【ROBCAD学习】ROBCAD_44-56
【ROBCAD学习】robcad_最基本的操作过程
最基本的操作过程Robcad通常要创建两个文件夹,一个为Library;一个为Project。
Library一般存放固定的、不可更改的文件,比如:机器人,车型,测点,围栏,工装,水泥台等等。
Project一般存放的都是Library里的,在Robcad里可以被更改的文件。
Project里的文件可以更改过后,再放回Library文件里当库文件。
注:两个文件夹(包括两个文件夹)下的所有文件名必须是英文,中文不识别。
还有就是创建一个项目的时候最好是在Simulation文件夹下如:Simulation\jin\project或Simulation\jin\library。
以下是本行业使用Robcad的过程:1:打开软件在Robcad界面下,点击Setup,弹出Setup窗口→点击Project→Define→在Project name:填写项目名称→在Path:项目所在的Project的路径→点击Accept确认。
(这一步叫做“定义路径”)→点击Set library root(创建库的根目录)→删掉Filter,selection两栏中的内容,在Directories栏中找到项目的1Library路径,点击Filter键并确认。
创建好之后,点击Configuration→Store→User Project (保存)。
2:在Robcad界面下,点击Project→找到项目名称并点击进入。
弹出Layout窗口,点击Store as(另存) →在弹出窗口里填写另存名(这个时候Project文件下会出现-另存名的文件夹)。
在Layout窗口下点击Get component(获得组件),然后在Get component找出需要使用的诸如车型,机器人等等的组件。
将不需要的项目去掉,在Robcad界面下点击Setup→弹出Setup窗口→点击Projects→再点击Cancel选择要去掉的项目。
Sensor的安装方法(机器人关联Sensor)1.将传感器安装到机器人上在robcad界面下,点击上方工具栏中按钮Robcad,出现下拉菜单选择Workcell,在右下方出现工具框,选择Motion按钮,出2现Motion对话框,选择setting。
【ROBCAD学习】OLP
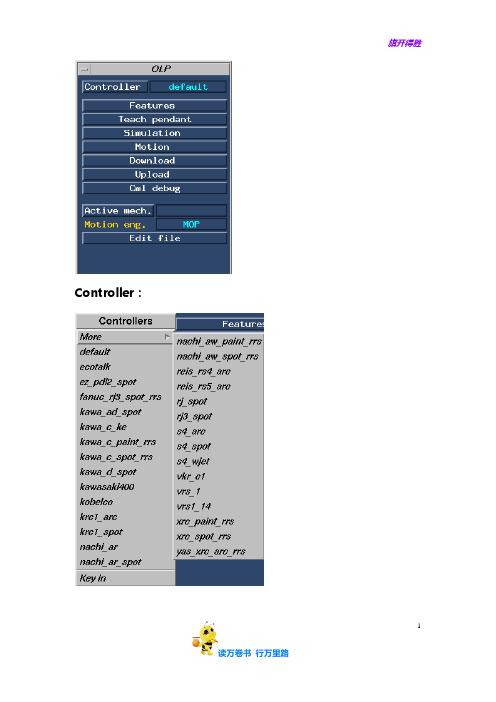
Controller:
1
Features:
Create:创建新程序,Porgramme name程序名,Programme members程序所包含的路径和点位。
Query:查询程序内容,从程序列表中选择所需要查询的程序,会显示出程序所包含的路径和点位。
Delete:删除程序,从程序列表中选择所需要删除的程序,Porg only仅删除程序,Prog path删除程序和路径,Prog path loc删除程序、路径及点位。
Add:添加程序,从程序列表中选择所需要添加的程序,Proram name程序名,Obj name路径或点位,Bofore/After选择添加的位置,New program menbers需要添加的路径或程序名。
Extract:从程序中移除路径或点位,Program name程序名,Path or loc name 需要移除的路径或点位名。
2
3。
ROBCAD_初级培训
软件状态拦
Robcad training course Create by Si Mao
键盘功能键命令介绍
软件工作状态,
F1键,为软件帮助快捷键 F2键,无命令; F3键,视图窗口居中显示
在3D视图窗口中,按F4键,弹出如下 窗口,可输出不同形式的可视化文件:
在3D视图窗口中,按F5键,弹出如下 窗口,各命令会以不同形式,显示视 图零件;和更改不同视图窗口:
Robcad能够在由产品和多类制造资源所构成的环境中,进行机器人工作单元验证和自动化制造过程的 设计、仿真、优化、分析和离线编程。它提供的并行的工程平台,能用于优化焊接工艺过程并计算焊 装节拍时间。利用Robcad,你能够在三维图形计算机工作站上设计和模拟完整的焊装单元和系统。通 过允许制造工程师在前期虚拟地验证自动化制造方法和手段,Robcad使制造商能够无瑕疵地引进自动 化过程。作为一个标准的大规模的解决软件,ROBCAD能够充分集成主要的工艺,通过一套强大的过 程特定应用,覆盖范围广,包括点焊、弧焊、激光焊和冲铆等。 ROBCAD软件的开发有着突出的优点:提高加工质量、精确度和效益;减少劳动力时间和过程工程主 导时间;极大提高程序的准确度和过程质量;优化开发和主要的投资;减少成本;加速了投入市场的 时间。
Robcad training course Create by Si Mao
ROBCAD软件介绍
工作单元布局设计和建模 除带有最全面的机器人库之外,Robcad 还能非常方便地对额外的机器人和设备进行建模。 利用Robcad 布局设计功能,能够构建三维的制造环境。一旦用Robcad 完成制造流程的 设计,就可以通过Robcad 的机器人功能,能够对机器手的运动范围和限制条件进行检查。 机器人仿真 Robcad 能基于控制器特征生成可配置机器人运动路径规划,并以此为基础,能够计算生 产节拍,分析实时性能并缩短调试周期。 真实机器人仿真(RRS) - 基于实际控制器特征的机器人运动路径规划软件提供了对 节拍时间非常精确的计算。 冲突检测 在机器人仿真和运动过程之中,Robcad 能够动态地检测冲突,以防止对设备产生高成本 的损害。 操作顺序(SOP) 利用 Robcad,能够对所有的操作和生产环节及其利用的资源(比如,机器人、机械、人 力)进行详细的描述、排序。通过该功能,能够对整个工作单元的制造过程在可视化的 环境下进行优化。 离线编程(OLP) 利用 Robcad OLP,能够准确地模拟机器人运动径和次序,并直接为车间提供机器人操作程序。Robcad 适用于大 部分机器人型号(50多个接口,超过200 多个控制器配置),它能把控制器信息-包括运动和过程属性-添加到生 成的机器人路径之中。然后,Robcad OLP生成控制器程序,随后该把程序下载到实际控制设备加以应用。 Robcad 还可以从实际设备上传程序,以供重用和进一步优化。
Robcad_Explain

UGS Tecnomatix 产品介绍利益提高制造质量、准确度和盈利能力缩短劳动时间和过程工程前置时间优化开发和资本投资更好地使用生产设备降低生产成本通过引进经过经过验证的成熟过程来缩短试运行时间缩短上市时间 概述Robcad能够在由产品和多类制造资源所构成的环境中,进行机器人工作单元验证和自动化制造过程的设计、仿真、优化、分析和离线编程。
它提供的并行的工程平台,能用于优化焊接工艺过程并计算焊装节拍时间。
利用Robcad,你能够在三维图形计算机工作站上设计和模拟完整的焊装单元和系统。
通过允许制造工程师在前期虚拟地验证自动化制造方法和手段,Robcad使制造商能够无瑕疵地引进自动化过程。
Robcad 用于机器人工作单元验证和离线编程的数字化制造环境Robcad 的价值 作为一个可升级的解决方案,Robcad 全方位集成的核心技术以及功能强大的制造过程专业应用程序,应用范围包括点焊、电弧焊、激光和水射切割、钻探和铆接以及人工操作。
Robcad 已成为行界的公认标准,有数千套软件被用于制造业,帮助企业用户改进现有的制造过程 -降低成本,提高质量并缩短上市时间。
Robcad 服务于制造过程规划团队,并包括供应商及其供应链,以及汽车、航空航天、公共设施和重型工业等行业的系统集成商和专业设计师。
用于分析、优化和验证制造自动化过程的图形环境在制造过程前期, 可以利用Robcad 作出更好、更可靠的决策,从而显著地降低资本投资、缩短规划和装配周期。
在Robcad 图形化的环境里,工艺人员能够仔细研究每一个工作单元,并在用户订购昂贵的生产机械或者设备之前能够分析、优化并验证这些工作单元的制造性能。
Robcad 能够对机器人和其它自动化设备的所有物理特征进行建模,使用户能够开发新的焊接方案的同时,快速验证机器手的运动范围(达到目标、定义路径、避免冲突并计算周期时间)。
UGS Tecnomatix 产品介绍特征与主要MCAD系统之间的交互操作性机器人、机械、工具和设备库部件建模机器人和其它自动化设备的复杂运动学建模工作单元的三维布局定义通过可达性检查、冲突检测和已经优化的周期时间,定义机器人和装配路径数个机器人的运动仿真和同步化整个制造过程、SOP(操作顺序)的建模和优化OLP(离线编程)· 直接下载机器人程序到车间控制设备· 上传已有的控制程序,以供重用和优化 与CAD系统之间的交互操作性Robcad能与大部分行业MCAD系统集成, CAD软件包括 Catia、NX、Pro/Engineer,、I-deas、CADDS5, 中间数据格式比如JT、 IGES、DXF、VDAFS、 SET、STL 和 STEP 等。
robcad学习手册、资料、讲解
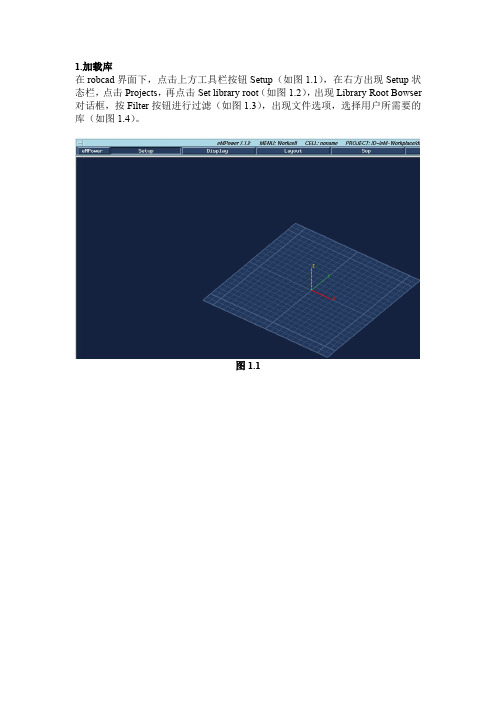
1.加载库在robcad界面下,点击上方工具栏按钮Setup(如图1.1),在右方出现Setup状态栏,点击Projects,再点击Set library root(如图1.2),出现Library Root Bowser 对话框,按Filter按钮进行过滤(如图1.3),出现文件选项,选择用户所需要的库(如图1.4)。
图1.1图1.2图1.3图1.42.加载车模在robcad界面下,点击上方工具栏按钮eMpower,出现下拉菜单选择Workcell (如图2.1)或者点击工具栏中按钮Layout(如图2.2),在右方出现Layout状态栏,点击Load cell(如图2.3),出现Load Cell对话框,选择用户所需要的车模(如图2.4)。
注:有时Cells框中无选项出现,按Thumbnails。
,出现选择对话框,选择用户所需要的车模(如图2.5)。
图2.1图2.2图2.3.图2.4图2.53.在画面中加入机器人在robcad界面下,点击上方工具栏按钮Layout(如图3.1),在右方出现Layou 状态栏,点击Get component(如图3.2),出现Get Component对话框,选择Libraries,选择用户所需要的机器人,Locate At:选择机器人位置,Instance Name:输入机器人名字(如图3.3)。
点击Locate At后的Position,出现Position对话框,点击Values,输入机器人所在位置的数据(如图3.4)。
图3.1图3.2图3.3图3.44.画面操作在robcad界面下,滚动鼠标中键滚轴拉远近视距,按住鼠标右键拖动进行画面的平移,同时按住鼠标中键+右键拖动进行画面的翻转。
5.控制机器人的运动在robcad界面下,点击上方工具栏中按钮eMpower,出现下拉菜单选择Workcell (如图5.1),在右下方出现工具框,选择Motion按钮(如图5.2),出现Motion 对话框(如图5.3),可按不同的坐标对机器人进行运动控制,点击Active mech,出现Mechanisms对话框(如图5.4),可选择机器人,点击编号或直接从界面中选择机器人。
Robcad_教程
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
24
目录
通用功能模块
1. Display模块: Viewing: ① View direction:以某实体为中心视角; ② View Points:创建某一视角; ③ Viewing panel:调整3D窗口亮度、地板大小和地板高度等; ④ Open graphics windows:同时打开多个3D窗口; ⑤ Cell view:保存窗口设置
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
15
目录
基本操作 2. 鼠标操作: 左键:选择功能; 中键:放大和缩小视角功能; 右键:现实对象的平移; 中键+右键:0~180度旋转; 3. 其他快捷键:见右图所示,在Setup 模块下的Hot key viewer中可以查看 其他快捷键的命令
F5:窗口设置
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
13
目录
基本操作 1. 键盘快捷键操作: F10:切换显示模式,按F10键,3D窗口中的资源会在“shaded”和“wireframe” 之间 切换; F11:选取模式切换,按F11键,选取模式会在“Snap”和“Where picked”之间切换;
选取对象
功能菜单
Transfer Panel
步进行程 绝对位置
相对移动
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
18
目录
资源布局
1. Placement Editor命令: Xyz Shift:
在相应的方向输入距离即可完成移动。
ROBCAD_44-56
检测干涉的过程例子对于每一个机器人都要做干涉检查,并设置每一个过程的干涉碰撞对。
过程:第一步::1.加载产品2. R1和R2的机器人进行焊接3.机器人R3搬运产品和清理夹具第二步:1.机器人R3装载ASM2. R4和R5的机器人进行焊接3.机器人R6 卸载Asm ,并清理夹具对R3进行干扰检查:1机器人.R3 在第一步与R1T R2进行配合,在第二步与R4、R5、R6进行配合。
2设置R3碰撞队列,创建一个新的碰撞对,将它命名为“r3_rbtint”(1)在“第一个列表”,添加机器人R3的EOAT、产品、资料等(和机器人关联的东西,并可能与机器人一起移动的)(2)在“第二个列表”,添加所有的机器人,比如R1,R2,R3,R4,R5,R6等,以及他们的EOAT,产品和关联产品等(和机器人相关联的,并可能与机器人一起移动的)(3)设置最小距离为150mm时,停止。
(4)激活碰撞对碰撞标签,并把开关从OFF转到L Near。
(5) 切换“EM_SPOT”到“Spot_Simulation”,选择“机器人和路径”,选择R1,R2,R4,R5,R6和各自的路径。
(6)转到“位置”选项卡,使机器人R3作用机制,并点击按钮“移动位置“。
(7)移动R3到第一次搬运,切换到“Spot_Simulation”,并点击“模拟”机器人(R1,R2,R4,R5,R6)将开始运行,R3将进行搬运。
(8)密切观看模拟,每当R3在150mm以内范围,仿真机器人会停止。
注意::所有斜粗体字代表在Robcad的术语,粗体字代表命令,作为它的标准。
上述方法是解释为干涉和明确的点,但它需要了解,同样的方法需要遵循的路径段,如第一次的搬运,清除下一个干涉,中间休息,是十分必要的,上面提到的片段必须是从干扰和干涉检查,不应该被认为只有在特定点,它应该适用于特定部分。
同样的方法和碰撞对需要为每个过程和所有的机器人来创建,以此来作为标准的一部分,即使一对可以适用于超过一个机器人。
ROBCAD培训
11. 整合数据、文档
整合ROBCAD数据时,最好在设计阶段时就将CO文件放置在Library里, 而不是Project,给客户一种严谨的工作态度的感觉 2. 所有的正式数据需一式三份(提交客户2份,一份留档)的进行光碟刻录 (光碟的封面要写清楚项目名称、数据内容、刻盘时间) 1.
注意:上述排版文件的文字内容只有小写英语和数字,将所有字母全部转换 为小写,可应用函数LOWER( )。 2. 将焊点文件导入Robcad后,根据机器人所在位置将焊点分成数条路径
没有过渡点的路径
有过渡
1. 机器人安装设备的时候需要注意机器人的型号和孔位,不同型号的 机器人孔位是不同的 2. 焊枪的TCP设定需要根据客户的标准,抓手的TCP不能使用车身的 原始坐标系
7. 机器人模拟过程以及注意细节
1. 在模拟过程中,不能光考虑焊枪的静态是否干涉,还需要注意机 器人和焊枪是否能够顺利的进出工件和夹具(尤其要注意网球拍, 不能和4轴靠近,最好留有20°的余量,如图)
20°
2. 需要注意机器人的姿态(1、6轴不能同轴线,5轴的角度需要超过正 负15°)
正负15°
6轴
设计焊枪?设计焊枪前先将焊点的方向以及角度大部分项目的焊点可调角度为5以内调整到位?根据客户要求挑选正确品牌nimakobra等合适种类的焊枪xguncgun伺服焊枪非伺服焊枪?切完section后将焊枪放入section看是否发生干涉如果发生干涉则将section另存为co数据并将section平移至原始坐标然后转换为igs文件最后做焊枪的修改意向说明文档和焊枪所需参数数据
培训内容:
1. 介绍ROBCAD的用途 2. 介绍CO、CELL的建立和保存 3. 介绍项目工作流程 4. 怎样搭建工位 5. 导入、调整焊点 6. 机器人安装设备和设定TCP 7. 机器人模拟过程以及注意细节 8. 设计焊枪 9. 调整机器人工作路径 10.制作SOP 11.数据整理、打包
ROBCAD_Basic_Training汇总
新建或打开项目的基本步骤
ROBCAD项目特点: 1,项目中无法选择存储路径,项目首先需要设 定项目的存储路径; 2,项目模块和功能模块化分比较明细; 3,模型全局坐标与现场工位中,参考全局坐标 一致; 4,注意选择模式和捕捉方式。
Seite 20
Robcad training
基本功能介绍
YUMA
软件版本
当前模块
项目名称
项目路径
捕捉方式
选取方式
2、项目存储直接存储到设置的项目文件夹下,即 不能更改存储路径;
3、软件中所有新建对象,都是新起名后添加实体 对象;
Seite 23
Robcad training
新建项目名称
装载多个项目融合在一个环境中
创建项目和工位布局
YUMA
新建项目命名
Seite 24
Robcad training
基础模块(Modeling和Workcell)
YUMA
数据结构简介
Seite 17
Robcad training
基础模块(Modeling和Workcell)
YUMA
数据结构
Seite 18
Robcad training
YUMA
基本功能介绍
Seite 19
Robcad training
YUMA
Seite 30
Robcad training
5 、Create the sub-Libraries(创建库子目录) Data/Library Utilities/Lib/Create….name
YUMA
注意:此处菜单通常情况下为灰色,即非可用 状态,只有在先设置库的根目录情况下,此菜 单才会显示高亮化;若刚初次设置,需要将库 的设置结构存储,重新打开软件,进入该项目 下,菜单才会显示高亮化。
【新提醒】Robcad软件的常用快捷键操作
【新提醒】Robcad软件的常⽤快捷键操作
2015-12-1 18:38
摘要: Robcad常⽤操作⼀:Robcad屏幕操作1、Robcad 屏幕移动:按住右键可以实现显⽰区域的左右拖动;2、Robcad 缩放:按住中键左右拖动,向右移动放⼤显⽰,向左移动缩⼩显⽰;3、Robcad 旋转视⾓:同时按住⿏标的中键和右 ...
Robcad常⽤操作⼀:Robcad屏幕操作
屏幕移动:按住右键可以实现显⽰区域的左右拖动;
1、Robcad 屏幕移动
缩放:按住中键左右拖动,向右移动放⼤显⽰,向左移动缩⼩显⽰;
2、Robcad 缩放
旋转视⾓:同时按住⿏标的中键和右键,上下左右拖动显⽰的视⾓;
3、Robcad 旋转视⾓
复制、粘贴⽂本:在⽂本输⼊框,点击⿏标中键,实现⽂本粘贴复制;
4、Robcad 复制、粘贴⽂本
最常⽤的快捷键:
5、Robcad最常⽤的快捷键
F11: 屏幕捕捉⽅式,在snap和Where Picked之间切换。
F12: 屏幕选择⽅式,在Entity和Component之间切换。
见下图右侧的PICK: Snap; Entity
Robcad常⽤操作⼆:详细的Robcad常⽤快捷键。