Ch12功能指令
[指南]bios指令
![[指南]bios指令](https://img.taocdn.com/s3/m/dab97d6aa36925c52cc58bd63186bceb19e8ed4f.png)
bios指令BIOS中断:1、显示服务(Video Service——INT 10H) 00H —设置显示器模式01H —设置光标形状02H —设置光标位置03H —读取光标信息04H —读取光笔位置05H —设置显示页06H、07H —初始化或滚屏08H —读光标处的字符及其属性09H —在光标处按指定属性显示字符0AH —在当前光标处显示字符0BH —设置调色板、背景色或边框0CH —写图形象素0DH —读图形象素0EH —在Teletype模式下显示字符0FH —读取显示器模式10H —颜色11H —字体12H —显示器的配置13H —在Teletype模式下显示字符串1AH —读取/设置显示组合编码1BH —读取功能/状态信息1CH —保存/恢复显示器状态(1)、功能00H功能描述:设置显示器模式入口参数:AH=00HAL=显示器模式,见下表所示出口参数:无可用的显示模式如下所列:00H:40×25 16色文本01H:40×25 16色文本02H:80×25 16色文本03H: 80×25 16色文本04H:320×200 4色05H:320×200 4色06H:640×200 2色07H:80×25 2色文本08H:160×200 16色09H:320×200 16色0AH:640×200 4色0BH:保留0CH:保留0DH:320×200 16色0EH:640×200 16色0FH:640×350 2(单色)10H:640×350 4色10H:640×350 16色11H:640×480 2色12H:640×480 16色13H:640×480 256色对于超级VGA显示卡,我们可用AX=4F02H和下列BX的值来设置其显示模式。
BIOS中断大全(2)详解BIOS指令参数
BIOS中断大全(2)13)、功能0CH 功能描述:查觅入口参数:AH=0CH CH=柱点的低8位CL(7-6位)=柱面的高2位DH=磁头DL=80H~0FFH:硬盘出口参数:CF=0——操作成功,AH=00H, 中国彩吧3d ,否则,AH=状态代码,参见功能号01H中的说明(14)、功能0DH 功能描述:硬盘系统(13)、功能0CH功能描述:查觅入口参数:AH=0CHCH=柱点的低8位CL(7-6位)=柱面的高2位DH=磁头DL=80H~0FFH:硬盘出口参数:CF=0——操作成功,AH=00H,中国彩吧3d,否则,AH=状态代码,参见功能号01H中的说明(14)、功能0DH功能描述:硬盘系统复位入口参数:AH=0DHDL=80H~0FFH:硬盘出口参数:CF=0——操作成功,AH=00H,否则,AH=状态代码,参见功能号01H 中的说明(15)、功能0EH功能描述:读扇区缓冲区入口参数:AH=0EHES:BX=缓冲区的地址出口参数:CF=0——操作成功,否则,AH=状态代码,参睹功能号01H中的解释(16)、功能0FH功能描述:写扇区慢冲区入口参数:AH=0FHES:BX=徐冲区的地址出口参数:CF=0——操作成功,否则,AH=状态代码,参见功能号01H中的说明(17)、功能10H功能描述:读取驱动器状态入口参数:AH=10HDL=80H~0FFH:硬盘出口参数:CF=0——操作成功,AH=00H,否则,AH=状态代码,参见功能号01H 中的说亮(18)、功能11H功能描述:校准驱动器入口参数:AH=11HDL=80H~0FFH:硬盘出口参数:CF=0——操作成功,AH=00H,否则,AH=状态代码,参见功能号01H 中的说明(19)、功能12H功能描述:节制器RAM诊断入口参数:AH=12H出口参数:CF=0——操作成功,否则,AH=状态代码,参见功能号01H中的说明(20)、功能13H功能描述:把持器驱动诊断出口参数:CF=0——操作成功,否则,AH=状态代码,参见功能号01H中的说明(21)、功能14H功能描述:掌握器内部诊断入口参数:AH=14H出口参数:CF=0——操作成功,否则,AH=状态代码,参见功能号01H中的说明(22)、功能15H功能描述:读取磁盘类型入口参数:AH=15HDL=驱动器,00H~7FH:软盘;80H~0FFH:硬盘出口参数:CF=1——操作失败,AH=状态代码,参见功能号01H中的说明,否则,AH=00H —未安装驱动器=01H —无改变线支撑的软盘驱动器=02H —带有改变线支持的软盘驱动器=03H —硬盘,CX:DX=512字节的扇区数(23)、功能16H功能描述:读取磁盘变更状态入口参数:AH=16HDL=00H~7FH:软盘出口参数:CF=0——磁盘未改变,AH=00H,否则,AH=06H,参见功能号01H中的说明(24)、功能17H功能描述:设置磁盘种型DL=00H~7FH:软盘AL=00H —未用=01H — 360K在360K驱动器中=02H — 360K在1.2M驱动器中=03H — 1.2M在1.2M驱动器中=04H — 720K在720K驱动器中出口参数:CF=0——操作成功,AH=00H,否则,AH=状态编码,参见功能号01H 中的说明(25)、功能18H功能描述:设置格式化媒体类型入口参数:AH=18HCH=柱面数CL=每磁讲的扇区数DL=00H~7FH:软盘出口参数:CF=0——操作成功,AH=00H,ES:DI=介量类型参数表地址,否则,AH =状态编码,参见功能号01H中的说明(26)、功能19H功能描述:磁头保护,仅在PS/2中有效,在此从略(27)、功能1AH功能描述:格式化ESDI驱动器,仅在PS/2中有效,在此从略3、串行口服务(Serial Port Service——INT 14H)00H —初始化通信口03H —读取通信口状态01H —向通信口输出字符04H —裁减初始化通信口02H —从通信口读入字符(1)、功能00H功能描述:初始化通信口入口参数:AH=00HDX=初始化通信口号(0=COM1,1=COM2,……)AL=初始化参数,参数的说明如下:波特率奇偶位结束位字的位数76543210000 = 110X0 = None0 = 1 bit10 = 7 bits001 = 15001 = Odd1 = 2 bits11 = 8 bits010 = 30011 = Even011 = 600100 = 1200101 = 2400110 = 4800111 = 9600对PS/2,可用INT 14H之功效04H跟05H去始初化其通讯快率大于9600。
机器指令执行

实验四微程序控制器设计实验一、实验目的(1)掌握时序产生器的组成原理。
(2)掌握微程序控制器的组成原理。
(3)加深理解微指令与机器指令的关系。
二、实验电路1.时序发生器TEC-4计算机组成原理实验系统的时序电路如图6所示。
图6 时序信号发生器图电路采用2片GAL22V10(U6,U7),可产生两级等间隔时序信号T1-T4和W1-W4,其中一个W 由一轮T1-T4循环组成,它相当于一个微指令周期或硬联线控制器的一拍,而一轮W1-W4循环可供硬联线控制器执行一条机器指令。
本实验不涉及硬联线控制器。
微程序控制器只使用时序信号T1-T4,产生T信号的功能集成在GAL22VlO芯片TIMER1(U6)中,另外它还产生节拍信号W1、W2、W3、W4的控制时钟CLK1。
TIMER1的输入信号中,MF接实验台上晶体振荡器的输出,频率为1MHz。
T1至T4的脉冲宽度为100ns。
CLR(注意,实际上是控制台上的CLR#信号,因为ABEL语言的书写关系改为CLR,仍为低有效信号)为复位信号,低有效。
实验仪处于任何状态下令CLR# = 0,都会使时序发生器和微程序控制器复位(回到初始状态),CLR# = l时,则可以正常运行。
复位后时序发生器停在T4、W4状态,微程序地址为000000B。
建议每次实验仪加电后,先用CLR#复位一次。
控制台上有一个CLR#按钮,按一次,产生一个CLR#负脉冲,实验台印制板上已连好控制台CLR#到时序电路CLR的连线。
TJ(停机)是控制器的输出信号之一。
连续运行时,如果控制信号TJ = l,会使机器停机,停止发送时序脉冲T1-T4、W1-W4,时序停在T4。
在实验台上为了将时序信号发生器的输入信号TJ和控制存储器产生的TJ信号区分开来,以便于连线操作,在实验台上时序信号发生器的输入信号TJ命名为TJI,而控制存储器产生的信号TJ仍命名为TJ。
QD(启动)是来自启动按钮QD的脉冲信号,在TIMER1中,对QD用MF进行了同步,产生QD1和QD2。
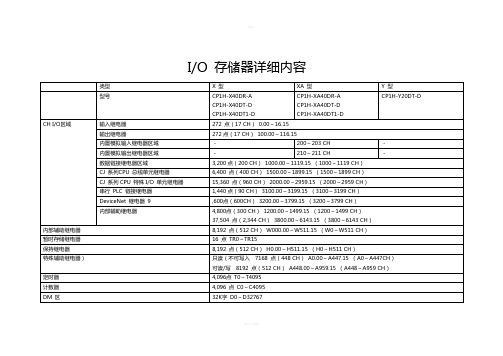
PLC指令的功能分类
保持继电器
8,192点(512 CH)H0.00~H511.15(H0~H511 CH)
特殊辅助继电器)
只读(不可写入7168点(448 CH)A0.00~A447.15(A0~A447CH)
可读/写8192点(512 CH)A448.00~A959.15(A448~A959 CH)
助记符
指令名称
助记符
指令名称
助记符
指令名称
时序输入指令
时序输出指令
LD
读
LD NOT
读·非
AND
与
AND NOT
与·非
OR
或
OR NOT
或·非
AND LD
块·与
OR LD
块·或
NOT
非
UP P.F.
上升沿微分
DOWN P.F.
下降沿微分
位测试相关
LD TST
LD型·位测试
LD TSTN
LD型·位测试非
-
10
通用输入10
-
-
高速计数器3(A相/加法/计数输入)
-
11
通用输入11
-
-
高速计数器3(B相/减法/方向输入)
-
1 CH
00
通用输入12
输入中断4
快速响应输入4
高速计数器3(Z相/复位
脉冲2原点输入信号
01
通用输入13
输入中断5
快速响应输入5
-
脉冲2原点接近输入信号
02
通用输入14
输入中断6
快速响应输入6
-
-
高速计数器2(A相/加法/计数输入)
-
05
Ch12 简单C程序介绍

MOV
LOOP: INC
R7,A
R7
;2个机器周期
;1个机器周期 ;2个机器周期
8
CJNE R7,#0AH,LOOP
而for (i=2;i<10;i++)对应的汇编语句为:
MOV LOOP: INC R7, #02H R7 ;2个机器周期 ;一个机器周期 ;两个机器周期
CJNE R7,#0AH,LOOP
个合法的C51语言程序变量名,所以必须给它起一个另外
的名字,这里起的名字是beep,必须给它们建立联系,这
里使用了C51的关键字“sbit”来进行定义。
6
延时子程序mDelay
需事先定义,只有这样,才能在主程序中被主函数 main ( )调用。自行编写的函数mDelay( )的用途是软件延 时,调用时使用的这个“500”被称为“实际参数”,以 延时500ms的时间。
4
程序的第1行是“文件包含”,是将另一个文件“reg51.h”
的内容全部包含进来。文件“reg51.h”包含了51单片机 全部的特殊功能寄存器的字节地址及可寻址位的位地址定 义。 程序包含reg51.h的目的就是为了使用P3这个符号,
即通知程序中所写的P3是指AT89C51的P1端口,而不是
其他变量。
为什么当i=0时,编译器要多花一个机器周期对for循
环初始化?这是因为在使用立即数时,单片机需要在代码
空间(程序存储器)中为该立即数申请一个存储单元,用 来存放该立即数,作为MOV指令的操作数;而累加器A是 单片机中的寄存器,使用A可以节省一个字节的存储空间 ,从而实现以时间换取空间。
9
其中 {;}在反汇编时不对应任何语句,即不占用机器周
C语言符号、指令表
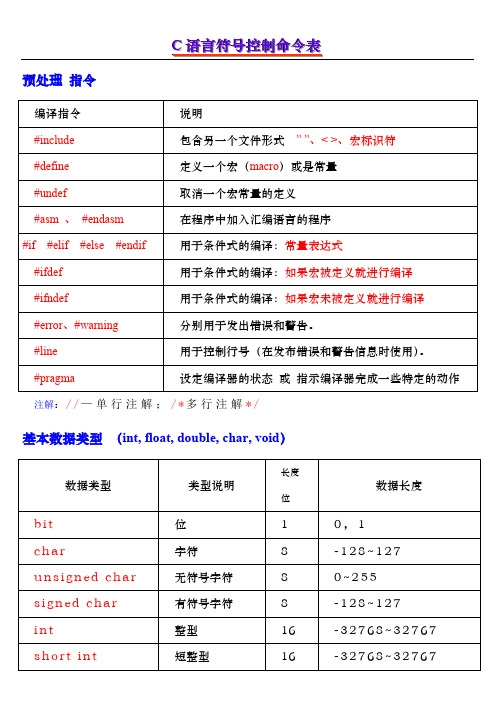
预处理指令注解://—单行注解;/*多行注解*/基本数据类型(int, float, double, char, void)用户自定义数据类型格式t y p e d e f s t r u c t{数据类型变量序列1;数据类型变量序列1;...}自定义数据类型的名称;C 32 个关键字Keil C51 扩展的关键字C语言常用转义字符表预定义标识符__FILE__ 正在编译的文件的名字__LINE__ 正在编译的文件的行号__DATE__ 编译时刻的日期字符串,例如:"25 Dec 2000" __TIME__ 编译时刻的时间字符串,例如:"12:30:55"常量表示法※假设a等于8,b等于2※比较运算结果是个布尔值既T R U E(真值)或FA L S E(假值)。
假设a等于8 逻辑运算※逻辑运算结果是个布尔值既T R U E(真值)或FA L S E(假值)。
假设a等于8 位逻辑运算※假设a等于5控制命令if语句i f(条件)语句1;e l s e语句2;例:i f(d==4)d=0;//如果d等于4就设置d等于0e l s e d++;//否则就将d加1i f(t i c k s==0){//如果t i c k s等于0t i c k s=1000;//t i c k s设置成1000c o u n t e r[0]++;//c o u n t e r[0]加1}嵌套if语句例:i f(c o u n t e r[0]==10){c o u n t e r[1]++;c o u n t e r[0]=0;i f(c o u n t e r[1]==10){c o u n t e r[2]++;c o u n t e r[1]=0;}}switch语句s w i t c h(变量){c a s e常量1:语句1;b r e a k;c a s e常量2:语句2;b r e a k;c a s e常量3:语句3;b r e a k;......d e f a u l t;语句n;}for循环f o r(初值,条件,变化值)语句;例:f o r(i=0;i<10;i++)x=x+i;f o r(i=1;i<10,i++)f o r(j=1;j<10,j++)p r i n t f(“%d%d”,i,j);无穷循环:f o r(;;);while循环w h i l e(条件)语句;例:w h i l e(c h!=!’A’)c h=g e t c h e();无穷循环:w h i l e(1);do/while循环d o{语句;...}w h i l e(条件);例:d o{c h=g e t c h e();}w h i l e(c h!=”A”);goto语句l o o p1:x++;i f(x<100)g o t o l o o p1;指针和函数指针的定义数据类型*指针变量的名字;例:c h a r*p;i n t*x;指针与数组例:c h a r f i l e n a m e[80];c h a r*p;p=f i l e n a m e;//指针p存放f i l e n a m e的开始地址i n t x[5]={1,2,3,4,5};i n t*p,s u m,i;p=x;//指针p存放数组x的开始地址f o r(i=0;i<5;i++)s u m=s u m+p[i];//p[i]相当于x[i]指针的运算1.针变量前面加上*号就是取得指针所指向位置的内容。
PLC(三菱)第三章常用功能(应用)指令
多点传送指令的要素
操作数范围 程序步
多点传送
FMOV FMOV(P)
FNC16
(16)
KnX、KnY、KnM、KnS
K、H 〈=512
T、C、D、V、Z
多点传送指令FMOV是将源操作数中的数据送到目标操作 数指定地址开始的n个元件中,指令执行后n个元件中的数 据完全相同。该指令常用于初始化程序中对某一批数据寄 存器清零或置相同数的场合。
(2)功能指令的操作数。
操作数是功能指令中参与操作的对象,是指 功能指令所涉及到的或产生的数据及数据存储 的地址,操作元件分为源操作数,目标操作数 等。 1)、源操作数:用[S]表示,在指令执行后,不 改变其内容的操作数,如图中的常数K123。 2)、目标操作数:用[D]表示,在指令执行后, 将改变其内容的操作数如图中的D500。
除法指令DIV是将指定的二个源操作数相除, 为被除数, 为 为除数,其商送到指定的目标元件 中去,而余数送 到 的下一个目标元件。图中当X4为ON时,(D0)÷ (D2)→商放于(D4)中,余数放于(D5)中。
三、数据处理类指令 1、区域复位指令 区域复位指令ZRST又称成批复位,其使用要素见表17-16。
表17-16 区域复位指令的要素
指令代码 操作数范围
指令名称
助记符 位数 [D1.] [D2.]
程序步
区域复位
ZRST
ZRST(P)
FNC40
(16)
Y、M、S、T、C、 D(D1<=D2)
ZRST、ZRSTP…5步
图中,当M8002由OFF变为ON时,将 ~ 指 定的元件号范围内的同类元件成批复位,即位元件M500~ M510全部复位;字元件C0~C10全部复位;状态元件 S20~S30全部复位。单个元件和字元件可以用RST指令复 位。
中兴芯片命令表V1.1
成功:setmac success; 失败:setmac failed;
成功:setmac success; 失败:setmac failed;
直接看灯
命
2)按reset键看telnet输出信息
按键打印信息: reset键:reset button test ok!
3):echo 0 >/proc/zteinfo/factory/factorymode 命 令退出工厂模式 打印信息:exit factory mode!
sendcmd 1 DBet
/userconfig/cfg/db_user_cfg.xml
sendcmd 1 DB set MgtServer 0 OptEnable 1
witchtst -spen/sportenable [port][enable]
port 取值 eth0 -- eth3、cpu、wan、wifi1或 wifi2
enable取值 0或1
reboot
rm /userconfig/cfg/* rm /userconfig/env_param
reboot
multicast_test getv1enable
查看igmp使能
multicast_test setv1enable
设置igmp使能
multicast_test addigmpvlan eth0 1212 1212
setmac 2 2176
返回SN前缀的值
setmac 2 2177
返回SN的值
setmac 2 2178 setmac 1 2180 XXXXXXXXXXXX
返回SN Password的值
成功:setmac success; 失败:setmac failed;
中航信指令大全
中航信指令⼤全【中航信系统指令⼤全】CHINA【春秋国旅】登录1.进⼊系统 >$$OPEN TIPC32.输⼊⼯作号>SI:⼯作号/密码3.查看PID状态>DA4.退出系统>SO5.修改密码>AN:旧密码/新密码6.随时查看SIGN-IN信息>SIIF:7.指令使⽤帮助>HELP: 指令8.屏幕向上⼀页>PB9.屏幕向下⼀页>PN10.清屏指令>CP11.重复显⽰当前页>PG12.⼀屏显⽰所有内容>PQ1查询1. 航班座位可利⽤显⽰>AV: H/城市对/⽇期/时间/ 航空公司代码(或GDS代码)2. 最早有座位航班查询>FV: 城市对/⽇期/起飞时间/座位数/航空公司代码(或GDS代码)/经停标志 / 舱位3. 航班飞⾏周期的查询>SK: 城市对/⽇期/时间/航空公司代码/ 舱位4. 航班经停点和起降时间的显⽰指令>FF: 航班号/⽇期5. 指定⽇期的航段上的航班详细信息显⽰>DSG:C/航班号/座位等级/⽇期/航段或 RT之后,>DSG: 航班序号信息查询及辅助功能⼀、24⼩时北京天⽓预报 WF >WF 城市三字代码⼆、机场转机信息查询 DSM >DSM: PEK三、机场、国家、航空公司代码查询 CNTD/CD1)查询城市三字代码>CNTD T/BEIJING2)查询城市名称>CD PEK3)查询⼀个国家所有城市>CNTD A/CN4)查询国家全称>CNTD C/CN5)查询国家两字码>CNTD N/CHINA6)查询航空公司信息>CNTD D/CA7)查询航空公司两字代码>CNTD M/AIR CHINA1)四则运算>CO 100+22)计算北京和巴黎的时差>CO T/PEKCDG3)显⽰巴黎10⽉1⽇0点的GMT标准时间>CO T/CDG/1OCT/00004)英⾥换算成公⾥>CO K/英⾥数5)公⾥换算成英⾥>CO M/公⾥数五、⽇期查询DATE1)显⽰当前⽇期和星期⼏>DATE2)显⽰10天,90天后的⽇期>DATE 10/903)显⽰2004年1⽉1⽇的前2天,及后20天的⽇期>DATE 1JAN04/-2/20六、时间查询TIME1)显⽰当前时间>TIME2)北京时间2004年1⽉1⽇零点的巴黎时间>TIME 1JAN04/0000/CDG1)100公⾥换算成英⾥>CV 100KM2)100英⾥换算成公⾥>CV 100MI3)摄⽒35度转化为华⽒度>CV 35C4)华⽒95度转化为摄⽒度>CV 95F5)10英镑转化为公⽄>CV 10LB6)10公⽄转化为英镑-磅>CV 10KG⼋、查询中⽂信息YI1)显⽰所有静态信息的⽬录>YI2)显⽰不含副标题的公告>YI标题3)显⽰有副标题的公告>YI I/某标题九、旅游信息查询TIM1)查询签证信息>TIM TIFV2)查询健康检疫信息>TIM TIFH3)同时查询签证、健康检疫信息>TIM TIFA4)查询与出⼊境有关的信息>TIM TIDFT/城市/章节/⼩标题/页码5)显⽰TIM帮助功能>TIM TIHELP6)显⽰TIM中有关规则>TIM TIRULES7)显⽰综合旅游信息新闻>TIM TINEWS8)显⽰下⼀页>TIPN9)显⽰上⼀页>TIPB建⽴PNR1)直接建⽴航段组 SS>SS CA1537/Y/1OCT/PEKNKGNN1/1225 14002)间接建⽴航段组 SD>AV PEKCAN>SD 1Y13)OPEN航段的建⽴ SN>SN YY/F/PEKCAN>SN CZ/F/PEKCAN4)ARNK段的建⽴ SA >SA TSNPEK5) 旅客⾏程提⽰>SA MU5119Y1OCT SHAPEK HK6)调整航段顺序 CS>CS 2/1⼆、姓名输⼊ NM1)英⽂姓名的输⼊>NM 1STEPHEN/HAETTI 1ZHU/QI2)同姓旅客英⽂名的输⼊>NM 2ZHANG/JIAN/QIANG3)中⽂姓名的输⼊>NM 1杨振振 1马永4)⽆⼈陪伴⼉童姓名输⼊>NM 1马晓涌(UM4)5)带⼀个婴⼉的成⼈输⼊姓名>NM 1马永>XN IN/马晓涌INF(MAR01)P16)建⽴⼀个团名为CHANGYOU的12⼈的团体PNR>GN 12CHANGYOU三、联系⽅式 CT >CT PEK/1234567四、证件信息输⼊ SSR (注意:CA表⽰相应的航空公司代码)1) 国内旅客>SSR FOID CA HK/证件代码及号码/Pn 证件种类代码:NI-⾝份证; PP-护照; ID-其他证件2) 国际旅客>SSR PSPT CA HK/护照号码/国籍/旅客⽣⽇/旅客姓/旅客名/性别及婴⼉标识/持有⼈标识/Pn注:下划线部分为必输项五、出票时限 TKTL>TK TL/1200/01OCT/BJS123六、⼿⼯票号输⼊ TKT>TKT/783-2203752149/P1七、票价信息的简易输⼊ FC/FN ⼋、选择制定航段进⾏票价计算或打票SEL>SEL: 指定航段序号九、国内BSP客票⾃动⽣成FN/FC/FP项:>PAT:⼗、国际客票经过QTE/XS FSQ, ⾃动⽣成FN/FC项:>DFSQ:⼗⼀、付款⽅式组 FP>FP:CASH/ CHECK,CNY⼗⼆、签注信息组 EI ⼗三、旅游代码组 TC (⼀般按照航空公司要求输⼊) ⼗四、打票预览 TKTV> TKTV: 打票机序号⼗五、票号⾃动传输 STN>STN: 票号/Pn/指定航段序号⼗六、客票打印 DZ打印PNR中所有⼈的客票>DZ:1仅打印第⼀个成⼈所携带的婴⼉客票>DZ:1/P1, INF仅打印第⼀个成⼈的客票>DZ:1/P1, ADL打印PNR中所有婴⼉客票>DZ:1,INF打印PNR中所有成⼈客票>DZ:1, ADL特殊服务 SSR⼀、查看航班座位图ADM>ADM:航段序号/航段⼆、进⾏机上座位预订 ASR>ASR: 航段序号/座位号三、⾥程输⼊>SSR FQTV承运航空公司代码HK1/发卡航空公司代码卡号/Pn四、其他特殊服务的申请>SSR 特殊服务代码航空公司 NN数量/Pn/Sn常⽤特殊服务代码:机位申请NSSA:⽆烟靠⾛廊的座位 NSSW:⽆烟靠窗的座位NSST:⽆烟座位 SMSA:吸烟靠⾛廊的座位SMSW:吸烟靠窗的座位 SMST:吸烟座位特殊餐⾷AVML:亚洲素⾷ BLML:流⾷CHML:⼉童餐 DBML:糖尿病患者餐FPML:⽔果拼盘 SFML:海洋餐HFML:⾼纤维餐 HNML:印度餐BBML:婴⼉餐 KSML:犹太教餐LCML:低卡路⾥餐 LFML:低胆固醇、低脂肪餐LSML:⽆盐餐 MOML:穆斯林餐VLML:素⾷(含糖、鸡蛋) VGML:素⾷(⽆糖)其他PETC:宠物(需要详细说明) BSCT:摇篮车/吊床/婴⼉摇篮BIKE:⾃⾏车(须说明数量) SLPR:机舱内床铺(不包括担架)BLND:盲⼈旅客(如果有导盲⽝或其他动物陪伴,须详细说明)BULK:超⼤⾏李(须说明数量、重量和尺⼨)CBBG:放置机舱⾏李(购买了额外座位,须说明数量,重量及尺⼨) DEAF:聋哑旅客(如果有助听狗或其他动物陪伴,须详细说明)DEPA:被驱逐出境(有⼈陪伴) DEPU:被驱逐处境(⽆⼈陪伴) XBAG:额外⾏李(须说明数量、重量和尺⼨)FRAG:易碎⾏李(须说明数量、重量和尺⼨)MEDA:健康状况(需要旅客医疗状况证明)SPEQ:体育设施(须指明设备类型、数量、重量和尺⼨)STCR:担架旅客 UMNR:⽆⼈陪伴⼉童PNR提取和修改⼀、PNR提取1)记录编号提取PNR >RT 记录编号2)根据旅客名单提取PNR >RT旅客姓名/航班号/⽇期3)提取完整PNR >RT C/记录编号4)提取PNR的历史部分>RT U5)返回到PNR的现⾏部分>RT A6)按照航班的旅客名单提取>ML C/CA1301/10DEC >RT 序号7) 提取本部门在该航班的所有订座记录(RR、HK、HN、HL、HX)>ML C/CA1321/7OCT8)提取所有团体PNR记录>ML G/CA1321/7OCT9)提取所有订妥座位的记录>ML B/CA1321/7OCT10)提取所有未证实座位的记录>ML U/CA1321/7OCT11)提取所有⾮团体PNR记录>ML NG/CA1321/7OCT⼆、国内航空公司记录的提取和转换>RRT: V/航空公司记录编号/航班号/⽇期>@OK三、记录分离SP >SP 1/3四、记录修改1)旅客姓名修改>1/1杨振2)删除姓名组以外的内容>XE 序号3)取消PNR>XEPNR@五、记录封⼝ @1)正常封⼝>@2)以下⼏种情况可使⽤@K封⼝>@Ka)将KK,KL或TK变为HKb)将UU,US或TL变为HLc)将TN变为HNd)将带有NI,UC,UN的项移到PNR的历史部分3)以下情况可使⽤@I封⼝>@Ia)航段不连续b)有航班变更标识c)两个连接航段的停留时间⼩于最⼩连接时间公布运价的查询⼀、国内公布运价查询:1).查询城市对间当前可⽤票价FD>FD:城市对/⽇期/航空公司代码/查询选项(S排序由低到⾼;L最低价)2).运价限制条件信息查询PFN>PFN: 规则号/ 承运⼈或在FD的基础上>PFN: 运价序号3).查询运价的航线限制PFR在FD基础上有航线限制标识的情况下>PFR: 运价序号⼆、航空公司净价查询:(需要航空公司授权)1.查询运价总则>NFN:GR00/CA2.按城市对查询票价信息:>NFD:PEKLON/CA3.指定旅⾏⽇期查询:>NFD:PEKLON/21MAY04/CA4.查询单程票价>NFD:PEKLON/CA*OW5.查询M舱票价>NFD:PEKLON/CA#M6.查询运价基础为HIT的票价>NFD:PEKLON/CA@HIT7.查询学⽣票价>NFD:PEKLON/CA*SD8.查询团队票价>NFD:PEKLON/CA*GC9.显⽰第3条票价的规则限制>NFN:310.显⽰第3条票价的航线规定>NFR:311.显⽰第4条票价的签注信息>NFE:412. 修改查询条件,快速重新查询票价:>NFC:13.指定航线查询>NFQ:PEK15MAY04LONPEK/CA14. 按协议查询>NFL:/CA15. 显⽰第2条协议的内容>NFL:216.显⽰第2条协议中的所有票价>NFL:2*ALL操作流程⽰例:某北京旅客要在5⽉1⽇去新加坡或吉隆坡,5⽉7⽇回北京,希望获得最便宜的往返客票。
指令练习(1)
MOV指令练习1.将1234H赋给CXMOV CX,1234H2.将BH的内容设置成和BL相同。
MOV BL,BH3.执行MOV AL,-5H后,AL里是什么内容?(二进制表示) 111110114.将DL里的内容存到1000H单元。
MOV [1000H],DL5.将地址为1000H的存储单元里的字节内容拷贝到地址为2000H单元。
MOV DH,[1000H]MOV [2000H],DH6.将地址为1000H的存储单元里的字内容拷贝到地址为2000H单元。
MOV SI,[1000H]MOV [2000H],SI7.将DS的值赋给ES。
MOV AX,DSMOV ES,AX8.将1234H赋给DS。
MOV BX,1234HMOV DS,BX9.将66H(字节)赋给地址为2000H的单元。
MOV BYTE PTR [2000H],66H10.将66H(字)赋给地址为3000H的单元。
MOV WORD PTR [3000H],66H二.堆栈指令练习PUSH POP1.将AX入栈。
PUSH AX2.将1000H单元里的内容入栈。
PUSH [1000H]3.将AL入栈。
PUSH AX4.将1234H入栈。
MOV AX,1234HPUSH AX5.将出栈数据存入BX。
POP BX6.将出栈数据存入20H单元。
POP [20H]7.用三种方法实现将AX、BX数据交换。
a. .MOV CX,AXMOV AX,BXMOV BX,CXb. PUSH AXPUSH BXPOP AXPOP BXc. XCHG AX,BX8.已知全班汇编语言成绩表存放在以mark为首地址的存储区内,根据学生编号(从0号开始)查询该生成绩。
算术运算类指令练习MOV BX,OFFSET MARK(在前面加offset意思是把分数取出)MOV AL,NUM(num是给学生编号)XLA T(查表指令)9.AX和内存单元Y相加,结果存于YADD Y,AX10.AH和AL相加,结果存于AHADD AH,AL11.内存单元X和内存单元Y相加,结果存于XMOV AX,YMOV X,AX12.求BX减100SUB BX,10013.求AX、SI、进位位之和,结果存于AXADC AX,SI14.求AX减SI,并减去借位位,结果存于AXSBB AX,SI15.将内存单元X加1,写出两种指令,有何异同?ADD X,1INC X(INC是只增指令,直接加1,不影响CF标志)16.将内存单元Y减1,写出两种指令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Date: 2014-4-8
Page: 18
CH12 PLC用于模拟量和位置控制
2.脉冲输出模块FX-1PG(FX2、FX2C用)
FX-1PG 脉冲输出模块是一种根据 FROM/TO 指令进行 与FX2、FX2C系列PLC数据交换的特殊功能模块。用一台 FX-1PG独立进行一轴定位控制,而一台PLC则最多可连 8台FX-1PG。
Date: 2014-4-8
Page: 19
CH12 PLC用于模拟量和位置控制
3.脉冲输出单元FX-1GM(FX2、FX2C用)
FX-1GM是一种采用定位专用语言的简易高功能定 位装置。通用的具有7点输入、7点输出,还备有定位 控制编程语言。 FX-1GM 脉冲输出单元最高输出频率为 100K 波特率, 可得到足够的控制精度。
Page: 16
CH12 PLC用于模拟量和位置控制
1.点位控制的脉冲输出单元F2-30GM
脉冲输出单元F2-30GM与步进电机或伺服电机驱 动器相接,可驱动步进电机或伺服电机实现位置控制。
Date: 2014-4-8
Page: 17
CH12 PLC用于模拟量和位置控制
F2-30GM应用系统方框图
Date: 2014-4-8
Page: 24
CH12 PLC用于模拟量和位置控制
1.角位控制开关F2-32-RM-SET
F2-32RM-SET可编程轮开关集CPU、电源、输入、输 出编程器于一体,可通过简单的键操作,替代32个凸轮 开关,进行32个输出动作,实现角位置控制。
Date: 2014-4-8
工程化反变换
工程量 0~100% ……
CPU
软件实现
Date: 2014-4-8
Page: 11
CH12 PLC用于模拟量和位置控制
4.模拟量输出模块FX-2DA
FX-2DA为2通道12位D/A转换模块,每个通道可独立 设置电压或电流输出。FX-2DA是一种与F2-6A相比具有 高精确度的输出模块。
CH12 PLC用于模拟量和位置控制
第十二章
PLC用于模拟量和位置控制
一、模拟量控制
模拟量输入/输出单元 A/D转换、D/A转换
二、位置控制
脉冲输出单元 运动控制模块
Date: 2014-4-8
Page: 1
CH12 PLC用于模拟量和位置控制
一、模拟量输入/输出单元
以三菱公司的F2-6A模块为例,来说明模拟量输
Page: 10
CH12 PLC用于模拟量和位置控制
◇
D/A转换(D/A、AO)的作用
调节阀 变频器 ……
执行器控制信号 4~20mA 0~10mA 1~5VDC 0~10VDC ……
数模转换 (D/A、AO)
数字信号 0~4095 0~1023 ……
端口 (地址)
数字信号 0~4095 0~1023 ……
汇点式
分组式
分隔式
Date: 2014-4-8
Page: 6
CH12 PLC用于模拟量和位置控制
Date: 2014-4-8
Page: 7
CH12 PLC用于模拟量和位置控制
2.温度传感器模拟量输入模块FX-2AD-PT
FX-2AD-PT是2通道温度传感器输入12位A/D转换 模块,这是一种内附温度传感器前置放大器的模拟电 压量输入模块,它可以直接与三线的铂电阻PT-100直 接连接。
Date: 2014-4-8 Page: 5
CH12 PLC用于模拟量和位置控制
1.模拟量输入模块FX-4AD
FX-4AD为4通道12位A/D转换模块,根据外部连 接方法及PLC指令,可选择电压输入或电流输入,是 一种与F2-6A相比具有高精确度的输入模块。
COM X0 X1 X2 X3 X4 X5 X6 COM2 Y2 Y3 COM1 Y0 Y1 COM1 Y0 COM2 Y1 COM3 Y2 COM4 Y3
Date: 2014-4-8
Page: 8
CH12 PLC用于模拟量和位置控制
3.热电偶温度传感器模拟量输入模块 FX-4AD-TC
FX-4AD-TC是4通道热电偶温度传感器模拟量输入 模块。
Date: 2014-4-8
Page: 9
CH12 PLC用于模拟量和位置控制
Date: 2014-4-8
入输出单元模块的有关性能: F2-6A是三菱公司F1、F2系列PLC的扩展单元, 为8位4通道输入、2通道输出的模拟量输入输出单元 模块。 F2-6A模块与F1、F2系列PLC连接示意图如下:
Date: 2014-4-8
Page: 2
CH12 PLC用于模拟量和位置控制
◇
A/D转换、D/A转换
模数转换(A/D)模块:将现场仪表输出的 (标准)模拟量信号0-10mA、4-20mA、1-5VDC等转 化为计算机可以处理的数字信号 数模转换(D/A)模块:将计算机内部的数 字信号转化为现场仪表可以接收的标准信号4-20mA 等。 如:12位数字量(0-4095)→ 4-20mA 2047 对应的转换结果: 12mA
Date: 2014-4-8
Page: 3
CH12 PLC用于模拟量和位置控制
◇
检测仪表
A/D转换(A/D、AI)的作用
变送器: 温度变送器 压力变送器 流量变送器 液位变送器 现场仪表模拟信号 成分分析仪 4~20mA 传感器: 0~10mA Pt100 1~5VDC Cu50 mV、Ω 热电偶 …… ……
CH12 PLC用于模拟量和位置控制
2.A系列的运动控制模块
(2)实现运动控制和顺控一体化的A73CPU模块 A73CPU是A系列PLC中一种专门用于运动控制的CPU。 以A73CPU为核心的三菱多轴定位系统,将伺服控制功能 和顺控、逻辑控制等功能以最佳方式结合在一起,以适 应工厂自动化所必须满足的多品种、小批量生产的要求, 达到生产的高度灵活性和可靠性的统一。
CH12 PLC用于模拟量和位置控制
位置控制功能模块AD72的工作原理框图:
PC (ACPU) 脉冲 减计 数器 数据 设置 AD72 计数脉冲 A/D 转换器 模拟电压 驱动单元 速度命令 司服 放大 M 司服电机
程序
接口
反馈脉冲 数据传送 GPP TU PLG
Date: 2014-4-8
Page: 27
Date: 2014-4-8
Page: 15
CH12 PLC用于模拟量和位置控制
◇
脉冲输出单元
1.点位控制的脉冲输出单元F2-30GM 2.脉冲输出模块FX-1PG(FX2、FX2C用) 3.脉冲输出单元FX-1GM(FX2、FX2C用) 4.2轴定位单元FX-20GM
Date: 2014-4-8
CH12 PLC用于模拟量和位置控制
Date: 2014-4-8
Page: 22
CH12 PLC用于模拟量和位置控制
Date: 2014-4-8
Page: 23
CH12 PLC用于模拟量和位置控制
◇
运动控制模块
1.角位控制开关F2-32-RM-SET
2.A系列的运动控制模块 (1)位置控制功能模块AD71和AD72 (2)实现运动控制和顺控一体化的A73CPU 模块
COM X0 X1 X2 X3 X4 X5 X6 COM2 Y2 Y3 COM1 Y0 Y1 COM1 Y0 COM2 Y1 COM3 Y2 COM4 Y3
汇点式
分组式
分隔式
Date: 2014-4-8
Page: 12
CH12 PLC用于模拟量和位置控制
Date: 2014-4-8
Page: 13
模数转换 (A/D、AI)
数字信号 0~4095 0~1023 ……
端口 (地址)
数字信号 0~4095 0~1023 ……
工程化转换
工程量 0~100℃ ?~??kPa ……
CPU
软件实现
硬件滤波 如:RC滤波
软件滤波 如:中值滤波 软件RC滤波 ……
Date: 2014-4-8
Page: 4
CH12 PLC用于模拟量和位置控制
Date: 2014-4-8
Page: 28
CH12 PLC用于模拟量和位置控制
A73CPU位置控制系统原理图
Date: 2014-4-8
Page: 29
CH12 PLC用于模拟量和位置控制
作业布置: 练习册:
Date: 2014-4-8
Page: 30
CH12 PLC用于模拟量和位置控制
二、位置控制
◇
位置控制是对工位的控制,可由位置控制模块实 现.PLC系统可作为整个位置控制系统中的一个控制环节, 配上伺服放大器或驱动放大器,就可以将位置控制功能 和逻辑控制、顺序控制等一揽子解决。
Date: 2014-4-8
Page: 14
CH12 PLC用于模拟量和位置控制
◇
利用PLC模块实现位置控制的优点:
1、在实现位置控制的时候,可充分利用PLC系统的 硬件和软件资源。更便于在柔性制造系统( FMS)、计 算机集成制造系统(CIMS)或工厂自动化(FA)系统中 大量应用位置控制。 2、用户可根据自身要求灵活配置系统,既降低成本, 又能因地制宜。 3、可靠性高,维护方便。
Page: 25
CH12 PLC用于模拟量和位置控制
2.A系列的运动控制模块
(1)位置控制功能模块AD71和AD72
位置控制功能模块AD71和AD72是一种高精度定位智 能化定位模块。 AD71与AD72的主要区别在于AD71没有偏差计数器与 D/A变换这两个环节。
Date: 2014-4-8
Page: 26