基于图像分类的下一代速度类测试解决方案
人工智能图像处理技巧
人工智能图像处理技巧图像处理是人工智能技术中的重要应用领域之一,通过算法和模型的应用,可以对图像进行自动分析、识别和处理。
本文将介绍几种常见的人工智能图像处理技巧,包括图像分类、目标检测、图像生成等方面的应用。
一、图像分类图像分类是将图像分到不同的类别或标签中,这在很多领域都有着广泛的应用,如医学影像诊断、自动驾驶、安防监控等。
在人工智能领域,图像分类问题通常使用卷积神经网络(Convolutional Neural Network,CNN)进行处理。
CNN是一种专门针对图像处理的神经网络架构,它通过多层的卷积层、池化层和全连接层进行图像特征提取和分类。
其中,卷积层可以学习到图像的局部特征,池化层可以减少特征的维度,全连接层则进行最终的分类决策。
通过反向传播算法训练CNN的参数,可以实现对不同类别图像的准确分类。
二、目标检测目标检测是指从图像中检测出物体的位置和种类,它与图像分类类似但更加复杂。
在人工智能图像处理中,目标检测问题通常使用一种称为区域卷积神经网络(Region-based Convolutional Neural Network,R-CNN)的方法进行处理。
R-CNN首先通过选择性搜索(Selective Search)等算法,生成一些候选区域,然后对每个候选区域进行特征提取并使用分类器进行分类,最后通过回归算法进行位置精调。
这样可以实现对图像中多个物体的准确检测和定位。
三、图像生成图像生成是指通过人工智能技术生成具有一定视觉效果的图像,例如艺术风格迁移、图像生成模型等。
其中,艺术风格迁移是指将一幅图像的内容与另一幅图像的艺术风格进行结合,生成具有融合风格的新图像。
在人工智能图像处理中,艺术风格迁移通常使用生成对抗网络(Generative Adversarial Networks,GANs)进行处理。
GANs由生成器和判别器组成,生成器负责生成新图像,判别器负责区分生成的图像和真实图像。
基于灰度变化后阈值分割的丝带检测

基于灰度变化后阈值分割的丝带检测杨永杰;陈香;唐钰婷;包志华【摘要】在丝带的生产过程中,要求对丝带的边缘进行检测以保证丝带的宽度一致.找出丝带中存在的卷边等现象,能有效地提高丝带生产的效率和质量.根据丝带图像自身的特点,分析出丝带背景对边缘的影响,在对图像进行灰度变换之后,用Otsu阈值分割法得到阈值,将该阈值作为Canny算子高门限进行丝带边缘检测.用灰度变换对丝带图像的像素范围进行线性变化,使得Otsu阈值分割法得到的阈值满足Canny算子实现边缘检测的要求.将该算法运用在丝带边缘检测系统中,达到了很好的检测效果,并且由于该改进的算法运算简单,检测速度能满足系统的要求,也实现了丝带检测系统的智能化.【期刊名称】《丝绸》【年(卷),期】2013(050)009【总页数】5页(P36-40)【关键词】图像分割;Otsu算法;Canny算子;灰度变换;丝带检测【作者】杨永杰;陈香;唐钰婷;包志华【作者单位】南通大学电子信息学院,江苏南通226019;南通大学电子信息学院,江苏南通226019;南通大学电子信息学院,江苏南通226019;南通大学电子信息学院,江苏南通226019【正文语种】中文【中图分类】TP391.9目前国内外的检测系统中,关于丝带检测的实际应用系统很少。
为达到丝带检测的效果,丝带检测系统可以借鉴现有的布匹瑕疵、药理等方面的检测系统,找出合适的丝带检测算法。
丝带卷边的检测,是基于已有的丝带检测系统中新增的检测要求,图像是在有高强度光源和白色背景的条件下采集的,图像中像素值集中并且变化幅度不大。
为实现丝带的卷边检测,采用灰度变化改变像素的区间,再用Otsu阈值分割法找出图像的阈值,作为Canny算子的高阈值进行丝带边缘检测。
相比其他的检测算法,Canny算子[1-3]因为其对边缘提取更精确而在实际应用中被广泛使用,其高阈值的选择也至关重要。
常用的阈值选取方法多达数10种,应用较多的有:灰度直方图波谷法,极小值点阈值法,Otsu 方法[4-6]及最优阈值[7]等。
基于序列下视图像的无人飞行器速度精确测量方法
第36卷,增刊红外与激光工程2007年9月、吼.36Suppl em如t1nm m m锄d I as er Engi n∞曲g S e p.2007基于序列下视图像的无人飞行器速度精确测量方法张小苗,雷志辉,孙祥一,于起峰(国防科技大学航天与材料工程学院,湖南长沙410073)捕要:为了实时、高精度地获得无人飞行器的飞行地速,提出了基于序列下视图像的无人飞行器速度精确测量方法。
采用该方法的系统主要由安装在飞行器底部下视单目摄像机和机载D S P实时信息融合处理模块组成,同时需要由系统外输入飞行器当前的姿态和高度信息。
在对连续图像的识别跟踪基础上,可以得到飞行器的瞬时速度。
为了进一步提高速度的测量精度,可对一定时间段内的速度进行统计处理。
数值仿真实验结果证明,方法简单易行,速度测量精度较高。
关键词:速度测量;单目视觉;特征匹配;姿态;高度中圈分类号:TP391文献标识码l A文章编号:1007.2276(2007)增(探测与制导).0495.04A cc ur a t e V el oci t y m e asur em ent of unm anned aer ocr af tl1J●■11●■●●D aSen0n SeqU ennal d0W nW ar d100K l ng l m ageSZ H A N G)(i a o-I I l i ao,LE I Z hi4l ui,SU N)(i aI l g-yi,Y U Q i一五啪g(c‘dl铅e of Aer邯pace柚d M ater ial Engi ll∞r ing,N al ional U ni vef si哆of D e f cn∞1khnol ogy'Ch粕gsha4100r73,Q I ina)A bst阳ct:I n or d er t o m e asur e t ll e gm un d s雕埘w i m r e al t i m e a11d m gh pr eci si on,t l l e m et l l od ofacc um t e V el oc i t y m ea sur e m e nt of um nanned aer ocm f t bas ed on s equent i al dow nw ar d l ook i ng i m ages is pr opos ed.T he sys t em adopt i ng t hi s m em od is c onsi st of t w o pans:one is t Il e do w nw a r d l ook i ng s i ngl ec锄e r a f i xed on t l le bono m of ae rocr aft,血e ot t l er is t lle m odul e of ai r bom e D S P us ed t oprocess f us i oni nfo姗at i on.I Il吐l e m eaI l w l l i l e,m e hei ght and at t i t ude i s ne甜ed’w l l ich i s i I l pu仕e d f r om out of tl l e syst em.T he i ns t aI l t aI l eo us V el oc i t y can be cal cul at ed bas ed on m e i m a ge r ecogIl i t i on aI l dⅡ.ac kj hg.F or i m pr0V i ng m e pre c i s i on m or e,t l l e st at i st i c pr oces s coul d be cam ed on.T he num er i ca l s i m ul at i on exper i m ent r e sul t s sh ow m at tl l e w ay is eas y t o re al i z e and t量le pre c i s i on of m easur er nent i s t li班.K ey w o“l s:V色l oc埘rneasur em em;M onocul a r vi si on;Feat l l r e m a t ch;A t t i t I l de;A I t i m deO引言随着现代光电技术的发展,将其作为关键技术的无人飞行器技术也得到了长足的发展。
一种通过图像处理的实时车速计算改进模型

Computer Era No. 10 2019
DOI:10.16644/33-1094/tp.2019.10.008
一种通过图像处理的实时车速计算改进模型
罗博峰
(武汉理工大学,湖北 武汉 210012)
摘 要:车速检测是保证交通安全的重要手段。动态特征速度检测可以有效地分析汽车驾驶特性和交通流,有助于开发
(Wuhan University of Technology, Wuhan Hubei 210012, China)
Abstract:Speed detection is an important means to ensure traffic safety. Dynamic feature velocity detection can effectively analyze the driving characteristics and traffic flow of automobiles, which is helpful to the development of intelligent transportation system. Radar velocimeter and laser velocimeter are relatively high in cost and not accurate enough, and can only measure the instantaneous speed. Therefore, an image based fast speed detection method with vehicle feature point recognition is proposed. Firstly, the feature point on the vehicle is filtered out and tracked by a certain tracking method. Then the obtained images are transformed by inverse perspective and the actual speed is worked out through a certain proportion relationship. The system realizes the real-time detection of vehicle speed and is helpful to the research of intelligent transportation system. Key words:image processing;real-time tracking;fast detection;vehicle speed recognition
如何优化图像识别系统的响应速度(八)

随着人工智能和大数据技术的不断发展,图像识别系统已经广泛应用于各个领域,包括医疗、安防、自动驾驶等。
然而,随着数据量的不断增加,图像识别系统的响应速度也成为了一个重要的挑战。
本文将讨论如何优化图像识别系统的响应速度,以提高其实时性和效率。
一、数据预处理在进行图像识别之前,首先需要对图像数据进行预处理。
预处理步骤可以包括图像去噪、尺寸调整、灰度化、直方图均衡化等。
通过将图像数据进行预处理,可以减少冗余信息,提高后续处理的效率。
二、算法优化图像识别系统通常采用深度学习算法,如卷积神经网络(CNN)。
为了提高系统的响应速度,可以尝试对算法进行优化。
一种常见的优化方法是模型剪枝,通过去除冗余的连接或节点来减少模型的参数量。
此外,还可以使用轻量级的网络结构,例如MobileNet和ShuffleNet 等,以减少计算量并提高速度。
三、硬件升级除了对算法进行优化外,还可以考虑升级系统的硬件设备。
例如,可以使用图形处理器(GPU)来加速计算速度,因为GPU在并行计算方面有很强的性能优势。
另外,也可以考虑使用专用的硬件加速器,如Tensor Processing Unit(TPU)和Field Programmable Gate Array (FPGA),它们可以提供更高的计算效率和更快的速度。
四、分布式计算随着数据量的不断增加,单一的计算设备可能无法满足图像识别系统的需求。
因此,可以考虑采用分布式计算的方式来提高系统的响应速度。
分布式计算可以将数据分配到多台计算设备上进行处理,并通过并行计算的方式加快处理速度。
同时,还可以通过数据并行和模型并行的方式来提高系统的吞吐量。
五、缓存优化在图像识别系统中,数据的读取和存储通常是一个耗时的过程。
为了减少IO操作的开销,可以采用缓存技术来提高系统的响应速度。
常见的缓存技术包括内存缓存和磁盘缓存。
通过将经常使用的数据存储在高速缓存中,可以减少IO操作的次数,从而提高系统的效率。
基于 CNN-SVM-GA 的图像分类系统的设计与实现代码大全
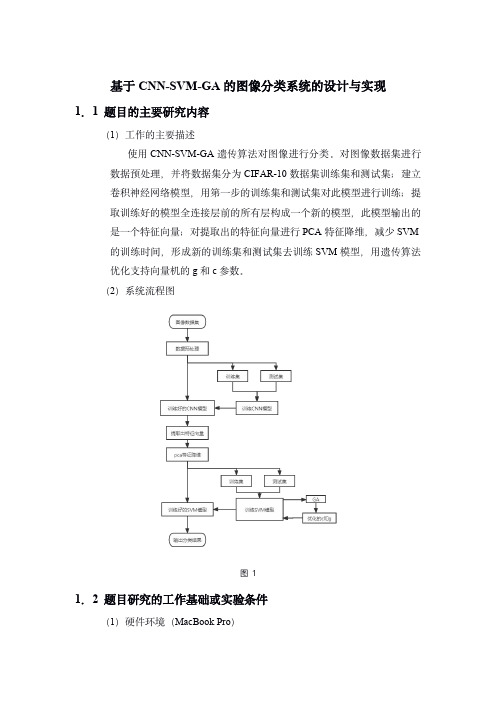
基于CNN-SVM-GA的图像分类系统的设计与实现1.1题目的主要研究内容(1)工作的主要描述使用CNN-SVM-GA遗传算法对图像进行分类。
对图像数据集进行数据预处理,并将数据集分为CIFAR-10数据集训练集和测试集;建立卷积神经网络模型,用第一步的训练集和测试集对此模型进行训练;提取训练好的模型全连接层前的所有层构成一个新的模型,此模型输出的是一个特征向量;对提取出的特征向量进行PCA特征降维,减少SVM的训练时间,形成新的训练集和测试集去训练SVM模型,用遗传算法优化支持向量机的g和c参数。
(2)系统流程图图11.2题目研究的工作基础或实验条件(1)硬件环境(MacBook Pro)(2)软件环境(pycharm,python3.9)1.3理论基础(1)卷积神经网络(CNN)卷积神经网络(CNN)是典型的前馈神经网络,由输入层,隐藏层和输出层组成。
隐藏层由卷积层,池化层和全连接层组成。
卷积模拟单个神经元对视觉刺激的反应。
它使用卷积层卷积输入数据,然后将结果传输到下一层。
卷积层由一组卷积核组成。
尽管这些内核具有较小的感知视野,但是内核延伸到输入数据的整个深度。
卷积运算可以提取输入数据的深层特征。
卷积神经网络通过卷积、池化等操作可以实现特征的自动提取,再通过全连接层实现分类。
卷积神经网络的结构:一般地,卷积神经网络由输入层、卷积层、RELU层、池化层和全连接层构成,通过梯度下降的方式训练网络模型的参数,从而实现分类。
下面将对每类层进行介绍。
卷积层。
卷积神经网络的核心功能(特征提取)由卷积层完成。
卷积层由许多可学习的卷积核(滤波器)构成,滤波器按照一定的步长对输入的张量进行遍历,当遇到某些类型的形状特征时就激活。
池化层。
池化层又可称为下采样层,通过池化操作可以减少特征图的参数量,减少运算量。
池化层对每个通道的特征图进行操作,不改变通道数,但减少每个通道的特征图的大小。
常用的池化操作有均值池化和最大池化。
基于灰度均值的自适应FAST角点检测优化算法
基于灰度均值的自适应FAST角点检测优化算法
刘艳;李一桐
【期刊名称】《电光与控制》
【年(卷),期】2024(31)2
【摘要】光照不均、突变引起的灰度变化会影响图像特征检测效果。
为此,设计一种基于灰度均值的自适应FAST-9-12角点检测算法。
首先,利用特征点的延展性设计一种小面积双重检测模板,减少像素点与中心点的比较次数,提高区域正检率和检测速度;其次,依据图像局部灰度均值,在每个像素点检测模板内自适应调整阈值,避免灰度变化影响检测效果;最后,根据柔性非极大值抑制的思想设计角点半径抑制原则,筛选鲁棒性更强的角点。
在Inria遥感影像数据集上的实验结果表明,FAST-9-12角点检测速度比FAST-12-16,FAST-9-16两种模板提高22%左右,因自适应阈值的提取方式不易受光照影响,检测准确率分别提高4.16和3.11个百分点,实现了图像特征快速和精准检测。
【总页数】8页(P65-71)
【作者】刘艳;李一桐
【作者单位】大连大学信息工程学院;大连大学大连市环境感知与智能控制重点实验室
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于自适应惯性权重的均值粒子群优化算法
2.基于k-均值的自适应PSO优化算法
3.基于均值的云自适应鸟群优化算法
4.基于区域灰度变化的自适应FAST角点检测算法
5.一种改进的自适应FAST角点检测算法
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于图像处理的高精度自动线宽测量方法
P B的制作 朝着 多层化 和密 集 化 发展 , 多层板 是将 每 C
一
麻 烦 ,效 率 低 ,所 以使 用 较 少 ;某 些 自动 光 学 检 测
仪 ( AOI )也 具 有 测 量 线 宽 的功 能 ,但 是 其 精 度 一 般 达 不 到要 求 。
印制 电 路信 息 2 1 . 0 1No5
一
种基于图像处理的高精度 自动线宽测量方法
盒 正动P矩验 摘业线5线 要甘广0选 (辉文,果 路的东通, 文有 获经 广内精过的 部的在形 章自莞取线 东限确 宽 分公c 测 提吴定框 ,像嗽 定 出伟2 量 对司3 被 —钦位 结 科宽线 测 种,7 量 该测图 技龙路 矩处) 高量像 股东 形理缘 精方中 明庆边 框 度, 份法 图 进 行
( 图4 ,或者 形成 一个 浅沟 ( 图5 如 ) 如 )。
( ) 如果 被 测 线 颜 色 是 暗 色 , 则在 形 成 灰 度 图 3 时 , 中 间部 分 形 成 渠 道 , 两边 缘 是 小渠 道 、缓 坡 或
者 突起 ,如 图4 图5 扣 过来 一样 、 倒
( )在 图像 的前景或 背 景 ( 上或者 基材 ) 4 线
一
般 ,在 较 高 环 形光 源 情 况 下 ,C D 像 后 转 C 成
A B
C D
换 成 灰度 图的灰 度 组 成 结构 如 图6 ,整个 图像灰 度 等
级 分 成 三 部 分 :C 线 路 表 面 区域 ,B、D为线 路 毛 为
图2 P 线路截面 简单示意图 CB
边 区 域 ,A、E 为基 材 区域 。 以上 三个 区 域 可 能 因线
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
问题2:局限性
没有合适的标志物
聚类与分类
• 有无监督? • 结果可控? • 人工成本?
聚类与分类
train
MODEL
stage1
stage2
聚类与分类
问题:局限性
无法判定变化的过程
三大痛点
•ቤተ መጻሕፍቲ ባይዱ类别关联
stage1
• 变化过程
基于图像分类的 下一代速度类测试解决方案
目录
从启动速度开始 改进,与改进的改进 告别摄像头 现在与未来
从启动速度开始
• 核心指标 • 应用范围广 • 过程简单 • 人力消耗
传统做法:日志埋点
传统做法:视频数帧
常见改进方案
• 目标检测 • 图像聚类 • 图像分类
目标检测
目标检测
问题1:效率 or 准确?
问题2:渐变
• 单一指标难以应对
多指标配合来处理复杂的情况 数据决定了算法的上限
分类器:阶段 & 类
• 类级别操作 • 可定制性 • 后续可用性
stage1 stage2 stage3 class1 class2 class1
性能与优化
• 分辨率 • 阶段数 • 预加载
效果
变化过程
图表
天然跨端
… 跨任意端
落地方式 1.0
设备
摄像机
stagesepx
报告
为什么还是用了摄像头?
摄像头的意义
安全、稳定
“不够准确的”软件录制
• Opencv假设了你的视频fps是稳定的 • 但实际上并不是 • 前提错误,结论必然有问题
误差根源
并不均匀
误差根源
如何消除
效果比较
Camera
Software
stage1 stage2 stage3stag? e3 4
stage
• 人工采集成本
stage2
stage1
stage2
stagesepx
时间推移
时间与视频
视频是一组带时间戳图片的集合
切割器:阶段与变化
找到帧之间的联系
问题1:区域与变化
如何分辨 大面积的细微变化 与 小面积的突变? 矩阵拆分,单一指标成为一组数据
• Camera:4.00 – 1.66 = 2.33 • Software:5.43 – 3.13 = 2.30
如何落地 2.0
设备
ffmpeg
stagesepx
报告
半自动化与全自动化
无人值守
人工干预
哪个是最佳实践? 都有可能,先权衡成本!
半自动化
少量人工操作成本+少量开发成本 达到 好的效果
全自动化:确保阶段与预期一致
Stage 1
与自目定标义检训测练结集合
如何落地3.0
半自动化 全自动化
灵活需求 高频回归
规划与定位
兼容 速度
功能
SDK
ONE MORE …
• 社区:做公司做不到的事情 • 开源:普适性与稳定性 • 方向:DevOps • 发展:需求权衡
谢谢聆听!