电动车控制器维修

一、电子元器件常识
1、电阻
贴片电阻一般分为2种:
(1)3位数,普通型,误差5%,前2位为有效数值,第三位为0的个数,如:“103”为10000欧姆,即10K,“152”为1500欧姆,即1.5K。
(2)4位数,精密型,误差1%,前3位都为有效数值,第四位为0的个数,如“1502“为15000欧姆,“1511”为1510欧姆。
测试方法:将万用表档位切换到对应量程的欧姆档,将测试表笔连接到待测电阻上。
注意:
(1)如果被测电阻值超出所选择量程的最大值,将显示过量程“1”,应选择更高的量程,对于大于1MΩ或更高的电阻,要几秒钟后读数才能稳定,这是正常的。将测试出的阻值与贴片电阻上标的值对比,即可判断电阻是否值变。
(2)当没有连接好时,例如开路情况,仪表显示为“1”。
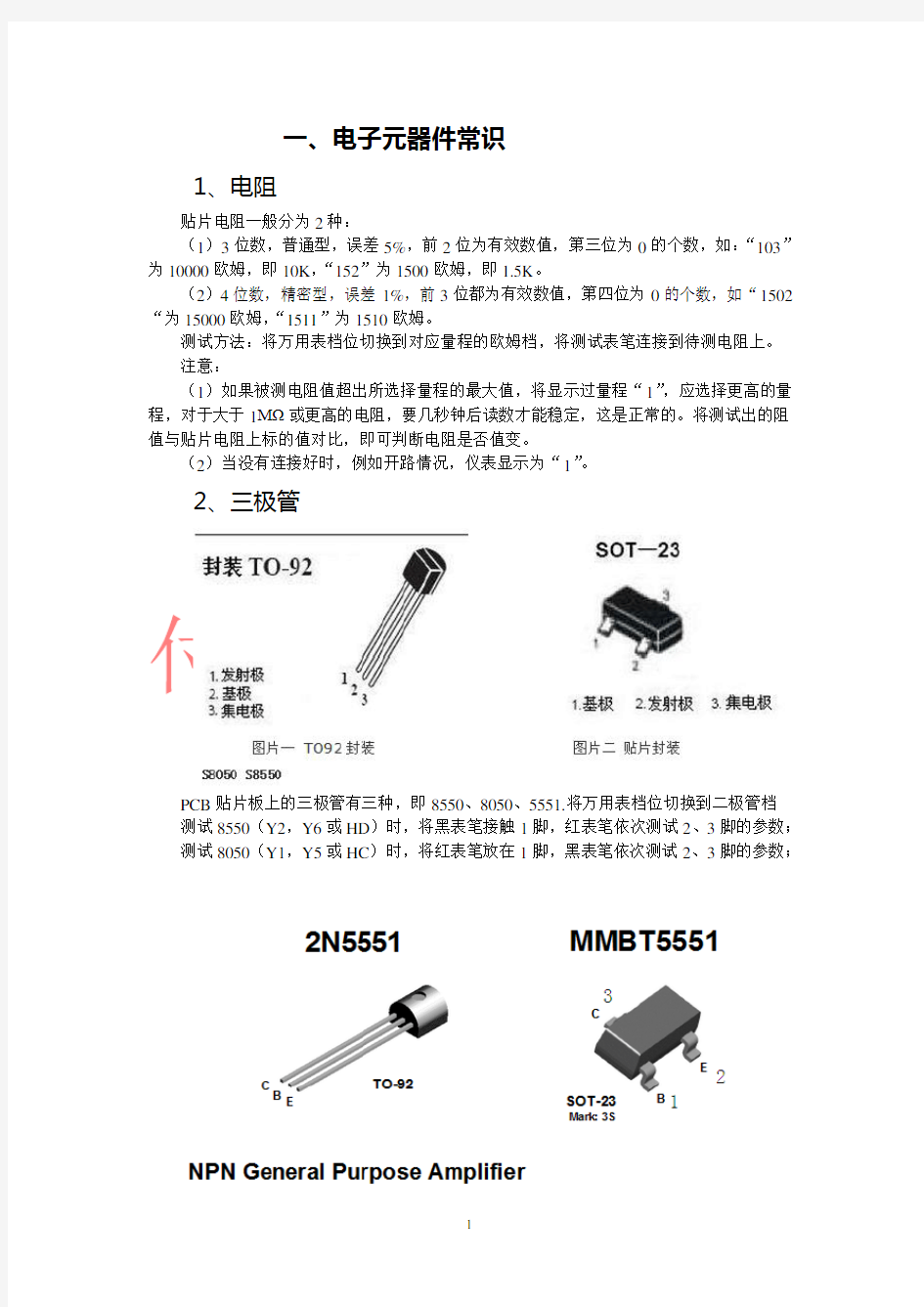
2、三极管
PCB贴片板上的三极管有三种,即8550、8050、5551.将万用表档位切换到二极管档测试8550(Y2,Y6或HD)时,将黑表笔接触1脚,红表笔依次测试2、3脚的参数;
测试8050(Y1,Y5或HC)时,将红表笔放在1脚,黑表笔依次测试2、3脚的参数;
测试5551(G1)时,将红表笔放在1脚,黑表笔依次测试2、3脚的参数。
测试A1013时,将黑表笔接触3脚,红表笔依次测试1、2脚的参数;
测试MPSA56时,将黑表笔接触2脚,红表笔依次测试1、3脚的参数;
3、直插电解电容标识和含义
(1)电解电容标识的含义:以63V/1000uF为例,63V是电容的耐压值,1000uF是电容的容量。
(2)正负极的判断:在灰色的部分一般有两条矩形框,那么挨着这个灰色部分最近的引脚就是负极了。
检修实例:
1、故障现象:电机不转,加电转动转把,电机有发沉的感觉,过一会电机转动轻松。
检修:测各测试点电压正常,测mos管48V驱动无电压,检查发现粗红线不通,压头端压住线皮,更换测试正常。
2.故障现象:不转。
检修:加电测14.2V电压升为17.6V,测学习线端1.6V,测LED故障指示灯阳极电压为1.6V,此现象属于芯片无程序。(如果是开关电源时,如果芯片无程序,此时14.2V会升高到17V左右;)
还有一种极少情况,是芯片各管脚电压正常,电机转动正常,但就是14.4升高为17.6V,此时可能是14.4V滤波电容25V 220uF损坏,此时用示波器看开关电源集电极振荡频率在3—4KHz之间,正常时在200Hz左右;14.4V电压端有很明显的波形。
3.故障现象:电机动一下,转不起来。
检修:加电测各主要测试点电压均正常,短接学习线或转动调速把,电机动一下就停,此故障属于缺相,多数是三相输出线有某一项压线端压在绝缘皮上。
4.故障现象:目测78L05烧裂,16V 470UF鼓裂,芯片有烧毁,三相低端的121、511电阻烧毁,A相低端P3 Y6驱动烧毁。
检修:将烧毁的元件拆下,安装78L05和16V 470ufF,加电测14V只有12.6V,电流偏大100mA,断电测三相低端驱动,三个(Y5)、两个(Y6)都损坏,拆下加电测14V电压为16.8V,说明电源部分正常。断电补装其它损坏元件,加电测试电机运转正常。
二.电路原理及相关故障分析
2.1控制器主要调试点电压数据
汇科方案:48V电源为准,上电后以下的正常数据如下:
1、LM317输出电压为14.5V,78L05输出电压为5.0V,调速把电压(5V-OUT)为
4.25V。
2、LM358-1脚的电压为1.4V,对应芯片第16管脚,LM358-7脚的电压为3.8V,
对应芯片第25管脚。
3、MCU-14脚的电压为3.8V。(电压小于3.25V为欠压,电压大于4.8V为过
压)
4、静态(指控制器加电,不让电机转)时每个MOS管的栅极电压为0V,如果
某个MOS管的栅极不为0V,则对应的驱动电路或MOS管出错。静态如果测上臂MOS管第一个管脚有电压,断开电机三条线,以此来区分哪一相有
问题;静态如果测得下臂MOS管第一个管脚有电压,则是该相释放Y5三极管损坏或其第二管脚接地开路。
5、调速把电压1.2V-3.8V有效,对应的CPU-13脚的电压为0.8V-3.8V。
6、MCU-31脚为刹车指令输入脚,正常为5V,刹车有效时为0.5V以下。
7、MCU-30脚为倒车指令输入脚,正常为5V,倒车有效时为0.5V以下。
8、MCU-12脚为防盗指令输入脚,正常为5V,防盗有效时为0.5V以下。
9、MCU-8 脚为自学习指令输入脚,正常为5V,自学习时为0.5V以下。
10、MCU-3脚为助力指令输入脚。助力传感器一般为数字式,输出为方波信号2.2集成稳压电路
汇科Lm317集成稳压电源
协昌Lm317集成稳压电源
以汇科为例:48V电源通过电阻R1进入Lm317集成稳压电路,Lm317输出端电压=1.25*(1+R3/R2)=14.5V,给驱动电路提供电源。78L05是5V稳压电路,给CPU及其它电路提供电源。
4.2.1故障分析
1.在实际维修中,经常出现无5V输出的情况,这时应先检查有无14.5V,如没有14.5V再检查R1阻值是否对,以及R2,R3是否虚焊或损坏。另一种情况14.5点电压只有几伏,这是电路有短路故障,导致电阻R1压降过大造成,此时R1会发烫冒烟。
2.当无5V或低于5V输出,而14.5V正常时可能是78L05损坏,判断的方法是将78L05输出端跷起,通过测量电压判断好坏。
3.另外当5V输出很低时,常是主芯片击穿造成。此时可以再测C16上端对地数值综合判断。
4.2.2 检修实例(汇科6管)
1.故障现象:R1电阻发烫,14V电压偏低。断电用二极管档测LM317③对地数值远远低于正常值1300,拆掉C1 104电容,再测量数值正常,说明C1漏电,更换加电测14V和5V电压正常,电阻温度正常。
2.故障现象:加电测14电压为31V,功率电阻温度正常。断电在路测R2(102 1K电阻)、R3(103 10K电阻)正常,怀疑LM317损坏,拆下,发现LM317①管脚齐根断,更换LM317加电测试正常。
3.故障现象:电机转,但转速慢。
检修:把调速把调到最大,此时测上臂第一个管脚电压25.6V,下臂第一个管脚电压1.8V。测升压二极管阳极只有6V,测LM317输出电压6V并随着电机转
动快慢而变化,78L05输出电压4.5V,断电测R2阻值9.9K。拆下测量为11.6K,更换测试正常。
MOS管第一个管脚是栅极,用字母G表示;
MOS管第二个管脚是漏极,用字母D表示,漏极和散热片相连;
MOS管第三个管脚是源极,用字母S表示。
2.3开关稳压电源
这是一个开关稳压电路,该电路功耗低,具有短路保护功能,输入电压范围宽,一般从24V-80V不等,能提供稳定的14.5V和5V输出。下图为电源变换电路,现做简单的介绍
矽成微开关电源电路
电源通过电阻R100、R101、R102提供启动电流,使得稳压电路U3 78L05、运放LM358正常工作(LM358的第一部分在此用作比较器),同时也使得其他IC 电路全部工作起来。主要由LM358、Q13、Q14、R105、R106、R107、C36、C2等形成一个简易的开关电源电路,使得开关电源的电压保持在14V左右,78L05输出稳定的5V电源。
2.3.1电源故障检测:
如果14V、5V负载器件损坏或损伤,都有可能引起开关电源的不正常工作。
检测方法一:去掉全部外接的部分,打开电源,使用万用表直流档测量14V、5V电源是否正常,如果不正常,应首先修理电源部分,使得电源正常工作。如果正常则是负载部分有短路故障。
检测方法二、在关闭电源情况下用万用表电阻档测量14V电源输出端与地的电阻为7KΩ左右,5V电源输出端与地的电阻为1K左右。如果以上数值不对,可检查的相关元件,排除故障。
2.3.2维修经验:
1.开机后如测得78L05输出为8V左右,一般来说是电源部分MPSA56或A1013
损坏。
2.本电路只有在调速把或电机霍尔接上后电路才有稳定的5V输出。
3.开机后15V只有零点几伏,电阻R100、R101、R102开路、虚焊。如15V电压
升到25V左右,多是MPSA56(A1013)、2N5551击穿损坏。
4.开机后15V升到30V左右,应检查LM358是否虚焊,MPSA56(A1013)是否损
坏,如没有坏,应测量LM358一脚电压1.5伏是否升到了5伏,如是LM358坏。
5.开机15V和5V都不正常,应检查驱动电路,一般是下臂驱动电路Y6损坏
或CPU主芯片击穿等。
2.3.3维修实例:
1.故障现象:电机转起来,测得14.5V电压降为10V左右,电流正常。
检修:此故障属于电源部分有问题,电机转起来后,电流会增大,此时大功率电阻R105、R106、R107(3只680欧 3W并联,等效电阻227欧)压降会增大,所以重点检查大功率电阻是否损坏。
2.故障现象:不转
检修:加电测14.2V为38.2V,5V电压正常。断电测LM358第4脚对地数值很大,说明LM358第4脚接地开路或虚焊。
4.故障现象:不转
检修:加电测14.2V为21.8V,5V电压正常。断电测开关管A1013 bc结击穿,ce、be结开路,更换加电测电源电压正常。
5.故障现象:不转
检修:加电测电源14.2V只有5.9V,5V为4.4V,测电源48V正常,电流正常,判断电源转换部分有问题,断电测开关三极管,be结数值999,远远高于正常值600左右,更换开关三极管,加电测14.2V、5V正常,其它功能也正常
6.故障现象:14.4V电压只有5.7V。
检修:加电测电源14.4V电压只有 5.7V,断电测开关三极管正常,测Q14 2N5551(G1) be结击穿,更换加电14.4V正常,其它功能测试正常。
7.故障现象:电机转动正常,但电源14.4V升高为17.6V。
检修:电机转动正常,说明芯片工作基本正常,测LM358第1脚电压0.4V,第2脚电压3.0V,3脚电压2.5V;静态时用示波器看开关管集电极波形振荡在3KHz多,测14.4V端有很高的三角波。说明14.4V滤波不好,更换14.4V滤波电容25V 220uF加电在测波形、电压正常。
2.4欠、过压检测电路
汇科电池欠、过压检测电路是电池电压通过R11(1502 1%)、R12(122 1%)两个电阻分压,C6滤波送到芯片第14脚,芯片14脚的正常电压为3.8V;小于3.25V为欠压,大于4.8V 为过压
2.4.1维修经验
如5V正常,当出现欠、过压故障时,则是R11(1502)虚焊,R12(122)或者C6漏电。R11和R12采用误差1%的精密电阻
2.5 电流采样和过流保护电路
静态下LM358-1脚的电压为1.4V,7脚的电压为3.74V。当1脚电压为0.8V 以下,表示过流保护或保护电路故障。
2.5.1维修经验
1.当R29电阻阻值不对、康铜丝未接都将使LM358-1脚的电压高于1.4V,出现保护故障,电机不转。
2.静态时,当5V正常,LM358-7脚电压为远低于
3.74V时,LM358损坏。出现保护故障,电机不转
3.静态时,LM358第1脚电压低于正常值,多是LM358损坏。
2.5.2维修实例
1.汇科12管,故障现象:自学习工作正常,用调速把低速转动正常,高速时就快一下慢一下。
检修:用调速把让电机转起来,测芯片16脚电压随着转速加快而升高,测LM358第1脚。电压为1.5V,说明358第1脚到芯片16脚线路有问题,经查是过孔内阻变大,用导线连接测试正常。
2.汇科12管,故障现象:不转
检修:加电测14.2V,5V正常,测芯片16脚电压0V,检查LM358,1脚0V、7脚2.2V,更换LM358测试正常。
2.6调速把采样电路
SP调速把信号,电压为 1.2V~3.8V有效,对应的芯片13脚的电压为1.2V-3.89V。XS信号为限速信号,如果这个信号接地,限速时行驶速度控制在
20Km/h以内.
图中(SPD)TS接调速把XS为限速接口
2.6.1故障分析
1.将调速把与控制器连接好,CPU13脚电压不正常原因如下:
a.R53虚焊
b.调速把坏C.电容c2漏电
2.调速把没有拉起,电机就转起来,此故障原因是调速把地线没有接好,或者是CPU13脚虚焊。
检修实例:
1.故障现象:自学习转,用调速把不转。
检修:加电测调速把红线,电压为0.5V,说明调速把供电不正常,测量发现红线开路。
2.故障现象:自学习转,用调速把不转。
检修:加电测调速把红线,电压为4.3V,测调速把绿线有0.8-3.8V,测印制板绿线焊接端无电压,说明绿线开路,挑出绿线发现压线端子压住绿线绝缘皮,更换绿线测试正常。
3.故障现象:转速慢
检修:加电转动调速把到最快状态,测得芯片第31脚电压2.4V,测调速把供电4.2V,断电测C2对地数值800多,怀疑C2 104电容漏电,替换测试正常。此故障是电容漏电形成一个对地电阻,使得调速电压最高只能到 2.4V,致使芯片调速模拟电压偏低造成速度调不上去。
2.7电机霍尔电路
2.7.1故障分析
当不能进入有霍尔状态时可能有如下原因:
1.正常待机状态,用外力拨动电机,电机霍尔信号输入端,应有高低电平变化,如没有变化电机霍尔坏。
2.霍尔供电不正常,电阻R45、R46、R47、R48、R49、R50虚焊,C22、C23、C24漏电,霍尔线插头没接好。
2.8高低电平刹车电路
CPU-31脚为刹车信号输入脚,正常为5V,刹车有效时为0.5V以下。
2.8.1故障分析
1.进行低电平刹车时,BKL端接口接低电平信号,通过D6、R16加到CPU-31脚。当出现低电平刹车无效时,一般是D6、R16虚焊。
2. 进行高电平刹车时,BKH端接口接高电平信号,通过R17、R18加到三极管Q6A的基极使集电极为低电平,实现刹车功能。当出现高电平刹车无效时,
经常Q6A损坏、R17、R18开路或CPU31脚虚焊。
3.Q6A ce结击穿损坏或C10漏电,会造成自学习转,转把不转。
2.9驱动电路,以汇科C相电路分析工作过程
汇科C相驱动电路
MOS管的驱动(以C相为例,A、B两相和C相相同)分为上臂(上桥、高边)驱动和下臂(下桥、低边)驱动两部分。
上臂驱动有1个G1(NPN管)和2个Y2(PNP管)构成驱动主体,当驱动输入信号CH为高电平(一般指为5V)时,Q1C(G1)、Q0C( Y2)导通,使得MOS管(VOC)的栅极电压变高,当大于15V时,MOS管(V0C)导通,Vc的电压变为48V,电源电压加到电机的C相上,其中D0C(M7)、EL7(47uF/50V)构成升压电路,保证上臂MOS管的栅极驱动电压,Q2B(Y2)起到加速关闭MOS管的作用。
下臂有2个Y5(NPN管)和1个Y6(PNP管)构成驱动主体,当驱动输入信号CL 低电平(一般指0.5V以下)时,Q3C、Q4C同时导通,使得MOS管(V6)的栅极电压升高,当大于15V时,MOS管(V6)导通,电源电压流过电机的相线回到电源负极,Q5C起到加速关闭MOS管的作用。
在驱动的元件正常,调速把没有起动的情况下,MOS驱动的各点电压情况如下:
2.9.1 在驱动电路的故障中,缺相是最常见的问题,检查与分析如下:
在维修中常出现调速把加上去后电机需要外力才能转起来,电机噪声很大,是典型的缺相运行。这时应该将调速把转至最大,外力使电机转起来。①测 D1A、D1B、D1C负端对地的电压,如果为29V左右,上臂管驱动正常。②同样方法测电阻R9A、R9B、R9C对地电压,如果为14V左右,下臂管驱动正常。③如果哪一路电压不对,说明那一路有虚焊或原件损坏。④若D1C负端对地的电压不是29V,说明C相有问题,进一步测CH端是否为1.5V左右,若是为正常,否则CPU23脚虚焊。然后测量Q0C发射极与集电极电压是否接近相等,如差别在1V之上,则是Q0C损坏。根据经验C相缺相,Q0C出问题概率很大。⑤假如C相下臂驱动电压不对,测CL端是否为3.3V左右,若是为正常,否则CPU17脚虚焊。然后测Q5C集电极电压,如很小,R9C虚焊或Q5C损坏,据经验Q5C坏的可能性很大。
2.10.1 故障指示灯.一长一短闪烁维修经验
1.驱动电路有故障应将上下臂桥分开来检查,①检查上臂MOS管G脚对低阻抗应该在22K左右,过高过低都说明这一相故障。然后检查这一相晶体管、二极管、电阻是否损坏。②检查下臂MOS管G脚对低阻抗应该在13K左右,过高过低都说明有故障。然后检查这一相晶体管、二极管、电阻之类是否损坏。
2.当ABC三相驱动电路没有查出问题时,可查一下LM358周边电路有无故障,如正常一般是LM358损坏,这一问题偶尔发生。
2.10.2 检修实例:
1.故障现象:电机不转。加电测MOS管G极电压为0V,15V为16.66V,5V正常,欠压值3.78V,芯片第5脚电压为1.8V,16脚电压为1.38V,更换LM358,测MCU第16脚电压为1.42V,电机还是不转,再测MOS管G极,发现C相下端G 极有3.26V电压,测驱动电路,发现Q5C(Y5)be结损坏,更换测G极为0,学习正常。
2.故障现象:电机不转。测基本数据均正常,转调速把同时加外力电机可以转起来,测栅极电压发现C相上臂G极电压低于A、B相,观察发现C相自举升压电容旁有腐蚀,断电拆下升压电容,刮开保护膜,发现电容正极焊盘印制板腐蚀断。连接测试正常。如果是负极焊盘开路会造成击穿MOS管。
3.故障现象:电机不转,测得A相上臂G极有5.2V电压。更换mos管,测得电压为0V,电机转动正常。
4.故障现象:电机一顿一顿,偶尔能转动起来,当电机转起来测得A相上臂G 极电压高于其它两相,测A相驱动G1基极为1.5V,发射极为1.3V,而B、C相驱动G1 基极和发射极都没有电压,测芯片23、24管脚也无电压,判断芯片坏,
更换加电测试正常。
5.故障现象:将电机调到最高速,测得三相高端G极电压分别是A相25V、B 相位28.8V、C相为23.5V,三相低端G极电压正常。由于是最高速,所以判断B 相驱动正常,主要检修A、C相,测升压电压都是37V,故判断是A、C相上臂驱动电路Q0A、Q0C(Y6)损坏,更换加电测试正常。
6. 汇科6管,故障现象:转动调速把,可以听到咔咔声,电机不转。
检修:转动调速把,同时通过外力让电机转起来,此时测得A相下臂G极无电压,测驱动发现G1基极有4.9V,发射机电压为3.2V,低于正常值4.7V,判断G1 be结损坏,断电测得(红表笔接b极,黑表笔接e极)be结数值为1500多,表明G1损坏,更换加电测试正常。
7.故障现象:15V电压随着电机转速而升高,电机快一下慢一下的转动
故障原因:升压二极管短路
8.故障现象:不转。
检修:测V1B mos管G极有3.2V,测Q5B (Y5) b极有3.9V,e极3.2V,判断为Y5 be结损坏或者e极和地之间线路不同,经查e极和地之间的过孔有问题,处理测试正常
9.故障现象:缺相。
检修:电机全速转起来,测得高端A、C相栅极电压28.2V,B相23.8V,测升压电压,A、C相37.3V,B相23V,D0B阳极6V,电源14V电压,判断B 相14V供电出现问题,经查是过孔内阻大,处理正常。
10.故障现象:不转。
检修:加电测V0C G极有13.2V,S极13.5V,拆下驱动Q0B (Y6)测G极电压为3.5V,S极电压仍然是13.5V,仔细检查发现升压电容EL6(50V 47UF)间有锡丝短路。清除加电测试正常。
11.故障现象:不转。
检修:加电转动转把,电机有咔咔声响,用外力可以转起来,测V1Amos管G 极无电压,测Q3A(Y6) c极有6.1V电压。断电测得R9A(121)电阻开路,更换正常
12.故障现象:不转。
检修:加电测V0C G极有6.8V,升压二极管阳极有7.1V,断电拆下Q0C( Y6),此时测V0C G极电压为0,判断Y6损坏,更换正常。
13.故障现象:电机开始一顿一顿的转,过一会可以转起来。
检修:测A上臂驱动R0A(511)电阻,发现阻值不对,拆下测量开路,更换正常。
14.故障现象:缺相
检修:加电电机转起来,测V0C G极23V,V0A、V0B G极28V,测升压电压时发现D1C (1N4148)人为损坏,更换正常
15.故障现象:不转。
检修:测V1B G极3.5V,Q5B (Y5) 基极3.5V,发射机0V,判断Y5 be 结开路。更换正常
16.故障现象:电机转起来声音不对。
检修:电机转起来,测得高端三相电压A相24.5V,B、C相28.5V。测升压电压A相31.5V,B、C相37.8V。测电源电压发现随着转速增大电源14V电压降低。测A相高端G极释放三极管Q5A(Y6),bc结击穿,更换后加电测试正常,电源
14V也不随着转速而降低。
17.故障现象:电机转起来声音不对。
检修:电机转起来,测得B相下臂mos管G极无电压,测Q4B(Y5)基极5V,发射机3.2V,断电测Y5正常,判断 R17开路,拆下测量此电阻开路,更换测试正常。
18.汇科12管,故障现象:不转,刚加电时,盘动电机发沉,过大约40秒,盘动电机转动灵活。
检修:断开三相输出和电机连接,加电快速测发现A、C相低端G极电压由13V 降到0V,测低端释放三极管Y5,发现A、C相基极为负电压,B相基极0.7V电压。怀疑R8A R8C 102电阻损坏,拆下用20K档测开路,更换测试正常。
19.故障现象:电机不转。
检修:用二极管档(黑表笔接48V,红表笔测)测得V0A栅极对地数值无穷大(正常值1000左右),测R3A(222)一端数值490,测另一端数值为无穷大,怀疑R3A电阻开路,拆下测是开路,更换加电测试正常。
20.故障现象:电机经常出现启动时跳动
检修:电机转起来后,测高低端栅极电压正常,测低端时C相释放三极管Y5基极电压0V,正常值0.4V,集电极电压1V,正常值4.7V,判断此三极管损坏,断电测be结击穿,bc结、ce结均损坏,数值只有140多,更换测试正常。21.故障现象:自学习时电机只向一个方向转,用调速把有时启动有时启动不起来。启动后14.2V会随着调速而降低。(此故障通16例)
检修:让电机转起来,在14.2没有下降时测得高端C相栅极低于AB相,而A 相低端栅极高于其它两相,判断C相驱动有问题。断电测C相上臂驱动电路,测释放三极管Q2B(Y6) bc结击穿,be结、ce结损坏,(如果在刚拿到时直接测量mos管的数值,可以发现D-G间数值很大),更换Y6加电测试正常。
22.故障现象:加电就烧B相Q0B Y6三极管
检修:测Q0B Y6三个结均击穿。测升压二极管D0B(M7)击穿,更换后测试正常。
23.故障现象:电机转,但B相上臂栅极电压高于A、C相1V,B相下臂栅极高于A、C相0.5V。
检修:测升压电压一致,更换上臂驱动Y6故障依旧,进而更换B相下臂驱动Y6加电测试正常。
23.故障现象:不转
检修:测V0C mos管击穿,更换。测D1A、D1B击穿短路,Q0A、Q0B损坏,测V1C mos管,发现S极和地开路,更换加电测试正常。
24.故障现象:不转
加电测V0C mos管栅极有20.5V,判断为V0C mos管栅极开路;V1C栅极有1.8V,测释放三极管Y5基极有2.5V,发射机0V,判断Y5 be结损坏,断电更换加电测试正常。
25.故障现象:不转
检修:EL3 25V 220uF电容鼓,测V0B mos管击穿,更换加电电机转速慢。断电测三个升压二极管击穿,B、C相上臂驱动三极管Y6损坏,更换损坏元件,后加电三个升压二极管再次击穿。去掉三个升压二极管,加电测LM317的输出。发现刚加电时输出电压在37.6V,过一会就下降到正常值14.4V,怀疑317有问题,更换加电电压为14.4V。补装升压二极管测试正常。
26.故障现象:电机转,但三相高低端栅极电压都不一样。
检修:加电测三相栅极电压,A相上臂27V,下臂3.3V;B相上臂28V,下臂4.6V;C相上臂29.4V,下臂5.0V,此故障是C相无霍尔检测电路中的CB1(220nF)电容容量不够造成的。
27.汇科12管,故障现象:不转
检修:黑表笔接D极(漏极),红表笔测B相上臂栅极(G极)数值为1700多,正常值1050左右,测表贴件正常,测Y6上方的过孔数值很大,处理测试正常。
28.故障现象:加电就烧第5、6个mos管
检修:拆掉第5、6个mos管,加电测得第5个mos管栅极有13.5V电压,测驱动G1基极有4V,测第6个mos管释放三极管Y5基极有4.5V,发射极有4.5V,断电测发射极对地数值很大。说明发射极对地开路,将过孔处理加电测发射极无电压,进一步测第5个mos管栅极无电压,加装两个mos管加电测试正常。29. 汇科12管,V5-V8击穿,更换后加电测试不转
检修:用红表笔接栅极,黑表笔接源极测上臂MOS管数值,V1、V2、V5、V5数值为600左右,正常;V9、V10MOS管数值为无穷大。调换表笔测V1、V2、V5、V6数值为1090左右,V9、V10数值为1260,测V9、V10驱动电路,发现27欧电阻开路,更换测试正常。
30. 汇科12管,故障现象:不转
加电测B相上臂MOG管栅极有12.4V,测D1B阳极有12.7V,断电测中间Y6三极管be结击穿,更换测试正常。
2.11控制器自学习方法
控制器上电后,将自学习端口与地接好,电机应能正常转动,然后停止,此时拔下学习端口,控制器学习完成。如发现电机倒转,拔下学习端口再接上,电机正转控制器学习完成。
2.11.1故障分析
控制器上电后,将自学习端口与地接好,电机不转动无法判定故障点,分析如下:
①首先测量14.5V、5V电压是否正常。不正常检修电源部分。
②上电后,用外力拨动电机,测量cpu17、18、19、20、23、24脚的电压
应在3V~5V跳变,如不是CPU坏或CPU无程序。
③用外力拨动电机,测量每一相MOS管G极电压是否跳变。如那一相不变,
就是那一相驱动有故障。
2.12无霍尔换相电路:
无霍尔状态是利用CPU内部强大的AD功能,采样电机反电势信号,软件模拟出外部比较器的输出信号,实现无霍尔取样。
汇科无霍尔换相电路原理图
矽成微无霍尔换相原理图
协昌无霍尔换相原理图
汇科检修实例:
1.故障现象:电机低速可以转起来,声音不对,同时拉低电源电压。
检修:此故障一般是由于移相电路采样出现问题造成的。测RC2对地电阻为17K,
RB2、RA2对地电阻19K,对地发现C相采样电路有问题,怀疑RC1 51K电阻有问题,拆下测为47K,更换加电测试正常。(RA1、RB1、RC1这三个电阻易出现阻值变小,CA1、CB1、CC1 220nF易出现漏电或开路)
2.故障现象:电机稍微转的快一些就停转。
检修:让电机转起来,测得三相栅极电如下:高端A相6.1V,B相5.7,C相5.3V;低端A相3.7V,B相3.7V,C相6.4V,更换A相无霍尔检测电路CA1 224电容加电测试正常。
3.故障现象:转不起来,声音不正常。
检修:RC4 3.3K开路。
4. 故障现象:电机转,声音不正常。
检修:让电机最高速转,测得A相高端29.9V,B、C相27.5V,A相低端4.3V,B相低端5.5V,C相低端4.5V,测LM339第1、2脚2.3V,第14脚2.8V,断电测反电动势取样电阻对地数值,A相17K,B、C相19K,拆下RA1测为40K,更换加电测试正常。
5. 6管汇科,电机一顿一顿,转不起来;
检修:测LM339第1、2、14管脚电压为5V,测第3脚为0V,说明LM339供电13.3V开路。
6. 12管汇科,电机一顿一顿,转不起来
检修:在路测D0A下方的过孔对地电阻为32.9K,D0B下方过孔对地阻值为44.2K,测RC2右端对地电阻为32.9K,在路测RB1(100K)为54.3K,怀疑此电阻损坏,拆下测为开路,再测三个测试点对地电阻为31.5K,测试正常。
7. 12管汇科,电机一顿一顿,转不起来
检修:测LM339第1、2、14管脚电压为1.7V(正常值为0.1V),测3管脚电压13.3V正常,测第11脚为0.4V(正常值为2.5V),测RD1、RD2电阻正常,判断339损坏,更换测试正常。
8. 12管汇科,电机一顿一顿,转不起来
检修:接好电机和电源,加电转动电机,测LM339第1、2管脚有变化的电压,第14管脚无变化电压,测R12(222 2.2K)开路,更换加电测试正常。
9. 6管汇科,电机一顿一顿,转不起来
检修,接好电机和电源,加电测LM339第1管脚有5V电压,正常值为0.1V,怀疑339损坏,更换测试正常。
2.13其它辅助电路(ABS、倒车、1:1、巡航、防盗、三速、故障指示)
●助力电路:当CPU3脚接收到助力传感器的信号,实现1:1助力。
PA2是助力指令信号输入端,助力脉冲经过R20、C14组成的RC滤波后送给芯片第3管脚,遇到助力功能不起作用,检查R20是否开路和C14是否漏电,还有就是助力端子到线路板三条线是否开路。
●倒车电路:MCU的32高电平,电机正传;低电平,电机反转。
检修实例:
1.故障现象:电机转速慢。
检修:加电测14.2V、5V正常,把调速把调到最高速,测得调速电压3.6V,测芯片第32脚电压0V,断电测芯片32脚对地短路。拆下C21测量短路。更换加电测试转速正常。
●巡航电路:MCU的3脚高电平,默认为手动巡航,低电平触发进入巡航;上电
为低电平,默认为8秒自动巡航
●EBS电路:MCU的2脚为EBS选择信号输入,高电平默认普通刹车;低电平默认为EBS刹车。
●防盗电路:MCU的12脚位锁电机信号,低电平时,控制器利用无刷电机的特
点,自动锁死电机,使其不能转动,高电平时,解除锁电机功能。
防盗电路
检修实例:
1.故障现象:自学习转,调速把不转。
检修:加电测cpu21脚电压0V,测R87一端有48V,另一端0V,断电测R75 512电阻短路,拆下测R75印制板两端仍然短路,用镊子划焊盘中间,再测正常。重新焊好512电阻测试正常。
●三速电路:CPU22脚为三速备用脚,上电后,速度为最高时速的100 %,触发一次为最高时速的120 %,再触发一次为最高时速的80 %,再触发将按100%→120%→80%→100%的顺序循环。
从以上图中看出本系列电路板有多种接口,如发现某一种功能没有,一是软件无此功能,或着元件虚焊接口接错等。
三、汇科控制器方案主芯片(CPU)引脚说明
1脚:RESET,复位脚。
2脚:EBS信号输入脚,正常为5V,有效信号为0.5V以下。
3脚:巡航信号输入脚,上电时为5V默认为脉冲触发型(手动)巡航;上电时为0.5V以下默认为自动6秒巡航。
4脚:电源地。
5脚:芯片内部电源。
6脚:电源+5V。
7脚:备用输入/输出口。
8脚:自学习信号输入脚,正常为5V,有效信号为0.5V以下(备用)。9脚:霍尔U相输入,脉冲有效。
10脚:霍尔V相输入,脉冲有效。
11脚:霍尔W相输入,脉冲有效。
12脚:刹车信号输入脚,正常为5V,有效信号为0.5V以下。
13脚:反电动势U相输入,类似正弦波形。
14脚:反电动势V相输入,类似正弦波形。
15脚:反电动势W相输入,类似正弦波形。
16脚:相电流信号采样输入1,模拟信号。
17脚:C相MOS低边驱动,低有效。
18脚:B相MOS低边驱动,低有效。
19脚:A相MOS低边驱动,低有效。
20脚:A相MOS高边驱动,高有效。
21脚:LV/CK:低电平锁电机信号
22脚:三速备用脚,上电后,速度为最高时速的100 %,触发一次为最高时速的120 %,再触发一次为最高时速的80 %,再触发将按100%→120%→80%→100%的顺序循环。。
23脚:C相MOS高边驱动,高有效。
24脚:B相MOS高边驱动,高有效。
25脚:短路保护输入,和LM358-7脚相连。
26脚:SWIM,调试与编程接口。
27脚:1:1助力信号输,脉冲有效。
28脚:平均电流信号采样输入2,模拟信号。
29脚:LED故障信号指示灯/零功耗电门锁关闭信号。
30脚:电源电压采样,小于3.44V为欠压,模拟信号。
比亚迪E6纯电动汽车动力系统的结构与检修
比亚迪E6纯电动汽车使用磷酸埋钻铁电池,200Ah的超大电池容量使车辆在综合工况下续驶里程超过300km,每100km的能耗在21度(1度=1 kWh)以内,每1 00km的加速时间为10s,最高车速可达160km/h以上。车辆充电比较方便,快充可以使用充电站的380V充电桩充电,慢充可需220V民用交流电源,慢充6~8小时可充满电池。 一、比亚迪E6纯电动汽车动力系统的结构 1.比亚迪E6纯电动汽车动力系统 比亚迪E6纯电动汽车动力系统结构及原理如图1所示,其主要由三大模块组成。
(1)电动车的控制模块可分为:电机控制器、DC-DC、动力配电箱、主控ECU、挡位控制器、加速踏板、电池管理单元。 (2)电动车的动力模块有:电动机总成、电池包体总成。
(3)电动车高压辅助模块有:车载慢充、漏电保护器、车载充电口、应急开关。 2.动力控制系统的工作原理 (1)充电过程 充电站的380V高压充电桩通过车辆上的充电口,或者220V市用电源通过车载充电器升压后输电给车上的配电箱,配电箱直接途径应急开关后对Hv电池组充电。在充电过程当中,电源管理器一直监控着HV电池组的温度和电压,如果发现HV电池组内部某单体温度或电压过高,就会切断配电箱给HV电池组的供电。 (2)放电过程 HV电池组在电源管理器和漏电保护器的监控下,通过应急开关输电给配电箱,配电箱根据车辆的实际用电情况分配电量。一部分电量流向电机控制器,另一部分电量流向DC-DC交换器。主控ECU根据驾驶员操作信息(接收加速踏板角度传感器和挡位控制器的信号)控制着电机控制器的工作,电机控制器主要控制流向电机的电量大小,以及控制电机正反转来驱动车辆前进或后退。另一部分从配电箱流向DC-DC交换器的电量,经过DC-DC交换器将高压直流电转化为低压直流电,为车辆电动液压助力转向系统提供42V的电源,同时还为整车用电设备提供12V的电源。 3.动力系统各部件的作用 (1)电机控制器:负责控制电机的前进、倒退、维持电动车的正常运转,关键零部件为IGBT。IGBT实际为大电容,目的是为了控制电流的工作,保证能够按照我们的意愿输出合适的电流参数。 (2)DC-DC:负责将330V高压直流转低压提供给车载低压用电设备,如
电动车控制器维修
、电子元器件常识 1、电阻 贴片电阻一般分为 2种: (1) 3位数,普通型,误差 5%前2位为有效数值,第三位为 0的个数口: “103” 为 10000欧姆,即10K , 152”为1500欧姆,即1.5K 。 (2) 4位数,精密型,误差1%,前3位都为有效数值,第四位为0的个数,女口 1502 “为 15000 欧姆,‘1511 ” 为1510 欧姆。 测试方法:将万用表档位切换到对应量程的欧姆档,将测试表笔连接到待测电阻上。 (1) 如果被测电阻值超出所选择量程的最大值, 将显示过量程“ 1”应选择更高的量程, 对 于大于1M Q 或更高的电阻,要几秒钟后读数才能稳定,这是正常的。将测试出的阻值与 贴片电阻上标的值对比,即可判断电阻是否值变。 (2) 当没有连接好时,例如开路情况,仪表显示为“ 1”。 2、三极管 8550、8050、5551.将万用表档位切换到二极管档 测试8550 (Y2, Y6或HD )时,将黑表笔接触 1脚,红表笔依次测试 2、3脚的参数; 测试8050 (Y1, Y5或HC )时,将红表笔放在 1脚,黑表笔依次测试 2、3脚的参数; 封装TO 92 SOT 一 23 图片一TO 号2封叢 1基极二发射极3集电极 图片二贴片封装 PCB 贴片板上的三极管有三种,即 SOT-23 B 1
MMBT5551 2NSS51 Marie 3S NPN General Purpose Amplifier
测试5551 (G1 )时,将红表笔放在 1脚,黑表笔依次测试 2、3脚的参数。 2SA1013 TRANSISTOR(PNP) Pen : 0.9W Collector ciiirrent I GM ; -1 A Colloctor-bfiBO voltage V|HFI|C&D : -150 V Op&rollri y add Junctla-ini tem pqrfiti TjJrrtge IO ? 15C*C 测试A1013时,将黑表笔接触 3脚,红表笔依次测试 1、2脚的参数; ——-=1 MPSA56 PNP generai purpose Transistor 测试MPSA56时,将黑表笔接触 2脚,红表笔依次测试 1、3脚的参数; 3、直插电解电容标识和含义 (1)电解电容标识的含义:以 63V/1000UF 为例,63V 是电容的耐压值,1000uF 是电容的 容量。 (2)正负极的判断:在灰色的部分一般有两条矩形框,那么挨着这个灰色部分最近的引 脚就是负极了。 检修实例: 1、故障现象:电机不转,加电转动转把,电机有发沉的感觉,过一会电机 转动轻松。 m TO-92MOD II 1 EMITTER II .II 1 2.COLLECTOR 1 3 6ASE 0! 1 s uEl 23 FEATURES PIN DESCRIPTION 1 colector 2 base 3 emtter Fig 1 Simplifiedoutlre (TO-92: SOT54I and symbol PINNING
常用电动车控制器电路及原理大全
!!电动自行车控制器电路原理分析 目前流行的电动自行车、电动摩托车大都使用直流电机,对直流电机调速的控制器有很多种类。电动车控制器核心是脉宽调制(PWM)器,而一款完善的控制器,还应具有电瓶欠压保护、电机过流保护、刹车断电、电量显示等功能。 电动车控制器以功率大小可分为大功率、中功率、小功率三类。电动自行车使用小功率的,货运三轮车和电摩托要使用中功率和大功率的。从配合电机分,可分为有刷、无刷两大类。关于无刷控制器,受目前的技术和成本制约,损坏率较高。笔者认为,无刷控制器维修应以生产厂商为主。而应用较多的有刷控制器,是完全可以用同类控制器进行直接代换或维修的。 本文分别介绍国内部分具有代表性的电动自行车控制器整机电路,并指出与其他产品的不同之处及其特点。所列电路均是根据实物进行测绘所得,绍具体实例,达到举一反三的目的。 1. 有刷控制器实例 (1)山东某牌带电量显示有刷控制器 电路方框图见图1。 图中元件号为笔者所标。通过介 1)电路原理 电路原理图见图2 所示,该控制器由稳压电源电路、 电池放电指示电路、电机过流及蓄电池过放电保护电路等组 PWM产生电路、电机驱动电路、蓄
稳压电源由V3(TL431) ,Q3等元件组成,从36V蓄电池经过串联稳压后得到+12V电压,给控制电路供电,调节VR6可校准+12V 电源。 PWM电路以脉宽调制器TL494 为核心组成。R3、C4与内部电路产生振荡,频率大约为12kHz。 H是高变低型霍尔速度控制转把,由松开到旋紧时,其输出端可得到4V—1V 的电压。该电压加到TL494 的②脚,与①脚电压进行比较,在⑧脚得到调宽脉冲。②脚电压越低,⑧ 脚输出的调宽脉冲的低电平部分越宽,电机转速越高,电位器VR2用于零速调节,调节VR2 使转把松开时电机停转再过一点。 电机驱动电路由Q1、Q2、Q4等元件组成。电机MOTOR为永磁直流有刷电机。TL494 的⑧ 脚输出的调宽脉冲,经Q1反相放大驱动VDMOS管Q2。TL494 的⑧脚输出的调宽脉冲低电平部分越宽,则Q2导通时间越长,电机转速越高。D1 是电机续流二极管,防止Q2击穿。TL494 的⑧脚输出低电平时,Q1、D2导通,Q4截止,Q2导通;TL494 的⑧脚输出高电平时,Q1、D2截止,Q4导通,迅速将Q2栅极电荷泄放,加速Q2的截止过程,对降低 Q2温度有十分重要的作用。 蓄电池放电指示电路由LM324组成四个比较器,12V由R24、VR1、VR4、VR3、VR5、R21 分压形成四个不同基准电压分别加到四个比较器的反相端。蓄电池电压经R23和R22 分压加到每个比较器的同相端,该电压和蓄电池电压成比例。VA=VB*R22/(R22+R23)。当蓄电池电 压不低于38V时,LED1、LED2、LED3均点亮;当电池电压低于38V时,LED3熄灭;当电池电压低于35V时,LED2熄灭;当电池电压低于33V时,LED1熄灭,此时应给电池充电。调节VR1、VR4、VR3可分别设定LED3、LED2、LED1熄灭时的电压。LED4用作电源指示,LED5 用作欠压切断控制器输出指示。 蓄电池过放电保护当蓄电池放电到31.5V 时.LM324 的①脚输出低电平,三极管Q5导通,约5V电压加到TL494的死区控制端④脚. 该脚电位≥ 3.5V,就会迫使TL494内部调宽脉冲输出管截止,从而使三极管Q1、Q2 截止,电机停止运转,蓄电池放电停止,进入电池
纯电动汽车整车控制器(TAC)
纯电动汽车整车控制器(TAC) 项目介绍: 纯电动汽车整车控制器对新能源汽车的动力性、安全性、经济性、操纵稳定性和舒适性等都有重要影响,它是新能源汽车上的一种关键装置。在车辆行驶过程中,整车控制器通过开关输入端口、模拟量转换模块、CAN总线等硬件线路采集路况信息、驾驶员意图、车辆状态、 设备运行状态等参数,依托高速运行的 CPU和控制端口来执行预设的控制算法和管理策略,再将指令和信息等通过 CAN总线、开关输出端口等对动力系统的执行部件进行实时的、可靠的、科学的控制,以实现车辆的动力性、可靠性和经济性。 其硬件结构框图如图一所示。
tihJTJt 川“ J人 整车控制器实物图如图二所 示。 it电" * st 电 M U 电柢第iC 4- if 邨 ESlh 卜 [? ■: *■ DC IX*科电乳 ■ 1 .^ptt'AN :■' - 彝竝 tt」 7%谢洩M!* WI KX T.7*帀小
性能指标: 1)工作环境温度:-30 C—+80C 2)相对湿度:5%~93% 3)海拔高度:不大于3000m 4)工作电压:18VDC —32VDC 5)防护等级:IP65 功能指标: 1)系统响应快,实时性高 2)采用双路 CAN总线(商用车 SAE J1939协议) 3)多路模拟量采样(采样精度10位);2路模拟量输出(精度 12位)4)多路低/高端开关输出 5)多路I/O输入 6)关键信息存储 7)脉冲输入捕捉 8)低功耗,休眠唤醒功能 该项目使用的INFINEON 的物料清单:
整车控制器(VMS, vehicle management Syetem ),即动力总成控制器。是整个汽车的核心控制部件,它采集加速踏板信号、制动踏板信号及其他部件信号,并做出相应判断后, 控制下层的各部件控制器的动作,驱动汽车正常行驶。作为汽车的指挥管理中心,动力总成控制器主要功能包括:驱动力矩控制、制动能量的优化控制、整车的能量管理、CAN网 络的维护和管理、故障的诊断和处理、车辆状态监视等,它起着控制车辆运行的作用。因此VMS的优劣直接影响着整车性能。 纯电动汽车整车控制器 (Vehicle Controller)是纯电动汽车整车控制系统的核心部件,它对汽车的正常行驶,再生能量回收,网络管理,故障诊断与处理,车辆的状态与监视等功能起着关键的作用。 与各部件控制器的动态控制相比,整车控制器属于管理协调型控制。 整个车辆系统采用一体化集成控制与分布式处理的车辆控制系统的体系结构,各部件都有 独立的控制器,整车控制器对整个系统进行能量管理及各部件的协调控制。为满足系统数 据交换量大,实时性、可靠性要求高的特点,整个分布式控制系统之间采用CAN总线进 行通讯。 整车控制器主要由控制器主芯片,Flash存储器和RAM存储器及相关电路组成,控制器主 芯片的输出与Flash存储器和RAM存储器的输入相连。 整车控制器通过 CAN总线接口连接到整车的 CAN网络上与整车其余控制节点进行信息交换和控制。 控制器硬件包括微处理器、CAN通信模块、BDM调试模块、串口通信模块、电源及保护 电路模块等。微处理器选用了Motorola公司专门为汽车电子开发的MCgS12,它具有运 算速度快和内部资源与接口丰富的特点,适合实现整车复杂的控制策略和算法。CAN通信 模块符合CAN2.0B技术规范,采用了光电隔离、电源隔离等多项抗干扰设计;BDM调试模块用于实时对控制程序进行调试、修改;串口通信模块用于对控制系统的诊断和标定;电源模块进行了二级滤波的冗余设计,保证控制器在车载12V系统供电情况下正常工作,并具短路保护功能。 CAN,全称为"Controller Area Network ”,即控制器局域网,是一种国际标准的,高性价的现场总线,在自动控制领域具有重要作用。CAN是一种多主方式的串行通讯总线,具有较高的实时性能,因此,广泛应用于汽车工业、航空工业、工业控制、安全防护等领域。 决策层控制单元是车辆智能化的关键,其收集车辆运行过程中的信息,并根据智能算法的决 策向物理器件层控制单元发送命令;动力源控制单元负责调节动力源系统部件以满足决策层控制单元的命令要求;驱动/制动控制单元则调节双向变量电机和能耗制动系统实现车辆的各种工况,如驱动控制、防抱制动等。 整车控制器功能需求: 整车控制器在汽车行驶过程中执行多项任务,具体功能包括:(1)接收、处理驾驶员的驾驶
新能源电动汽车维修资料大全
目录: 第1章比亚迪电动汽车 001 n 1.1 比亚迪秦EV 001 n 1.1.1 高压控制模块ECU端子分布 001 n 1.1.2 电动助力转向系统(EPS)电路与针脚定义 001 n 1.1.3 电子驻车系统(EPB)ECU端子检测 003 n 1.1.4 安全气囊系统ECU端子检测 004 n 1.1.5 智能钥匙系统ECU端子检测 006 n 1.1.6 防盗系统ECU端子检测 007 n 1.1.7 中控门锁ECU端子检测 008 n 1.1.8 电动空调系统ECU端子检测 009 n 1.1.9 多媒体系统ECU端子检测 010 n 1.1.10 多媒体系统外置功放端子检测 011 n 1.1.11 全景系统ECU端子检测 013 n 1.1.12 全景系统组件位置与电路图 013 n 1.2 比亚迪E5 015 n 1.2.1 高压控制模块端子分布与ECU针脚信息 015 n 1.2.2 主控制系统ECU端子检测 017 n 1.2.3 电池管理系统ECU端子检测 019 n 1.2.4 漏电传感器电路 020 n 1.3 比亚迪E6 021 n 1.3.1 多媒体系统/CD配置电路图 021 n 1.3.2 多媒体系统CD主机ECU端子检测 023 n 1.3.3 多媒体系统/DVD配置电路图 023 n 1.3.4 多媒体系统/DVD配置端子检测 030 n 1.4 比亚迪唐PHEV 034 n 1.4.1 高压电池包电路图 034 n 1.4.2 电池管理控制器BMS端子分布及电路图 036 n 1.4.3 高压配电箱低压接插件针脚功能 040 n 1.4.4 前驱电动机控制器与DC-DC转换器电路 040 n 1.4.5 后驱电动机控制器电路图 044 n 1.5 比亚迪秦PHEV 046 n 1.5.1 BMS电池管理控制器端子检测 046 n 1.5.2 电池管理控制系统电路 048 n 1.5.3 电池管理系统故障代码 049 n 1.5.4 充电系统故障代码 053 n 1.5.5 车载充电电路 054 n 1.5.6 驱动电动机控制器端子检测 054 n 1.5.7 驱动电动机总成控制器与DC总成电路 056 n 1.5.8 驱动电动机与DC-DC转换系统故障码 056 n 1.5.9 驱动电动机控制系统故障代码 058 n 1.5.10 高压配电箱低压接插件端子检测 059 n
电动车控制器故障维修实用方法下篇
电动车控制器故障维修实用方法2电动车控制器这几年市场需求量不断增大,这几年也是赶上国家低碳环保的号召,让电动车产业迎来了一个发展的高峰,电动车控制器也成为这条产业链上重要的一个环节,这几年很多企业也做出了一些品牌。 最为人们熟知的就是高标控制器了,高标科技率先推出“第三代精细驱动控制技术”,引发行业变革。高标电子科技生产的控制器可以说是电动车控制器里的权威品牌,现在很多人对电动车控制器的维修问题有很多疑问,虽然说质量好的电动车控制器也不需要什么维修,但具备这些最基础的知识,也算给自己科普了一下。 一、影响控制器可靠性的因素: (一)、控制器的失效,从表现形式来看,有以下几种: 1、功率器件损坏;;2、控制器内部供电电源损坏;3、控制器工作时断时续;;4、连接线磨损及接插件不良或脱落引起控制信号丢失。 (二)、针对以上失效形式起因分析如下:? 1、功率器件的损坏,一般有以下几种可能:电机损坏引起的;功率器件本身的质量差或选用等级不够引起的;器件安装或振动松动引起的;电机过载引起的;功率器件驱动电路损坏或参数设计不合理引起的。 2、控制器内部电源的损坏,一般有以下几种可能:控制器内部电路短路;外围控制部件短路;外部引线短路。 3、控制器工作起来时断时续,一般有以下几种可能:器件本身在高温或低温环境下参数漂移;控制器总体设计功耗大导致某些器件局部温度过高而使器件本身进入保护状态;接触不良。 4、连接线磨损及接触插件接触不良或脱落,一般有以下几种可能:线材选择不合理;对线材的保护不完备;接插件的选型不好;线束与接插件的压接不牢.? 二、控制器故障与检修? 通过测量控制器连接部件或引线的电源电压或信号电压,可分析判断出控制器的故障所在.以下是控制器常见故障的检查与排除方法。 (一)、有刷控制器没有输出 先检查闸把输出信号的高、低电位,如果捏闸把时,闸把信号有超过4V的
电动自行车控制器电路及原理大全
电动自行车控制器电路及原理大全 目前流行的电动自行车、电动摩托车大都使用直流电机,对直流电机调速的控制器有很多种类。电动车控制器核心是脉宽调制(PWM)器,而一款完善的控制器,还应具有电瓶欠压保护、电机过流保护、刹车断电、电量显示等功能。 电动车控制器以功率大小可分为大功率、中功率、小功率三类。电动自行车使用小功率的,货运三轮车和电摩托要使用中功率和大功率的。从配合电机分,可分为有刷、无刷两大类。关于无刷控制器,受目前的技术和成本制约,损坏率较高。笔者认为,无刷控制器维修应以生产厂商为主。而应用较多的有刷控制器,是完全可以用同类控制器进行直接代换或维修的。 本文分别介绍国内部分具有代表性的电动自行车控制器整机电路,并指出与其他产品的不同之处及其特点。所列电路均是根据实物进行测绘所得,图中元件号为笔者所标。通过介绍具体实例,达到举一反三的目的。 1.有刷控制器实例 (1)山东某牌带电量显示有刷控制器 电路方框图见图1。 1)电路原理 电路原理图见图2所示,该控制器由稳压电源电路、PWM产生电路、电机驱动电路、蓄电池放电指示
电路、电机过流及蓄电池过放电保护电路等组成。 稳压电源由V3(TL431),Q3等元件组成,从36V蓄电池经过串联稳压后得到+12V电压,给控制电路供电,调节VR6可校准+12V电源。 PWM电路以脉宽调制器TL494为核心组成。R3、C4与内部电路产生振荡,频率大约为12kHz。 H是高变低型霍尔速度控制转把,由松开到旋紧时,其输出端可得到4V—1V的电压。该电压加到TL494的②脚,与①脚电压进行比较,在⑧脚得到调宽脉冲。②脚电压越低,⑧脚输出的调宽脉冲的低电平部分越宽,电机转速越高,电位器VR2用于零速调节,调节VR2使转把松开时电机停转再过一点。 电机驱动电路由Q1、Q2、Q4等元件组成。电机MOTOR为永磁直流有刷电机。TL494的⑧脚输出的调宽脉冲,经Q1反相放大驱动VDMOS管Q2。TL494的⑧脚输出的调宽脉冲低电平部分越宽,则Q2导通时间越长,电机转速越高。D1是电机续流二极管,防止Q2击穿。TL494的⑧脚输出低电平时,Q1、D2导通,Q4截止,Q2导通;TL494的⑧脚输出高电平时,Q1、D2截止,Q4导通,迅速将Q2栅极电荷泄放,加速Q2的截止过程,对降低Q2温度有十分重要的作用。 蓄电池放电指示电路由LM324组成四个比较器,12V由R24、VR1、VR4、VR3、VR5、R21分压形成四个不同基准电压分别加到四个比较器的反相端。蓄电池电压经R23和R22分压加到每个比较器的同相端,该电压和蓄电池电压成比例。V A=VB*R22/(R22+R23)。当蓄电池电压不低于38V时,LED1、LED2、LED3均点亮;当电池电压低于38V时,LED3熄灭;当电池电压低于35V时,LED2熄灭;当电池电压低于33V时,LED1熄灭,此时应给电池充电。调节VR1、VR4、VR3可分别设定LED3、LED2、LED1熄灭时的电压。LED4用作电源指示,LED5用作欠压切断控制器输出指示。 蓄电池过放电保护当蓄电池放电到31.5V时.LM324的①脚输出低电平,三极管Q5导通,约5V电压加到TL494的死区控制端④脚.该脚电位≥3.5V,就会迫使TL494内部调宽脉冲输出管截止,从而使三极管Q1、Q2截止,电机停止运转,蓄电池放电停止,进入电池保护状态。此时LED5点亮,指示出该状态。VR5用于设定电池保护点电压。 电机过流保护R30为电机电流取样电阻,当过流时,取样电压经R14加到TL494的⑩脚。当⑩脚电位高于⑩脚电位时,TL494内部运放2输出高电平,迫使TL494内部调宽脉冲输出管截止,从而使Q1、Q2截止,电机停止运转,从而保护了电机。 制动保护当刹车制动时,KEY2接通.5V电压加到TL494的死区控制端④脚,迫使TL494内部调宽脉
电动车维修技术培训班教材(清晰版)
电动车维修技术培训班教材 作者:朱明刚 第一章电动车的历史,现状及发展趋势 早期的电动自行车一般使用高速有齿电机配合汽车用启动型电池,调速装臵采用能耗型(电阻降压),由于调速装臵效率太低,没有相应的保护电路,使电机,调速装臵,电池之间的配合没有达到最佳状态。这种形式的电动自行车已经淘汰。 真正有实用价值的电动车在90年代后期出现,由于电动车电池(阀控密封铅酸蓄电池)技术有了突破性发展。可以在使用周期内达到免维护的目的。而且不再有电解液溢出,使用更加安全,方便。电动车得到快速发展。这一时期的电动车以高速有刷电机为主。控制器以pwm技术为核心,加入制动断电,过流保护,欠压保护。不仅保护电机不受大电流冲击,还能保护电池不会过放电,对电机和电池的寿命有了保障。同时,控制器功率管不再频繁烧毁。电动车整体性能得到质的飞跃。 2003年以后,电动车技术得到飞速发展,以无刷电机驱动的电动车逐渐代替故障率居高不下的有刷电动车。电机可靠性极高,使用寿命大大延长。与之相配的无刷控制器技术也得到快速提升。融入了多段限流软启动技术,速度开环,闭环控制,赌转保护,Abs柔性电子刹车技术,电机发电反充电技术,使电动车的机械和电气性能全面加强。
值得一提的是电池充电技术也不断提高,早期的工频变压器加上二极管充电机,由于没有充电电流,电压的控制。使电池严重过充或者欠充。电池使用寿命极短。后来研制了恒压限流2阶段充电器,虽然达到了充足电的要求,但效率较低,充电时间较长,现在普遍使用的智能3段式充电器,基本遵循了电池的最佳充电曲线(马斯曲线),在此基础上结合单片计算机技术,正脉冲充电,修复,和负脉冲去极化技术,数字化温度检测控制技术,电池充电量管理技术,电池组平衡充电技术。在充电的各个阶段施以最佳的电流,电压,频率,温度等控制。使充电时间更短,充电效率更高。电池寿命更长。 未来的电动车应该是以无位臵传感器(霍耳元件)的3相无刷电机为主流。由于省却了位臵传感器,电机结构更简单,可靠。电机只有3条绕组线。维护更简单。与之相配的无刷控制器技术含量更高。更换无刷换控制器将变得异常简单。 未来的电动车电池将会多元化发展,镍氢电池,锂电池,燃料电池,超级电容器电池等。但未来5-8年还是以铅酸电池为主。第二章电动车原理及维修 第一节电动车整体构造 电动车整体构造其实很简单,基本上是在自行车的基础上加上“四大件”(电池、控制器系统、电机、充电器),就成为一个简单的电动车。 由电池提供能源,通过控制器供给电机电能,电机把电能转换为
电动车控制器接线原理图
无刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁2.电机相位(u、v、w输出) 粗黄色线为U 粗绿色线为 V 粗蓝色线为W 3.转把信号输入 细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线4.电机霍耳(A、B、C输入) 细红色线为+5V电源细黑色线为接地线 细黄色线为 A 细绿色线为 B 细蓝色线为 C 5.刹车(柔性EABS+机械刹)细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V)细黑色线为接地线(低电平刹车) 6.传感器 细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入 7.仪表(转速):细紫色线 8.巡航:细棕色线 9.限速:细灰色线 10.自动识别开关线:细黄色线 PIC16F72智能型无刷电动车控制 器使用方法和注意事项 1、在接线前先切断电源,按接线 图所示连接各根导线; 2、该控制器应安装在通风、防 水、防震部位。 3、控制器限速控制插头应放置容 易操作的地方。 4、控制器接插件应接插到位,禁 止将控制器电源正负极反接(即严 禁粗红、细橙和粗黑;细红和细黑 接反)。 5、电机模式自动识别:正确接好 电动车控制器的电源、转把、刹把 等线束,,将电机识别模式开关线 (细黄)短接,打开电门锁,使电 机进入自动识别状态,若电机反转 则按一下刹车即可使电机正向转 动,在控制器识别电机模式10秒 后将电机识别模式开关线(细黄) 直接断开即可完成电机模式自动识 别。 6、1+1助力方向调整:在通电状 态,将调速电阻从最大值调到最小 值,再回到原始状态后,可将1+1 助力的方向从正向模式切换到反向 模式,再调整一次可从反向模式切 换到正向模式,并将最终的模式存 入单片机。 控制器线:红粗是正极,黑粗是负 极,红细是转把5V正极,黑细是 负极,绿色是信号线,你看看你的 转把线是不是没有接好,红细5V 正极和绿色是信号线两个相碰看看 电机转吗?如果转动就是转把线你 的转把黑线断了。 电动车控制器怎么接线 1,分清楚每根线的作用,给控制供电的电源线(一般三根线用一个朔料插销弄在一起,其中最粗的两根是给控制器供电的、红+级、黑的-级,还一根细的红色的是电源锁线)2,转把(控制速度的),一般是三根细线、红、蓝、黑。也是用朔料插销弄在一起的。3,仪表线、速度线、刹车断电线。一般仪表线和刹车断电线也是在一起的, 4,还有两个线,它们可以互 相连接在一起的,那可以调节 角度。(60度和120度) 5,三跟主相线,5跟细的 (和电机里面霍尔连接的) 再具体说下连接办法! 第一个,注意好正负极就可以 了! 第二个,需要调试不可能一次 成功的。(随便乱接) 第三个,需要根据经验找到, 先排除其他的线的作用,! 第四个,一般最后调试不出 来,就可以考虑是电机和控制 器角度问题了! 第五个,控制器和电机有严格 的匹配关系,需要慢慢调试。 哎,没有修过电动车肯定是接 不出来的,无刷的有点难度! 相信有刷的你可以搞定!还有 的就是控制器和电机就算型号 一样(假如都是48V300W) 也是有可能装上去没有作用
图解电动车电机拆卸换霍尔全解
图解电动车电机拆卸换霍尔无刷电机结构示意图:
1.将电机引出线的那一面螺丝全部拆下,找一块木板备用。电机盖最好做好盖和钢圈对应的原位置记号, 不然装上和原位置不对应,有的电机会扫膛的。
2.没拆螺丝那面向下,往木板上用力一敲,电机就脱离出来了。定子有磁性,用力轻的话,会被吸回去。
3.将盖拉出,方便换霍尔。转子线圈最好用软的东西垫着,如泡沫,布。不要把线圈上的铜线擦破皮 了。 4.用刀片将霍尔挖出并刮净槽中的胶质。涂入少量的AB胶,装入霍尔焊接。霍尔有字的为面,面向上,从左至右,1脚是正极,2脚是负极,3脚是信号输出。3个正极和3个负极各自并联,分别接红线和黑线,3根信号线分别接绿、蓝、黄线。通常三个有字的面朝上是60度角,中间那个面向下是120度角。有些电机则相反,具体可用修车宝检测角度。
5.检测电机霍尔好坏:将电机放在两凳上,用扳手固定轴心。接上霍尔插头,打开修车宝电源开关。稍微转一下电机即停,然后再转再停,如此循环,可看到第三行霍尔指示灯有序亮灭。如果一个或几个常亮或常灭,即可判断霍尔损坏。 电机霍尔角度检测:灯亮代表1,灯灭代表0。60度电机指示灯状态:100、110、111、011、001、000;120度电机:100、110、010、011、001、101。 从指示灯的亮灭情况可看到60度电机和120度电机的区别,就是60度电机有111和000两种状态,而120
度电机有010和101。因此,如果出现三个灯同时亮、同时灭的,这个电机就有可能是60度,否则为120度。 如果霍尔接错,也可能出现指示灯错乱而无法判断角度的情况,参考这个帖子:电动车换霍尔后用修车宝测不出电机相位角度是怎么回事?https://www.360docs.net/doc/855978943.html,/bbs/thread-327168-1-1.html
电动车控制器怎么判断好坏电动车控制器接线图介绍
电动车控制器怎么判断好坏电动车控制器接线图介绍 时间:2017/1/3 16:48:00 人气:4737 编辑:腾牛小编 分享到: 标签:电动车 导读:在日常生活中,很多人喜欢骑电动车出行。电动车的使用寿命与电动车的控制器有关,那么电动车控制器怎么判断好坏下面小编将为大家介绍电动车控制器接线图,希望对大家有帮助! 电动车是常用的交通工具,方便快捷。很多人喜欢使用,电动车的使用寿命与电动车的控制器有关。那么电动车控制器怎么判断好坏电动车控制器多少钱一只下面小编为大家介绍电动车控制器接线图,希望对大家有用!
仔细观察做工 一个控制器的做工体现一个公司实力,同等条件下,作坊控制器肯定不如大公司的产品;手工焊接的产品肯定不如波峰焊下来的产品;外观精致的控制器好过不注重外观的产品;导线用得粗的控制器好过导线偷工减料的控制器;散热器重的控制器好过散热器轻的控制器等等,在用料和工艺上有所追求的公司相对可信度高,对比就能看得出来。 对比温升 用新送来的控制器和原来使用的控制器进行同等条件下堵转发热试验,两个控制器都拆掉散热器,用一辆车,撑起脚,先转动转把达到最高速,立即刹车,不要刹死,免得控制器进入堵转保护,在极低速度下维持5秒钟,松开刹车,迅速达到最高速,再刹车,反复同样的操作,比如30次,检测散热器最高温度点。 拿两个控制器的数据对比,温度越低越好。试验条件应该保证相同的限流,相同的电池容量,同一辆车,同样从冷车开始测试,保持相同的刹车力度和时间。试验结束时应检查固定MOS的螺丝松紧程度,松得越多表明使用的绝缘塑料粒子耐温性越差,在长期使用中,这将导致MOS提前因发热而损坏。再装上散热器,重复上述试验,对比散热器温度,这可以考察控制器的散热设计。 观察反压控制能力 选取一辆车,功率可以大一点,拔掉电池,选用充电器为电动车供电,接上E-ABS使能端子,确保刹把开关接触良好。慢慢转动转把,太快了充电器无法输出很大的电流,会引起欠压,让电机达到最高速,快速刹车,反复多次,不应出现MOS损坏现象。在刹车时,充电器输出端的电压会快速上升,考验控制器的瞬间限压能力,此试验如果用电池测试基本没有效果。
电动车控制器原理图解
电动车控制器原理图解
单片机PICl6F72是目前电瓶车控制器主流控制芯片,配合2只 74HC27(3输入或非门电路);1只74HC04D(反相器);1只74HC08D(双输入与门)和一片LM358(双运放),组成一款比较典型的无刷电瓶车控制器,具有60°和120°驱动模式自动切换功能,其基本组成框图见图l。实物测绘原理图见图2(图中数据除注明外,均为开锁停车状态数据)。 一、电路简介与自检 开通电门锁,48V电瓶直流电经电门锁线输入到控制器,一路经R3、R13、R4等送入U6的③脚作电瓶欠压检测用,另一路送入U13、U14、
U15输出+15V和+5V给IC和末级驱动供电。单片机PICl6F72的⑨、⑩脚外接16MHz晶体,①脚外接R13、C25组成复位电路,电门锁开锁,单片机得电工作后即进入初始化自检状态,它主要检测:1.由R3、R73、R4、R11、C2l等组成的电池欠压检测电路(典型值U6的③脚输入3.8V)。 2.由R5、R6、U1等组成的末级电流检测和过流保护电路(正常值Ul的⑦脚输出0V,①脚输出约3.6V)。 3.转把复位信号(正常值U6的⑥脚输入约0.8V的低电平)。 4.刹车复位信号(正常值U6的⑦脚输入4.8V高电平)。 5.电机霍尔元件检测到的无刷电机相位信号(正常时至少有一根霍尔线输入为4.1V,其他为0V)。 自检后的状态由LED2显示结果,以下是参照值(具体显示与单片机的程序设计有关)。 闪l停l--自检正常通过 闪2停l--欠压 闪3停l--LM358故障 闪4停1--电机霍尔信号故障
闪5停l--下管故障 闪6停l--上管故障 闪7停1--过流保护 闪8停l--刹车保护 闪9停1--手把地线断开 闪10停1--手把信号和手把电源线短路 闪l停11--上电时手把信号未复位 若自检正常通过,当转动转把时,U6根据转把输出电压的大小,将相应脉冲宽度的载波信号与三路驱动上下管的换相导通信号混合,从而达到控制无刷电机速度的目的,不同的速度对应不同的电机电流,同时行驶速度与电机换相频率成正比。 电路中,末级功率管V1和V2,V3和V4分别为无刷电机U相的上、下路驱动管;V5和V6,V7和V8分别为无刷电机V相的上、下路驱动管;V9和V10,Vll和V12分别为无刷电机W相的上、下路驱动管。U2为下管驱动IC,U4为上管驱动IC;U3、U5为上、下管R55、R56(康铜丝)串接在末级功率管的地线上,因而末级功率管的电流变化会在R55、R56上产生压降,所以由R5、R6和Ul等组成的电流检测电路可以随时检测无刷电机电流的大小,避免过流损坏电机。由R3、R73、R4、R11、C21、
纯电动汽车整车控制器的设计
纯电动汽车整车控制器的设计 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。传 统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。纯电 动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。随着科 技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提 供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。本文 从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。 关键词:纯电动汽车;整车控制器;硬件设计;软件设计 纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能 量效率高等优点成为现代汽车的发展趋势。整车控制器(vehicle control unit,VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控 制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车 辆安全监控等功能。国外在纯电动汽车整车控制器的产品开发中,积极推行整车 控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展。虽然国内 各大汽车厂商基本掌握了整车控制器的设计方案,开发技术进步明显,但是对核 心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低。本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对 整车控制器的设计和开发展开研究。 一、整车控制系统分析与设计 (一)整车控制系统分析 复合电源纯电动汽车整车控制系统主要由整车控制器、能量管理系统、整车 通信网络以及车载信息显示系统等组成。首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行 驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统 发出操控命令,并接受各子控制器做出的反馈。 保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备。整车控制器实时地接收传感器传 输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实 时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节 点的整车通信网络,实现了数据快速、可靠的传递。 (二)整车控制系统设计 复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟 踪动力电池电压来调整超级电容电压,使两者电压相匹配。为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系 统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。 整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit,MCU)、电池管理系统(battery management system,BMS)、双向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit,ECU)组成 了复合电源纯电动汽车的整车通信网络。 二、整车控制器硬件设计及软件设计
电动车控制器维修.
一、电子元器件常识 1、电阻 贴片电阻一般分为2种: (1)3位数,普通型,误差5%,前2位为有效数值,第三位为0的个数,如:“103”为10000欧姆,即10K,“152”为1500欧姆,即1.5K。 (2)4位数,精密型,误差1%,前3位都为有效数值,第四位为0的个数,如“1502“为15000欧姆,“1511”为1510欧姆。 测试方法:将万用表档位切换到对应量程的欧姆档,将测试表笔连接到待测电阻上。 注意: (1)如果被测电阻值超出所选择量程的最大值,将显示过量程“1”,应选择更高的量程,对于大于1MΩ或更高的电阻,要几秒钟后读数才能稳定,这是正常的。将测试出的阻值与贴片电阻上标的值对比,即可判断电阻是否值变。 (2)当没有连接好时,例如开路情况,仪表显示为“1”。 2、三极管 PCB贴片板上的三极管有三种,即8550、8050、5551.将万用表档位切换到二极管档测试8550(Y2,Y6或HD)时,将黑表笔接触1脚,红表笔依次测试2、3脚的参数; 测试8050(Y1,Y5或HC)时,将红表笔放在1脚,黑表笔依次测试2、3脚的参数;
测试5551(G1)时,将红表笔放在1脚,黑表笔依次测试2、3脚的参数。 测试A1013时,将黑表笔接触3脚,红表笔依次测试1、2脚的参数; 测试MPSA56时,将黑表笔接触2脚,红表笔依次测试1、3脚的参数; 3、直插电解电容标识和含义 (1)电解电容标识的含义:以63V/1000uF为例,63V是电容的耐压值,1000uF是电容的容量。 (2)正负极的判断:在灰色的部分一般有两条矩形框,那么挨着这个灰色部分最近的引脚就是负极了。 检修实例: 1、故障现象:电机不转,加电转动转把,电机有发沉的感觉,过一会电机转动轻松。
电动汽车整车控制器功能结构说明
新能源汽车整车控制器系统结构 和功能说明书 新能源汽车作为一种绿色的运输工具在环保、节能以及驾驶性能等方面具有诸多内燃机汽车无法比拟的优点,其是由多个子系统构成的一个复杂系统,主要包括电池、电机、制动等动力系统以及其它附件(如图1所示)。各子系统几乎都通过自己的控制单元(ECU)来完成各自功能和目标。为了满足整车动力性、经济性、安全性和舒适性的目标,一方面必须具有智能化的人车交互接口,另一方面,各系统还必须彼此协作,优化匹配,这项任务需要由控制系统中的整车控制器来完成。基于总线的分布式控制网络是使众多子系统实现协同控制的理想途径。由于CAN总线具有造价低廉、传输速率高、安全性可靠性高、纠错能力强和实时性好等优点,己广泛应用于中、低价位汽车的实时分布式控制网络。随着越来越多的汽车制造厂家采用CAN协议,CAN逐渐成为通用标准。采用总线网络可大大减少各设备间的连接信号线束,并提高系统监控水平。另外,在不减少其可靠性前提下,可以很方便地增加新的控制单元,拓展网络系统功能。 新能源汽车控制系统硬件框架 整车控制器电机控制器仪表ECU电池管理系统车载充电机MCU 外围 电路信号 调理 电路功率 驱动 电路电源 电路通讯 电路
图1新能源汽车控制系统硬件框架 一、整车控制器控制系统结构 公司自行设计开发的新能源汽车整车控制器包括微控制器、模拟量输入和输出、开关量调理、继电器驱动、高速CAN总线接口、电源等模块。整车控制器对新能源汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。该整车控制器采集司机驾驶信号,通过CAN总线获得电机和电池系统的相关信息,进行分析和运算,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动回馈控制。该整车控制器还具有综合仪表接口功能,可显示整车状态信息;具备完善的故障诊断和处理功能;具有整车网关及网络管理功能。 其结构原理如图2所示。 电源模块 CAN 加速踏板传感器 制动踏板传感器模 拟 量 调 理微 控 制 器光 电
无刷电动车控制器接线方法
无刷电动车控制器接线方法
无刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁 2.电机相位(u、v、w输出)
粗黄色线为U 粗绿色线为V 粗蓝色线为W 3.转把信号输入 细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线 4.电机霍耳(A、B、C输入) 细红色线为+5V电源细黑色线为接地线 细黄色线为 A 细绿色线为 B 细蓝色线为 C 5.刹车(柔性EABS+机械刹) 细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V)细黑色线为接地线(低电平刹车) 6.传感器 细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入7.仪表(转速):细紫色线 8.巡航:细棕色线 9.限速:细灰色线 10.自动识别开关线:细黄色线 PIC16F72智能型无刷电动车控制器使用方法和注意事项 1、在接线前先切断电源,按接线图所示连接各根导线; 2、该控制器应安装在通风、防水、防震部位。 3、控制器限速控制插头应放置容易操作的地方。 4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。 5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后将电机识别模式开关线(细黄)直接断开即可完成电机模式自动识别。 6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机。 更多关于电动车维修请点击下面的链接 电动车整车电气原理图 电动机车故障维修手册 电动车检测仪制作 电动车综合检测仪制作 电动车故障维修资料 电动车三合一喇叭接线图 电动车电机霍尔更换图解 电动车维修 电动车维修技术 电动车故障维修 无刷电机相角的判断 无刷电机的接线方法 电动车报警器(防盗器)的接法