基于FPGA的机器人多路舵机控制器
基于FPGA的机器人多路舵机控制器
王倩;李冬雪
【期刊名称】《科学技术与工程》
【年(卷),期】2009(009)011
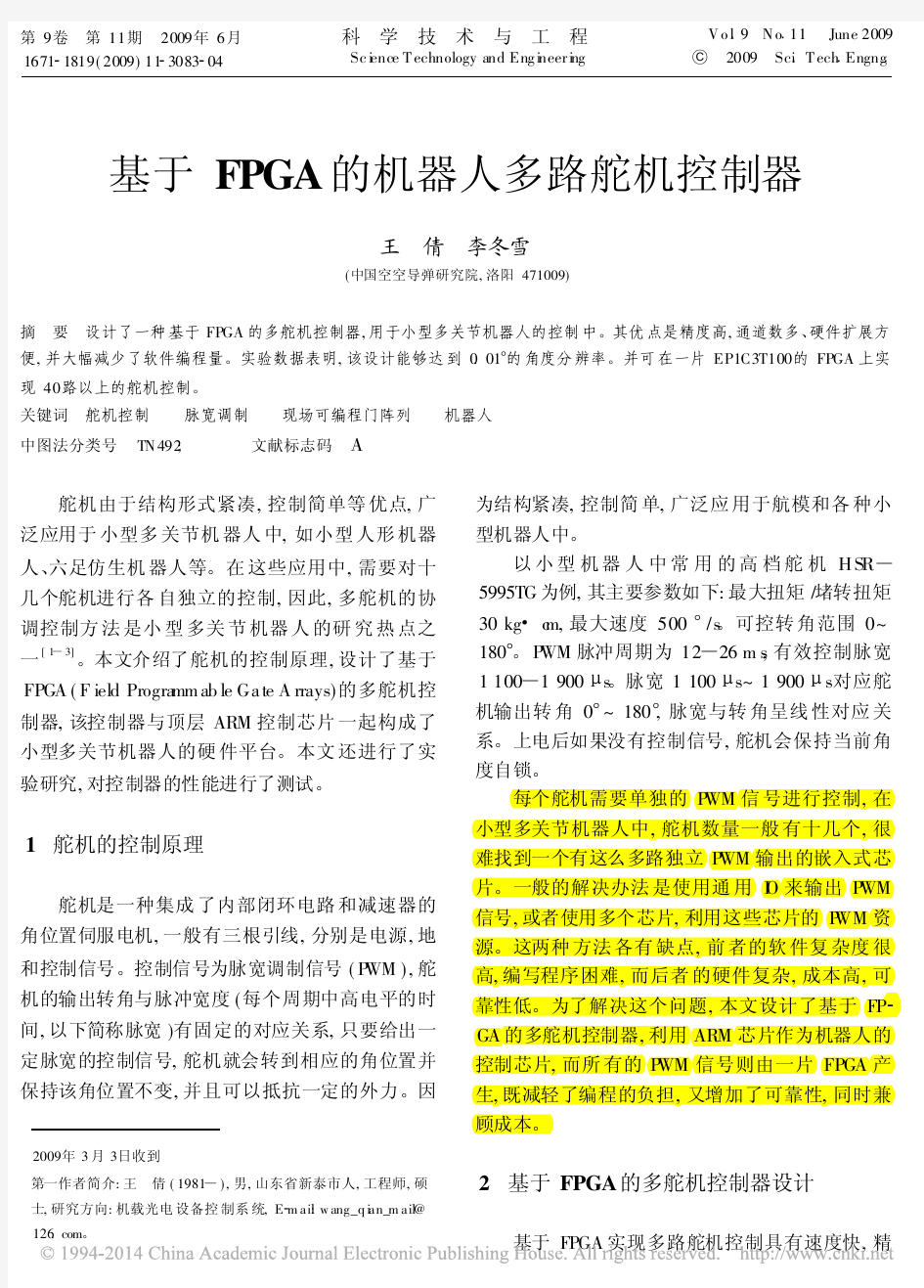
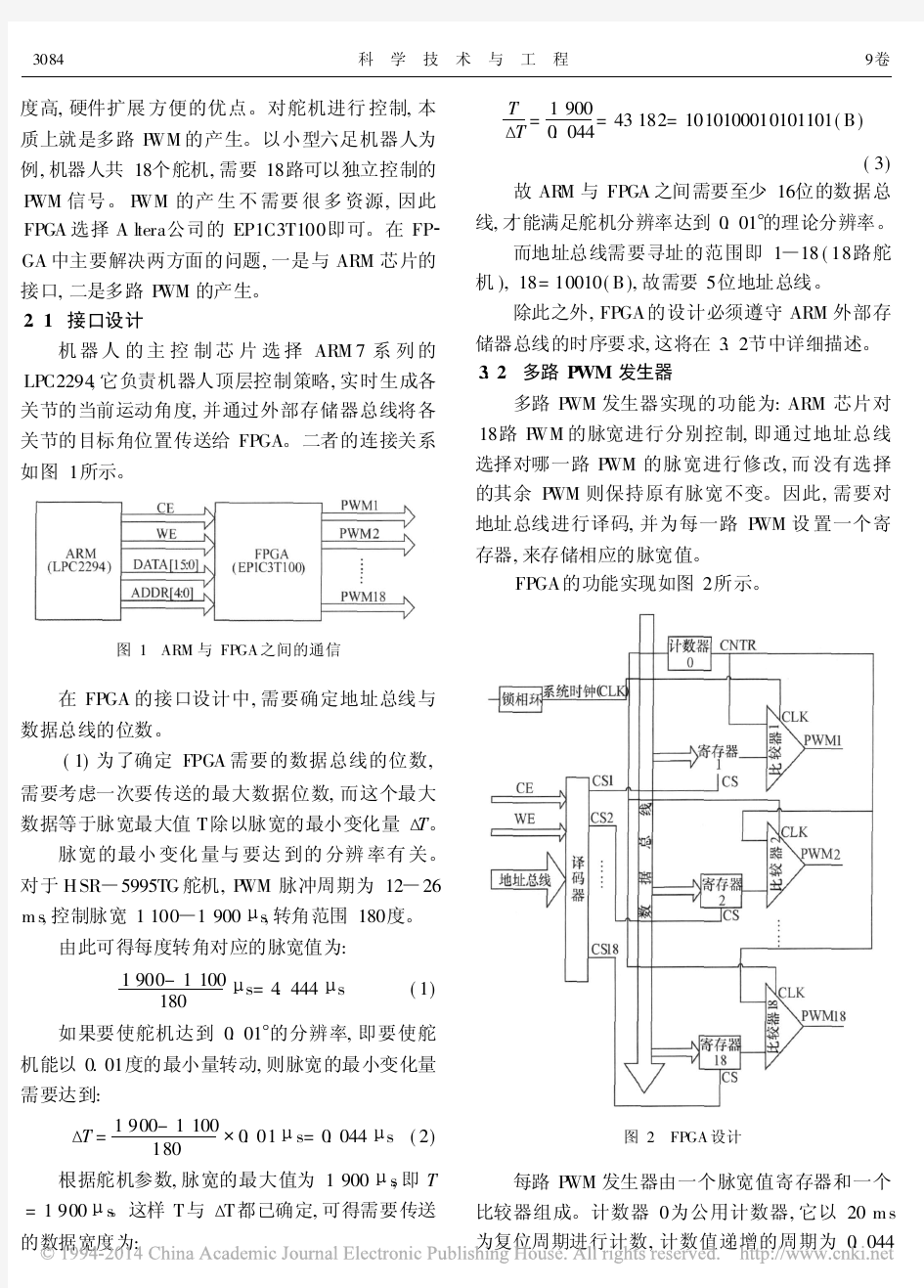
【摘要】设计了一种基于FPGA的多舵机控制器,用于小型多关节机器人的控制中.其优点是精度高,通道数多、硬件扩展方便,并大幅减少了软件编程量.实验数据表明,该设计能够达到0.01°的角度分辨率.并可在一片EP1C3T100的FPGA 上实现40路以上的舵机控制.
【总页数】4页(3083-3085,3089)
【关键词】舵机控制;脉宽调制;现场可编程门阵列;机器人
【作者】王倩;李冬雪
【作者单位】中国空空导弹研究院,洛阳,471009;中国空空导弹研究院,洛阳,471009
【正文语种】中文
【中图分类】TN492
【相关文献】
1.仿壁虎机器人多路舵机控制器设计 [J], 张龙; 孟偲; 刘颖; 王田苗
2.基于ARM+DSP+FPGA的机器人多轴运动控制器的设计与研究[J], 刘大伟; 王苏洲
3.基于DSP和电压反馈的机器人多轴运动控制器设计[J], 冯金光; 周华平; 马宏绪
4.基于DSP和电压反馈的机器人多轴运动控制器设计 [C], 冯金光; 周华平; 马
相关主题