阀控非对称缸电液伺服系统的三维模糊控制
对称阀控制非对称缸电液伺服系统建模分析
尸) 臼
— —
,
“
无 杆 腔活 塞有 效作 用 面 积 , 有杆 腔活 塞有 效 作用 面 积 ,
m
— —
式 ( . )所描 述 的伺 服 阀负 载流 量特 11 2 性 是 非线 性 的 。 系统 进行 动态 分析 时 , 对 必 须 将 这个 方程 线性 化 。 经过 线 性化 处理 后 的 负载 流量 特 性方 程为
出发 ,忽略 粘性力 和弹 性力 的影 响 , 各级 对 传 递 函数进 行简 化 , 整合 出对 称 阀控制 非对 称液 缸 电液伺服 系统 的传 递 函 。
l 液 压 动 力 机 构
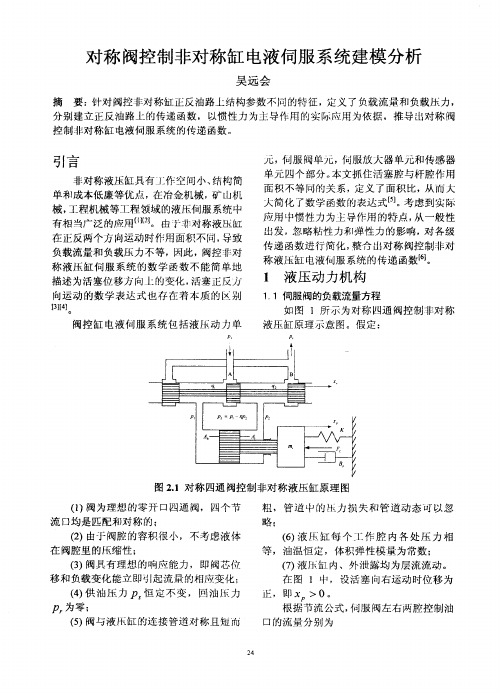
1 1伺服 阀的负载流量方程 . 如 图 1所 示 为对 称 四通 阀控制 非对 称 液压 缸原 理示 意 图。假 定 :
( .) 19
( .0 11 )
,
, , 出的流量 q 为 从 液 缸 同汕 腔流 U V ,
记 伺 服 阀 的负载 流量 为 q ,则有 【 , 3
q£= q 1 ( .1 11 )
J C
4 ~ 一 - C p)C
. ‘ 4 ・
ห้องสมุดไป่ตู้p
式 中 : C — — 液 缸 内 泄 露 系 数 ,
q= dx/P 2 CW 1 2 三 V
(2 1) ・
式 L : q — — 汕缸 尢 杆腔 流量 , m s } j q — — 油缸 有 杆腔 流量 , S C —流 量 系 数 ,无量 纲 — 节流 阀 口面 积梯 度 , m x 电液 伺 服 阀 阀芯 位 移 , m p—— . 度 , k m 油密 g P — — 汕源 压 力 , 尸 P — — 油缸 尢 杆腔 力 . Pa P — — 油 缸有 杆腔 压 力 , Pa 根据 流 量 的连 续性 , 呵写 山每个 液 缸 l 作腔 的流 量方 程 , 即 流 入液 缸 进 油腔 的流 量 g 为 + :+ c( )c . (・ 3
基于模糊控制的液压伺服系统设计与优化

基于模糊控制的液压伺服系统设计与优化引言液压伺服系统是一种广泛应用于工程领域的控制系统,它通过液压传动来实现对机械设备的运动控制。
由于液压伺服系统具有快速响应、大功率输出、稳定性好等特点,因此在工业生产中得到了广泛应用。
然而,液压伺服系统在实际运行过程中存在一些问题,如系统动态性能差、负载扰动对系统控制的影响,这就需要进行系统设计与优化,以提高液压伺服系统的性能。
一、液压伺服系统的设计1.1 系统功能需求分析首先,根据实际需求分析液压伺服系统的功能需求。
这包括系统输入输出要求、位置和速度控制要求、系统精度要求等。
通过详细的需求分析,可以明确系统设计的目标与方向。
1.2 系统结构设计液压伺服系统的结构设计是系统设计的关键步骤之一。
在设计中,需要考虑液压元件的选择、结构参数的确定以及系统各个部分之间的关系。
通过合理的系统结构设计,可以提高液压伺服系统的稳定性和响应速度。
1.3 传感器选择与布置液压伺服系统的传感器选择与布置对系统的控制性能有着重要影响。
在选择传感器时,需要考虑传感器的测量范围、精度、响应速度等因素。
同时,需要合理布置传感器以满足位置和速度的测量要求。
1.4 控制器设计液压伺服系统的控制器设计是实现系统控制的关键。
基于模糊控制的设计方案可以考虑,其可以通过模糊逻辑对液压伺服系统进行模糊建模与控制,以提高系统的鲁棒性和控制精度。
二、液压伺服系统的优化2.1 参数优化对液压伺服系统的参数进行优化是提高系统性能的关键。
通过调整液压系统中的参数,例如比例阀的开口度、平衡弹簧的刚度等,可以使液压伺服系统的响应速度和稳定性得到提高。
2.2 控制策略优化在液压伺服系统的控制过程中,选择合适的控制策略也对系统的性能起着重要影响。
除了模糊控制之外,还可以考虑其他控制策略,如PID控制、自适应控制等。
通过比较不同的控制策略,可以选择最适合系统的控制策略,以实现优化控制。
2.3 系统鲁棒性优化在液压伺服系统的设计中,鲁棒性是一个重要的指标。
基于模糊滑模控制的液压位置伺服系统仿真
M > sp fb u( ) /
( 3 1)
c 2<if 口 ) n( 1
2 2 模 糊 控制 器设 计 .
( 4 1)
式 中 ,u ( 为上 确界 函数 , f) 下确 界 函数 。 sp ) i (为 n 二 维模 糊控 制器 具有 简化 系统 结构 复杂性 的 作用 , 采用 二维模 糊控 制器 , 过模糊 控 制规律 直 通 接 设计 滑模 量 。设模 糊控 制 器 的 输入 是 s 和 , 输 出为 等效 控制 l Z ( ) 义 模糊 集 P 1定 B=正大 ,M =正 中 , S= P P
为 了保 证滑 动模 态 的存 在 , 满足 可达 性条件 ,
即在 s 0以外 的任 意 点 均 能 在 有 限 的时 间 内达 =
到 切换 面 s 0, 制 函数必 须满 足式 (2 。 = 控 1 )
s≤ 0 ( 2 1)
由式 ( )式 ( ) 式 ( ) 得 三通 阀控 差 动 1、 3和 5绘
滑模 的抖动 现 象 。仿 真结 果 表 明, 这种 控 制 方 法
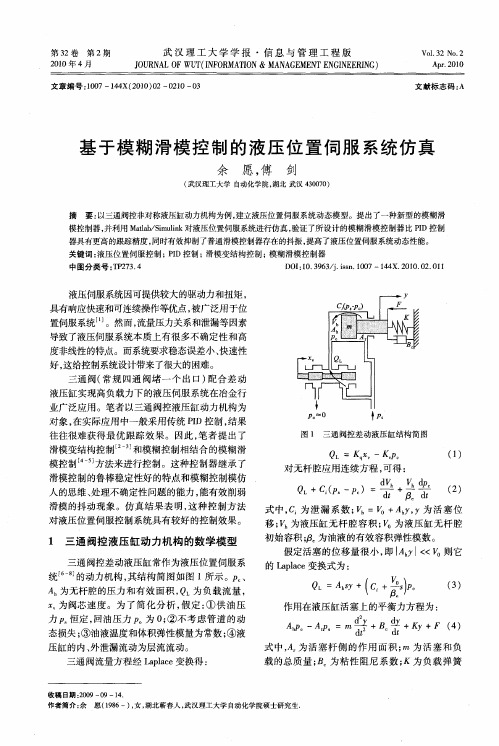
对无 杆 腔应用 连续 方程 , 可得 :
Q
)警+ =
( 2 )
式 中 , 泄 漏 系 数 ; =V A Y Y为 活 塞 位 C为 o+ , 移 ; 为液压 缸无 杆 腔 容 积 ; 为液 压 缸 无 杆 腔 初始 容积 ;。 卢 为油 液 的有效容 积 弹性模 数 。
对液压位置伺服控制系统具有较好的控制效果 。
1 三通 阀控液压缸动力机构的数学模型
三通 阀控差 动液 压缸 常作 为液压 位置伺 服 系
假定活塞的位移量很小 , J J <V 则它 即 A, < o ,
的 L pae变换式 为 : a lc
《电液位置伺服控制系统的模糊滑模控制方法研究》范文
《电液位置伺服控制系统的模糊滑模控制方法研究》篇一一、引言电液位置伺服控制系统在现代工业领域扮演着举足轻重的角色,其控制精度与响应速度直接决定了系统的工作效率与稳定性。
传统的控制方法往往在某些复杂的非线性或不确定性环境中,表现出局限性和不足。
因此,针对电液位置伺服控制系统的控制方法研究,尤其是对于模糊滑模控制方法的研究,具有重要的理论意义和实际应用价值。
二、电液位置伺服控制系统概述电液位置伺服控制系统主要由液压执行机构、传感器、控制器等部分组成。
其工作原理是通过控制器对液压执行机构进行精确控制,使系统能够按照预设的轨迹进行运动。
然而,由于系统中的各种不确定性和非线性因素,如液压系统的非线性特性、环境因素的干扰等,使得传统控制方法难以达到理想的控制效果。
三、模糊滑模控制方法研究针对电液位置伺服控制系统的特点,本文提出了一种模糊滑模控制方法。
该方法结合了模糊控制和滑模控制的优点,能够在系统面临不确定性和非线性因素时,实现更精确的控制。
1. 模糊控制模糊控制是一种基于模糊集合理论的控制方法,能够处理复杂的非线性问题。
在电液位置伺服控制系统中,模糊控制可以根据系统的实时状态,通过模糊推理,得到合适的控制策略,实现对系统的精确控制。
2. 滑模控制滑模控制是一种变结构控制方法,能够在系统面临不确定性和干扰时,通过调整系统的结构,使系统在滑模面上进行滑动,从而实现精确的控制。
在电液位置伺服控制系统中,滑模控制可以有效地抵抗系统的不确定性和非线性因素。
3. 模糊滑模控制的结合本文将模糊控制和滑模控制相结合,形成了一种新的控制方法——模糊滑模控制。
该方法在系统面临不确定性和非线性因素时,能够根据系统的实时状态,通过模糊推理得到合适的滑模面结构,并调整系统的控制策略,使系统在滑模面上进行滑动,从而实现精确的控制。
四、实验与分析为了验证模糊滑模控制在电液位置伺服控制系统中的有效性,我们进行了大量的实验。
实验结果表明,模糊滑模控制方法在面对系统的不确定性和非线性因素时,能够表现出更好的鲁棒性和控制精度。
基于模糊PID的阀控非对称缸系统仿真研究

非 常 适 合 电液 伺 服 阀控 缸 ( 尤 其 是 非 对 称 缸 )液 压 系统 。 本文 以 四通伺 服 阀控非 对称 缸 系统为 例进 行分 析 ,结合 模 糊 自适 应P I D控制 原 理 ,设计 了模 糊控 制器 并将 其 应用 于该 系统 中,以提 高 系统 的控 制精 度 和 抗干 扰能 力 ,并 利用MA T L AB / s i mu l i n k 软 件对 建立 的模型 进行 仿真 分析 ,验 证其 可行性 。
显 示 了很好 的鲁棒 性 和很 强 的控 制稳 定性 , 因此
1 )四通 伺 服 阀的流 量方程
假 定 阀是 零 开 口四边 阀 , 四 个节 流 口是 匹 配 和 对称 的 ,供 油压 力P 恒定 , 回油压 力P 0 为零。
g £= X v + : 一 ( 1 )
原 理 图 ,根 据 文 献 [ 3 ] 和【 6 】 可 列 出各 液 压动 力 元 件
的基本 方程 。
常 规P I D控制 则 毫无 优 势 可言 。此时 ,智能 控 制 系 统便 展现 出 了优 越 的性 能 。
模糊 逻辑 控制 基 于人 类经验 ,不 苛求 控制 理论 建 立的精 准数 学模 型 ,对非 线性 、复杂对 象 的控制
D o i :1 O . 3 9 6 9 / J . I s s n . 1 0 0 9 -0 1 3 4 . 2 0 1 3 . 1 2 ( 上) . 2 6
0 引言
电液伺服 阀控缸 液压 系统 以其控制精确高 的 特 点 在 钢 铁 冶 金 、 矿 山 等 行 业 中 获 得 广 泛 的 应 用 。传 统 的P I D控 制 虽然 简 单 、整 定 参 数 方 便 , 但 是 却 因 负 载 、 流 量 等 参 数 的 变 化 而 无 法 获 得 快 速 、高 精 度 、 自适 应 跟踪 好 的动 态 效果 u 。再 加上
《电液位置伺服控制系统的模糊滑模控制方法研究》
《电液位置伺服控制系统的模糊滑模控制方法研究》一、引言随着工业自动化技术的快速发展,电液位置伺服控制系统在各种高精度、高动态性能的机械设备中得到了广泛应用。
然而,由于系统中的非线性和不确定性因素,传统的控制方法往往难以达到理想的控制效果。
因此,研究新型的控制方法,提高电液位置伺服控制系统的性能,具有重要的理论意义和实际应用价值。
本文重点研究了模糊滑模控制在电液位置伺服控制系统中的应用,为解决该类问题提供了新的思路。
二、电液位置伺服控制系统概述电液位置伺服控制系统是一种以液压传动为基础,通过电机驱动液压泵,进而控制执行机构位置的系统。
其核心目标是实现对执行机构位置的精确控制。
由于系统中存在非线性和不确定性因素,如液压缸的摩擦力、外部负载扰动等,使得系统控制变得复杂。
传统的控制方法如PID控制、模糊控制等,虽然在一定程度上可以实现对系统的控制,但往往难以达到理想的控制效果。
三、模糊滑模控制方法研究针对电液位置伺服控制系统的特点,本文提出了一种模糊滑模控制方法。
该方法将模糊控制和滑模控制相结合,通过模糊控制器对系统的不确定性进行估计和补偿,同时利用滑模控制的快速性和鲁棒性,实现对系统的高精度控制。
1. 模糊控制器设计模糊控制器是本方法的核心部分。
通过对系统的不确定性因素进行观察和学习,模糊控制器可以自动调整其参数,以适应系统状态的变化。
在电液位置伺服控制系统中,模糊控制器通过接收系统的位置、速度等信息,利用模糊推理机制对系统的不确定性进行估计和补偿。
2. 滑模控制器设计滑模控制是一种变结构控制方法,其核心思想是根据系统状态的变化,实时调整系统的控制策略。
在电液位置伺服控制系统中,滑模控制器通过设计适当的滑模面和滑模控制律,使系统在受到外部扰动时,能够快速地回到预设的滑模面上,从而实现高精度的位置控制。
四、实验验证与分析为了验证本文提出的模糊滑模控制方法的有效性,我们进行了大量的实验。
实验结果表明,与传统的控制方法相比,模糊滑模控制方法在电液位置伺服控制系统中具有更好的控制性能。
阀控非对称缸电液伺服系统线性自抗扰控制
问题,本文提出了一种电液伺服系统线性自抗扰控制方法,利用线性扩张状态观测器实现综合扰动的实
时估计,并采用状态误差反馈控制律给予主动补偿,同时消除跟踪误差。证明了设计的线性扩张状态观
测器状态观测误差的收敛性。根据工程实际中的参数进行仿真研究,其结果表明这种控制方法能有效
抑制电液伺服系统中不确定性扰动,与PIT控制器相比具有较强的鲁棒性,并提高了位置跟踪精度。
181
匹配线性未知参数与非线性未知参数之间的耦合
问题,仿真 了该方法的有。方
[14]针
对电液位 服 存在的非线性、参数
问题,给出了 [15]为
自适应动态面控 设计方法O
电液控
中非线性不
数
的 ,提出了 滑模自适应控制方
,通过构建 的Lyapncov函数,设计了
自
适应控,给出了参数自适应律, 控 能oGDOURAEK等〔心 电液
收稿日期:201852-55 基金项目:山西省煤机重点科技攻关项目(MJ2014-02) 作者简介:金坤善(1778 -),男,博士研究生,主要研究方向为锻压设备及其先进控制技术;通信作者:宋建丽教授,E-maU:
sovgjianC@ bistu. edn. cn.
第44卷第3期
金坤善,等:阀控非对称缸电液伺服系统线性自抗扰控制
阀控非对称缸被动式电液力伺服系统的解耦控制研究
c o u p l i n g p r o b l e m.T a k i n g v a l v e c o n t r o l l e d a s y mm e t i r c a l c y l i n d e r p a s s i v e e l e c t r i c h y d r a u l i c s e l ' v o s y s t e m a s t h e r e s e a r c h o b j e c t ,i t s
L u o y a n g H e n a n 4 7 1 0 0 3 ,C h i n a )
Ab s t r a c t :T o s o l v e s u r p l u s f o r c e i n t e r f e r e n c e p r o b l e m o f p a s s i v e e l e c t i r c h y d r a u l i c s e Ⅳ0 s y s t e m,a c c o r d i n g t o t h e s y s t e m c h a r a c —
St u dy o n De c o u pl i n g Co nt r o l f o r Pa s s i v e El e c t r i c Hy d r a ul i c S e r v o S y s t e m wi t h Va l v e Co n t r o l l e d As y mm e t ic r a l Cy l i nd e r
2 0 1 3年 1 月
机床与液压
MACHI NE T 0OL & HYDRAUL I CS
J a n . 2 01 3
Vo 1 . 41 No .1
基于模糊控制的三通阀控缸系统仿真
关 键 词 :模 糊控 制 ; 阀控 缸 ;伺 服 阀 ;仿 真
中图 分类 号 :T0 文 献标 志码 :A J2
S mu a i n o r e W a l e Co to ln e y t m i lto f Th e — y Va v n r 1 Cy i d rS se
O 前 言
阀 控 非 对 称 液 压 缸 机 构 常 用 于液 压伺 服 控 制 系 统 ,对 于 要 求 精 确 且 平 稳 的控 制 场 合 ,对 称 四通 阀 与 不 对 称 缸 是 不 相 容 的 ,会 产 生 压 力 跃 变 并 导 致 振 动 和 噪 声 。从 安全 性 设 计 出 发 ,某 型 三 通 阀 控 缸 系 统 设 有 泄 油 阻尼 孔 , 开环 控 制 性 能 研 究 得 出 了 阻尼 孔 的直 径 。 由于 建 立 阀控 缸 系 统 的 数 学 模 型 时 采 用 了很 多
Ab t a t Th s mu a i n f t e h e — y a v c n r l y i d r y t m i t d e f r h n n i e rt a d src : e i l to o h t r e wa v l e o to c l e s se n s u i d o t e o l a i s n y n
兵 工 自 动 化
・
201 0 2. 4
86 ・
Or n n e I us r u oma i n d a c nd t y A t to
3 () 1 4
基 于模糊 控 制 的三 通 阀控缸 系统仿 真
欧 方 明
( 军驻 昆明地 区军 事代表 室 , 昆明性 时 变 系统 的控 制要 求 ,对零 开 口三 通伺 服 阀控 制差 动缸 系统进行 仿真 研 究 。根据 三 通 阀控缸 系统 的物理 模 型和 框 图建 立 系统数 学模 型 和动 态 方程 ,采 用适合 非线 性 时变 系统控 制要 求 的模 糊控 制 策略 ,在 二 维 模糊 控 制 器的基 础 上建 立 了非 线性 系统仿 真模 型 ,并进 行 Smuik仿 真 。仿真 结 果表 明 :该模 糊控 制策略 是合 适 的 , i l n
液压伺服系统的模糊模型参考学习控制
液压伺服系统的模糊模型参考学习控制摘要: 针对液压伺服系统参数不确定性, 提出了一种模糊模型参考学习控制方法。
该方法通过学习机构实时地调节模糊控制器的模糊规则, 从而使得对象的输出跟踪参考模型的输出,同时该方法具有很强的鲁棒性。
仿真结果验证了其优越性。
关键词: 液压伺服系统; 模型参考控制; 模糊控制; 学习机构The Fuzzy Model Reference Learning Control of the hydraulic servo systemAbstract: Contraposing the parameters uncertainty of hydraulic servo system, a Fuzzy Model Reference Learning Control(FMRLC)is proposed. This method can dynamically adjust the rules of fuzzy control mechanism by learning mechanism real-time, so that the output of the plant can follow the output of the reference model, and it can moderate the unknown and time - varying external load disturbances effectively. The simulation results show that the effectiveness of this approach.Key words: hydraulic servo system; model reference control; fuzzy control; learning mechanism0 引言液压系统工作环境复杂,系统存在比较大的不确定性,以及在工作过程中惯性负载的变化, 使得传统理论上所设计的控制器很难在实际中应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机床与液压》%$$%5 175%
! !
! !
%
())
图’
常规三维模糊控制器
"&$ () % ・ (*) "%% # !& ’! ! & !’ * +’ ! ; ", —伺服阀的流量—压力系数,+’ , ( " , -.) 活塞杆伸出时 ・ ",! # ",$ !* +・ 活塞杆回缩时 ・ !& ! ! ( * ( ’ !
图2
输入语言变量 的隶属函数
图4
输出语言变量 的隶属函数
也可以用解析式来描述三维模糊控制器的控制规
《机床与液压》%’’%0 ;<0%
・ #"! ・
态误差为 ’0’#%8;回缩时,系统超调量为 *0)6 ,上 升时间为 ’0#%)7,稳态误差为 ’0’#’8。可以看出,系 统的动态性能得以改善。 " (#)) 结论 (#)阀控非对称缸电液伺服系统动态性能不对称, 根据不同的运动方向给出两个量化因子不同的三维模 糊控制器能有效地解决这一问题; (%)三维模糊控制器比 234 控制器有着更为优良 的控制性能,尤其是在系统负载发生变化时,其优点 更为突出。 参考文献
’ +
(!)控制误差 ] 9 # "! 6 . ( 2 ) # "! 6 [ : ( ; ( 2 ) (%)误差增量
(!%)
!
(/)
)
] ! $ # " % 6 %. ( 2 ) # " % 6 [ . ( 2 ) ( . ( 2 ( !) (!’) (’)误差增量的增量
% % (%( ) . 2) # "’ 6 . 2) ( %( . 2 ( !) ! 9 # "’ 6 % ( (!2)
【#】张业建 : 数字式电液伺服系统的控制策略和通讯技术研 究[博士学位论文] : 哈尔滨:哈尔滨工业大学,%’’’05 【%】李士勇 : 模糊控制、神经控制和智能控制论 : 哈尔滨工 业大学出版社,#11/01:%&5 . %/5 【* 】刘向杰,柴天佑,张焕水 : 三 维 模 糊 控 制 器 的 结 构 研 究 : 自动化学报,#11/0%5(%) :%*’ . %*& 【5】范晓英,陆培新,陈文楷 : 一个新型的模糊控制器 : 控 制理论与应用,#11&0#%(&) :&1+ . )’% 作者简介:张景春,#1)) 年生,济南大学机电工程学院, 工程师。
《机床与液压》!##!E O0E!
・ @?> ・
阀控非对称缸电液伺服系统的三维模糊控制
张景春,王守仁,崔焕勇,王栋梁
(济南大学机电工程学院,!"##!!)
摘要:阀控非对称液压缸电液伺服系统是本质非线性的,液压缸正反两个方向的动态特性不一致,为了改善系统的动态性 能,本文根据液压缸活塞杆的不同运动方向分别给出了相应的三维模糊控制器来控制该系统,实验表明这种方法不仅有效地解 决了系统的不对称性,而且改善了系统的动态性能。 关键词:阀控非对称缸;三维模糊控制器;隶属函数;控制规则;不对称性
则,即
% (#&) !!〈 " "" ! !" " (# $! $")!#〉 式中, ,可引入 !、 " 为调整因子。利用式(#&)
自调整的算法。 " 的修正方法如下 # ( ・( " ( " !"# $ $・ "# $"’ ) 式中
"# 、"’ —调 整 因 子 " 的 最大值和最小值,’! "’ ! "# [ , ] ; # ! "" "’ "# $ —语 言 变 量 论 域 的 最 大值。 ! 实验研究 图 ) 为电液伺服系统的 图 ) 电液伺 服 系 统 的 方 原理 图,从 表 # 可 以 看 出, 框图 活塞杆在伸出和回缩时,一 些参数不对称。其中速度增益影响最大,回缩时的速 度增益大于伸出时的速度增益,从而使得系统的开环 增益不同。在设计控制器时,对应伸出时的三维模糊 控制器应比回缩时的 % # 大,尽量使得系统的开环增 益一致,同时给出相应的 % % 、 % * 。活塞杆的伸出和回 缩是通过 !& ( ’ )来判断的,即: ( ’ $ #) ( ’ ) (#+) & ’) !( & ’) $( & ’ $ #) !( $( !( 当 !( ( ’) ( ’ $ #) , 活塞杆伸出; (#) & ’) , ’ 时, ( -( 当 !( ( ’) ( ’ $ #) , 活塞杆回缩。 (%) & ’) - ’ 时, ( ,( 在图 + . / 中: —期望曲线, —轻载时系统输出, # % *—重载时系统输出曲线。 当 !& , ’ 时, % # ! *01、 % % ! *’0’、 % * ! #&0’ 当 !& - ’ 时, % # ! *0’、 % % ! #/0’、 % * ! *’0’
( !’
8
#- ( 567 $ + )
",! ( !’ $ + $ 86) "#! ( ! $ + $ ’)
!-! ",% ( !’ $ + $ 86)
"#% ( ! $ + $ ’)
!-%
!
三维模糊控制器的设计
% 3 2] 三维模糊控制器[ 是在通常二维模糊控制器的基础
% 上增加了误差增量的增量(! ,这样使得模糊控制 9) 器的控制性能更好。常规三维模糊控制器的结构见图 万方数据 ’,控制器的输入语言变量为:
["] 阀控非对称缸电液伺服系统动力机构的数学模型
图!
动力机构的简化模型
图中 "! ! (M) ! "M ・% !・"$ (!) #" N "M 式中: ! # —加载质量块的质量, H); ! —负载惯量折算到活塞处的等效质量, H); #" —负载折算到活塞处的等效干扰力,O。 !# N 不考虑负载弹簧刚度,动力机构的传递函为 )*+* K &’ ( ( ) N . M ・ ()# ( -) P - P - ! ! 0 # P ( P M) (( " "
!
前言 由于非对称缸具有工作空间小、构造简单、结构
紧凑等优点,因而在一些特定的电液伺服系统中得到 很好的应用。由于在阀控非称缸的电液伺服系统中, 两个运动方向上系统的开环增益不相等以及某些参数 的变化,使得两个方向上的动态特性不对称,主要表 现在超调量、稳定时间、振荡次数和稳态误差等几个 方面,这种本质上的非线性特性和不对称性会给设计 带来困难,影响系统的操作性能,并限制了它在一些 精度要求较高场合的应用。 为了克服阀控非对称缸电液伺服系统的不对称性, 进一步提高系统的动态性能,本文针对非对称缸伸出 和回缩两种不同的运动状态给出两个量化因子不同的 三维模糊控制器,克服了系统的不对称性,使得液压 缸在两个方向的运动特性基本一致。 "
, ! M ! # ! M ! ! / 1 ! 1 1 "
( )
($)
式中: )* —动力机构的速度增益,M 2 >; &’ —活塞杆头部的位移,;; +* —电液伺服阀阀芯位移,;;
"1 —系统液压固有频率, 1’A Q >;
图M 电液伺服系统实验台结构简图
图 M 为阀控非对称液压缸电液伺服系统的结构原 理图,负载质量是通过杠杆原理加到液压缸活塞杆上 的,下面所指的是折算到活塞杆上的等效质量和等效 干扰力。动力机构简化模型如图 ! 所示,依此可以建 立其数学模型。 万方数据
! ( -! M P -!) !/ !# .3 ! !/ —液体的等效体பைடு நூலகம்弹性模数,O Q ; ;
"1 N
!
(R)
. 3 K 液压缸有效容腔体积,;$ ; - M , - ! K 液压缸的有效作用面积,;! ; $N -! -M (")
・ #"! ・
! —液压缸两腔面积比,无因次; "# —系统动力机构的速度增益,! $ "; 活塞杆伸出时 "&$ () % ・ !( ’! ! & !’ * +’ ! 活塞杆回缩时 "%! #
$!"#$%&’#(&)* +,--. /(&01(* (2 3)*4%!/(&01(**%5 6’.$$%01#7 /.*#&5%1 8*%701(9.51),*#7 :%14( :.’0%$ %&’() *+(),&-(,.’() /&0-12(, 3-+ 4-’( 50(),.’() 60()7+’() ( 872,910:;2,&’(+,’7 8()+(221+() /,&007,*+(’( <(+=21>+9?,!"##!!)
%
%0 %(! & ! % ) "./ (!!)
; 1 —系统的粘性阻尼系数,1 , (+ , ") 利用公式(2) 3 (!!) ,可求出系统动力机构的 各个参数,见表 !。
表! /( 23) /$ ( 23) () ( 4) 动力机构的基本参数 4 ’%$ 2$$ %/’5*4 *5’)0 6 !$ ( !’ %’542 $5$’/’ !5*)! 6 !$ %$5/4 $5$4$
收稿时间:%’’# $ #’ $ %&
(上接第 %/+ 页) 使用冲压工艺。采用旋压技术加工钼制零件,可一次 成形。与车加工方法相比,可节约材料 *1 倍,工时 #& 倍。同时因旋压作用所造成的加工硬化现象,还可提 高材料表面的强度。