基于单片机的工业顺序控制系统设计
基于单片机的全自动洗衣机控制系统毕业设计论文

基于单片机的全自动洗衣机控制系统毕业设计论文基于单片机的洗衣机控制系统设计摘要单片机是计算机家庭的一个重要分支,它具有体积小、价格低、面向控制的特点,适用于各种工业控制、仪器仪表装置,在人类生产和生活的各个领域都有极为广泛应用。
本洗衣机控制系统,采用目前常用的89C51单片机,用汇编语言的编程方法,完成对洗衣机洗衣全过程的自动控制,并采用LED数码显示洗衣过程代码和洗衣剩余时间,洗衣完成后能自动报警。
使全自动洗衣机的使用更加简单、直观和方便。
本设计取材容易,结构简洁,易于制作,具有一定的实用价值。
关键字:单片机、汇编语言、动态扫描目录绪论1.1 设计目标1.2 设计意义第二章硬件和软件的设计方法 2.1 洗衣机的工作过程2.2 全自动洗衣机控制系统硬件的选择 2.3 单片机编程软件的选用第二章全自动洗衣机控制系统的设计原理 3.1 控制系统方框图3.2 控制板电路原理(附整机原理图) 3.3 控制功能及过程第四章洗衣机控制系统的软件系统4.1 洗衣机控制系统软件的编程思路 4.2 主程序及子程序流程图 4.2 洗衣机控制系统的源程序参考文献附录 AT89C51技术手册MCS-51系列单片机指令系统表第一章第一章:绪论在生产和生活的各个领域中,凡是有自动控制要求的地方都会有单片机的出现。
单片机的应用有利于产品的小型化、多功能化和智能化,而且抗干扰能力强,可在各种恶劣的环境下可靠地工作,成本也较低。
所以单片机的应用已极为广泛,它在工业自动化、工业测控、智能仪器仪表、家用电器、信息与通信、军事装备等方面都在发挥着“微电脑控制”的作用。
1.1 设计目标用51系列单片机89C51控制全自动洗衣机的运行,使其能自动地完成进水、洗涤、漂洗、脱水等功能。
不同的衣物,洗涤、漂洗、脱水和洗衣电机正反转所用的时间不同,要求设计能够实现过程选择,并在LED显示屏上显示过程代码。
在运行的时候能显示完成整个过程的剩余时间。
MCS-51单片机在注塑过程中的顺序控制
MCS -51单片机在注塑过程中的顺序控制夏晓玲(鄂州大学 机电工程系, 湖北 鄂州 436000)摘要:该文介绍了运用MCS -51单片机及其接口,实现对注塑过程中的顺序控制,针对控制中的实际问题,进行状态检测和显示,对于故障现象给出声、光提示和报警,并作出抗干扰设计,保证系统可靠稳定运行。
关键词:单片机;接口;顺序控制;抗干扰设计 中图分类号:TP271+2文献标识码:A 文章编号:1008-9004(2004)04-0031-03 一、引言微型计算机是大规模集成电路技术发展的产物,由于实际应用的需要,它正向着两个不同的方向发展:一个是向高速度、大容量、高性能的高档微机方向发展,另一个则是向稳定可靠、体积小和价格廉的单片机方向发展。
单片机因其将中央处理器(CPU )、随机存储器(RAM )、只读存储器(ROM )、中断系统、定时/计数器以及I/O 口集成在一块芯片上而得名[1]。
单片机主要应用于控制领域,用以实现各种测试和控制功能。
在工业控制中,像冲压、注塑、制瓶、轻纺等生产过程都是一些连续生产过程,按某种顺序有规律地完成预定的动作,对这类继续生产过程的控制称作顺序控制。
注塑机工艺过程大致分为“合模———注塑———延时———开模———产伸———产退几个顺序动作。
本文基于以上情况用MCS —51单片机对注塑机工艺过程实行控制,具体介绍了控制原理与组成,单片机及接口电路,控制方框流程图,系统软件设计,以及实际运行情况等。
二、控制原理及组成据2004年《中国教育技术装备》,本系统由以下几部分组成:1、单片机;2、I/O 接口;3、电气控制;4、给定及显示;5、状态检测及显示打印;6、故障检测及声光报警;7、抗干扰电路;8、系统工作软件。
键盘输入给定、相应参数设置,充分利用单片机及接口电路,实现运行过程中的各项控制,声、光报警,显示和打印等。
在系统设计中考虑了多项故障保护和检测:过电压保护、欠电压保护、过电流保护、光电隔离等。
单片机实验 工业顺序控制
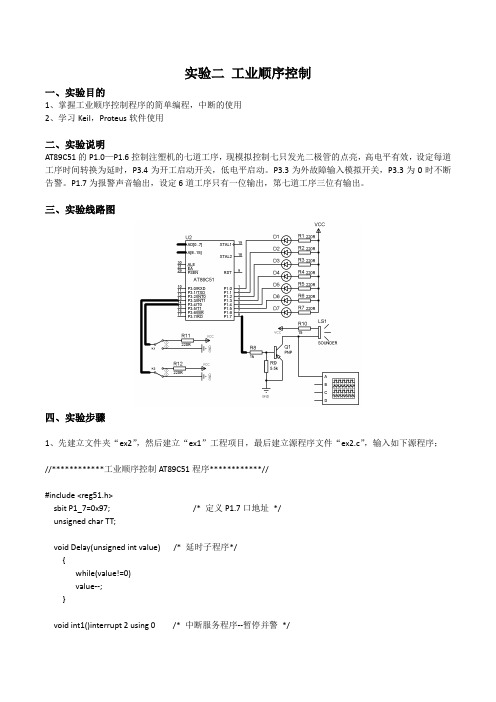
二、实验说明
AT89C51的P1.0—P1.6控制注塑机的七道工序,现模拟控制七只发光二极管的点亮,高电平有效,设定每道工序时间转换为延时,P3.4为开工启动开关,低电平启动。P3.3为外故障输入模拟开关,P3.3为0时不断告警。P1.7为报警声音输出,设定6道工序只有一位输出,第七道工序三位有输出。
1)P3.4连K1,P3.3连K2,P1.0-P1.6分别连到L1-L7, P1.7连电子音响SOUND输入端;
2)K1开关拨在下面,K2拨在上面;
3)K1拨在下面(显低电平),各道工序应正常进行;
4)K2拨在下面(显低电平),应有声音报警(人为设置故障),可从虚拟示波器观察SOUND信号变换情况;
P1=0x7f; /*关输出*/
while(!INT1) /*若故障未消除,则报警*/
{ for(i=0;i<0xa0;i++) /*给蜂鸣器发震Leabharlann 脉冲*/{ P1_7=1;
Delay(50);
P1_7=0;
Delay(50);
}
P1_7=0;
Delay(6550);
}
P1=TT; /*恢复现场*/
unsigned char TT;
void Delay(unsigned int value) /*延时子程序*/
{
while(value!=0)
value--;
}
void int1()interrupt 2 using 0 /*中断服务程序--暂停并警*/
{
int i;
TT=P1; /*保护现场*/
}
void main (void)
{
基于单片机的电梯控制系统_毕业设计(论文))

毕业设计(论文)题目基于单片机的电梯控制系统模拟电梯控制系统设计摘要单片机即单片微型计算机(Single-Chip Microcomputer ),是集CPU ,RAM ,ROM ,定时,计数和多种接口于一体的微控制器。
其中51单片机是各种单片机中最为典型和最有代表性的一种,广泛应用于各个领域.电梯是集机械原理应用、电气控制技术、微处理器技术、系统工程学等多学科和技术分支于一体的机电设备,它是建筑中的永久垂直交通工具。
本论文选择AT89S51为核心控制元件,设计了一个八层电梯系统,使用单片机汇编语言进行编程,实现运送乘客到任意楼层,并且显示电梯的楼层和上下行。
利用单片机控制电梯有成本低,通用性强,灵活性大及易于实现复杂控制等优点。
关键词单片机电梯系统控制Simulated elevator control system designAbstract Microcontroller that microcomputer (Single-Chip Microcomputer) gathering CPU, RAM, ROM, the timing, number and variety of interface integrated microcontrollers. 51 various SCM SCM is the most typical and most representative of a widely used in various fields. Elevator is the application of the principle set machinery, electrical control technology, microprocessor technology, systems engineering and other technical disciplines and branches of the integration of mechanical and electrical equipment, which is building a permanent vertical transport. This paper choice AT89S51 control of the core components, designed a new 8 storey lift systems, using single-chip assembly language programming, transporting passengers arrived a floor, it also shows the elevator floor and downlink. SCM control elevators low cost, versatility, flexibility and ease of large complex control advantagesKeyboards Single-Chip Microcomputer Elevator system control目录引言 (1)第一章单片机概述 (2)1.1单片机简介 (2)1.2单片机的特点 (3)1.3单片机的应用领域 (4)1.4单片机的发展趋势 (4)1.5单片机的主要生产厂家和机型 (5)第二章硬件系统实现 (7)2.1功能模块图 (7)2.2各功能模块介绍 (7)2.2.1 AT89S51芯片 (7)2.2.2 显示模块 (10)2.2.3 复位开关模块 (10)2.2.4 振荡器电路模块 (11)2.2.5 程序下载模块 (11)2.3设计电路及连线 (11)第三章软件设计 (13)3.1汇编语言简介 (13)3.2流程图设计 (14)3.3程序设计 (15)3.3.1程序初始化 (15)3.3.2主程序调用 (15)3.3.3中断程序调用 (16)第四章系统调试 (19)4.1硬件调试 (19)4.2软件调试 (19)第五章英文翻译 (21)结论 (25)致谢 (26)参考文献 (27)程序附录 (28)引言随着现代高科技的发展,住房和办公用楼都已经逐渐向高层发展。
单片机控制系统

汇报人: 2024-01-04
目录
• 单片机控制系统概述 • 单片机硬件系统 • 单片机软件系统 • 单片机控制系统设计与实现 • 单片机控制系统案例分析
01
单片机控制系统概述
单片机的定义与特点
定义
单片机是一种集成电路芯片,内部集 成了计算机的基本电路,包括中央处 理器、存储器、输入输出接口等。
抗干扰设计
采取措施降低系统受到的电磁干扰,提高系 统的稳定性和可靠性。
系统软件设计
程序流程设计
根据需求设计合理的程序流程 ,包括主程序、中断服务程序
、子程序等。
算法设计
为实现系统功能,设计合适的 算法,提高系统的数据处理能 力和控制精度。
数据结构设计
合理规划系统中的数据结构, 便于数据的存储、传输和处理 。
冗余技术
通过重复执行关键代码或数据来提高软件的可靠性。
软件陷阱技术
当程序跑飞时,通过软件陷阱将其引导至复位地址。
数字滤波技术
通过多种算法对采集到的数据进行滤波处理,去除噪声干扰。
04
单片机控制系统设计与实 现
系统需求分析
功能需求
明确系统需要实现的具体功能,如数据采集 、控制输出、通信等。
性能需求
特点
单片机体积小、重量轻、功耗低,可 靠性高,价格便宜,易于开发,广泛 应用于各种控制系统中。
单片机控制系统的应用领域
01
02
03
04
智能家居
用于控制家电设备,实现智能 化管理。
工业自动化
用于控制生产设备,实现自动 化生产。
智能仪表
用于测量和控制各种物理量, 如温度、压力、流量等。
医疗设备
用于控制和监测医疗设备,如 监护仪、呼吸机等。
基于单片机的工业顺序控制系统设计
基于单片机的工业顺序控制系统设计【设计题目】基于单片机的工业顺序控制系统设计【设计要求】在工业控制过程,如冲压、注塑、轻纺、制瓶等生产过程,都是一些断续生产过程,按某种程序有规律地完成预定的动作,对这类断续生产过程的控制称顺序控制,例如注塑机工艺过程大致按“合模→注射→延时→开模→产伸→产退”顺序动作,用单片机最容易实现这类过程的控制。
要求如下:(1)单片机的P1.0—P1.6模拟控制注塑机的七道工序,通过缓冲器74LS240控制七只发光二极管的点亮,P1口输出高电平有效信号,经74LS240反向后驱动发光二极管(VL1~VL7),按VL1~VL7顺序先后分别亮1~7秒,依次循环。
(2)P3.3用作外故障输入模拟端口,再P3.3口送“0”时,能不断发出告警,P1.7口作为报警声音输出,经功放驱动扬声器。
故障排除时,程序应从刚才报警的那道工序继续执行。
【设计过程】1.【方案设计】硬件:单片机可以实现时序控制、时间控制等,用单片机可以构成形式多样的控制系统、数据采集系统,因此选择单片机作为控制芯片。
软件:单片机晶振为12MHZ,一个单指令周期为12个机器周期,以此写出延时1~7秒的汇编程序。
单片机74LS240 LED图-1系统框图2.【器件选择】8031单片机、74LS240、9012晶体管、数码管、扬声器图-2 74LS240管脚图74LS240是一种芯片,对发光二极管起缓冲反相器的作用。
图-3 8031管脚图下面按其引脚功能分为四部分叙述这40条引脚的功能。
1)、主电源引脚VCC和VSSVCC——(40脚)接+5V电压;VSS——(20脚)接地。
2)、外接晶体引脚XTAL1和XTAL2XTAL1(19脚)接外部晶体的一个引脚。
在单片机内部,它是一个反相放大器的输入端,这个放大器构成了片内振荡器。
当采用外部振荡器时,对HMOS单片机,此引脚应接地;对CHMOS单片机,此引脚作为驱动端。
XTAL2(18脚)接外晶体的另一端。
基于行程开关控制的顺序电路设计正文
目录1 设计依据 (1)1.1课题意义 (1)1.2背景现状及特点 (1)1.3 设计电路的方案 (2)2 电气控制系统设计的要求 (2)2.1 电气控制系统设计的基本原则 (2)2.2 电气控制系统设计的其他要求 (4)3 电气原理图的绘制原则 (5)3.1 原理图的组成部分: (5)3.2 绘制电气原理图的要求 (5)4 设计思路及过程 (6)4.1 主电路的设计 (6)4.2 控制电路 (7)5 设计电路原理图和工作流程 (10)5.1 电路原理图 (10)5.2 线路的综合审查及工作流程 (11)6 元件列表及元件简介 (12)6.1顺序控制电路电器元件明细表 (12)6.2 时间继电器 (14)6.3交流接触器 (15)6.4 热继电器 (16)6.5 行程开关 (18)7 电器元件布置图 (18)7.1 电器元件布置图的绘制原则 (19)7.2 电器元件布置图的绘制 (19)8 电气安装接线图的设计 (20)8.1 电气安装接线图的绘制原则 (20)8.2 电气安装接线图 (21)9 顺序控制系统的安装 (22)9.1 安装与调试的基本要求 (22)9.2 检查电器元件 (22)9.3 安装的准备工作 (23)9.4 安全注意 (24)10结论 (24)参考文献 (26)致谢 (27)附录 (28)1 设计依据1.1课题意义行程开关是位置开关(又称限位开关)的一种,是一种常用的小电流主令电器。
利用生产机械运动部件的碰撞使其触头动作来实现接通或分断控制电路,达到一定的控制目的。
通常,这类开关被用来限制机械运动的位置或行程,使运动机械按一定位置或行程自动停止、反向运动、变速运动或自动往返运动等。
所谓顺序控制(Sequential Controller)就是指使“生产机械的动作( 或工作内容) 按事先规定好的时间函数或逻辑顺序进行工作的控制方式。
就是使生产机械或生产过程中各执行机构按规定的时序而顺序动作,或在现场输入信号作用下,按预定规律而顺序动作的自动控制。
C51单片机课件 5第五章顺序控制系统
5.2 89C51单片机定时器/计数器
2、中断方式参考源程序:
#include <reg51.h>
sbit P1_0=P1^0; void timer0( ) interrupt 1
{ TH0=0x15;
TL0=0xa0; P1_0=~P1_0; }
void main ( void ) { P1=0xff; TMOD=0X01; TH0=0x15; TL0=0xa0; TR0=1; EA=1; ET0=1; While (1); }
六、顺序控制系统所涉及的知识点
(1)定时/计数器的概念。 (2)89C51单片机中定时/计数器的应用。 (3)C51定时/计数器中断服务程序的设计与应用。
5.2 89C51单片机定时器/计数器
定时和计数功能最终都是通过计数实现的,若计数的事件源是
周期固定的脉冲,则可以实现定时功能,否则只能实现计数功 能。因此可以将定时和计数功能由一个部件实现。
图5-4 定时器/计数器结构框图
5.2 89C51单片机定时器/计数器
2、计数方式:外部输入信号的下降沿触发计数,计数器 在每个时钟周期或时钟周期的12分频采样外部输入信号, 若一个周期的采样值为1,下一个周期的采样值为0,则 计数器加1,故识别一个从1到0的跳变需2个周期,所以,
单片机对外部输入信号最高的计数速率是时钟频率的
实现定时和计数的方法一般有软件、专用硬件电路和可编程定
时器/计数器三种方法。
采用软件只能定时,且占用CPU时间,降低了CPU的使用效率。
专用硬件电路可实现精确的定时和计数,但参数调节不便。
可编程定时器/计数器,不占用CPU时间,能与CPU并行工作, 实现精确的定时和计数,又可以通过编程设置其工作方式和 其它参数,因此使用方便。
单片机步进电动机控制系统设计
前言单片机是一个单芯片形态、面向控制对象的嵌入式应用计算机系统。
它的出现及发展使计算机技术从通用型数值计算领域进入到智能化的控制领域。
从此,计算机技术在两个重要领域——通用计算机领域和嵌入式计算机领域都得到了极其重要的发展,并正在深深地改变着我们的社会。
采用8031单片机控制步进电机,可实现步进电动机正反转控制和步进电动机的无级调速。
分析了步进电机的工作原理,讨论了系统硬件和软件的设计方法,并给出了步进电机的四相八拍单片机控制的具体实现方法.该系统操作简单,降低了成本,提高了系统的可靠性.步进电机具有控制方便和体积小等特点,因此在智能仪表和位置控制中得到了广泛的应用。
近年来大规模集成电路的发展以及各种单片机的迅速发展和普及,为设计功能强、价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
步进电动机是一种将电脉冲信号转换成相应角位移或线位移的电动机,它的运行需要专门的驱动电源,驱动电源的输出受外部的脉冲信号控制。
每一个脉冲信号可使步进电机旋转一个固定的角度,这个角度称为步距角。
脉冲的数量决定了旋转的总角度,脉冲的频率决定了电动机旋转的速度,改变绕组的通电顺序可以改变电机旋转的方向。
在数字控制系统中,它既可以用作驱动电动机,也可以用作伺服电动机。
它在工业过程控制中得到广泛的应用,尤其在智能仪表和需要精确定位的场合应用更为广泛。
1 单片机的基本知识1。
1 概述单片微型计算机简称单片机,由于它的结构及功能均是按工业控制要求设计的,所以其确切的名称应是单片微控制器(Single Chip Microcontroller)。
它是把微型机算计的各个功能部件:中央处理器CPU、随机存储器RAM、只读存储器ROM、并行I/O接口、定时器/计数器及串行通信接口等集成在一块芯片上,构成一个完整的微型计算机系统,故又把它称为单片微型计算机系统(Single Chip Microcomputer)。
由于单片机面对的是测控对象,突出的是控制功能,所以它从功能和形态上来说都是应控制领域应用的要求而诞生的。
毕业设计-基于C51单片机的步进电机控制系统设计
摘要本设计中首先介绍了步进电机的工作原理、控制特点和运行状态,然后给出了步进电机的单片机控制系统的总体设计方案。
在这个控制系统中,单片机选用AT89C51,其作为控制核心,担负着产生脉冲,发送、接受控制命令等任务;脉冲分配采用硬件方法,由8713接收到单片机的控制信号后产生相应的控制脉冲,避免了软件法在不停地产生脉冲时占用的时间;采用单电压驱动的方法驱动电机带动负载运行;利用键盘、显示专用芯片8279能够以较简单的硬件电路和较少的软件开销实现微型机与键盘和LED显示器接口。
本设计最后详细介绍了硬件部分和软件部分的实现方法。
关键词:单片机;步进电机;速度控制;ZLG7290;显示器AbstractThe design introduces the working principle of stepper motor, control features and operations, and then gives the stepper motor microcontroller control system design programs. In this control system, the SCM selecting AT89C51, the control center of the shoulder produces pulses, sending, receiving control commands and other tasks; pulse distribution method using hardware from the 8713 chip control signals received resulting from the corresponding control pulse, to avoid software method to generate pulses in constant time occupied; adopt a single voltage-driven approach drive motor to drive the load operation; use of keyboard, display 8279 can be dedicated to simple hardware and less software overhead to achieve keyboard and LED display interface. Finally introduce the hardware and software implementation methods in detail.Key words: SCM; stepper motor; speed control;ZLG7290;display;目录摘要 (I)Abstract .................................................... I I 第一章绪论. (1)1.1步进电机概述 (1)1.2课题研究的主要内容 (2)1.2.1研究内容 (2)1.2.2论文安排 (2)第二章步进电机控制系统设计方案 (3)2.1步进电机的系统 (3)2.2步进电机的失步现象 (5)2.3步进电机控制系统的组成 (6)2.4系统的控制过程 (7)第三章步进电机控制系统硬件部分 (9)3.1硬件电路图 (9)3.2采用51系列单片机AT89C51作为控制器 (10)3.2.1 AT89C51的主要性能 (10)3.2.2 AT89C51引脚功能说明 (10)3.3步进电机的驱动电路 (15)3.4 LED显示电路 (16)3.4.1 LED显示器的结构原理 (16)3.4.2 LED显示接口 (18)3.5可编程键盘/显示控制器ZLG7290电路工作原理 (19)3.5.1 ZLG7290概述 (19)3.5.2管脚、引线与功能 (21)3.5.3 ZLG7290键盘、显示接口电路设计 (24)3.6脉冲分配 (26)第四章步进电机控制系统软件部分 (30)4.1定时器中断服务 (30)4.1.1定时器初值 (30)4.1.2定时器中断服务子程序 (31)4.2 速度控制 (31)第五章总结 (35)致谢 (36)参考文献 (37)附录 (38)第一章绪论本章将简要介绍步进电机的发展过程、步进电机在日常生活中的广泛应用、步进电机作为数字控制电动机的主要特点以及本次研究的主要内容和论文安排。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的工业顺序控制系统设计【设计题目】基于单片机的工业顺序控制系统设计【设计要求】在工业控制过程,如冲压、注塑、轻纺、制瓶等生产过程,都是一些断续生产过程,按某种程序有规律地完成预定的动作,对这类断续生产过程的控制称顺序控制,例如注塑机工艺过程大致按“合模→注射→延时→开模→产伸→产退”顺序动作,用单片机最容易实现这类过程的控制。
要求如下:(1)单片机的P1.0—P1.6模拟控制注塑机的七道工序,通过缓冲器74LS240控制七只发光二极管的点亮,P1口输出高电平有效信号,经74LS240反向后驱动发光二极管(VL1~VL7),按VL1~VL7顺序先后分别亮1~7秒,依次循环。
(2)P3.3用作外故障输入模拟端口,再P3.3口送“0”时,能不断发出告警,P1.7口作为报警声音输出,经功放驱动扬声器。
故障排除时,程序应从刚才报警的那道工序继续执行。
【设计过程】1.【方案设计】硬件:单片机可以实现时序控制、时间控制等,用单片机可以构成形式多样的控制系统、数据采集系统,因此选择单片机作为控制芯片。
软件:单片机晶振为12MHZ,一个单指令周期为12个机器周期,以此写出延时1~7秒的汇编程序。
图-1系统框图2.【器件选择】8031单片机、74LS240、9012晶体管、数码管、扬声器图-2 74LS240管脚图74LS240是一种芯片,对发光二极管起缓冲反相器的作用。
图-3 8031管脚图下面按其引脚功能分为四部分叙述这40条引脚的功能。
1)、主电源引脚VCC和VSSVCC——(40脚)接+5V电压;VSS——(20脚)接地。
2)、外接晶体引脚XTAL1和XTAL2XTAL1(19脚)接外部晶体的一个引脚。
在单片机内部,它是一个反相放大器的输入端,这个放大器构成了片内振荡器。
当采用外部振荡器时,对HMOS单片机,此引脚应接地;对CHMOS单片机,此引脚作为驱动端。
XTAL2(18脚)接外晶体的另一端。
在单片机内部,接至上述振荡器的反相放大器的输出端。
采用外部振荡器时,对HMOS单片机,该引脚接外部振荡器的信号,即把外部振荡器的信号直接接到内部时钟发生器的输入端;对XHMOS,此引脚应悬浮。
3)、控制或与其它电源复用引脚RST/VPD、ALE/PROG、PSEN和EA/VPP①RST/VPD(9脚)当振荡器运行时,在此脚上出现两个机器周期的高电平将使单片机复位。
推荐在此引脚与VSS引脚之间连接一个约8.2k的下拉电阻,与VCC 引脚之间连接一个约10μF的电容,以保证可靠地复位。
VCC掉电期间,此引脚可接上备用电源,以保证内部RAM的数据不丢失。
当VCC 主电源下掉到低于规定的电平,而VPD在其规定的电压范围(5±0.5V)内,VPD 就向内部RAM提供备用电源。
②ALE/PROG(30脚):当访问外部存贮器时,ALE(允许地址锁存)的输出用于锁存地址的低位字节。
即使不访问外部存储器,ALE端仍以不变的频率周期性地出现正脉冲信号,此频率为振荡器频率的1/6。
因此,它可用作对外输出的时钟,或用于定时目的。
然而要注意的是,每当访问外部数据存储器时,将跳过一个ALE脉冲。
ALE端可以驱动(吸收或输出电流)8个LS型的TTL输入电路。
对于EPROM单片机(如8751),在EPROM编程期间,此引脚用于输入编程脉冲(PROG)。
③PSEN(29脚):此脚的输出是外部程序存储器的读选通信号。
在从外部程序存储器取指令(或常数)期间,每个机器周期两次PSEN有效。
但在此期间,每当访问外部数据存储器时,这两次有效的PSEN信号将不出现。
PSEN同样可以驱动(吸收或输出)8个LS型的TTL输入。
④EA/VPP(引脚):当EA端保持高电平时,访问内部程序存储器,但在PC(程序计数器)值超过0FFFH(对851/8751/80C51)或1FFFH(对8052)时,将自动转向执行外部程序存储器内的程序。
当EA保持低电平时,则只访问外部程序存储器,不管是否有内部程序存储器。
对于常用的8031来说,无内部程序存储器,所以EA脚必须常接地,这样才能只选择外部程序存储器。
对于EPROM型的单片机(如8751),在EPROM编程期间,此引脚也用于施加21V 的编程电源(VPP)。
4)、输入/输出(I/O)引脚P0、P1、P2、P3(共32根)①P0口(39脚至32脚):是双向8位三态I/O口,在外接存储器时,与地址总线的低8位及数据总线复用,能以吸收电流的方式驱动8个LS型的TTL负载。
②P1口(1脚至8脚):是准双向8位I/O口。
由于这种接口输出没有高阻状态,输入也不能锁存,故不是真正的双向I/O口。
P1口能驱动(吸收或输出电流)4个LS型的TTL负载。
对8052、8032,P1.0引脚的第二功能为T2定时/计数器的外部输入,P1.1引脚的第二功能为T2EX捕捉、重装触发,即T2的外部控制端。
对EPROM编程和程序验证时,它接收低8位地址。
③P2口(21脚至28脚):是准双向8位I/O口。
在访问外部存储器时,它可以作为扩展电路高8位地址总线送出高8位地址。
在对EPROM编程和程序验证期间,它接收高8位地址。
P2可以驱动(吸收或输出电流)4个LS型的TTL负载。
④P3口(10脚至17脚):是准双向8位I/O口,在MCS-51中,这8个引脚还用于专门功能,是复用双功能口。
P3能驱动(吸收或输出电流)4个LS型的TTL 负载。
作为第一功能使用时,就作为普通I/O口用,功能和操作方法与P1口相同。
作为第二功能使用时,各引脚的定义如表所示。
值得强调的是,P3口的每一条引脚均可独立定义为第一功能的输入输出或第二功能。
表 P3各口线的第二功能定义口线引脚第二功能P3.0 10 RXD(串行输入口)P3.1 11 TXD(串行输出口)P3.2 12 INT0(外部中断0)P3.3 13 INT1(外部中断1)P3.4 14 T0(定时器0外部输入)P3.5 15 T1(定时器1外部输入) P3.6 16 WR (外部数据存储器写脉冲) P3.7 17 RD (外部数据存储器读脉冲)3.【软件设计】 1).实验流程图图-3 程序框图2).实验源程序ORG 0013HLJMP HA2S3ORG 0580HHA2S: MOV P1,#07FHORL P3,#00HHA2S1: JNB P3.4,HA2S1ORL IE,#84H主程序:中断服务子程序:ORL IP,#04HMOV PSW,#00HMOV SP,#53H HA2S2: MOV P1,#01HACALL DELAY1MOV P1,#02HACALL DELAY2MOV P1,#04HACALL DELAY3MOV P1,#08HACALL DELAY4MOV P1,#10HACALL DELAY5MOV P1,#20HACALL DELAY6MOV P1,#40HACALL DELAY7SJMP HA2S2HA2S3: MOV B,R2HA2S4: MOV P1,#07FHMOV 20H,#0A0H HA2S5: SETB P1.7ACALL HA2S6CLR P1.7ACALL HA2S6DJNZ 20H,HA2S5CLR P1.7ACALL HA2S6JNB P3.2,HA2S4MOV R2,BRETIHA2S6: MOV R2,#10D0:MOV R5,#125 D1:MOV R6,#2D2:DJNZ R6,D2DJNZ R5,D1DJNZ R4,D0RETDELAY1:MOV R4,#20D10:MOV R5,#125D11:MOV R6,#200D12:DJNZ R6,#D12DJNZ R5,D11DJNZ R4,D10RETDELAY2: MOV R4,#40D20:MOV R5,#125D21:MOV R6,#200D22:DJNZ R6,D22DJNZ R5,D21 DJNZ R4,D20RETDELAY3: MOV R4,#60D30:MOV R5,#125D31:MOV R6,#200D32:DJNZ R6,D32DJNZ R5,D31 DJNZ R4,D30RETDELAY4: MOV R4,#80 D40:MOV R5,#125 D41:MOV R6,#200 D42:DJNZ R6,D42 DJNZ R5,D41 DJNZ R4,D40 RETDELAY5: MOV R4,#100 D50:MOV R5,#125 D51:MOV R6,#200 D52:DJNZ R6,D52 DJNZ R5,D51 DJNZ R4,D50 RETDELAY6: MOV R4,#120 D60:MOV R5,#125 D61:MOV R6,#200 D62:DJNZ R6,D62 DJNZ R5,D61 DJNZ R4,D60 RETDELAY7: MOV R4,#140 D70:MOV R5,#125 D71:MOV R6,#200 D72:DJNZ R6,D72 DJNZ R5,D71 DJNZ R4,D70 RETEND【安装调试】1、P3.4连K1,P3.3连K2,P1.0—P1.6分别连到L1—L7,P1.7连SIN(电子音响输入端)。
2、K1开关拨在上面,K2拨在上面。
3、用连续方式从起始地址0580H开始运行程序(输入0580后按EXEC键),此时应在等待开工状态。
4、K1拨至下面(显低电平),各道工序应正常运行。
5、K2拨至下面(低电平),应有声音报警(人为设置故障)。
6、K2拨至上面(高电平),即排除故障,程序应从刚才报警的那道工序继续执行。
【电路安装】图-4 系统电路图【系统调试】调试环境(仪器)DVCC实验箱,计算机,导线若干。
调试方法按图连接好线路,K1拨至下面(显低电平),各道工序应正常运行,可以看到VL1~VL7依次按照1~7秒分别亮起后熄灭,循环反复。
若K2拨至下面(低电平),应有声音报警(人为设置故障)。
K2拨至上面(高电平),即排除故障,程序应从刚才报警的那道工序继续,则设计实验成功。
【结果分析】实验中延时的时间的计算为:DELAY1t=20*125*200*12*2/12000000=1S;分别代表的含义为:20、125、200是循环的次数相乘,12代表一个指令周期为12个机器周期,2代表该指令周期为双指令周期,12000000表示晶振的频率,也是机器周期。
在实验中可以观察到VL1~VL7依次按照1~7秒间隔循环亮起。
在故障出现时能够保护现场,待故障消除后从现场又开始循环。
【设计总结】经过将近一周的单片机课程设计,终于完成了工业顺序控制的设计,本次设计过程,真的让我长进了很多,单片机课程设计重点就在于软件算法的设计,需要有很巧妙的程序算法,此次在软件上是花费时间最多的,我们上网找资料,上图书馆,尽可能的了解有关于工业顺序控制这方面的知识。