgeNum[j]].cost = orderEdge[i][orderEdgeNum[i]].cost;orderEdgeNum[i]++;reverseEdgeNum[j]++;} else {fin2 >> tmpCost;}}}fin1.close();fin2.close();// 初始化,获得每个点到终点的最短距离和最少花费void dijstra_q(bool isLen = true) {typedef std::pair<int, int> PII;std::priority_queue<PII, std::vector<PII>, std::greater<>> q;q.emplace(0, cityNum - 1);minLen[cityNum - 1] = 0;minCost[cityNum - 1] = 0;if (isLen) {while (!q.empty()) {PII p = q.top();q.pop();int v = p.second;if (minLen[v] < p.first) {continue;}// 更新for (int i = 0; i < reverseEdgeNum[v]; i++) {Edge e = reverseEdge[v][i];if (minLen[e.end] > minLen[e.start] + e.len) {minLen[e.end] = minLen[e.start] + e.len;q.emplace(minLen[e.end], e.end);}}}} else {while (!q.empty()) {PII p = q.top();q.pop();int v = p.second;if (minCost[v] < p.first) {continue;}for (int i = 0; i < reverseEdgeNum[v]; i++) {Edge e = reverseEdge[v][i];if (minCost[e.end] > minCost[e.start] + e.cost) {minCost[e.end] = minCost[e.start] + e.cost;q.emplace(minCost[e.end], e.end);}}}}// 初始化void init() {memset(orderEdgeNum, 0, sizeof(orderEdgeNum));memset(reverseEdgeNum, 0, sizeof(reverseEdgeNum));memset(minCost, 0x7f, sizeof(minCost));memset(minLen, 0x7f, sizeof(minLen));memset(visitPoint, 0, sizeof(visitPoint));memset(curPath, 0, sizeof(curPath));curPath[0] = 1;memset(bestPath, 0, sizeof(bestPath));bestPath[0] = 1;curCost = 0;curLen = 0;bestCost = maxCost;bestLen = maxLen;readData();dijstra_q(true);dijstra_q(false);}// dfs搜索void dfs(int curPoint) {// 到达终点if (curPoint == cityNum - 1) {if ((curLen < bestLen && curCost <= maxCost) || (curLen == bestLen && curCost < bestCost)) { bestCost = curCost;bestLen = curLen;memcpy(bestPath, curPath, sizeof(curPath));}return;}// 剪枝if (curCost + minCost[curPoint] > maxCost || curLen + minLen[curPoint] > bestLen) { return;}// 搜索for (int i = 0; i < orderEdgeNum[curPoint]; i++) {Edge e = orderEdge[curPoint][i];if (visitPoint[e.end] == 0 && curCost + e.cost <= maxCost && curLen + e.len <= bestLen) { visitPoint[e.end] = 1;curCost += e.cost;curLen += e.len;curPath[++curPath[0]] = e.end;dfs(e.end);visitPoint[e.end] = 0;curCost -= e.cost;curLen -= e.len;curPath[0]--;}}}// 打印结果void printResult() {std::cout << "bestCost: " << bestCost << std::endl << "bestLen: " << bestLen << std::endl;std::cout << "bestPath: ";for (int i = 1; i <= bestPath[0]; i++) {std::cout << bestPath[i] + 1;if (i != bestPath[0]) {std::cout << "->";}}std::cout << std::endl;}int main() {/*int num = 2000;clock_t startTime = clock();for (int i = 0; i < num; ++i) {init();dfs(0);}clock_t endTime = clock();std::cout << "time: " << (double) (endTime - startTime) / CLOCKS_PER_SEC * 1000 << "ms" << std::endl;std::cout << "time: " << (double) (endTime - startTime) << "clocks" << std::endl;*//* 重复2000次,所用时间(macos、1.4 GHz 四核Intel Core i5、release版本)* time: 2309.51ms* time: 2.30951e+06clocks* bestCost: 1448* bestLen: 464* bestPath: 1->3->8->11->15->21->23->26->32->37->39->45->47->50*/init();dfs(0);printResult();return0;}。