天线线列阵方向图
阵列天线方向图的初步研究

通信信号处理实验报告——阵列天线方向图的初步研究 11级通信(研) 刘晓娟一、实验原理:1、智能天线的基本概念:智能天线是一种阵列天线,它通过调节各阵元信号的加权幅度和相位来改变阵列的方向图形状,即自适应或以预制方式控制波束幅度、指向和零点位置,使波束总是指向期望方向,而零点指向干扰方向,实现波束随着用户走,从而提高天线的增益,节省发射功率。
智能天线系统主要由①天线阵列部分;②模/数或数/模转换部分;③波束形成网络部分组成。
本次实验着重讨论天线阵列部分。
2、智能天线的工作原理:智能天线的基本思想是:天线以多个高增益的动态窄波束分别跟踪多个期望信号,来自窄波束以外的信号被抑制。
3、方向图的概念:以入射角为横坐标,对应的智能天线输出增益为纵坐标所作的图称为方向图,智能天线的方向图有主瓣、副瓣等,相比其他天线的方向图,智能天线通常有较窄的主瓣,较灵活的主、副瓣大小、位置关系,和较大的天线增益。
与固定天线相比最大的区别是:不同的全职通常对应不同的方向图,我们可以通过改变权值来选择合适的方向图,即天线模式。
方向图一般分为两类:一类是静态方向图,即不考虑信号的方向,由阵列的输出直接相加得到;另一类是带指向的方向,这类方向图需要考虑信号的指向,通过控制加权相位来实现。
二、实验目的:1、设计一个均匀线阵,给出λ(波长),N (天线个数),d (阵元间距),画出方向图曲线,计算3dB 带宽。
2、通过控制变量法讨论λ,N ,d 对方向图曲线的影响。
3、分析旁瓣相对主瓣衰减的程度(即幅度比)。
三、实验内容:1、公式推导与整理:权矢量12(,,......)T N ωωωω=,本实验旨在讨论静态方向图,所以此处选择ω=(1,1,......1)T 。
信号源矢量(1)()[1,,...]j j N T a e e ββθ---=,2sin dπβθλ=,幅度方向图函数()()HF a θωθ==(1)1sin2sin 2Nj n n N eβββ--==∑=sin(sin /)sin(sin /)n d n d πθλπθλ。
8.4 方向性与方向图,8.5 线天线与天线阵

微波接力通信
km
图 8.5.6 视距与天线高度的关系
图 8.5.7 微波接力示意图
d = (h1 + R) 2 − R 2 + (h2 + R) 2 − R 2 ≈ 2 Rh1 + 2 Rh2
当 h 1 = h 2 = h 时, d ≈ 226
h km
图 8.5.8 通信卫星
图 8.5.9 同步卫星建立全球通信
有关, 有关。 F(θ ,φ)中不仅与θ 有关,还与振子天线长度 l 有关。不同长度的 天线有不同的方向性。 天线有不同的方向性。 称为半波天线, 对称振子全长为 2 l = λ ,称为半波天线,辐射方程为
2
60 I & Eθ = j r
cos(
cosθ ) 2 e − jβ r sin θπ半波天线辐射功 Nhomakorabea及辐射电阻为
例8.1
有一天线长度为 ∆l = 3m ,电流有效值为 I = 35A ,工作频率
图8.5.1 开路传输线张开成对称振子
辐射电场的推导 轴放置,振子中心位于坐标原点, 设直线振子沿 z 轴放置,振子中心位于坐标原点,则 振子上的电流分布相量表达式为
P z
R
& I ( z ′) = I sin β (l − z ′ )
& 在z 处取一元电流段 I dz ′ ,则 & & = jZ Id z ′ sin θ e − jβ R d Eθ 0 2λ R
cos(
jα
式中m是两 。式中 是两
电流的振幅比, 是两电流的相位差。 电流的振幅比, α 是两电流的相位差。
π
60 I1 & Eθ 1 = j r1 2 sinθ cosθ ) e - jβ
阵列的方向图
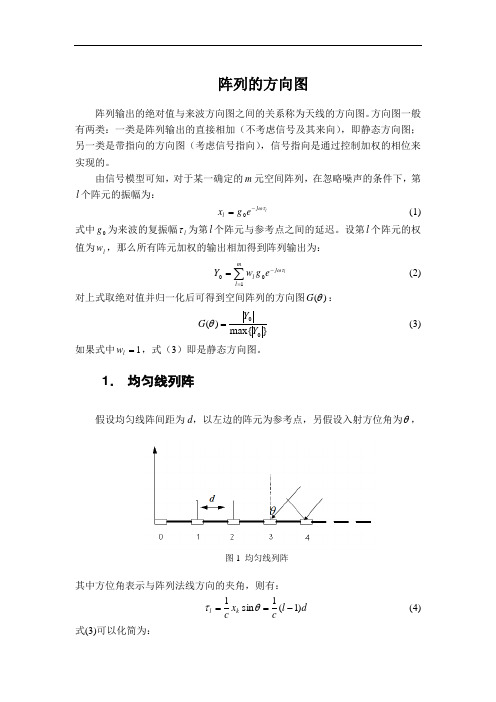
阵列的方向图阵列输出的绝对值与来波方向图之间的关系称为天线的方向图。
方向图一般有两类:一类是阵列输出的直接相加(不考虑信号及其来向),即静态方向图;另一类是带指向的方向图(考虑信号指向),信号指向是通过控制加权的相位来实现的。
由信号模型可知,对于某一确定的m 元空间阵列,在忽略噪声的条件下,第l 个阵元的振幅为:l j l e g x ωτ-=0 (1)式中0g 为来波的复振幅l τ为第l 个阵元与参考点之间的延迟。
设第l 个阵元的权值为l w ,那么所有阵元加权的输出相加得到阵列输出为:∑=-=ml j l l e g w Y 100ωτ (2)对上式取绝对值并归一化后可得到空间阵列的方向图)(θG :}max{)(00Y Y G =θ (3)如果式中1=l w ,式(3)即是静态方向图。
1. 均匀线列阵假设均匀线阵间距为d ,以左边的阵元为参考点,另假设入射方位角为θ,图1 均匀线列阵其中方位角表示与阵列法线方向的夹角,则有:d l cx c k l )1(1sin 1-==θτ (4)式(3)可以化简为:∑=--=ml l j l e g w Y 1)1(00β (5)式中λθπβ/sin 2=,当1=l w 时又可以进一步化简为:)2/sin()2/sin(2/)(00βββm m e mg Y l m j -= (6)可得均匀线阵静态方向图图:)2/sin()2/sin()(0ββθm m G =(7)当d l j l e w β)1(-=,λθπβdd d sin 2=的式(6)可以简化为:)2/)sin(()2/)(sin(2/)(00d d l m j m m e mg Y βββββ--=- (8)于是可得指向为d θ的阵列指向图:)2/)sin(()2/)(sin()(0d d m m G ββββθ--=(9)MATLAB 仿真图方位角/度G (θ)/d B2700阵元M=8,thetad=0,均匀线阵方向图图2 指向0°时,均匀线列阵的方向图方位角/度G (θ)/d B2700阵元M=8,thetad=30,均匀线阵方向图图3 指向30°时,均匀线列阵的方向图2. 均匀平面阵假设有一个n m ⨯的均匀面阵,其几何关系如图(3),以阵列左上角的阵元为参考点,x 轴上有n 个间距为d 的阵元,y 轴上有m 个间距为d 的阵元。
阵列天线PPT课件

.
35
N元非等幅均匀阵列
• 阵因子比较 • 二项式分布阵列 • 多尔夫-切比雪夫多项式阵列 • 泰勒分布阵列
.
36
N元非等幅均匀阵列
• 阵因子比较 • 二项式分布阵列 • 多尔夫-切比雪夫多项式阵列 • 泰勒分布阵列
.
37
阵因子
• 均匀幅值阵列具有最小的半功率波束宽度 • 二项式分布幅值阵列能够实现最小的副瓣电平 • 二项式分布幅值阵列单元间距小于半波长时,副瓣
.
N元等幅均匀线阵
求解最大值点:
阵列存在唯一的一个最大值点,即m=0 求解阵因子的3dB波束点:
.
线阵实例 1: 侧射阵
• 波束最大指向θ0=90°(线阵沿Z轴),当单元 的波束最大指向和阵因子的最大波束指向均指向 θ0=90°时,便可达到最佳的侧射阵。 • 对于单元天线的波束指向要求,可以通过选择 合适的辐射单元来满足要求 • 对于阵因子的波束指向要求,可以通过合理的 调整阵列单元间的间距、每个单元的相位激励实 现。
.
N元非等幅均匀阵列
• 阵因子比较 • 二项式分布阵列 • 多尔夫-切比雪夫多项式泰勒线阵—线源激励计算
线源激励幅度的分布为
i1
Ii (p)12 Sn(m)com s()p m1
1
m0
Sn(m)=(i1[m (i )1!(i)!]21m)!ii1112A2m (2i12)2 0mi
➢在每个天线单元的馈端 以及电缆的公共馈端处各 接入一个开关 ➢控制联动开关可使波束 从边射移到45°方向
.
相控阵
➢ 每个阵列单元都有移相器和衰减器,所有馈电 电缆都布置成等长度的组合结构
.
相控阵
➢端馈相控阵也需要逐个单元配有移相器和衰减 器,由于在单元之间引入了递进的相位移,随着 频率的变化,在额定的相位移之外,还需要附加 相反的相位变化作为补偿
天线线列阵方向图
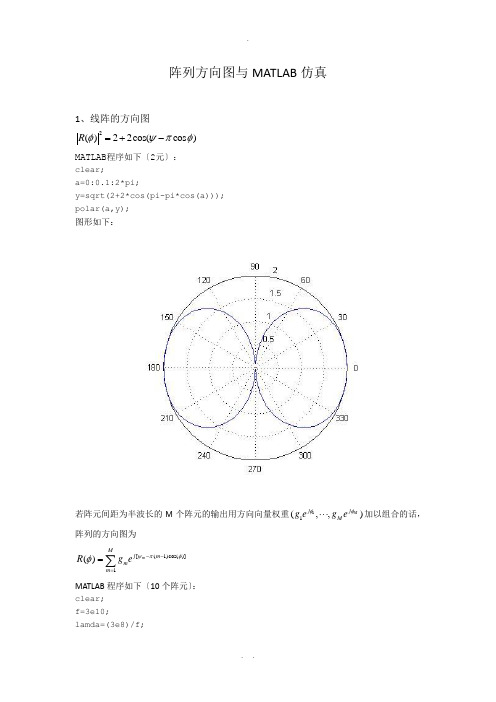
阵列方向图与MATLAB 仿真1、线阵的方向图2()22cos(cos )R φψπφ=+-MATLAB 程序如下〔2元〕:clear;a=0:0.1:2*pi;y=sqrt(2+2*cos(pi-pi*cos(a)));polar(a,y); 图形如下:若阵元间距为半波长的M 个阵元的输出用方向向量权重11(,,)M j j M g eg e φφ⋅⋅⋅加以组合的话,阵列的方向图为 [(1)cos()]1()m Mj m m m R g e ψπφφ--==∑MATLAB 程序如下〔10个阵元〕:clear;f=3e10;lamda=(3e8)/f;beta=2.*pi/lamda;n=10;t=0:0.01:2*pi;d=lamda/4;W=beta.*d.*cos(t);z1=((n/2).*W)-n/2*beta* d;z2=((1/2).*W)-1/2*beta* d;F1=sin(z1)./(n.*sin(z2));iK1=abs(F1) ;polar(t,K1);方向图如下:2、圆阵方向图程序如下:clc;clear all;close all;M = 16; % 行阵元数k = 0.8090; % k = r/lambdaDOA_theta = 90; % 方位角DOA_fi = 0; % 俯仰角% 形成方位角为theta,俯仰角位fi的波束的权值m = [0 : M-1];w = exp(-j*2*pi*k*cos(2*pi*m'/M-DOA_theta*pi/180)*cos(DOA_fi*pi/180));% w = exp(-j*2*pi*k*(cos(2*pi*m'/M)*cos(DOA_theta*pi/180)*cos(DOA_fi*pi/180)+sin(2*pi*m'/M)*si n(DOA_fi*pi/180))); % 竖直放置% w = chebwin(M, 20) .* w; % 行加切比雪夫权% 绘制水平面放置的均匀圆阵的方向图theta = linspace(0,180,360);fi = linspace(0,90,180);for i_theta = 1 : length(theta)for i_fi = 1 : length(fi)a = exp(-j*2*pi*k*cos(2*pi*m'/M-theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180));%a=exp(-j*2*pi*k*(cos(2*pi*m'/M)*cos(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)+sin(2*pi*m'/ M)*sin(fi(i_fi)*pi/180))); % 竖直放置Y(i_theta,i_fi) = w'*a;endendY= abs(Y); Y = Y/max(max(Y));Y = 20*log10(Y);% Y = (Y+20) .* ((Y+20)>0) - 20; % 切图Z = Y + 20;Z = Z .* (Z > 0);Y = Z - 20;figure; mesh(fi, theta, Y); view([66, 33]);title('水平放置时的均匀圆阵方向图');% title('竖面放置时的均匀圆阵方向图'); % 竖直放置axis([0 90 0 180 -20 0]);xlabel('俯仰角/(\circ)'); ylabel('方位角/(\circ)'); zlabel('P/dB');figure; contour(fi, theta, Y);方向图如下:3、平面阵方向图:clc;clear all;close all;Row_N = 16; % 行阵元数Col_N = 16; % 列阵元数k = 0.5; % k = d/lambdaDOA_theta = 90; % 方位角DOA_fi = 0; % 俯仰角% 形成方位角为theta,俯仰角位fi的波束的权值Row_n = [0 : Row_N-1]; Col_n = [0 : Col_N-1];W_Row = exp(-j*2*pi*k*Row_n'*cos(DOA_theta*pi/180)*cos(DOA_fi*pi/180)); W_Col = exp(-j*2*pi*k*Col_n'*sin(DOA_theta*pi/180)*cos(DOA_fi*pi/180)); % W_Col = exp(-j*2*pi*k*Col_n'*sin(DOA_fi*pi/180)); % 竖直放置W_Row = chebwin(Row_N, 20) .* W_Row; % 行加切比雪夫权W_Col = chebwin(Col_N, 30) .* W_Col; % 列加切比雪夫权W = kron(W_Row, W_Col); % 合成的权值N*N x 1% 绘制水平面放置的平面阵的方向图theta = linspace(0,180,180);fi = linspace(0,90,90);for i_theta = 1 : length(theta)for i_fi = 1 : length(fi)row_temp = exp(-j*2*pi*k*Row_n'*cos(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)); % 行导向矢量N x 1col_temp = exp(-j*2*pi*k*Col_n'*sin(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)); % 列导向矢量N x 1% col_temp = exp(-j*2*pi*k*Col_n'*sin(fi(i_fi)*pi/180)); % 竖直放置Y(i_theta,i_fi) = W'*kron(row_temp, col_temp); % 合成的导向矢量N*N x 1 endendY= abs(Y); Y = Y/max(max(Y));Y = 20*log10(Y);Y = (Y+60) .* ((Y+60)>0) - 60; % 切图% Z = Y + 60;% Z = Z .* (Z > 0);% Y = Z - 60;figure; mesh(fi, theta, Y); view([66, 33]);title('水平面放置时的面阵方向图');axis([0 90 0 180 -60 0]);xlabel('俯仰角/(\circ)'); ylabel('方位角(\circ)'); zlabel('P/dB');figure; contour(fi, theta, Y);方向图如下:4、CAPON方法波束形成MATLAB程序如下〔阵元16,信号源3,快拍数1024〕:clear alli=sqrt(-1);j=i;M=16;%均匀线阵列数目P=3;%信号源数目f0=10;f1=50;f2=100;%信号频率nn=1024;%快拍数angle1=-15;angle2=15;angle3=30;%the signal angleth=[angle1;angle2;angle3]';SN1=10;SN2=10;SN3=10;%信噪比sn=[SN1;SN2;SN3];degrad=pi/180;tt=0:.001:1024;x0=exp(-j*2*pi*f0*tt);%3个信号x0、x1、x2x1=exp(-j*2*pi*f1*tt); %x2=exp(-j*2*pi*f2*tt); %t=1:nn;S=[x0(t);x1(t);x2(t)];nr=randn(M,nn);ni=randn(M,nn);u=nr+j*ni;%复高斯白噪声Ps=S*S'./nn;%信号能量ps=diag(Ps);refp=2*10.^(sn/10);tmp=sqrt(refp./ps);S2=diag(tmp)*S;%加入噪声tmp=-j*pi*sin(th*degrad);tmp2=[0:M-1]';a2=tmp2*tmp;A=exp(a2);X=A*S2+.1*u;%接收到的信号Rxx=X*X'./nn;%相关矩阵invRxx=inv(Rxx);%搜寻信号th2=[-90:90]';tmp=-j*pi*sin(th2'*degrad);tmp2=[0:M-1]';a2=tmp2*tmp;A2=exp(a2);den=A2'*invRxx*A2;doa=1./den;semilogy(th2,doa,'r');title('spectrum'); xlabel('angle'); ylabel('spectrum'); axis([-90 90 1e1 1e5]); grid;。
第十六讲_阵列天线

n=0
均匀直线阵
阵列方向函数的幅度:
Nϕ sin 2 fα (α ) = ϕ sin 2
fα (α ) max Nϕ sin 2 = =N ϕ sin 2 ϕ =0
Fα (α ) max
Nϕ N sin sin (ψ + kd cos α ) 1 2 = 1 2 = N N ϕ 1 sin sin ψ + kd cos α 2 2
2、
π
d=λ
fα (α ) = 2 cos ψ + kd cos α) 2 ( /
π 2π d = 2 cos ( + cos α)= 2 cos ( + π cos α) 4 λ2 4
π
均匀直线阵
1、定义:N个阵列单元以相同的间距排列在一条直线上构成 的阵列。若阵列单元的激励幅度相等相位依次等幅递增,称 为N元直线阵列。 N 2 1 2、阵列方向函数: ϕ = ψ + kd cos α E1 = E1m I1 jnψ E n = E1e jnψ e jknd cosα = E1e jnϕ I n = I1e
= E1m F(α ) fα (α ) E=E1 + E 2
= E1m f阵列
方向图乘积定理:f阵列 = F(α ) fα (α )
阵元相似性:天线形式一致,辐射场形式一致 阵列单元辐射场的坐标要和阵列一致 方向图乘积定理可以推广到多元阵列 阵列单元不同:幅度和相位以及排列位置 阵列因子
F(α ) =1 f阵列 fα (α ) →
总的辐射方向函数为:
F总 =F(θ )fα x (α ) fα z (θ ) 3 sin (ψ + kd cos α ) 2 = sinθ sin ( k2h cos θ ) sin ( kh cos θ ) )
阵列天线方向图的MATLAB实现
阵列天线方向图的MATLAB 实现课程名称:MATLAB程序设计与应用任课教师:周金柱班级:04091202姓名:黄文平学号:04091158成绩:阵列天线方向图的MATLAB 实现摘要:天线的方向性是指电磁场辐射在空间的分布规律,文章以阵列天线的方向性因子F(θ,φ)为主要研究对象来分析均匀和非均匀直线阵天线的方向性。
讨论了阵列天线方向图中主射方向和主瓣宽度随各参数变化的特点,借助M ATLAB绘制出天线方向性因子的二维和三维方向图,展示天线辐射场在空间的分布规律,表现辐射方向图的特点。
关键词:阵列天线;;方向图;MATLAB前言:天线是发射和接收电磁波的重要的无线电设备,没有天线也就没有无线电通信。
不同用途的天线要求其有不同的方向性,阵列天线以其较强的方向性和较高的增益在工程实际中被广泛应用。
因此,对阵列天线方向性分析在天线理论研究中占有重要地位。
阵列天线方向性主要由方向性因子F(θ,φ)表征,但F(θ,φ)在远区场是一组复杂的函数,如果对它的认识和分析仅停留在公式中各参数的讨论上,很难理解阵列天线辐射场的空间分布规律[ 1 ]。
MATLAB以其卓越的数值计算能力和强大的绘图功能,近年来被广泛应用在天线的分析和设计中。
借助MATLAB可以绘制出阵列天线的二维和三维方向图,直观地从方向图中看出主射方向和主瓣宽度随各参数的变化情况,加深对阵列天线辐射场分布规律的理解。
1 均匀直线阵方向图分析若天线阵中各个单元天线的类型和取向均相同,且以相等的间隔d 排列在一条直线上。
且各单元天线的电流振幅均为I,相位依次滞后同一数值琢,那么,这种天线阵称为均匀直线式天线阵,如图1 所示[ 2 ]:均匀直线阵归一化阵因子为[ 3 ]:Fn(θ,φ)是一个周期函数,所以除§= 0 时是阵因子的主瓣最大值外,§= ±2 mπ(m=1,2,...)都是主瓣最大值,这些重复的主瓣称为栅瓣,在实际应用中,通常希望出现一个主瓣,为避免出现栅瓣,必须把g限制在- 2π<§<2π范围内[ 4 ],其中k=λ/2π,即波数,n 表示阵元数目。
天线方向图
dEr
Idz
2r 2
cos 1
1
jr
e
jr
dE dHr dH 0
式中,dE为电场强度;dH为磁场强度;下标r ,θ, 表示球坐标系中
的各分量。
自由空间媒质的介电常数为: 0 8.854 10 12 F / m 109 / 36F / m 磁导率为: 0 4 10 7 H / m
相位常数: 2 ,/λ为自由空间媒质中的波长;
在两根相互平行的导线上电流方向相反,两线间距d远远小于波长,
它们所激发的电磁场在两线外的周围空间因两线上电流相位相反 而相互抵消,辐射很弱。如果两线末端逐渐张开,如图 (b)所示, 辐射将逐渐增强。当两线完全展开时,如图 (c)所示,张开的两臂 上电流方向相同,辐射明显增强。对称振子后面未张开的部分就 作为天线的馈电传输线。 第11页/共57页
第39页/共57页
主瓣宽度又叫做半功率波瓣宽度或3dB波瓣宽度。根据不同 的方向图数据,大致有三种计算方法: (1) 在功率方向图中,功率为主瓣最大值一半对应两点所张 的夹角就为2 ; 0.5 (2) 在幅度方向图中,场强为主瓣最大值的0.707倍的两点所 张的夹角; (3) 在分贝方向图中,低于主瓣最大值3dB的两点所张的夹 角。 通常我们是直接导出天线的远区电场,因此常采用第二种方 法求主瓣宽度。
(4) 与理想点源天线不同,基第本9页振/共5子7页(元天线)是有方向性的。
1.2天线上的电流分布 计算实际天线辐射场的方法: 将天线分成无数个元天线,每段天线上的电流是相应实 际天线中该段的电流值; 用积分求和的方法将各个元天线的辐射场迭加起来,要 考虑空间方位和时间相位上的关系。
所以首先需要知道天线上的电流分布情况。严格求解天 线上的电流分布是一个复杂的理论问题,工程上采用近 似方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阵列方向图及MATLAB 仿真1、线阵的方向图2()22cos(cos )R φψπφ=+-MATLAB 程序如下(2元):clear;a=0:0.1:2*pi;y=sqrt(2+2*cos(pi-pi*cos(a)));polar(a,y); 图形如下:若阵元间距为半波长的M 个阵元的输出用方向向量权重11(,,)M j j M g eg e φφ⋅⋅⋅加以组合的话,阵列的方向图为 [(1)cos()]1()m Mj m m m R g e ψπφφ--==∑MATLAB 程序如下(10个阵元):clear;f=3e10;lamda=(3e8)/f;beta=2.*pi/lamda;n=10;t=0:0.01:2*pi;d=lamda/4;W=beta.*d.*cos(t);z1=((n/2).*W)-n/2*beta* d;z2=((1/2).*W)-1/2*beta* d;F1=sin(z1)./(n.*sin(z2));iK1=abs(F1) ;polar(t,K1);方向图如下:2、圆阵方向图程序如下:clc;clear all;close all;M = 16; % 行阵元数k = 0.8090; % k = r/lambdaDOA_theta = 90; % 方位角DOA_fi = 0; % 俯仰角% 形成方位角为theta,俯仰角位fi的波束的权值m = [0 : M-1];w = exp(-j*2*pi*k*cos(2*pi*m'/M-DOA_theta*pi/180)*cos(DOA_fi*pi/180));% w = exp(-j*2*pi*k*(cos(2*pi*m'/M)*cos(DOA_theta*pi/180)*cos(DOA_fi*pi/180)+sin(2*pi*m'/M)*si n(DOA_fi*pi/180))); % 竖直放置% w = chebwin(M, 20) .* w; % 行加切比雪夫权% 绘制水平面放置的均匀圆阵的方向图theta = linspace(0,180,360);fi = linspace(0,90,180);for i_theta = 1 : length(theta)for i_fi = 1 : length(fi)a = exp(-j*2*pi*k*cos(2*pi*m'/M-theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180));%a=exp(-j*2*pi*k*(cos(2*pi*m'/M)*cos(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)+sin(2*pi*m'/ M)*sin(fi(i_fi)*pi/180))); % 竖直放置Y(i_theta,i_fi) = w'*a;endendY= abs(Y); Y = Y/max(max(Y));Y = 20*log10(Y);% Y = (Y+20) .* ((Y+20)>0) - 20; % 切图Z = Y + 20;Z = Z .* (Z > 0);Y = Z - 20;figure; mesh(fi, theta, Y); view([66, 33]);title('水平放置时的均匀圆阵方向图');% title('竖面放置时的均匀圆阵方向图'); % 竖直放置axis([0 90 0 180 -20 0]);xlabel('俯仰角/(\circ)'); ylabel('方位角/(\circ)'); zlabel('P/dB');figure; contour(fi, theta, Y);方向图如下:3、平面阵方向图:clc;clear all;close all;Row_N = 16; % 行阵元数Col_N = 16; % 列阵元数k = 0.5; % k = d/lambdaDOA_theta = 90; % 方位角DOA_fi = 0; % 俯仰角% 形成方位角为theta,俯仰角位fi的波束的权值Row_n = [0 : Row_N-1]; Col_n = [0 : Col_N-1];W_Row = exp(-j*2*pi*k*Row_n'*cos(DOA_theta*pi/180)*cos(DOA_fi*pi/180)); W_Col = exp(-j*2*pi*k*Col_n'*sin(DOA_theta*pi/180)*cos(DOA_fi*pi/180)); % W_Col = exp(-j*2*pi*k*Col_n'*sin(DOA_fi*pi/180)); % 竖直放置W_Row = chebwin(Row_N, 20) .* W_Row; % 行加切比雪夫权W_Col = chebwin(Col_N, 30) .* W_Col; % 列加切比雪夫权W = kron(W_Row, W_Col); % 合成的权值N*N x 1% 绘制水平面放置的平面阵的方向图theta = linspace(0,180,180);fi = linspace(0,90,90);for i_theta = 1 : length(theta)for i_fi = 1 : length(fi)row_temp = exp(-j*2*pi*k*Row_n'*cos(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)); % 行导向矢量N x 1col_temp = exp(-j*2*pi*k*Col_n'*sin(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)); % 列导向矢量N x 1% col_temp = exp(-j*2*pi*k*Col_n'*sin(fi(i_fi)*pi/180)); % 竖直放置Y(i_theta,i_fi) = W'*kron(row_temp, col_temp); % 合成的导向矢量N*N x 1 endendY= abs(Y); Y = Y/max(max(Y));Y = 20*log10(Y);Y = (Y+60) .* ((Y+60)>0) - 60; % 切图% Z = Y + 60;% Z = Z .* (Z > 0);% Y = Z - 60;figure; mesh(fi, theta, Y); view([66, 33]);title('水平面放置时的面阵方向图');axis([0 90 0 180 -60 0]);xlabel('俯仰角/(\circ)'); ylabel('方位角(\circ)'); zlabel('P/dB');figure; contour(fi, theta, Y);方向图如下:4、CAPON方法波束形成MATLAB程序如下(阵元16,信号源3,快拍数1024):clear alli=sqrt(-1);j=i;M=16; %均匀线阵列数目P=3; %信号源数目f0=10;f1=50;f2=100;%信号频率nn=1024; %快拍数angle1=-15;angle2=15;angle3=30;%the signal angleth=[angle1;angle2;angle3]';SN1=10;SN2=10;SN3=10;%信噪比sn=[SN1;SN2;SN3];degrad=pi/180;tt=0:.001:1024;x0=exp(-j*2*pi*f0*tt); %3个信号x0、x1、x2x1=exp(-j*2*pi*f1*tt); %x2=exp(-j*2*pi*f2*tt); %t=1:nn;S=[x0(t);x1(t);x2(t)];nr=randn(M,nn);ni=randn(M,nn);u=nr+j*ni; %复高斯白噪声Ps=S*S'./nn; %信号能量ps=diag(Ps);refp=2*10.^(sn/10);tmp=sqrt(refp./ps);S2=diag(tmp)*S; %加入噪声tmp=-j*pi*sin(th*degrad);tmp2=[0:M-1]';a2=tmp2*tmp;A=exp(a2);X=A*S2+.1*u; %接收到的信号Rxx=X*X'./nn; %相关矩阵invRxx=inv(Rxx);%搜寻信号th2=[-90:90]';tmp=-j*pi*sin(th2'*degrad);tmp2=[0:M-1]';a2=tmp2*tmp;A2=exp(a2);den=A2'*invRxx*A2;doa=1./den;semilogy(th2,doa,'r');title('spectrum'); xlabel('angle'); ylabel('spectrum'); axis([-90 90 1e1 1e5]); grid;。