信号与系统系统函数与信号流图
第七讲数字信号处理系统函数流图

i0
M
•
H( z )
Y( X(
z) z)
1
br z r
r 0
N
ak zk
k 1
ARMA系统 IIR系统
M
• 若所有ak 0, H(z) br zr , 系统称为MA系统 ---全零 r 0 点模型
h(n)为有限长序列---FIR系统(有限长单位脉冲响应)
• 若除b0 1外,所有br 0,
单位脉冲响 应的傅氏变
换
单位圆上的 系统函数
LTI系统的系统函数和ROC
因果系统
稳定系统 因果稳定系统
h(n)
h(n)=0,n<0 右边序列
H(z) Rx z 极点在某圆 内,收敛域 在此圆外
j Im(Z )
h(n)
n
h(n)=0,n<0
h(n)
n
H (e j ) 存在, 收敛域为
H(z)
1
N
1 ak zk
k 1
---全极点模型---AR 系统
h(n)为无限长序列---IIR系统(无限长单位脉冲响应)
一个稳定的LTI因果系统的差分方程为 y(n) 0.25y(n 1) 0.125y(n 2) x(n) x(n 1) 求系统函数H(z),单位冲激响应h(n)
解:
i 1
系统频率响应 的几何确定
N
Ci
H (e j )
A
i 1 N
Di
i 1
N
N
() i i
i 1
i 1
当频率ω从零变化到2π时,这些向量的终点B沿单位圆逆时 针旋转一周,分别估算出系统的幅度特性和相位特性
N
M
有理系统分类 y(n) ai y(n i) bi x(n i)
§5-8 LTI系统的信号流图表示

2 1 s 1 s 2
于是级联实现
X (s)
∑
S -1
∑
S -1
3
∑
Y (s )
1
《Signals & Systems》
2
大连海事大学信息科学技术学院
《信号与系统》
§5-8 LTI系统的信号流图表示
或者
X (s)
∑
S -1
∑
S -1
3
∑
Y (s )
2
1
并联实现如下图
∑
S -1
2
自环:只有一条支路的闭环。
不接触环:环路之间,无公共节点的一类环。 前向通路:由源节点至阱节点的一条通路。
于是系统的级联模拟如下:
∑
z 1
0.2
0.5
∑
Y (z )
X (z )
∑
z 1
0.1
或者:
Y (z ) X (z )
∑
z 1
0.1
0.5
∑
∑
z 1
0.2
《Signals & Systems》
大连海事大学信息科学技术学院
《信号与系统》
§5-8 LTI系统的信号流图表示
系统的并联模拟如下:
4
∑
《信号与系统》
§5-8 LTI系统的信号流图表示
§5-8 LTI系统的信号流图表示
一、 LTI系统的模拟框图表示
第一章曾介绍过,将微分方程或差分方程用模拟框图表示。由 于方程中涉及的运算只有三种:加法、数乘和微分(或差分),因 此,模拟框图中的运算器件也只有三种:加法器、数乘器和积分器 (或单位延时器)。
H ( z)
b z
信号与系统课后习题参考答案
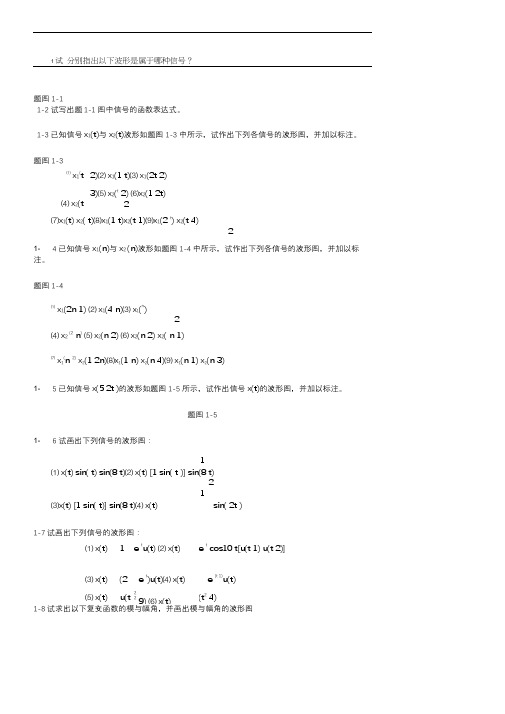
1试分别指出以下波形是属于哪种信号?题图1-11-2 试写出题1-1 图中信号的函数表达式。
1-3 已知信号x1(t)与x2(t)波形如题图1-3 中所示,试作出下列各信号的波形图,并加以标注。
题图1-3⑴x1(t2)⑵ x1(1 t)⑶ x1(2t 2)⑷ x2(t 3)⑸ x2(t 2) ⑹x2(1 2t)2⑺x1(t) x2( t)⑻x1(1 t)x2(t 1)⑼x1(2 t) x2(t 4)21- 4 已知信号x1(n)与x2 (n)波形如题图1-4中所示,试作出下列各信号的波形图,并加以标注。
题图1-4⑴x1(2n 1) ⑵ x1(4 n)⑶ x1(n)2⑷ x2 (2 n)⑸ x2(n 2) ⑹ x2(n 2) x2( n 1)⑺x1(n 2) x2(1 2n)⑻x1(1 n) x2(n 4)⑼ x1(n 1) x2(n 3)1- 5 已知信号x(5 2t )的波形如题图1-5 所示,试作出信号x(t)的波形图,并加以标注。
题图1-51- 6 试画出下列信号的波形图:1⑴ x(t) sin( t) sin(8 t)⑵ x(t) [1 sin( t )] sin(8 t)21⑶x(t) [1 sin( t)] sin(8 t)⑷ x(t) sin( 2t )1-7 试画出下列信号的波形图:⑴ x(t)1 e t u(t) ⑵ x(t) e t cos10 t[u(t 1) u(t 2)]⑶ x(t)(2 e t)u(t)⑷ x(t) e (t 1)u(t)⑸ x(t)u(t22 9) ⑹ x(t)(t2 4)1-8 试求出以下复变函数的模与幅角,并画出模与幅角的波形图1j2 ⑴ X (j ) (1 e j2)⑵ X( j1 e j4⑶ X (j ) 11 ee j ⑷ X( j )试作出下列波形的奇分量、偶分量和非零区间上的平均分量与交流分量。
题图 1-10形图。
题图 1-141-15 已知系统的信号流图如下,试写出各自系统的输入输出方程。
信号与系统6-1

C
u1 (t )
s 解: U1 ( s ) 2 s 4
R
u2 (t )
1 s s LC U 2 ( s ) U1 ( s ) H ( s ) 2 s 4 s2 s 1 RC LC
2
将激励信号的极点抵消
2 2
则不会出现强迫响应分量
可见,欲使u2(t)中不出现强迫响应分量,则必须有
试证明系统的正弦稳态响应为:
yss (t ) | H ( j0 ) | Em cos[0t (0 )]
电信学院
第六章第1讲
22
系统函数与正弦稳态响应
证:激励函数可表示为
1 f (t ) Em (e j0t e j e j0t e j ) 2 1 e j e j F ( s ) Em 激励的拉氏变换 s j s j 2 0 0
( s j 2)( s j 2) s2 4 H ( s) H 0 H0 s( s j 4)( s j 4) s( s 2 16)
j2
0
- j2
又: h(0 ) lim h(t ) lim sH ( s) 1 可得:H0=1 t 0 s 故: H (s) s 2 4
t
j
( 2)
h(t )
a
2 0
j
t e a t (t )
h(t )
t
( s a)
2
0
a
e a t sin( 0t ) (t )
第六章第1讲
t
电信学院
11
系统函数的极点与冲激响应波形对应
信号与系统 (11)
它在使用中有一些不便: 1) 不能解决信号动态范围与精度之间的矛盾; 2) 不能解决频率范围与精度之间的矛盾;
波特图采用对数坐标,解决上面的问题。而且它有利 于系统综合。
二、 对数频率特性
假设: H ( jω ) = H ( jω ) e jϕ (ω ) 。对其取对数:
G(ω) = 20log[H ( jω) ]
单位:分贝(Deci-Bel,dB)。 奈培与分贝的转换关系:1 Np = 8.686 dB
在理论分析中,一般使用 Np;在实际应用中,一般使 用 dB
用分贝表示增益,解决了信号动态范围与精度之间的 矛盾。如果在频率坐标中同样使用对数坐标,则同样可以 解决频率的范围与精度之间的矛盾。
这样一来就形成了波特图。
H ( jω)
80dB 10000
60dB 1000
40dB 100
20dB 10
01
0.001 0.01 0.1
1
-20dB
10 100 1000 10000
ω
波特图的横坐标可以用 logω ,也可以用 log f ;
在波特图的横坐标上,一般直接标注频率值;
波特图的横坐标上只能表示 ω > 0 或者 f > 0 频率下
函函
电流传输函数:
数
数
电流 I1(s) 电流 I2(s)
Ti21(s)
=
I2(s) I1(s)
电压传输函数:
电压U1(s) 电压U2 (s)
Tu
21(s)
=
U2(s) U1(s)
三、 H (s) 、 H ( p) 、 H ( jω ) 、 h(t) 之间关系
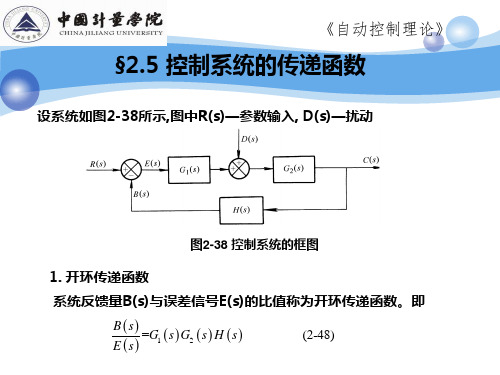
控制系统的传递函数及信号流图和梅逊公式
1 Ln LrLsLt
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
例2-7 试用梅逊公式求系统的闭环传递函数 C(S)
R(S)
图2-45 例2-7图
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
解: P1 G1G2G3.
路 开通路—通路与任一节点相交不多于一次
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
闭通路—通路的终点也是通路的起点,并且与任何其它节 点相交不多于一次
6)前向通路—从输入节点到输出节点的通路上,通过任何节 点不多于一次,此通路自然保护区为前向通路
7)回路—就是闭环通路 8)不接触回路—如果一些回路间没有任何公共节点 9)前向通路增益—在前向通路中多支路增益的乘积。 10)回路增益—回路中多支路增益的乘积。
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
信号流图的性质 (1)信号流图只适用于线性系统。 (2)支路表示一个信号对另一个信号的函数关系;信 号只能沿着支路上的箭头指向传递 (3)在节点上可以把所有输入支路的信号叠加,并把 相加后的信号传送到所有的输出支路。
(4)具有输入和输出支路的混合节点,通过增加一个具 有单位增益的支路,可以把它作为输出节点来处理。 (5)对于一个给定的系统,其信号流图不是唯一的, 这是由于描述的方程可以表示为不同的形式。
参考输入误差的传递函数为
CR(s) ER(s)G1(s)G2(s)
CR(s)
G1( s )G 2( s )
R(s) 1 G1(s)G2(s)H (s)
ER(s)G1(s)G2(s)
信号流图
(3)混联: )混联:
X1 H1 H3 X3 X2 H2 X4
X2 H2H3 X1 H1H3 X4
X4=H3X3=H3(H1X1+ H2X2)= H1H3X1 + H2H3X2
H2 X1 H1 X2 H3 X4 X3
H1H2 X1 H1H3
X3
பைடு நூலகம்
X4
▲
■
第 7页
(4)自环的消除: )自环的消除:
例 求下列信号流图的系统函数
H4
首先找出所有回路: 解 (1)首先找出所有回路: 首先找出所有回路 L1=H3G L2=2H1H2H3H5 L3=H1H4H5 (2)求特征行列式 求特征行列式
1
H1
H2
H3 G H5
2
1
△=1-(H3G+2H1H2H3H5+ H1H4H5)+ H3G H1H4H5 ( (3)然后找出所有的前向通路: 然后找出所有的前向通路: 然后找出所有的前向通路 1 p1=2H1H2H3 H = ( p1∆1 + p2 ∆2 ) ∆ p2=H1H4 (4)求各前向通路的余因子:△1 =1 , △2 =1-GH3 求各前向通路的余因子: 求各前向通路的余因子 框图也可用梅森公式求系统函数。 框图也可用梅森公式求系统函数。 ▲ ■
▲ ■ 第 3页
3、信号流图的基本性质 、
(1)信号只能沿支路箭头方向传输。 )信号只能沿支路箭头方向传输。 支路的输出=该支路的输入与支路增益的乘积 该支路的输入与支路增益的乘积。 支路的输出 该支路的输入与支路增益的乘积。 (2)当结点有多个输入时,该结点将所有输入支路 )当结点有多个输入时, 的信号相加, 的信号相加,并将和信号传输给所有与该结点相连 的输出支路。 的输出支路。 x1 d x5 如:x4= ax1+bx2+cx3 x5= dx4 x6= ex4
信号与系统-8
信号与系统-8(总分:100.00,做题时间:90分钟)一、(总题数:23,分数:100.00)1.某单输入单输出的因果LTI 系统,当激励为e 1 (t)时,相应的零状态响应为r zs1 (t)=(8e -4t -9e -3t +e -t )ε(t);当激励为e 2 (t)时,相应的零状态响应为r zs2 (t)=(e -4t -4e -3t +3e -2tε(t)。
其中e 1 (t)≠e2 (t),且e 1 (t)和e 2 (t)均为指数单调衰减的有始函数。
若已知r(0 - )=7,r"(0 - )=-25,求该系统的零输入响应r zp (t)。
(分数:2.50)__________________________________________________________________________________________ 正确答案:()解析:4e -4t +3e -3t,t≥02.某线性非时变系统,其系统函数零极点图如下图所示。
试指出H(s)的可能收敛域,并对每一种收敛域确定系统的因果性,稳定性。
(分数:2.50) __________________________________________________________________________________________ 正确答案:()解析:ROC 1 :Re[s]<-2,系统是反因果的,不稳定的 ROC 2 :-2<Re[s]<-1,系统是非因果的,不稳定的ROC 3 :-1<Re[s]<2,系统是非因果的,稳定的ROC 4 :Re[s]>2,系统是因果的、不稳定的已知某线性非时变系统,在激励信号e(t)=δ(t)-4e 2t ε(-t)作用下产生的零状态响应为一双边信号r(t),其拉氏变换为,(分数:10.00) (1).求系统函数H(s)及其收敛域;(分数:5.00)__________________________________________________________________________________________ 正确答案:()(2).若对于所有t ,e(t)=e 2t ,求响应r(t)。
信号与系统-系统函数与信号流图_图文_图文
对于负反馈,总有
二.信号流图
系统的信号流图是用一些点和有向线段来描述系统。变成信号流图形式 就是用线段端点代表信号,称为节点。有向线段表示信号传输的路径和方 向,一般称为支路,每一条支路上有增益,所以每一条支路相当于乘法器 。
信号流图中的节点可以有很多信号输入,它们是相加的关系, 而且可以有不同方向输出。
对于连续时间动态LTI系统的模拟,通常由加法器、标量乘 法器和积分器三种部件构成。
系统模拟可以理解为就是用这三种部件画出系统的信号流图 或是系统的方框图,使得流图或方框图实现了指定的系统函数。
四.系统模拟
例: 用加法器、标量乘法器和积分器三种部件模拟下面微分方程描
述的系统
解:首先考虑下面的系统
由线性时不变系统的性质知道存在下面关系
节点:
三.Mason公式
表示系统中的变量或信号的点称为节点。
支路:
连接两节点间的有向线段称为支路。 支路增益就是两节点间的增益。
输入节点(源点): 仅有输出支路的节点, 一 般为系统的输入。
输出节点(阱点): 仅有输入支路的节点,一般为系统的输出
混合节点:
既有输入支路又有输出支路的节点
三.Mason公式
四.系统模拟
方程两边积分三次得到
说明
是某信号积分三次得到,可以画出部分框图。
四.系统模拟
第一个积分器的输入信号实际是 可以画出部分系统框图
四.系统模拟
可以画出完整的系统框图
四.系统模拟
对应的信号流图为
其中
若 则
表示积分器(拉普拉斯变换的性质)
通路: 从任一节点出发沿着支路箭头方向连续地穿过 各相连支路到达另一节点的路径称为通路。
信号流图
[例]已知某三阶数字滤波器的系统函数为
5 1 2 2 3 z z 3 3 H ( z) 1 1 1 1 1 2 (1 z )(1 z z ) 3 2 2
试画出其直接型、级联型和并联型结构。
直接型
将系统函数H(z)表达为
5 1 2 2 3 z z 3 3 H (z) 1 1 1 2 1 3 1 z z z 6 3 6 x ( n) y ( n) 3 z 1 1/ 6 5/3 z 1 2/3 1/ 3 z 1 1/ 6
它的系统函数和差分方程一般有如下形式:
H ( z ) h( n) z
n 0 N 1 i 0
N 1
n
y (n) h(i) x(n i ) h(n i ) x(i )
i 0
N 1
基本的结构形式有下几种: (1)直接型(卷积型、横截型) 卷积型:差分方程是信号的卷积形式;
横截型:差分方程是一条输入x(n)延时链的横向 结构。
基本的结构形式有下几种: (1)直接型(卷积型、横截型) 直接由差分方程可画出对应的网络结构:
H ( z ) h(n) z n
n 0 N 1
y ( n) h(i ) x( n i )
i 0
N 1
直接型的转置:
(2)级联型(串联型) 当需要控制滤波器的传输零点时,可将系统函数分解 为二阶实系数因子的形式:
W z H1 z ai z X z i 0
N i
H 2 z
1 1 bi z i
i 1 N
wn ai xn i
i 0
N
yn wn bi yn i
i 1
N
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§5.6.4 系统函数和信号流图
信号与系统
主要内容
•系统方框图 •信号流图 •Mason公式 •系统模拟(第5.8节)
信号与系统
一.系统方框图
一个系统的方框图可由许多子系统的框图作适当联接组成。
子系统的基本联接方式有级联、并联和反馈三种。
(1)级联 等效系统函数为
(2)并联 等效系统函数为
一.系统方框图
(3)反馈
等效系统函数为
H (s) H1(s) 1 H1(s)H2(s)
对于负反馈,总有
H (s) H1(s) 1 H1(s)H2(s)
X (s)
E(s)
Y (s)
H1(s)
B(s)
H 2 (s)
X (s)
H1(s)
Y (s)
1 H1(s)H2 (s)
信号与系统
二.信号流图
系统的信号流图是用一些点和有向线段来描述系统。变成信号流图形式 就是用线段端点代表信号,称为节点。有向线段表示信号传输的路径和方 向,一般称为支路,每一条支路上有增益,所以每一条支路相当于乘法器。
H (s) H1(s)H2 (s)
X (s)
Y1(s) H1(s)
H 2 (s)
Y (s)
X (s)
Y (s)
H1 (s)H 2 (s)
H (s) H1(s) H2(s)
X (s)
H1(s) Y1(s)
Y (s)
H2 (s) Y2 (s)
X (s)
Y (s)
H1(s) H2 (s)
信号与系统
X (s)
Y (s) H (s)
X (s)
H (s)
Y (s)
X 2 (s)
H 24
H14
H 45
X 5 (s)
X1(s)
X 3s
X 4 (s) H 34
H 46 X 6 (s)
多输入多输出节点
信号流图中的节点可以有很多信号输入,它们是相加的关系,
X 4 X1H14 X 2H24 X 3H34
述的系统
d3 y(t) dt 3
a2
d2 y(t) dt 2
a1
dy(t) dt
a0
y(t)
b2
d 2 x(t ) dt 2
b1
dx(t) dt
b0 x(t )
解:首先考虑下面的系统
d3 y1(t) dt 3
a2
d2 y1(t) dt 2
a1
dy1(t) dt
a0
y1(t)
x(t)
由线性时不变系统的性质知道存在下面关系
H1
H2
H3
G4
H5
Y
X
X1 G2 X 2
X 3 H4 X 4 G5
系统函数为
M
Pk (s)k (s)
H k1 (s)
H1H 2 H 3 H 4 H 5
1 H2G2 H4G4 H5G5 H2H3H4H5G1 H2H4G2G4 H2G2H5G5
信号与系统
三.Mason公式
G1
H1
H2
H3
G4
H5
X
X1 G2 X 2
X 3 H4 X 4 G5
Y
信号与系统
三.Mason公式
通路: 从任一节点出发沿着支路箭头方向连续地穿过 各相连支路到达另一节点的路径称为通路。
前向通路: 从输入节点到输出节点的通路。 前向通路中通过任何节点不多于一次。
开通路: 如果通路与任一节点相遇不多于一次,则称 为开通路。
三条前向通路之(1)
X X1 X2 X3 X4 Y
P1 H1H2H3H4H5
1 1 0 0 1
三条前向通路之(2)
X X1 X4 Y
P2 H1H5H6
2 1
信号与系统
三.Mason公式
三条前向通路之(3)
X X1 X2 Y
P3 H1H 2 H 7
3 1 H4G1
L4 H2H3H4H5G1
其中(L1、L2),(L1、L3)是两两不接触的回路,没有三三不接触的 回路。
信号与系统
三.Mason公式
G1
H1
H2
H3
G4
H5
Y
X
X1 G2 X 2
X 3 H4 X 4 G5
所以流图的特征式为
(s) 1 Li LiLj 1 (L1 L2 L3 L4) (L1L2 L1L3)
而且可以有不同方向输出。
信号与系统
节点:
三.Mason公式
表示系统中的变量或信号的点称为节点。
支路:
连接两节点间的有向线段称为支路。 支路增益就是两节点间的增益。
输入节点(源点): 仅有输出支路的节点, 一 般为系统的输入。
输出节点(阱点): 仅有输入支路的节点,一般为系统的输出
混合节点:
既有输入支路又有输出支路的节点
a1
d
y1(t) dt
a0
y1(t)
可以画出部分系统框图
d2 y1 t dy1 t
x t
dt 2
dt
y1t
a2 a1 a0
信号与系统
四.系统模拟
y(t)
b2
d
2 y1(t) dt 2
b1
d
y1(t) dt
b0
y1(t)
可以画出完整的系统框图
b2 b1
x(t)
y1t
b0
y(t)
a2 a1 a0
Pk (s)k (s)
k 1
X (s)
(s)
其中 H (s) 从输入节点到输出节点之间的系统函数
(s) 特征式 (s) 1 Li LiLj LiLjLk L
Li 所有不同回路增益之和 Li Lj 所有两两互不接触回路增益乘积之和 Li Lj Lk 所有三个互不接触回路增益乘积之和
Pk (s) 从输入节点到输出节点的第k条前向通路增益
k (s)
在 (s) 中,将与第k条前向通路相接触
的回路所在项去掉后余下的部分
信号与系统
三.Mason公式
例:用Mason公式求图所示系统的系统函数
G1
H1
H2
H3
G4
H5
Y
X
X1 G2 X 2
X 3 H4 X 4 G5
解:先求环路,一共有4个环路,即
L1 H2G2 L2 H4G4
L3 H5G5
方程两边积分三次得到
y1(t)
a2
d
2 y1(t) dt 2
a1
d
y1(t) dt
a0
y1 (t )
x(t)dt
说明 y1(t)是某信号积分三次得到,可以画出部分框图。
d2 y1 t dy1 t
dt 2
dt
y1 t
信号与系统
四.系统模拟
第一个积分器的输入信号实际是
x(t)
a2
d
2 y1(t) dt 2
四.系统模拟
系统模拟指用一些标准的部件通过一定的连接方式实现指定 的系统函数。
对于连续时间动态LTI系统的模拟,通常由加法器、标量乘 法器和积分器三种部件构成。
系统模拟可以理解为就是用这三种部件画出系统的信号流图 或是系统的方框图,使得流图或方框图实现了指定的系统函数。
信号与系统
四.系统模拟
例: 用加法器、标量乘法器和积分器三种部件模拟下面微分方程描
信号与系统
四.系统模拟
对应的信号流图为
1 X
1
1
s
s
a2
a1 a0
b2 b1
1
Y1
b0
s
1 Y
1
其中
表示积分器(拉普拉斯变换的性质)
s
若 Lx(t) X (s)
则
L
t
x(τ
)
d
τ
X (s) 1 ss
0 x( ) d τ
信号与系统
作业13-6-18
P183 5-16
二、 求下列微分方程描述系统的系统函数,并画出其零极点图。
1 (H2G2 H4G4 H5G5 H2H3H4H5G1) (H2H4G2G4 H2G2H5G5)
前向通路只有一条,即 X X1 X 2 X 3 X 4 Y
所有回路都和这条前向通路接触,所以
P1 H1H2H3H4H5
1 1 0 0 1
信号与系统
三.Mason公式
G1
2H
+
v1 ( t )
-
1F
题图
+
2
v2 (t)
-
其中L1、L4是两两不接触的回路,没有三个互不接触的回路
信号与系统
H6
H7
三.Mason公式
H1
H2
H3 X3 H4
H5
Y
可以求得流图的特征式 X
X1
X2
G1
X4
G2
1 Li LiLj 1 (L1 L2 L3 L4 ) (L1L4 )
1 H4G1 H2H3H4H5G2 H5H6G2 H2H7G2 H2H4H7G1G2
y(t)
b2
d2 y1(t) dt 2
b1
dy1(t) dt
b0
y1(t)
信号与系统
四.系统模拟
d
3 y1(t) dt3
a2
d
2 y1(t) dt 2
a1
d
y1(t) dt
ቤተ መጻሕፍቲ ባይዱ
a0
y1(t)
x(t)
d 3 y1(t) dt3
a2
d 2 y1(t) dt 2
a1