三坐标测量机综合误差测量不确定度
坐标测量机示值误差校准结果的测量不确定度评定

标 测量 机 与 量块 线 膨胀 系数 之差 小 于 1 0 % 且 服从 U形
分布 : 则: 3 2 = 0 . 1 1 5 A/  ̄= 0 . 0 8 1 / z m ( 6 )
Байду номын сангаас
计 算得 到 实验标 准偏 差
收 稿 日期 : 2 0 1 7— 0 7—1 0
雩红 英 : 坐标 测 量 机 示值 误 差 校 准 结 果 的测 量 不确 定 度 评 定
量 块 的实 际长度 值 , 单位 m m。
2 . 2 经分析 , 测量结果 的不确定度 的来源主要有 : 测量 重 复性 、 量块 长 度 、 测 量温 度 、 量 块 的线膨 胀 系数 。
3 标 准不确 定 度评 定
0 . 2  ̄ C= 0 . 2 3 m, 且 u形分 布 :
D OI : 1 0 . 1 5 9 8 8 / j . c n k i . 1 0 0 4— 6 9 4 1 . 2 0 1 7 . 0 8 . 0 2 0
Un c e r t a i n t y Ev a l u a t i o n o f Ca l i b r a t i o n Re s u l t o f Co o r d i n a t e
则: Ⅱ 3 1 = 0 . 2 3 / ] 2 = 0 . 1 6 1 m
确定 度 u 3 2
( 5 )
3 . 3 . 2 坐标 测量 机 与 量块 线 膨 胀 系数 差 引 入 的标 准 不 校准时温度 对 2 0 ℃ 的最 大偏差 为 1 q I = , 半 宽 0=
1 1 . 5× 1 0 一 ℃一 ×1 0 0 m m ×1 ℃ ×1 0 % =0 . 1 1 5 , 假 定 坐
基于GPS的三坐标测量机不确定度评定
基于 G P S的 三 坐 标 测 量 机 不 确 定 度 评 定
杨 桥 徐 磊 姜 瑞
( 合肥工业大学仪器科学与光电工程 学院 , 安徽 合肥 2 3 0 0 0 9 )
摘
要: 三坐标测 机足一个广 ‘ 泛应 用的儿何量测量仪器 , 准确评价其测量结果的不确定皮 , 对 于提升测量结果的可用性具 有重要意 义。本文基于产 品几
操作 规 范 的前 提下 , 由各 测量者 自行拟 定测 量策 略 , 不 同 测 量者 的测量 是相互 独立 的。 即每 个测 量者 均 须根 据 自
C MM) , 作 为一 种通用 的精 密 测量 仪 器 , 广 泛 地 应 用 于机 床、 模具 、 汽车、 航 空航 天 等众 多加工 制造 领域 , 是现代 产 品几 何量 检 测 中最重要 的手段 之一 。然 而 目前 的商 用三 坐标 测量 机 在应 用 时 , 通 常 只给 出、 狈 4 量结 果 的估 计值 , 而 无法 获得 测 量结 果 的不确 定度 。测 量不确 定度 反应 了测 量结 果 的可 信程 度 , 是 测量 结果 中必 须包 含 的部 分 , 缺少
*基 金 项 目 : 国 家 自然 科 学 基 金 资 助 项 目 ( N o . 5 1 2 7 5 1 4 8 ) 收 稿 日期 : 2 0 1 4—0 4—0 8
《 钟 童与潮试 技术》 2 。 ’ 4羊 第4 /卷 第 9期
Th r e e Co o r d i na t e Me a s u r i n g Ma c h i n e Ba s e d o n GPS Ev a l u a t i o n o f Un c e r t a i n t y
三坐标测量机示值误差测量结果的不确定度评定
通过计算结果估 计 :
k=2 参 考 文 献 【 ] ] J J F 1 0 6 4 — 2 0 1 0 , 坐标 测 量 机校 准规 范. [ 2 ] J J F 1 0 5 9 . 1 — 2 0 1 2 , 测量不确定度评定 与表示 U一( 0 . 1 3 + 4 / 5 L ) m
— — — — — 一
u ( e r ) = 、 Y / 去 J J ∑( iR / 1 . 6 9 ) = 0 . 0 2 X I m
=
1
4不 确 定 度 一 览 表 ( 表 4)
( E ) =√ ( P f ) +U 2 ( P 口 ) +R 2 ( P f ) - t - U 2 ( ) +U 2 ( P w ) +U 2 ( P , )
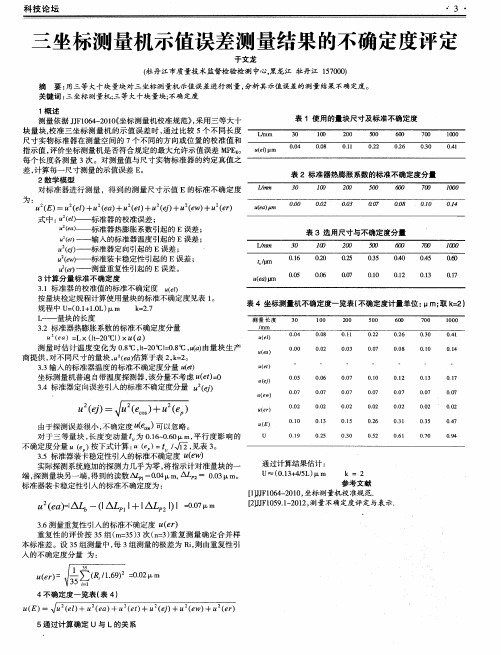
1 概 述
测量依据 J J F 1 0 6 4 — 2 0 1 0 ( ( 坐标测量机校准规范》 , 采用三等 大十 块量 块, 校准 三坐标测 量机 的示值 误差 时 , 通过 比较 5个不 同长度 尺寸 实物标准 器在测量空 间的 7个不 同的方 向或 位置 的校 准值 和 指示值 , 评价坐标测量机是 否符合规定 的最大允许示值误 差 MP E 。 每个 长度各测量 3次 。对测 量值与尺 寸实物标准 器 的约定 真值之 差, 计算 每一尺寸测量的示值误差 E 。
8 2 ( 口 ) = I △ 一( 1 A 1 l +l A 2 1 ) l= o . 0 7 x I m
3 . 6测量 重复性引入的标准不确定度 u( 已 r ) 重复 性的评价 按 3 5组 ( m = 3 5 ) 3次( n = 3 ) 重复 测量确定 合并样 本标准差 。设 3 5组测 量中 , 每 3组测量 的极差为 R i , 则 由重复性引 入的不确定度分量 为 :
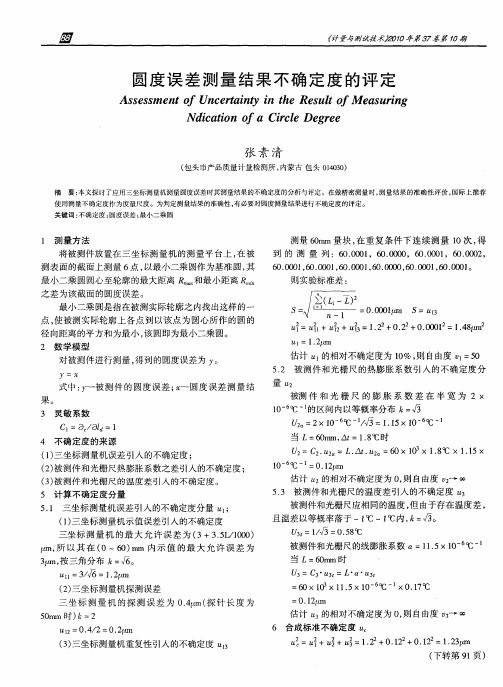
圆度误差测量结果不确定度的评定
估 计 u 的相对不确 定 度为 1% , 自由度 1 5 】 0 则 =0
52 被测件和光栅尺的热膨胀系数引入的不确定度分 .
量 2
式 中 : 一 被 测 件 的 圆度 误 差 ; 圆度 误 差 测 量 结 y 一
果。
3 灵敏 系数
Cl a = /O1 d:1
被测 件 和 光 栅 尺 的 膨 胀 系 数 差 在 半 宽 为 2× 1 I℃ 的区间 内以等概率 分布 = 06
() 3 三坐标 测量 机重复 性引入 的不确定 度 u 坞
{ /+M=12+ . 2 01 = . ta +/ ; . 01 + . 12 m , ! 2 2 2 3
( 下转第 9 页 ) l
石俊杰 等: 高效液掘 色谱 法铡定小麦粉 中过氧 化苯甲酰
的过氧化苯 甲酰标准 溶液 1 [1, 1 . 方 法处理 , .)L 按 . 1 0【 1 3 进行 加标 回收率测 定 , 果见 表 2 结 。平 均 回收率 为 9 .%, S 80 R D
为 34 .%。
表 1 8份 样 品 精 密 度试 验 结 果 ( n=6 )
表 2 6份 样 品 准确 度试 验 结 果 ( n=6 )
参 考 文 献
[] B 70—2 I. 1G 26 ( '食品添加 剂使用卫生标准 . XI [] 2 中华 人 民共 和 国 国家 标 准 . 品 卫 生检 验 方 法 理 化部 分 . B 食 G/
被测 件和光栅 尺应相 同的温 度 , 由于存 在温 度差 , 但 且 温差 以等概率 落于 一l o , 。 C~1C内 后= o U / 3 .8 3=14 =0 5 ℃
被测 件和光栅 尺 的线 膨胀 系数 a:1 . ×1 ℃ - 15 0 1
三坐标角度示值的不确定度评定报告(47BQD-01-2017)
测 量 不 确 定 度 报 告47BQD-01-20171目的为了验证产品角度尺寸与设计值的符合性,需要对产品的角度尺寸进行测量,三坐标测量机测量分辨率高是一种有效的测量设备。
根据JJF1059.1-2012《测量不确定度评定与表示》对三坐标测量机的角度测量进行测量不确定度评定。
2依据GB/T3177-2009 产品几何技术规范(GPS)光滑工件尺寸的检验 3适用范围用单一材料或层积材料制成的有一定刚性的产品,产品尺寸在设备测量范围以内。
4方法概要采用三坐标测量机对任意工件(本例中采用二级角度40°量块)在标准环境(温度20±2℃,湿度<65%)中,进行测量,在直角坐标系空间的有效量程上,记录三坐标测量机示值,各机器平面测量三次,得到9组读数,将读数作为测量结果。
5数学模型由测量的方式,建立数学模型如下:(采用40°的量块)i i T M = (i =1,2…9)式中:i M ——测量结果,i T ——三坐标测量机的读数 6使用的计量器具、标准物质和仪器设备① 三坐标测量机,该设备的分辨率为0.5μm ,假定三角分布,k =61/2 ② 三坐标测量机,该设备的校准证书指出最大允许示值误差(MPE E )为 8.0+7.5L/1000 (μm ) ,在本例中L ≤70mm ,得MPE E =8.525μm ,假定均匀分布,k =31/2;③ 三坐标测量机,该设备的校准证书指出最大允许探测误差(MPE P )为8.0μm,假定均匀分布,k=31/2。
④三坐标测量机,该设备说明中设备轴间垂直度允差为0.0005°,假定为均匀分布,k=31/2。
7测量结果M及典型值用40°角度量块进行9次测量结果如下:XY面YZ面ZX面读数1 读数2 读数3 读数4 读数5 读数6 读数7 读数8 读数9 40.0014 39.9987 40.0025 39.9995 40.0009 39.9971 39.9988 39.9980 39.9991 平均值: 39.9996°8不确定度分量的识别、分析和量化按照数学模型及方法概要,其不确定度来源有5方面:① M的测量重复性u1 (M)(8.1)②三坐标测量机的分辨率引入的标准不确定度u2 (M)(8.2)③三坐标测量机的最大允许示值误差引入的标准不确定度u3 (M)(8.3)④三坐标测量机的最大允许探测误差引入的标准不确定度u4(M)(8.4)⑤三坐标测量机的轴间垂直度允差引入的标准不确定度u(M) (8.5)58.1 测量重复性u1(M)用40°角度量块进行9次测量重复性,贝塞尔公式计算单次测量标准差s(M)=[∑M i2/(n-1)]1/2= 0.001726°u1(M)=s(M)/ 91/2= 0.0005754°8.2 设备的分辨率引入的标准不确定度u2(M)考虑设备在根据测点构造矢量时,因设备的示值误差±0.5μm会发生角度偏差,在L=70的长度内,设测点间距为60mm,角误差即为±0.0009549°,双矢量则为:±0.001910°,假定为三角分布,k=61/2,u2(M)=0.001910°/61/2=0.0007797°8.3 设备的最大允许示值误差引入的标准不确定度u3(M)设备的最大允许示值误差是MPE E=8.525μm, 同样在L=70的长度内,设测点间距为60mm,角误差即为:0.01628°,双矢量则为:0.03256°,假定均匀分布,k=31/2u3(M)=0.03256°/31/2=0.01880°8.4设备的最大允许探测误差引入的标准不确定度u4(M)设备的最大允许探测误差是MPE P =8μm, 同样在L=70的长度内,设测点间距为60mm,角误差即为:0.01528°,双矢量则为:0.03056°,假定均匀分布,k=31/2U4(M)=0.03056°/31/2=0.01764°8.5设备的轴间垂直度允差为0.0005°,考虑到有三轴存在,彼此无明显相关性,则合成允差为:(0.00052+0.00052+0.00052)1/2=0.0008660°假定为均匀分布,k=31/2U5(M)=0.0008660°/31/2=0.0005°9计算相对合成标准不确定度u cr(M)符号来源类别量值量序U1(M) 测量重复性A类0.0005754° 1U2(M)设备分辨率B类0.0007797° 2U3(M) 设备示值误差B类0.01880° 3U4(M) 设备探测误差B类0.01764° 4U5(M)垂直度允差B类0.0005° 5u c(M)=[∑u i2(M)]1/2=(0.0005752+0.00077972+0.018802+0.017642+0.00052)1/2=0.02581°10计算扩展不确定U(M)取k=2,U(M)=2×u c(M)=2×0.02581°=0.05162°11结果完整表达该量块的测量结果M=39.9996°U(M)=0.05162°, k=2编制人审核人批准人日期日期日期。
三坐标测量机校准规范

1
2
3
4
5
6
7
699.9993 499.9990 400.0004 199.9999 30.0005 499.9994 400.0024 300.0008 200.0014 30.0003 499.9981 399.9993 299.9978 199.9991 30.0007 700.0007 499.9986 400.0002 200.0003 30.0009 699.9999 499.9976 400.0002 199.9998 30.0010 700.0026 499.9987 400.0003 200.0001 29.9993 700.0012 499.9990 400.0022 200.0015 30.0012
结果处理:用25个测量值计算出最小二乘球中心,求出25个测点到球心的距离R,P=RMAX-RMIN
综合性评定:探测误差P不大于最大允许探测误差MPEP,允许重复再测一次。
检测报告实例:
» ì ² à ¼ µ ¸ û
» ² ì à º Ö Î Ã Á ¾ ¾ é Ã û Ò å Ö µ mm
700 500 400 200 30 500 400 300 200 30 500 400 300 200 30 700 500 400 200 30 700 500 400 200 30 700 500 400 200 30 700 500 400 200 30
二、六项国际标准
• • • • • ISO/TR 10360—1:1994 《坐标计量学—第1部分:定义,基本几何原则的 应用》 ISO/10360—2:1994 《坐标计量学—第2部分:坐标测量机(CMM)的性 能评定》 ISO/DIS 10360—3:1994 《坐标计量学—第3部分:回转轴为第四坐标的 坐标测量机的性能评定》 ISO/CD 10360—4:1995 《坐标计量学—第4部分:扫描型坐标测量机的性 能评定》 ISO/CD 10360—5:1995 《坐标计量学—第5部分:具有复合多测头探测系 统坐标测量机的性能评定》 ISO/CD 10360—6:1995 《坐标计量学—第6部分:坐标测量几何要素评定 软件的检验一致性》
三坐标误差原因分析

三坐标误差原因分析发布时间:2010-07-30注:三坐标误差分析本人摘自网络,感谢作者!时间:2010年7月30日三坐标误差分析,将产生原因归纳为测量方法误差、三坐标测量机设备误差、测量环境误差、测量人员误差、被测工件本身误差五个方面。
并指出要减少三坐标测量机测量误差,最大限度地发挥三坐标测量机能力,必须是三坐标测量机制造厂与用户之间密切配合,共同努力才能达到。
三坐标测量机虽然测量精度较普通量具测量准确得多,但必定存在测量误差。
因此,为了使三坐标测量机的测量结果最大限度地满足机械设计、制造、检验的需要,必须分析三坐标测量机测量误差产生的原因。
本文将三坐标测量机测量误差的原因归纳为测量方法误差、三坐标测量机设备误差、测量环境误差、测量人员误差和被测工件本身误差五个方面。
下面分别进行研究。
测量方法误差及解决措施三坐标测量机用于零件和部件的尺寸误差和形位误差的测量,特别对于形位误差测量更显示其高准确度、高效率、测量范围大的优点。
而形位误差的测量方法种类非常多,GB1958—80《形状和位置公差检测规定》中规定了形位误差有五种检测原则:与理想要素比较原则、测量坐标值原则、测量特征参数原则、测量跳动原则、控制实效原则。
并且还列出了100余种测量方法。
如果在测量形位误差时采用的检测原则不对,选用的方法不完善、不严密、不确切,便会造成测量方法误差。
因此,从事三坐标测量机工作的人,一定要熟悉测量方法,特别是对形位误差的五种检测原则和100余种测量方法要非常熟悉,才能减少测量方法误差。
三坐标测量机设备误差及解决措施任何一种三坐标测量机均存在误差,根据国标GB/T16857.2-1997(等效国际标准ISO10360—2-----1994)规定,将三坐标测量机的误差归纳为长度测量的示值误差E和探测误差R二类。
其中三坐标测量机长度测量的示值误差E是指用三坐标测量机测量长度实物标准器的两标称平行平面间的法向(与一个面正交)两相对点距离的示值误差,即测得长度与长度实物标准器长度真值之差,以微米计算,并以下列三个表达式的任一式表示:E=A+L/K≤BE=A+L/KE=B式中:A------常数项,由三坐标测量机制造厂提供,μm;L------被测长度,mm;K------无量纲常数,由三坐标测量机制造厂提供;B------E的最大值,由三坐标测量机制造厂提供,μm。
三坐标测量机误差补偿

综合误差补偿
综合硬件和软件补偿
结合硬件和软件补偿方法,通过调整 机械结构、光学元件和优化软件算法 等手段,实现更全面、有效的误差补 偿。
多轴联动误差补偿
针对多轴联动测量机,通过分析各轴 之间的耦合误差,采用多轴联动误差 补偿方法,以提高多轴联动测量的精 度和可靠性。
03 误差补偿实施步骤
误差测量
电气元件误差
测量机的控制系统中的电气元件 ,如传感器、编码器等,由于其 制造和装配过程中存在的误差, 会影响测量机的测量精度。
测量机安装误差
安装水平度误差
测量机在安装过程中,如果工作台面 不水平,会导致测量机在运动过程中 产生误差。
安装位置误差
测量机的安装位置应符合设计要求, 否则会影响测量机的测量范围和精度 。
03
基于机器视觉的误差补偿技术
利用机器视觉技术对测量机进行误差补偿,提高测量精度和效率。
人工智能在误差补偿中的应用
深度学习在误差补偿中的应用
01
通过训练大量数据,建立深度学习模型,对测量结果
进行自动修正。
强化学习在误差补偿中的应用
02 通过强化学习算法,自动调整测量机的参数,以减小
误差。
智能优化算法在误差补偿中的应用
重复性标准差
比较误差补偿前后的重复性标准差, 以量化评估误差补偿的效果。
稳定性分析
分析测量数据的分布情况,判断误 差补偿后测量机的稳定性是否提高。
比较测试
比较测试
将误差补偿后的三坐标测量机与更高精度的测量设备进行比较测 量,以评估误差补偿的效果。
测量数据对比
对比两种设备的测量数据,分析误差补偿后三坐标测量机的测量精 度是否接近或达到更高精度的测量设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标测量机长度测量示值误差不确定度分析
1 测量方法
依据坐标测量机校准技术规范JJF1064-2000, 坐标测量机的长度测量示值误差是采用量块进行校准, 一般要沿X 轴、Y 轴、Z 轴三个方向和空间四个对角线方向放置量块。
将量块的实际长度与坐标测量机所测的结果进行比较,从而得到坐标测量机的长度测量示值误差。
由于坐标测量机测量空间不同点的测量不确定度不同,不同的测量方案对测量结果的不确定度也有不同的影响,本文讨论坐标测量机自动测量沿空间对角线放置量块的不确定度,并以标称长度为100 mm 和1000 mm 的量块为例估算不确定度,最后得到与标称长度L 有关的扩展不确定度。
2 数学模型
δ=R -L (1)
式中:
δ──坐标测量机的长度测量示值误差; R ──坐标测量机测量量块的读数; L ──对应的量块实际长度。
3 方差和灵敏系数 依:
)(][)(222
k k m
1
k c x u x f/y u ∂∂=∑=
由式(1)有
)()()()()(222222L u L C R u R C u u c c ⋅+⋅=δ=
式中
C (R )=R ∂δ∂/=1
C(L)=L ∂δ∂/-1
则 )()(222
L u R u u c += (2)
由长度测量示值误差的数学模型,根据不确定度的传播公式得到长度测量示值误差的标准不确定度是由坐标测量机读数引起不确定度分量u (R )和量块引起不确定度分量u (L )两大部分组成。
4 不确定度的来源及估算
4.1 坐标测量机读数引起不确定度分量u (R )
坐标测量机读数引起不确定度主要是坐标测量机的测量重复性。
为了获得测量机沿空间测量的重复性,可将长度为20 mm 的量块沿空间对角线放置,编制测量机检测编程,让测量机自动重复测量该量块10次,得到一组测量误差 x 1,x 2,…,x 10如下表1,按式(3)得到实验标准偏差s, 则u (R )可由式(4)求得。
表1
测序 1 2 3 4 5 6 7 8 9 10 误差(μm ) +1.0 +1.3 +1.4 +1.3 +1.6 +1.6 +1.6 +1.4 +1.5 +1.3
19.0)101(91101101
2
=-=∑∑==i i i
i x x s μm (3)
u (R )= s (4)
4.2 量块引起不确定度分量u (L )
4.2.1 由检定量块不确定度引入的不确定度分量u (L 1)
首先要根据被校准的坐标测量机最大允许示值误差 MPE E 选择采用量块的等级, 一般来说检定量块不确定度应不超过(MPE E /4)。
假设采用三等量块校准坐标测量机,量块的检定证书给出其中心长度的扩展不确定度为(0.1+1.0L )μm (L 为量块的标称长度,单位 m,下同), 置信概率p =0.99,覆盖因子k 1=2.58,检定量块不确定度引入的不确定度分量u (L 1)按下式估算
u (L 1)=(0.1+1.0L )/ k 1 (5)
4.2.2 由量块长度变动量引入的不确定度分量u (L 2)
根据量块的检定规程JJG146-1994对量块长度变动量的定义,如果某一标称长度量块的长度变动量的允许值为∆,量块变动量误差可按半宽为∆/2 的均匀分布处理, k 2=3,则量块长度变动量引入的不确定度分量u (L 2)可按下式估算
u (L 2)= (∆/2)/ k 2 (6)
4.2.3 由检定量块长度稳定性引入的不确定度分量u (L 3)
根据量块的检定规程JJG146-1994,量块的长度稳定性为(0.05+1.0L )μm ,服从均匀分布k 3=3,量块长度稳定性引入的不确定度分量u (L 3) 可按下式估算
u (L 3)=(0.05+1.0L )/ k 3 (7)
4.2.4 环境温度偏离20℃引入的不确定度u (L 4)
坐标测量机工作环境的温度条件对其测量不确定度有较大的影响,为保证测量准确度环境温度的控制应满足测量机的出厂要求。
假设实际校准时环境温度的波动不超过0.5℃/h ,可只考虑温度偏离20℃对测量不确定度的影响,如温度控制在20℃±1℃,则温度偏离的变化范围为(-1℃~+1℃),被校准的坐标机采用钢带光栅, 其材料热膨胀系数与量块热膨胀系数的差值为∆α=2⨯10-6/℃ ,校准前量块与测量机已充分等温,不考虑量块与测量机存在温度差对测量不确定度的影响,将温度偏离按半宽 △t =1℃ 区间成均匀分布处理,温度偏离引入的不确定度u (L 4)可估算如下
u (L 4)=△α×L ×106 ×△t /3
= 2×10-6 ×L ×106×1/3=1.155L μm (8) 对于有些能自动检测工件温度而进行温度修正的坐标测量机,温度引入的不确定度则在于温度检测系统的测温不确定度,估算时应将式(8)中△t 换成测温不确定度。
合成以上四项, 将式(5)~式(8)代入式(9)可得到量块引起不确定度分量u (L )
2/142322212)]()()()([)(L u L u L u L u L u +++= (9)
5 合成标准不确定度和扩展不确定度
将式(4)和式(9)代入式(2)得到合成的标准不确定度 c u 如下,
2/122322212})155.1(]/)0.105.0[(]/)2/[(]/)0.11.0[({L k L k k L s u c +++∆+++= (10) 采用标称长度 L =100 mm 的量块校准坐标测量机时, 将量块长度变动量 ∆=0.2μm 和测量重复性s 代入式(10) 计算得到标准不确定度c u (100)=0.26μm ; 对于L =1000 mm ,同样可得到标准不确定度 c u (1000)=1.40μm 。
通过c u (100)和c u (1000) 确定标准不确定度值c u 与量块标称长度 L 的关系式如下:
c u =(0.13+13L /10000) μm (L 单位为mm )
取包含因子k =2, 则扩展不确定度: U =(0.26+26L /10000) μm (环境温度为 20℃±1℃) 从以讨论的是沿坐标测量机空间对角线放置量块的测量不确定度,按同样的步骤也可分析沿轴向放置量块的测量不确定度,校准坐标测量机长度测量示值误差的扩展不确定度与校准采用的量块、测量重复性及环境温度有密切的关系,具体计算时要根据选定的量块等级、实际的测量重复性和温度偏离影响量代入,估算的不确定度才能反映实际情况。
当测量机10次测量的重复性 s 分别0.2 μm ,0.5μm ,1.0μm 时,不同尺寸的量块,在不同的温度偏离情况下,计算的扩展不确定度见下表2,表3,表4。
表2 重复性 s=0.2 μm ,扩展不确定度U 包含因子k=2 单位 μm
表3 重复性s=0.5 μm,扩展不确定度U 包含因子k=2 单位μm
表4 重复性s=1.0 μm,扩展不确定度U 包含因子k=2 单位μm。