小角法水平位移观测精度分析
小角法在渡槽变形监测中的应用

有强 制对 中装 置 的对 中盘 。监 测点 偏 离 工 作 基 线 的 角度 不 超 过 30 ,以尽 可 能 地 发 挥 小 角 法 观 测 的 优 势_6]。渡槽跨度较大,在渡槽跨与跨 的连接处分别布 设 2个 监 测点 ,每 2个监 测 点 间距 离 基本相 等 [7]。共
1 小角法基本原理
通过 建筑 物轴 线 (例如 大 坝 、桥 梁轴 线 )或平 行 于 建筑 物轴 线 固定不 动 的铅 直平 面为 基 准面 ,根据 它来 测定建 筑 物水 平 位 移 的 方 法称 为 视 准 线 法 。小 角法 是视 准线 法 的一种 常 用方 法 ,利用精 密 经纬仪 精 确地 测 出基准 线方 向与测 站 点 到 观 测 点 的 视线 方 向之 间 所夹 的小 角 ,从 而 计 算 观 测 点 相 对 于 基 准 线 的偏 离 值 [引,如 图 1所 示 。
2个 观 测 蹙
图 1 小 角 法 测 偏 离 值
由图 l可 见 ,AB 为基准 线 ,i为 观测 点 , 为 点在 AB 上 的投 影 ,△ 为偏 离值 ,利 用 精 密 经 纬 测 量 小 角
a ,并 测量 A 到 的距 离 S ,可计 算 出偏离值 为
A 一 盟 S
(1)
l0
2.1 平 面控 制 网布设 在渡 槽轴 线延 长线 的基 岩上 ,分 别埋设 2个基 准
点 B 、B ,在 渡槽 左侧 2个 山包 的基 岩 上 分 别埋 设 2 个基 准点 Bz、B。,点 与点 之 间 两两 通 视 。B 、Bz、B。、 B 构成平 面控制 网,采 用 GPS观测 ,等 级为二 等。 根据 工程 实 际情况 ,直 接利 用 B 、B 作 为 工 作 基点 , 进行 水平 位移 观测 。
小角法在水平位移监测中的应用分析
2 1 第 2期 0 0年
上 海地 质
S a g a o o y h n h iGe lg ・51 ・
例一 : S=30 S =1 0 则 对 观测 点 P 测 角 0 m, i 5 m, ;
当 卢 10时 , p一s s8 5 S口 J + 8 S i A p p A" A S A
.P sB
.
误 差影 响为 : ±15 由下 文 的 ( 3 式 可推 算 此 i = n ., 1) 误 差对 P 点 的偏 移量 影 响为 ±1 1 i . mm, 此误 差 对 于
点 。由于 A点 发生 位 移 e将 导致 观 测 点 测 角偏 差
目前广 泛进 行 的建 筑 变 形 监 测 ( 基 坑监 测 ) 如 中, 小角法得 以普遍应 用 , 一些监 测人员往 往 只看 到 此方 法“ 观测原理 简单 , 投资 少 , 实施 简便 ” 的特点 ,
△, e 由于 B点 发 生 位 移 e将 导 致 观 测 点 测 角 偏 差
需测 定 的位移 通常很 细 微 , 因此 对 位移 的 观测 精度
要求很 高 , 需要 采取各种 提高观测 精度 的措 施 , 观测 过程 中需要对各 作业 环 节严 格 把握 , 怕仅 仅 是一 哪 个小环节 的失误 , 可能 导致 最 终监 测精 度 不 能满 都
足要求 。
差 。如 图 2 以 A为 基 准 点 测 站 , B为 定 向基 准 , 则
Ad =一P Oi Z
・
法属 于 此类 ) 三角 测 量 法 等 。基 准 点 的检 测 精 度 、
应不 低 于监测 点必要 精度 的 / _ 。 22 J 基准 点 的位移判 定 可采 用 “ 比较 法 ” 以两期 点 , 位平 差值 相 比较 , 差 值 A 其 d符 合 下 式 即认 为 点 位
基坑水平位移与沉降监测方案
基坑水平位移与沉降监测方案1.概况1.1 工程概况这个项目是一项大型的建筑工程,旨在建造一座现代化的大楼。
该建筑将包括商业和住宅用途,是当地城市发展的一个重要组成部分。
1.2 基坑概况该项目需要进行基坑开挖,以便为建筑物的地基做好准备工作。
基坑的深度将达到20米左右,需要进行支护工作以确保工人的安全。
1.3 工程地质概况该项目的地质条件复杂,地下水位较高,土质较软,需要采取特殊的施工方法来确保基坑的稳定性和安全性。
此外,还需要进行地质勘探和监测工作,以确保施工过程中不会对周围环境造成不良影响。
1.4 环境概况该项目位于城市中心,周围有许多居民和商业企业,需要采取特殊的措施来减少施工对周围环境的影响。
此外,还需要进行噪音、粉尘和污水处理等工作,以确保施工过程中不会对周围环境造成不良影响。
2.基坑支护及施工方案为确保基坑的稳定性和安全性,我们采取了多种支护措施,包括钢支撑、混凝土墙和土钉墙等。
此外,我们还采用了先进的施工技术,如挖孔桩、土钉墙和钻孔灌注桩等,以确保基坑的稳定性和安全性。
我们还将采取噪音、粉尘和污水处理等措施,以确保施工过程中不会对周围环境造成不良影响。
3、监测目的、范围、依据、原则及监测内容3.1 监测目的:本次监测的目的是为了解决公司在生产过程中存在的环境污染问题,以及对环境影响的评估。
3.2 监测范围:本次监测的范围包括公司生产厂区及周边区域,主要监测点包括废水排放口、废气排放口、噪声等。
3.3 监测依据:本次监测的依据主要包括国家环境保护法规、公司环境保护标准以及国家环境监测标准等。
3.4 编制原则:本次监测的编制原则主要包括科学性、规范性、客观性、可比性等原则。
同时,为了保证监测结果的准确性,我们将采用多种监测方法,包括现场监测、实验室分析等。
以上是本次监测的目的、范围、依据、原则及监测内容的简要介绍。
我们将严格按照以上要求进行监测,确保监测结果的准确性和可靠性。
3.5 监测内容64、基坑监测项目和监测方法要求汇总表75、监测方法5.1 水平位移观测:水平位移观测是指对基坑周边建筑物、道路等进行水平位移监测。
浅析视准线法的两种观测方法
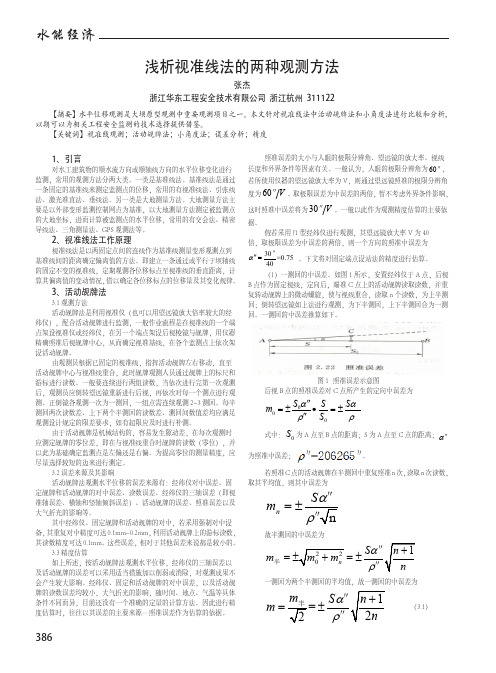
(1)一测回的中误差。如图 1 所示,安置经纬仪于 A 点,后视 B 点作为固定视线,定向后,瞄准 C 点上的活动觇牌读取读数,并重 复转动觇牌上的微动螺旋,使与视线重合,读取 n 个读数,为上半测 回;倒转望远镜如上法进行观测,为下半测回,上下半测回合为一测 回。一测回的中误差推算如下。
图 1 照准误差示意图 后视 B 点的照准误差对 C 点所产生的定向中误差为
S α″ S Sα m0 = ± 0 • = ± ρ″ S0 ρ
式中: S0 为 A 点至 B 点的距离;S 为 A 点至 C 点的距离测回中重复照准 n 次, 读取 n 次读数, 取其平均值,则其中误差为
mn = ±
Sα″ ρ″ n
故半测回的中误差为
3、活动觇牌法
3.1 观测方法 活动觇牌法是利用视准仪(也可以用望远镜放大倍率较大的经 纬仪),配合活动觇牌进行监测,一般作业流程是在视准线的一个端 点架设视准仪或经纬仪,在另一个端点架设后视棱镜与觇牌,用仪器 精确照准后视觇牌中心,从而确定视准基线,在各个监测点上依次架 设活动觇牌。 由观测员根据已固定的视准线,指挥活动觇牌左右移动,直至 活动觇牌中心与视准线重合,此时觇牌观测人员通过觇牌上的标尺和 游标进行读数。一般要连续进行两组读数,当依次进行完第一次观测 后,观测员应倒转望远镜重新进行后视,再依次对每一个测点进行观 测。正倒镜各观测一次为一测回,一组点需连续观测 2~3 测回。每半 测回两次读数差、上下两个半测回的读数差、测回间数值差均应满足 观测设计规定的限差要求,如有超限应及时进行补测。 由于活动觇牌是机械结构的,容易发生隙动差,在每次观测时 应测定觇牌的零位差,即在与视准线重合时觇牌的读数(零位),并 以此为基础确定监测点是左偏还是右偏。为提高零位的测量精度,应 尽量选择较短的边来进行测定。 3.2 误差来源及其影响 活动觇牌法观测水平位移的误差来源有:经纬仪对中误差、固 定觇牌和活动觇牌的对中误差、读数误差、经纬仪的三轴误差(即视 准轴误差、横轴和竖轴倾斜误差)、活动觇牌的误差、照准误差以及 大气折光的影响等。 其中经纬仪、固定觇牌和活动觇牌的对中,若采用强制对中设 备, 其重复对中精度可达 0.1mm~0.2mm, 利用活动觇牌上的游标读数, 其读数精度可达 0.1mm。这些误差,相对于其他误差来说都是较小的。 3.3 精度估算 如上所述,按活动觇牌法观测水平位移,经纬仪的三轴误差以 及活动觇牌的误差可以采用适当措施加以削弱或消除,对观测成果不 会产生较大影响。经纬仪、固定和活动觇牌的对中误差,以及活动觇 牌的读数误差均较小,大气折光的影响,随时间、地点、气温等具体 条件不同而异,目前还没有一个准确的定量的计算方法。因此进行精 度估算时,往往以其误差的主要来源—照准误差作为估算的依据。
小角法观测
1 引言小角法是水平位移监测中常用的方法,通过测定基准线方向与观测点的视线方向之间的微小角度从而计算观测点相对于基准线的偏离值,根据偏离值在各观测周期中的变化确定位移量。
由于所需测定的位移通常很细微,因此对位移的观测精度要求很高,需要采取各种提高观测精度的措施,观测过程中需要对各作业环节严格把握,哪怕仅仅是一个小环节的失误,都可能导致最终监测精度不能满足要求。
2关于基准线的设置2. 1基准线的方向设计如图1为小角法监测示意图,A、B为基准点。
从图中可以看出,小角法测定的水平位移(偏离值d的变化量)具有单一方向性,并且此方向一定是基准线的垂直方向。
由此可见,设计基准线的方向必须垂直于可预见的水平位移方向,否则,所测定的位移量将失真。
通常基准线按临近而平行于待测建筑边线布置,而观测点则应布设在基准线方向上,各测点偏离基准线的角度不应超过30"[1]。
上述规定目的在于有效发挥小角度法测量的优势:即在观测时不转动仪器照准部,而只用全站仪(经纬仪)的微动机构照准读数。
实践证明,这样可以有效提高测角精度。
2. 2基准线的固定基准设计小角法需要稳定不变的基准线作为测量平面位移的基准,基准点发生位移将直接导致监测数据偏差。
如图2,以A为基准点测站,则B为定向基准点。
由于A点发生位移e将导致观测点测角偏差Δe,由于B点发生位移e′将导致观测点测角偏差Δe′。
考虑最不利的影响,则:2. 3基准点的稳定性检验理想的基准线稳定性的检验图形是在基准线两端的延长线上设立校核基准点,限于现场条件,可采用各种行之有效的方法,如后方交会法(反演小角法属于此类)、三角测量法等。
基准点的检测精度2. 4基准线的可变基准设计下面以“方向线偏移法”[3]为例进行分析。
如图3,在施工影响之外的坚固建筑物上选设两个固定标志A、B,将被监测点之一的Pi点直接作为测站点,初次观测时,测出该点对应A、B 及其他监测点的边长与角度,以后每次观测时先测量∠APiB角的变化量,求得Pi点的横向位移量,再以Pi点测量任意监测点Z的∠APiZ角的变化量,以此求得各观测点的位移量。
水平位移监测方案

水平位移监测方案文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-水平位移监测方案一、精度选择按照设计要求,对照《工程测量规范》(GB 50026-2007),选用三等水平位移监测网进行检测,可以满足精度要求。
表1-1 水平位移基准网的主要技术指标表1-2 水平角方向观测法的技术指标(1)观测原理:如下图所示,如需观测某方向上的水平位移PP′,在监测区域一定距离以外选定工作基点A,水平位移监测点的布设应尽量与工作基点在一条直线上。
沿监测点与基准点连线方向在一定远处(100~200m)选定一个控制点B,作为零方向。
在B点安置觇牌,用测回法观测水平角BAP,测定一段时间内观测点与基准点连线与零方向间角度变化值,根据δ=△β*D/ρ(式中D为观测点P至工作基点A的距离,ρ=206265)计算水平位移。
(2)精度分析:由小角法的观测原理可知,距离D和水平角β是两个相互独立的观测值,所以由上式根据误差传播定律可得水平位移的观测误差:水平位移观测中误差的公式,表明:①距离观测误差对水平位移观测误差影响甚微,一般情况下此部分误差可以忽略不计,采用钢尺等一般方法量取即可满足要求;②影响水平位移观测精度的主要因素是水平角观测精度,应尽量使用高精度仪器或适当增加测回数来提高观测度;③经纬仪的选用应根据建筑物的观测精度等级确定,在满足观测精度要求的前提下,可以使用精度较低的仪器,以降低观测成本。
优点:此方法简单易行,便于实地操作,精度较高。
不足:须场地较为开阔,基准点应该离开监测区域一定的距离之外,设在不受施工影响的地方。
由此可知,对仪器测角精度的要求,取决于监测点距离站点的远近。
距离越远,则要求测角精度越高。
根据现场踏勘布点,最远监测点距离站点不超过50m,对照《工程测量规范》,选用三等或四等水平位移监测网进行检测,可以满足精度要求。
本次实习采用测小角法测量三等水平位移监测网进行检测。
基坑变形监测水平位移测量的几种方法
基坑变形监测水平位移测量的几种方法作者:李月彬李彩云来源:《城市建设理论研究》2012年第18期摘要:随着城市经济建设的快速发展,城市用地越来越紧张,使得城市发展不得不向上或向下发展,基坑开挖的深度越来越深。
为了确保基坑支护的安全,不论是一、二、三级基坑,根据《建筑基坑工程监测技术规范》GB50497-2009的要求对基坑坡顶的水平位移都要求进行监测,现就当前基坑监测水平位移监测的几种方法进行探讨。
关键词:水平位移测量;视准线法;小角法;前方交会;后方交会;极坐标Abstract: With the rapid development of the city's economic construction, urban land is more and more tense, which makes the urban development had to go upward or downward, such as the deeper and deeper excavation of foundation pit. In order to ensure the safety of the excavation support system, no matter the primary, secondary, or third pit, according to the requirements of Building Foundation Pit Project Monitoring Technical Regulation GB50497-2009, the horizontal displacement of the pit top are required to be monitored. Hereby, this paper will expounds the several methods for the current horizontal displacement monitoring.Key words: horizontal displacement measurement; collimation line measurement; small-angle measurement; forward intersection; resection; polar coordinates中圖分类号:TV551.4文献标识码:A 文章编号:2095-2104(2012)视准线法视准线法,主要应用在场地比较开阔,基坑比较规整的长方形或正方形基坑。
小角法在水平位移监测中的应用分析
2. 4 基准线的可变基准设计 下面以 方向线偏 移法 [ 3] 为例进行分析。如
图 3, 在施工影响之外的坚固建筑物上选设两个固 定标志 A、B, 将被监测点之一的 Pi 点直接作为测站 点, 初次观测时, 测出该点对应 A、B 及其他监测点
的边长与角度, 以后每次观测时先测量 AP iB 角的 变化量, 求得 P i 点的横向位移量, 再以 Pi 点测量任 意监测点 Z的 A Pi Z角的变化量, 以此求得各观测 点的位移量。
4 关于仪器选择和检校
4. 1 测角仪器的选择 采用小角法进行水平位移监测时应当根据工程
具体情况进行精度设计, 其基本思路如下: 首先应由 ( 15)式对小角法观测的必要精度进行估算 ( 同时要 顾及仪器对中误差等各因素的影响 ), 根 据所需精 度指标确定测角仪器的等级, 然后按仪器等级估算 所需要的测回数, 估算原理为 [ 4] :
3. 2 仪器望远镜调焦误差影响
根据研究, 望远镜改变对光时, 对于视线的影响
可达 1. 2,'因此, 10m 至 200m 的范围内, 视准轴的
变化可取值为 1 ~ 2 , 如果测点到仪器的距离 为 100m, 则此误差 m f = 0. 5~ 1. 0mm。[ 4]
在进行小角法监测网设计时, 尤其是在基准点
m = mv s= 60
s
( 16)
n
vn
其中 n为小角 a的测回数。
应特别指出, 当角度观测不符合小角法观测条
保证, 因此, 对于二级以上的水平位移监测不建议采
用此方法, 特殊情况下确需采用该方法时, 建议 A、
B 两点按基准点布设要求实地埋设, 并应根据观测 点分布情况分别以基准点 A、B 为基准方向按小角
桩顶水平位移及收敛监测方法
桩顶水平位移及收敛监测方法1、桩顶水平位移采用强制对中观测墩,在基坑周边围护结构角部以及中间部位设置,每20~30m设置一个点。
2、钢支撑轴力可以采用轴力计或者应变计进行监测,轴力计监测效果更好,测得的轴力值更加准确,应变计精度要差一一些,但是也是可以反映支撑轴力变化的。
轴力计安装在支撑的固定端头,采用一个钢桶套进行保护,同时也有利于支撑与围护结构之间的受力联系。
应变计安装在最长的斜撑以及支撑的中间部位,上下对称安装。
3、水平位移采用"小角度法”量测。
在离基坑两倍开挖深度外,选设一基点A,若测站至观测点T的距离为S,则在不小于2S的范围之外,选设后方向点A,。
用全站仪测定角,角度测量的测回数可根据距离S及观测点的精度要求定,一般测2~4测回,并测距离S。
4、测斜管的安装在围护结构施工时随钢筋笼一起埋设。
埋设时一定要注意将节与节之间的接头用胶带缠好,底部做好封口,防止在混凝土浇筑过程中流入测斜管内,导致测斜管报废。
另外测斜管采购时注意规格控制,一个测斜孔一定要采用同一批次购置的测斜管,否则,由于不同批次测斜管加工精度的细微差别,极有可能会导致测斜仪探头无法下放,也会造成测斜管报废。
5、基坑周边沉降监测点距离基坑边0.2H、0.5H、1.5H布置,相邻两组测点间距按照设计要求布置,一般为20m。
6、基坑周边建(构)筑物及管线的监测则要根据实际情况,布置在建构筑物受力柱根部,管线的上方及周边。
有些重要管线甚至需要做环箍监测。
7、基坑收敛监测点一般沿着钢支撑轴力监测点布设在同一层钢支撑的两侧围护结构上。
采用打设带钩的膨胀螺栓的方法在现场设置监测点。
采用收敛计进行监测。
为了安全和便利,一般会在钢支撑上绑2根线绳,用来把收敛尺的一头传递到基坑的另一侧。
小角法方案
一、小角度法测量原理
如下图所示,测站点经纬仪照准远处目标点形成视准线,测定观测点偏离视
小角度法观测示意图
准线的小角,在已知测站至观测点距离的条件下,可计算出观测点偏离视准线的偏离量:
L S ⋅''''=ρ
β S — 观测点偏离量;
L — 观测点至测站的距离;
β''— 小角
ρ''— 206265。
三、小角法测量精度估算
根据位移量的计算公式和误差传播定律,可得小角法测量精度估算式如下:
ρ''/βs L m m =
式中:s m — 位移测量中误差(mm );
βm — 测角中误差(″);
L — 视准线长度(mm )
; ρ''— 206265。
由估算式可知,小角法检测精度与视线长及测角误差成正比。
采用DJ2型经纬仪一测回测小角,监测精度估算如下:
取视线长100m ,测角精度为±2″,按上式计算监测精度为
mm s 1206265/1000002m ±≈⨯''±=
注:小角法测量精度估算要根据测点布置方案,确定测站点至观测点的最长距离,估算其最弱点精度,当最弱点精度满足要求时,方案就是可行的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小角法水平位移观测精度分析
摘要:针对当前小角法精度分析不足问题,本文提出了小角法平面位移监测精
度并进行实验验证,通过与坐标法进行精度比较,发现小角法平面位移监测精度
高于坐标法,因此该法是一种快速有效的平面位移监测方法。
关键词:小角法;坐标正算;坐标增量;水平位移监测
0 引言
全站仪小角法是一种简单的位移变化测量方法,在工程项目中有着广泛的应用,例如测站误差与照准误差分析[1]、悬高测量[2]、平面位置变化监测等。
小角
法测量具有操作简单、计算简洁的优点,因而在平面位移变形监测中得到广泛应用,然而据已有文献记载,目前对小角法监测精度分析认识并不充分,尤其是对
小角法的适用条件与的精度指标研究,缺少理论分析与实验检验。
本文在理论上
分析了小角法测点精度,并运用南方NTS-382R6全站仪,在变形监测中进行小角
测点精度实验,结果证明小角水平位移监测法精度高于坐标法精度,是一种简洁
快速的水平位移监测方法。
1全站仪小角法测量原理
小角测量法实质是一种近似计算平面位移的方法,通过观测角度增量,利用
测站到监测点的距离,近似计算水平位移变化量。
在图1中,O为测站,N为后
视点,A、B、C为监测点,由于变形体位移和误差的存在,后期观测方向A1、B1、C1与前期观测方向A、B、C存在微小角度差α、β、κ,由于α、β、κ足够小,后期相对位移增量AA1、BB1、CC1可视为分别在以O为圆心,以α、β、κ为圆心
角的小圆弧,因此弦(位移量)AA1、BB1、CC1可以用弧AA1⌒、BB1⌒、
CC1⌒代替,并且近似认为OA≈OA1、OB≈OB1、OC≈OC1,最终按(1)式计算
AA1、BB1、CC1。
图1 小角法原理
(1)
2小角法理论精度
因此(3)式小于(4)式,即便不考虑已知点误差,小角法精度仍比坐标法
精度高。
由此可见,利用全站仪测定监测点位移,其计算误差包含控制点点位误
差和全站仪测角、测距误差,而小角法计算位移不包含控制点误差,其精度明显
优于坐标法。
3实验与分析
3.1实验项目
监测工程为某发电厂水平位移变形监测项目,本实验对加氯间、循环水泵房
进行了水平位移监测,共有5个工作基点和30个监测点,工作基点以DG加序号
命名,监测点以GL或D加序号命名。
工作基点DG1、DG2、DG3、DG4、DG5以
E级网标准施测了8次,旨在求取点位误差。
水平位移监测采用全站仪坐标法与小角法,对变形监测点GL03、GL04和
D19-D26的平面位置进行了5期观测。
观测仪器采用的是南方NTS-382R6型全站仪,测角精度为2",每次施测前后均进行了仪器检校,确保观测成果准确无误。
3.2精度分析
3.2.1数据获取
根据全站仪小角测量,自2015年2月-2015年10月对监测点进行了5期观
测,第二、三、四、五期观测距离S和小角α相对前期的变化如表1所示,其中测站、后视方向均与第一期相同,小角是通过对相邻两期后视方向夹角作差获取的。
表1 第二至五期观测距离与小角值
3.2.2精度比较
小角法平面位移监测精度分析时运用(3)式,顾及与传统坐标法进行比对,将(3)式计算的误差与(4)式计算的误差进行比较,得出二者平面位移监测精度的优劣。
为了求取(4)式中已知点平面精度、,根据工作基点的8次观测成果,采用改正数计算方法计算出 =4mm, =3mm,边长误差由表1所示的平均观测距离与全站仪测距精度(2mm+2ppm)确定,其精度如表2第三列所示,由于测角精度为2″,因此=2″。
利用表1中的α,利用(3)式计算第二期相对于第一期小角法水平位移监测精度,其中误差如表2第四列所示,运用(4)式计算坐标法第二期相对于第一期平面位移监测精度,中误差如表2第五列所示。
表2 小角法与坐标法精度对比
由表2分析可知,影响小角法精度主要因素是边长,而影响坐标法精度的主要因素是已知点精度,边长次之。
分析表2可知,小角法平面位移监测精度优于坐标法。
4 结论
本文从理论上分析了小角法位移监测精度,结果发现小角法水平位移监测精度高于传统坐标法,实验上也验证了理论的正确性,因此小角法不失为一种平面位移监测快速有效方法。
同时,全站仪小角法对仪器要求门槛低,监测中可用同精度经纬仪代替全站仪。
参考文献
[1]李井永.建筑工程测量[M].武汉:武汉理工大学出版社,2012:59-60.
[2]丁林磊,庞文,万冠军.小角法精确悬高测量方法研究[J].测绘地理信
息,2013,38(6):42-44.
[3]李巍,赵亮,张占伟等.常用全站仪放样方法及精度分析[J].测绘通
报,2012,(5):29-32.。