直流电动机的优化滑模变结构控制
无刷直流电机滑模变结构控制策略研究
2 0 1 6年 8月
齐
鲁
工
业
大
学
学
报
Vo I . 3 0 NO . 4 Aug . 2 01 6
J O U R N A L O F Q I L U U N I V E R S I T Y O F T E C H N O L O G Y
文章编号 : 1 0 0 4 - 4 2 8 0 l 2 o  ̄ 6 } o 4 — 0 0 5 5 — 0 5
D O I : 1 0 . t 6 4 4 2 / i . c n I ‘ i . q l 帮d x x b . 2 0 1 6 . 0 4 . 0 1 2
无刷 直流 电机滑模变结构控制 策略 研究
柴 俊, 李 坤, 过 磊
( 江苏联合职业技术学院 无锡机 电分 院 . 江苏 无锡 2 t 4 o 2 8 )
"
-
a n d t he pr i n c i p l e o f s l i d i n g mo d e v a r i a b l e s t r u c t u r e i s a p p l i e d t o t he s p e e d c o n t r o l s y s t e m o f BL DCM.T h e
s l i d i n g mo d e v a r i a b l e s t r u c t u r e c o n t r o l s r t a t e g y i s d e s i g n e d a n d c o mp a r e d wi t h t h e t r a d i t i o n a l P I D c o n t r o l
性 能 上展 现 出极 大 的优 势 。 仿 真 试 验 表 明 , 该 滑模 变 结 构 控 制 策 略 具 有 较 快 的 响 应 速 度 、 较 强 的抗 负 载 扰 动 能 力
无刷直流电机的滑模控制器的设计与仿真
摘要舵伺服系统在航空航天领域,有着广泛应用和重要的研究价值。
应用无刷直流电机作为舵系统执行器,可以增大系统输出转矩,实现系统小型化。
本文基于无刷直流电机执行器,利用 DSP 与 FPGA 结合的核心处理单元,应用滑模变结构控制策略,实现舵机系统伺服,提高舵系统抗扰性和信号响应的快速性;并在系统中加入滑模观测器,实现对于系统内部状态量的观测,为实现无位置传感器控制提供条件本文应用无刷直流电机作为舵系统执行器,通过分析和设计滑模变结构控制算法,实现舵系统位置伺服控制,利用滑模变结构控制策略的特性,提高系统对于扰动和内部参数摄动的鲁棒性,与基于传统控制策略的伺服机构相比,系统的抗扰性得到了提高。
并在系统中引入滑模观测器,利用电流、电压传感器采样相电流和相电压作为该观测器的给定量,观测出电机的速度,转子运动换相位置信号和三相反电动势波形,从而实现电机的无位置传感器控制。
本文通过分析舵伺服机构的主要结构和工作原理,根据实际系统技术要求,设计出基于电动伺服系统的数字控制器。
利用 DSP 强大的数据处理能力和 FPGA 并行运算能力,实现设计的控制算法,提高舵系统的性能。
通过 MATLAB 中 Simulink 环境下构建理想系统模型,应用滑模控制算法,进行模型仿真。
通过系统仿真分析,设计出满足离散系统的滑模控制器参数。
通过 DSP 与 FPGA 结合的核心处理单元实现滑模变结构控制算法,应用于舵伺服系统中[1]。
最后,通过完成整体硬件与软件平台设计,实现对舵伺服系统的控制。
通过仿真和实验结果分析,验证了滑模控制具有强鲁棒性和抗扰性,满足舵系统对于快速性和抗扰性的技术要求,提高了系统整体控制性能。
关键字:滑模控制;滑模观测器;无刷直流电机;舵伺服系统;DSP+FPGABrushless dc motor of the sliding mode controller designand simulationAbstractRudder servo system is used in the aerospace field, it has important research value. Using BLDCM as the rubber system actuator, it will improve the system’s output torque, and achieve system’s miniaturization. Based on BLDCM actuator, combined DSP and FPGA as the core processing unit, using the strategy of sliding mode variable structure control achieve the rubber servo system which improve the robustness for disturbances and the speed for signal response. Adding sliding mode observer in the system realize the observation of internal system state which provide reliable parameters for the realization of position sensorless controlThrough a brief analysis of rudder servo on both the main structure and working principle, based on the actual system technical requirements, this paper designs a digital controller which is based on electric servo system. Using DSP and FPGA as the core control unit, and the strong ability of DSP data processing and the ability of FPGA parallel computing , achieve the design of control algorithms, and improve performance of rubber systemUsing BLDCM as the servo system actuator, through analysis and designing the algorithm of sliding mode control, this paper achieves the position servo control in rubber system. Using the characteristic of sliding mode variable structure improve the robustness for disturbance and inner parameters transformation. Compared with the control strategy based on traditional servo system, it improves the immunity of servo system. And addingsliding mode observer in the system, use circuit sensors and voltage sensors sample phase circuit and phase voltage as the giving quantities to observer. This paper rely on observer getting the motor’s speed, moving rotor’s changing phase position signal and three-phases waveforms of back-EMF, so that achieve the sensorless motor control Using Simulink in MATLAB build the ideal mode of the real system and the algorithms of sliding mode, and carry out mode simulation.Through the system simulation, design a sliding mode controller which meet the parameters of discrete systems, and through the combination of DSP and FPGA core processing unit realize control algorithm, which is applied to the rudder servo system. At last, finishing the design of whole hardware and software, realize the control of rubber servo system. Through the simulation and experiment, testified sliding mode control has strongly robustness and immunity for disturbance. This meets the rubber system’s technology requirements including rapid and immunity for disturbance, and improves overall system’s control performanc eKeywords:Sliding mode control,Sliding mode observer,BLDCM,Rubber servo system,DSP+FPGA目录摘要 (I)Abstract.................................................................................................................................................... I I 第1章绪论. (1)1.1 课题背景及研究的目的和意义 (1)1.2 国内外伺服研究现状 (2)1.3 无刷直流电机控制方法 (2)1.3.1 传统的控制方法 (3)1.3.2 模糊控制方法 (3)1.3.3 鲁棒控制方法 (3)1.3.4 神经网络控制方法 (4)1.3.5 自适应控制方法 (4)1.3.6 滑模变结构控制方法 (4)1.4 伺服系统应用的主要问题 (5)1.5 课题研究的主要内容 (6)第2章伺服系统的构成与数学模型 (8)2.1 伺服系统的总体结构 (8)2.1.1 无刷直流电机的选择 (9)2.1.2 伺服系统驱动方式 (9)2.2 无刷直流电机的工作原理 (9)2.3 无刷直流电机数学模型 (15)2.3.1 无刷直流电机的方程 (15)2.3.2 无刷直流电机的状态方程 (16)2.3.3 无刷直流电机的电磁转矩方程 (16)2.3.4 无刷直流电机的运动方程 (17)2.3.5 无刷直流电机的机械特性 (17)第3章滑模变结构理论 (18)3.1滑模变结构控制的基本原理 (18)3.2滑模运动及其存在和到达条件 (19)3.3滑模变结构控制 (19)3.3.1滑模变结构控制器设计 (19)3.3.2切换函数的设计 (19)3.3.3控制律的设计 (20)3.4抖振改善 (20)第4章基于滑模变结构的控制系统设计 (21)4.1 滑模控制器 (21)4.2 滑模观测器 (26)4.3 系统仿真与结果分析 (28)4.4 本章小结 (34)第五章结论 (35)参考文献 (38)谢辞 (40)第1章绪论1.1课题背景及研究的目的和意义随着科技的发展,伺服系统应用领域更加广泛,主要应用于智能机床、机器人、导弹制导以及船舶、车辆的自驾驶,可以说是实现未来工业全自动智能化必不可少的环节。
直流脉宽调速系统滑模变结构控制

直流脉宽调速系统滑模变结构控制
吴秀珍;邵雪卷
【期刊名称】《计算机仿真》
【年(卷),期】2015(032)005
【摘要】在直流电机调速系统优化控制的研究中,针对常规滑模变结构控制的双闭环直流调速系统在添加负载扰动后转速响应存在静差的问题.为解决上述问题,提出了考虑扰动在内的转速环滑模变结构控制方案.由于扰动补偿作用的加入加大了电流给定的抖动,使回路电流脉动较大,在上述设计的基础上,在控制器输出添加了滤波器,有效的解决了上述问题.通过MATLAB仿真验证后,在dSPACE DS1103单板系统的支持下,将所设计的控制器与实际电机相连,通过在线调节参数,获取理想曲线.实验结果表明所设计的滑模控制器(smc)具有较好的鲁棒性,系统转速无超调,电流较平滑,抗扰能力较强,为直流电机调速系统优化提供了参考.
【总页数】4页(P403-406)
【作者】吴秀珍;邵雪卷
【作者单位】太原科技大学电子信息工程学院,山西太原030024;太原科技大学电子信息工程学院,山西太原030024
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.直流调速系统的滑模变结构控制 [J], 刘龙江;杨维
2.基于滑模变结构控制的对转无刷直流电机调速系统 [J], 李林杰;焦振宏;时建欣
3.无刷直流电机调速系统神经网络自适应滑模变结构控制 [J], 李军红;李兰君;阳武娇
4.实现滑模变结构控制直流调速系统微机系统 [J], 李开生
5.PWM直流调速系统的滑模变结构控制 [J], 陈息坤
因版权原因,仅展示原文概要,查看原文内容请购买。
滑模变结构控制在直流直线电机中的应用研究
Vo . 16 Nn 1
J n. 2 1 a 00
滑 模 变 结 构 控 制 在 直 流 直 线 电 机 中 的 应 用 研 究
李丽 霞 , 宛 波, 田卫 华
( 阳工 程 学院 自动控 制 工程 系 , 阳 10 3 ) 沈 沈 1 16
摘 要: 针对直流直线 电机定位 问题 , 导 了直流直线电机的数 学模 型 , 推 建立 了直流直 线 电机 定位控制 系统 , 并将 滑模
第 6卷第 1 期
2 0年 1月 1 0
沈 阳工程 学院学报 (自然科 学版 ) Ju a o h n a gIstt o n ier g Na f S i c ) o r l fS e y n tue f gn ei ( mr ce e n ni E n l n
U() e S R LS () + 。
:
一
统跟踪 精度 提高 了一个 数量 级 .
1
() 5 () 6
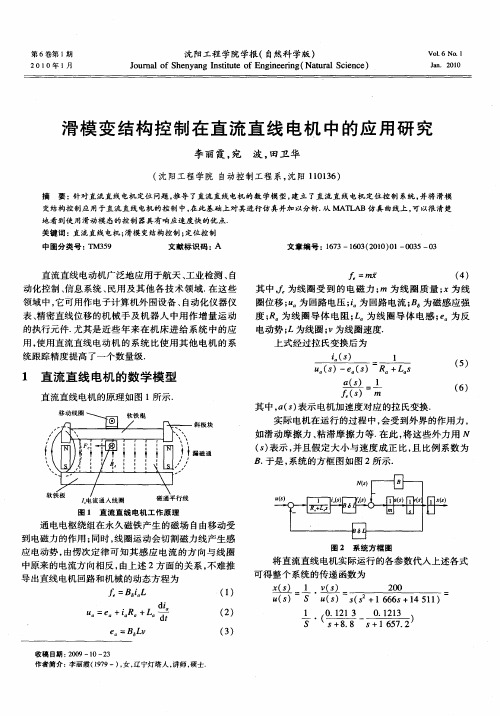
1 直 流 直 线 电机 的 数 学模 型
直 流直线 电机 的原 理如 图 1所示 .
斜极 块
1 ( , ) , l
=
其 中 ,( 表示 电机 加 速度对 应 的拉 氏变换 . 口 ) 实际 电机 在运 行 的过程 中 , 受 到外 界的作 用力 , 会 如滑 动摩 擦 力 、 滞 摩 擦 力等 . 此 , 这 些 外力 用 Ⅳ 粘 在 将
变 结构 控 制 应 用 于 直流 直 线 电机 的控 制 中, 此 基 础 上 对 其 进 行 仿 真并 加 以 分析 . MA L B 仿 真 曲 线 上 , 以很 清 楚 在 从 TA 可 地 看 到 使 用 滑动 模 态 的控 制 器具 有 响 应速 度 快 的优 点 . 关键 词 :直 流 直 线 电机 ; 滑模 变 结构 控 制 ; 位 控 制 定
电机驱动系统中的滑模控制策略优化研究

电机驱动系统中的滑模控制策略优化研究1. 滑模控制策略概述滑模控制是一种常用的非线性控制策略,适用于电机驱动系统等多种控制领域。
它通过引入一个滑模面来实现对系统状态的快速响应和鲁棒性控制。
滑模控制具有简单、快速、鲁棒性好等优点,但也存在着滑模面选择、控制参数选择以及系统参数变化等问题,需要进行优化研究。
2. 滑模控制策略优化方法2.1 滑模面选择优化滑模控制的关键在于选择一个合适的滑模面,以实现系统状态的快速追踪和抑制不确定性等目标。
传统的滑模面选择方法主要基于经验或试错法,无法保证最佳性能。
因此,研究者们提出了基于最优控制理论、自适应方法等进行滑模面选择的优化方法,以提高系统的性能和鲁棒性。
2.2 控制参数优化滑模控制策略中的控制参数选择对系统的稳定性和性能具有重要影响。
传统方法通常通过试验和经验进行选择。
现代优化算法如粒子群算法、遗传算法等被广泛应用于滑模控制策略中的控制参数优化,以提高控制性能并满足系统的要求。
2.3 系统参数变化补偿在实际应用中,电机驱动系统的参数可能会受到负载变化、温度变化等因素的影响而发生变化。
这种参数变化会对滑模控制策略的性能产生不利影响。
因此,研究者们提出了基于模型识别和自适应控制等方法来补偿系统参数的变化,以保证滑模控制策略的性能稳定性。
3. 优化研究案例分析以电机驱动系统为例,我们可以详细研究滑模控制策略的优化问题。
通过建立系统数学模型,根据滑模控制的原理和特点,可以设计相应的滑模面选择方法和控制参数优化方法,以实现对电机驱动系统的精确控制。
4. 结论滑模控制策略作为电机驱动系统中一种重要的非线性控制方法,具有简单、快速、鲁棒性等特点。
然而,滑模控制策略的性能还受到滑模面选择、控制参数选择以及系统参数变化等问题的影响。
因此,在实际应用中对滑模控制策略进行优化研究是非常重要的。
通过滑模面选择优化、控制参数优化以及系统参数变化补偿等方法,可以提高滑模控制策略的性能和鲁棒性,并实现对电机驱动系统的有效控制。
滑模变结构控制及应用
滑模变结构控制及应用滑模变结构控制(Sliding Mode Control,SMC)是一种具有强鲁棒性和抗扰动能力的非线性控制方法。
它是20世纪80年代发展起来的一种控制方法,它通过在滑模面上引入一个不连续函数来实现对系统状态的高频率的转换控制,从而将控制系统的性能提高到一个新的水平。
滑模变结构控制在自动控制领域中得到了广泛的研究与应用,下面我将就其基本原理、设计方法以及应用领域进行详细介绍。
滑模变结构控制的基本原理:滑模变结构控制的基本原理是引入一个滑模面,通过使系统状态在滑模面上进行快速的滑动,从而达到控制系统的稳定性和鲁棒性。
在滑模面上,系统状态由于受到控制输入和系统的非线性特性的影响而发生快速切换,从而使系统状态的滑动速度不断变化,最终达到滑动面的稳定状态。
滑模控制器利用滑模面上的控制输入来驱动系统状态沿着滑模面滑动,以实现状态的稳定和跟踪。
滑模变结构控制的设计方法:滑模变结构控制一般包括滑模面的设计和滑模控制器的设计两个步骤。
滑模面的设计要求其具有可实现性、稳定性和鲁棒性等特性,常用的滑模面设计方法包括等效控制、非线性控制、线性控制等。
滑模控制器的设计包括产生控制输入和产生滑模面两个部分,常用的滑模控制器设计方法包括理想滑模控制器、改进滑模控制器、自适应滑模控制器等。
滑模变结构控制的应用领域:滑模变结构控制在各个领域中都有广泛的应用,下面我将就几个典型的应用领域进行介绍。
1. 机械控制系统:滑模变结构控制在机械控制系统中应用广泛,例如机械臂控制、机械手控制等。
滑模变结构控制可以提供强鲁棒性和抗扰动能力,可以保证机械系统在复杂环境下的精确运动和稳定控制。
2. 电力系统:滑模变结构控制在电力系统中的应用主要包括电力系统稳定控制、电力系统调度控制等。
滑模变结构控制可以有效地处理电力系统中的不确定性和扰动,提高电力系统的稳态和动态性能。
3. 交通运输系统:滑模变结构控制在交通运输系统中的应用包括车辆控制、交通信号控制等。
无刷直流电机滑模变结构电流控制
Miir o d ct n& J n s rv c ,J ns n esy h ni g2 2 1 ,C ia ns f u a o t y E i i guPoi e i guU i rt ,Z ej n 10 3 hn ) a n a v i a
n n c mm u ain p a e c re tc nsa tb s d o W M - o -o tto h s u r n o t n a e n P ON o e T mp c n t e s se ma e by m d . he i a to h y tm d
微 电 机
无 刷 直 流 电机 滑 模 变 结 构 电流 控 制
贾洪平 ,魏海峰
( .江苏大学 电气信息工程学院 ,镇江 1 22 1 ;2 103 .江苏大学 现代农业装 备与技 22 1 ) 103 术省部共建 教育部重点实验室/ 江苏省重点实验 室 ,镇江
摘
要:为提高无刷直流电机控制的鲁棒性及抑制换相转矩波动,在 P WM— N调制基础上,以保证 O
tr u p l t e si i g mo e v ra l tucu e c re tc n r ls h me wa r p s d. T e t r u p— o q e r p e, h ld n d a be sr t r u r n o to c e sp o o e i i h o q e r i p e c u e y c mmu ain wa r a e s s se d su b n e. T e p o o e c e i d t e p t i a s d b o tto s te td a y tm it r a c h r p s d s h me ame o k e he
无刷直流电动机的滑模变结构控制算法研究
Re e r h o r a l r c ur ld n o n r lS s e s a c n Va i b e St u t e S i i g M de Co t o y t m o u h e sDie tCur e o or fBr s l s r c r ntM t
式 中 : b 为 已知 定 常 参 数 。 q…
变 结构 控 制具 有 以下 不连 续 形式 :
点: ①功率密度高; ②只需每 6 。 0反馈一次转子位置, 自然 的 6o 区 时间使逆变 器性 能非 常可靠 : 反 馈 0死 ③ 装置 简单 ,位 置传 感 系统只 需给 出 3个 数字 信号 即 可控 制逆变 器开 关器件 的转 换 ; 控制 结构 简 单 , ④ .只 需控 制梯 形 电流 一个变 量 即可直 接控制 其转 矩 。滑
模 变 结构控制 ห้องสมุดไป่ตู้ 常规控 制 的根 本 区别在 于控 制 的不
)
s 一0 ( ) ( 0 j 一
吕
( 2 )
() 3
控制 规 律 的选 择要 满 足下 式 给 出的 到达 条件 :
l : ( < ,l = ( > i s ) 0 i 5 ) 0 m m
切 换 函数 为 : ()c + 2…+ I栅 () S = Ic + c 卜 I 4
YAN n — n.I Yi g mi JU e . u W ig o
( o h et o 'cncU ie i X ’2 10 2 C ia) N r w sP bt h i nvrt, iO 0 7 , hn t e s) 37
DC-DC变换器的滑模变结构控制及动态品质研究.ppt
建立核心,完善制度,形成有效的管理机制。班委成员是民主选举产生的,班委 们始终秉承“以人为本,以班为纲”的治班理念,坚持以它作为班级管理的指导思想, 督促班级成员“做好自己,共创美好未来”。全体班干部均能以全责为己任,紧密协 作,不仅按时按质按量地完成了学校、学院安排的各项任务,而且能够创造性的开展 富有特色的活动。班委会工作最大的特点就是有计划、有制度、有总结,根据我班的 具体情况,本着“从实际出发,一切为班级和全体同学服务”的宗旨,制定并逐步完 善管理制度,使同学们对班委会满意,使学院和老师对我们放心。全体班委成员心往 一处想、劲往一处使,尽最大努力为班集体服务、为普通同学服务,在增强班级凝聚 力的同时,努力使全班同学向党、团组织靠拢,使同学们在提高能力的同时思想素质 也得到更进一步的提高。 三、学习方面:
尊敬的各位领导、老师,亲爱的同学们: 大家下午好! 正值全校师生还沉浸在我校本科教育七十周年的喜庆当中,我校一年一度的学生
无刷直流电机的指数趋近律滑模变结构控制
( L C , t t yo sdn oecn o wt ep nn a rahn w, n nls fhs ot l t t yf — B D M) asa g i gm d ot l i xoet leci l ada a io icnr r e a re fli r h i ga ys t o sa g e
计 了一种指数趋近律的滑模 变结 构控制策略 , 并对该控制策略 的可行性进 行理论分析 。通过设计 B D M控 LC 制系统 的速度环节 , 使控制性能得到很大改善。仿 真试验 表明 , 该控制 策略具有响应速度 快 、 无超调 、 负载 抗
扰 动 能 力 强 等 优 点 , 高 了 B D M 的鲁 棒 性 , 而 验证 了指 数 趋 近 律 的滑 模 变 结 构 控制 策 略 的有 效 性 。 提 LC 从
c n rlsrt g sv r fe tv l. o to tae y wa e y efc iey
Ke o d : r s l s C moo ( L M ) s dn d o t l e p n nil e c i glw y w r s b u he t r B DC sD ; l igmo ec n r ; x o e t a hn i o ar a
关 键 词 :无刷 直 流 电机 ;滑模 变 结 构 控 制 ; 数 趋 近 律 指
中 图分 类 号 : M 3 12 T 3 文 献 标 志码 : 文 章 编 号 :636 4 (0 1 0 4 3 -4 T 0 . : M 3 A 17 -50 2 1 )3 ) 20 0
S i i g M o e Co t o fBr s l s l n d d n r lo u h e s DC o o t p n n i lRe c i g La M t r wih Ex o e ta a h n w
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
= T1
+ J dω dt
(3)
Tem = kt αi
(4)
其中 , Tem —电磁转矩 ; J —电机 转 动 惯 量 ; ω—转 动 角 速 度 ;
T1 —负载转矩 ; kt —电磁转矩常数 。
对式 ( 1) - ( 4)进行拉氏变换 , 若忽略电枢电感的影响 ,
则电机模型可简化为一阶惯性环节 。所构成的控制系统的
达滑模面过程的动态品质与高频抖振之间的矛盾 。通过大
量仿真研究 ,并结合幂次趋近率 s = - ε| s |α sgn ( s)ε > 0, 1 >
α > 0。可设计如下的改进趋近律 :
s = - εs2 s sgn ( s) - ks
ε > 0, k > 0
(6)
式中 : s2 s 项起到平滑的作用 , - ks项保证快速趋近 。
不难验证按照 ( 6)式选择的趋近率满足滑模变结构控制
的到达条件 ss < 0。
由于 ss = s ( - εs2 s sgn ( s) - ks)
= - εs3 s s - ks2 s
= - εs4 - ks2 其中因 ε > 0, k > 0,所以 ss < 0,满足到达条件 , 所以系统 满足滑模存在的条件 。
电机的调速控制系统的特点是控制对象具有非线性 、时 变性和不确定性特征 ,难以建立电机精确的数学模型 ,而控 制指标又要求系统抗干扰能力强及高可靠性 。所以滑模变
收稿日期 : 2008 - 06 - 30 修回日期 : 2008 - 07 - 25
结构控制很适合于电机的调速控制 。然而滑模变结构控制 也存在抖动这个固有缺点 ,如何有效削弱抖动就成为滑模变 结构研究的重要任务 。文献 [ 5 ]中对于电机控制的设计多采 用“边界层 ”法 ,这种方法虽然可以削弱系统的抖振 ,但它也 破坏了系统的结构 ,丢失了滑模变结构控制的鲁棒性优点 , 而且“边界层 ”法仅能保证系统状态收敛到以滑动面为中心 的边界层内 ,只能通过设置较窄的边界层来控制系统状态任 意地接近滑模 ,但不能使状态收敛到滑模 ,边界层的选取不 当还会导致系统的不稳定 。文献 [ 6 ]中引入积分分离 P ID 滑 模控制策略 ,可以保证稳定性和快速趋近 ,并能有效削弱抖 振的影响 ,但是系统只对小频率的扰动具有良好的效果 。本 文采用优化趋近率的滑模控制策略对电机进行控制 ,使系统 具有响应快速 、对参数变化及扰动不灵敏 、物理实现简单等 优点 ,并能有效削弱其固有的抖振现象 。
— 342 —
e = r - x1 e = r - x2 设滑模面为 s = e + ce,采用指数趋进律 ,令 s = - εsgn ( s) - ks ε > 0, k > 0。由于系统的轨迹在到达切换面时 ,其速度 有限大 ,机电惯性使运动点穿越切换面 , 从而最终形成抖振 , 叠加在理想的滑动模态上 。由于相对于实际的计算机采样 系统而言 ,计算机的高速逻辑转换以及高精度的数值运算使 得切换开关本身的时间及空间滞后影响相对忽略不记 , 因 此 ,开关的切换动作所造成的控制的不连续性是抖振发生的 根本原因 。这种抖动会激发系统中的高频未建模动态 , 进而 破坏系统的性能 。滑模变结构控制本质上无法完全消除抖
式中 ,又因 ε > 0, k > 0, 故 d V ( t) < 0, 所以整个控制系统是 dt
李亚普诺夫意义下渐进稳定的 。
综合以上各式 ,改进后的直流电机滑模变结构控制律可
导出为 :
u
=
JRα Kp Kt
[
¨r +
ce
+
Kv Kt JRα
x2
+ T1 J
+ ks +εs2
s sgn ( s) ]
近律 。利用趋近律可以削弱抖振 , 而且这种方法直观 、简单 ,
不需要任何附加装置和措施 ,只要适当地选择趋近律中的参
数即可 。但这些趋近律方法又各有缺点 , 如 :上述基于指数 趋近律 s = - εsgn ( s) - ks的控制策略 ,由于存在等速项 εsgn
( s) ,所以通过调整趋近律的参数 k 和 ε会导致滑动模态到
框图如图 1。
图 1 系统方框图
记 TL 为摩擦力矩 , x1、x2 分别为角度输出位置和角度转 速信号 。采用滑模控制器来控制力矩电机 , 并采用位置和速 度双反馈 。设 U ( t)为滑模控制器输出 , 取 x1 =θ , x2 =θ·, 得 到系统的状态方程如下 :
x1 = x2
x2
=-
Kv Kt JRa
1 引言
滑模变结构控制本质上是一类特殊的非线性控制 ,其非 线性表现为控制的不连续性 ,这种控制策略与其它控制策略 的不同之处在于系统的“结构 ”并不固定 ,而是在动态过程中 根据系统当前的状态 (如偏差及其各阶导数等 )有目的地不 断变化 ,迫使系统按照预定“滑动模态 ”的状态轨迹运动 [1 ] 。 研究表明 [2 - 4 ] :滑模变结构控制具有快速响应 、对参数变化 及扰动不灵敏 、无需系统在线辩识 ,物理实现简单等优点 。 因此 ,滑模变结构控制近年来得到了广泛的应用 。
O ptim ized D esign of Slid ing M ode Var iable Structure Con trol for DC m otor
GAO Hang, J IAN G Dong - fang, J IAN G J ing
(College of Automation, Northwestern Polytechnical University, Xiπan Shanxi 710072, China)
— 341 —
2 系统描述
不失一般性 ,设电机电动势的动态平衡方程为 :
uα = eα + αi Rα
(1)
eα = kvω
(2)
其中 , uα —电源电压 ; αi —电枢电流 ; Rα —电枢电阻 ; eα —电枢
反电动势 ; kv —电动势常数 ;ω—转子转动角速度 。
力矩平衡方程 :
Tem
同样 ,若取李亚普诺夫函数 :
V ( t)
=
1 2
[ ( s1 ) 2
+ ( s2 ) 2 ]
>0
则 d V ( t) dt
= s1
ds1 dt
+ s2
ds2 dt
= s1 [ - εs21 s1 sgn ( s) - ks1 ] + s2 [ - εs22 s2 sgn
( s) - ks2 ] = - k ( s21 + s22 ) - ε( s41 + s42 )
的位置 、速度跟踪的要求 ,但控制器的输出伴随着抖振 , 影响 控制精度 ,甚至有可能对设备造成损坏 。
从图 2—图 4看出 ,采用滑模变结构控制能达到高精度
这里引入改进趋近律的方法来削弱抖振 。采用改进的 指数趋近律后 , (图中取仿真参数为 : s = - 8s2 | s | sgn ( s) - 5. 0s) 。仿真结果如图 5—图 7所示 。仿真结果表明 ,利用优化 后的滑模控制方法使系统在保证位置 、速度控制精度的同时 削弱了抖振 ,控制效果良好 。
(7)
4 仿真结果
在实际仿真时所选用的电动机的参数为 : Ra = 5. 5Ω, J = 0. 5kgm2 , Kv = 1. 5 V / ( rad / s) , Kt = 5Nm /A, Kp = 10;摩擦模 型采用 Stribeck模型 。通过 Simuink模块编程滑模变结构控 制算法 。在选取输入信号为 r ( t) = 0. 1 sin ( 2π ×t) 情况下 , 改变系统的参数环境 , 首先采用滑模变结构控制 , 仿真结果 如图 2—图 7所示 。
ABSTRACT: In order to imp rove the dynam ic response of DC motor speed regulation and reduce the chattering caused by exponential reaching law, this paper p resents a new control method of DC motor. The algorithm of Variable Structure Control (VSC) is app lied for controlling the speed of DC motors. Based on DC motorπs mathematic model, two variable structure controllers are described. An op tim ization exponential app roach law of variable structure control is p roposed. The simulation results illustrate that the op tim ized exponential app roach law of sliding mode variable structure controller is more suitable for position / speed control of a DC motor. The advantages and disadvantages of each method are studied. Op tim ized controller holds better effect. This new method is p resented to reduce chattering introduced from SMCπs discontinuous controller effectively. The method has a certain p ractical value. KEYWO RD S: Position / speed control; Sliding mode control; DC motor; Exponential app roach law; Chattering