阵列感应信号处理浅探
阵列信号处理原理、方法与新

阵列信号处理原理、方法与新
阵列信号处理是一种利用多个传感器(如麦克风、天线等)获取信号,通过信号处理
算法将其合成为一个复合信号,并在此基础上分离、定位、去除、增强等操作的新型信号
处理技术。
在目前的通信、雷达、声学、医学等领域都有广泛应用。
阵列信号处理的基本原理是通过获取多个传感器采样的信号,根据它们的相对位置和
接收到信号的时间差异,构建一个信号阵列,然后通过信号合成的方法将这些信号合成为
一个复合信号。
根据复合信号的特征,进行后续的信号处理。
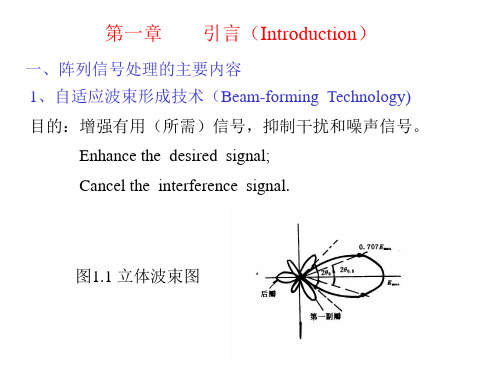
阵列信号处理的主要方法包括波束形成、空间滤波、方向估计等。
波束形成的主要目
的是聚焦探测器的接收能力,使其在目标方向上获得更高的灵敏度。
空间滤波的主要目的
是通过利用阵列传感器之间的相对位置和互相之间的传感器响应差异,对信号进行滤波,
达到抑制噪声、增强信号等效果。
方向估计则是通过对信号在阵列中传播的速度和波束方
向的监测,对信号的方向进行估计。
阵列信号处理技术的应用十分广泛,其中最为常见的应用领域是通信、雷达和声学等。
在通信中,利用阵列信号处理技术进行信号增强和去除干扰,并根据信号的传播速度和方
向进行信号定位和跟踪。
在雷达中,利用阵列信号处理技术对雷达信号进行波束形成和目
标方向估计,提高雷达的探测效率和目标定位精度。
在声学中,利用阵列信号处理技术进
行声波信号的定位、分离和降噪等操作,提高语音识别和音频娱乐的质量。
总之,阵列信号处理技术是一种高效、可靠的信号处理方法,可以广泛应用于各个领域,有着十分重要的实际应用价值。
阵列感应—讲课
原状 过 渡 冲 洗 井 地层 带 带 眼
r1 di r2
冲 洗 过 渡 原状 带 带 地层
地质应用
地层侵入特性描述
如果泥浆滤液电阻率Rmf小
地 层 电
于地层水电阻率Rw,对于油气层
阻 率
和水层深探测电阻率均小于浅探
Rxo,n-1 Rxo,n Rxo,n+1
Borehole Lxo,n-1
Rt,n-1
Rm BHD
Lxo,n
Rt,n
Lxo,n+1
Rt,n+1
测井条件
阵列感应测井不能取代侧向测井,它与双侧向测井互为补充,分别适 应不同的测井条件。阵列感应测井适应的测井条件一般为: • 中、低电阻率地层; • 相对较高的泥浆电阻率。由感应测井原理可知,如泥浆电阻率太低,对 测 量 结 果 影 响 较 大 ; 如 Rt/Rxo 很 大 , 则 高 度 聚 焦 的 感 应 测 井 曲 线 会 出 现 “洞穴效应”。
真分辨率聚焦组合:在软件聚焦时,对具有不同探测深度阵列测量的 数据进行一系列聚焦滤波及组合,得出一组具有固定探测深度的曲线, 即聚焦合成曲线。
纵向分辨率匹配:将浅探测的曲线特征组合到深探测曲线时,浅探测 信号的平均影响被消除,这样既没有改变深探测曲线分辨远离井眼地 层的电导率变化的能力(探测深度未变),又使得其纵向分辨率与浅 探测曲线匹配,得到相同的视纵向分辨率,形成“分辨率匹配曲线”。
Rmf=Rw
地质应用
识别储层流体性质
当地层水电阻率明显 小于泥浆滤液电阻率(即
Rmf/Rw >2)时,自然电位
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
阵列感应
曲线探测深度(in) 10、20、30、60、90 精度 ±0.7ms/m 或±2%
10、20、30、60、90、120 10、20、30、60、90、120 ±1ms/m 或±2% ±1ms/m 或±4%
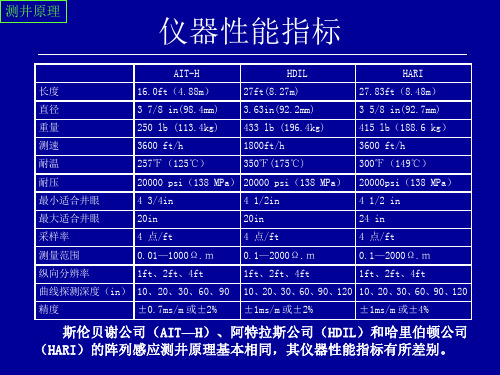
斯伦贝谢公司(AIT H)、阿特拉斯公司 HDIL) 阿特拉斯公司( 斯伦贝谢公司(AIT—H)、阿特拉斯公司(HDIL)和哈里伯顿公司 HARI)的阵列感应测井原理基本相同,其仪器性能指标有所差别。 (HARI)的阵列感应测井原理基本相同,其仪器性能指标有所差别。
测井原理
仪器性能指标
AIT-H HDIL 27ft(8.27m) 3.63in(92.2mm) 433 lb (196.4kg) 1800ft/h 350℉(175℃) HARI 27.83ft(8.48m) 3 5/8 in(92.7mm) 415 lb(188.6 kg) 3600 ft/h 300℉(149℃) 20000psi(138 MPa) 4 1/2 in 24 in 4 点/ft 0.1—2000Ω.m 1ft、2ft、4ft 16.0ft(4.88m) 3 7/8 in(98.4mm) 250 lb (113.4kg) 3600 ft/h 257℉(125℃)
阵列感应 测井资料处理
资料处理
基本处理
预处理: 预处理:消除原始数据记录中的单个坏点和校正在测量过程中由于温 度变化引起的测量结果偏差。 趋肤效应校正: 趋肤效应校正:响应信号被在发射器、地层环及接受器之间的导电地 层减弱、延迟,这种现象通常被称为“趋肤效应”。使用趋肤效应校 正可以减少其影响。 井眼环境校正: 井眼环境校正:对泥浆电导率、井眼尺寸的影响校正。 真分辨率聚焦组合: 真分辨率聚焦组合:在软件聚焦时,对具有不同探测深度阵列测量的 数据进行一系列聚焦滤波及组合,得出一组具有固定探测深度的曲线, 即聚焦合成曲线。 纵向分辨率匹配: 纵向分辨率匹配:将浅探测的曲线特征组合到深探测曲线时,浅探测 信号的平均影响被消除,这样既没有改变深探测曲线分辨远离井眼地 层的电导率变化的能力(探测深度未变),又使得其纵向分辨率与浅 探测曲线匹配,得到相同的视纵向分辨率,形成“分辨率匹配曲线”。 合成双感应曲线、 合成双感应曲线、倾角校正
第四章 阵列信号处理

通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
[论文]阵列信号处理实验报告
![[论文]阵列信号处理实验报告](https://img.taocdn.com/s3/m/f846eb3caf45b307e8719749.png)
作业一 在球坐标系下推导平面波表达式球面波波动方程:22222222()E E x y z tεμ∂∂∂∂++=∂∂∂∂ 将直角坐标与球坐标的关系带入得到:22222222221111()(sin )sin sin s s sr r r r r r c tθθθθθϕ∂∂∂∂∂∂++=∂∂∂∂∂∂ 应用球面波方程一般都是球对称的,简化为:2222211()s sr r r r c t∂∂∂=∂∂∂ 经过变化,可得:222221rs rsr c t ∂∂=∂∂ 该方程的一个解为:exp[()As j t kr rω=- 同样有如下关系:/k c ω=根据平面波的定义,在球坐标系下,单频平面波的表达式为:(,)exp[()]As r t j t k r rω=-⋅作业二对于有限孔径的感应器,某一感应器接收的信号可以表示为:(,)()(,)z x t w x f x t =其中()w x 为窗函数。
通过空间傅立叶变换可得:()()exp()W k w x jk x dx ∞-∞=⋅⎰(,)(,)exp[()F k f x t j t k x dxdt ωω∞∞-∞-∞=--⋅⎰⎰对接收信号(,)z x t 进行傅立叶变换:()()()()[]()()()(){}()(),,exp[(),exp exp ,exp ,exp exp ,exp exp o Z k z x t j t k x dxdtw x f x t j t jk x dxdtw x F x jk x dxw x F l jl x dl jk x dx w x F l jl x jk ωωωωωω∞∞-∞-∞∞∞-∞-∞∞-∞∞∞-∞-∞∞∞-∞-∞=--⋅⎡⎤=-⋅⎣⎦⎡⎤=⋅⎣⎦⎡⎤⎡⎤=-⋅⋅⎣⎦⎣⎦⎡⎤=-⋅⋅⎣⎦⎰⎰⎰⎰⎰⎰⎰⎰⎰()()(){}()(),exp ,x dldxF l w x j k l x dx dlW k l F l dlωω∞∞-∞-∞∞-∞⎡⎤⎣⎦⎡⎤=-⋅⎣⎦=-⎰⎰⎰ 其中,()()[],,exp o F x f x t j t dt ωω∞-∞=-⎰。
阵列信号处理

阵列信号处理是信号处理的一个年青的分支,属于现代信号处理的重要研究内容之一,其应用范围很广,可用于雷达、声呐、通信、地震勘察、射电天文和医用成像等众多领域。
阵列信号处理是将一组传感器在空间的不同位置按一定规则布置形成的传感器阵列(尽管采用的传感器的类型可以不同,如天线、水听器、听地器、超声探头、X射线检测器,但是传感器的功能是相同的,它是连接信号处理器和感兴趣的空间纽带),用传感器阵列发射能量和(或)接收空间信号,获得信号源的观测数据并加以处理。
阵列信号处理的目的是从这些观测数据中提取信号的有用特征,获取信号源的属性等信息。
目前,阵列信号处理在雷达及移动通信等领域有着广泛而重要的应用。
在相控阵雷达体制中,自适应波束形成技术在抑制杂波干扰方面起着关键的作用。
在移动通信中,基于阵列信号处理的波达方向估计技术,使移动通信进入一个崭新的阶段。
本论文首先介绍阵列信号处理的基础知识。
在此基础上,着重讨论阵列波束形成技术,非理想线性阵列的雷达信号波达方向和多普勒频率估计,均匀圆形阵列的信号波达方向估计和复杂信号的波达方向及参数估计等四方面内容。
这些内容都是阵列信号处理领域的研究热点。
它们无论对阵列信号处理的理论发展还是实际应用,都有重要的意义。
目前,人们普遍关注在阵列响应矢量未知情况下,自适应波束形成问题,即盲自适应波束形成技术。
本文第一方面介绍了最基本的阵列波束形成方法,即最小均方误差波束形成器,线性约束最小方差波束形成器和基于特征空间的波束形成器(ESB)。
在此基础上,提出一个基于特征空间的盲自适应波束形成算法。
此算法首先根据高分辨波达方向估计方法,估计信号源的波达方向,然后以此方向形成约束导向矢量,进而计算出ESB波束形成算法的最优权矢量,最后,对期望目标形成笔状波束。
此算法能够有效地抑制信号的对消现象,并且能够应用于在波束中有多个期望信号的场合。
当阵列存在各种误差时,一般高分辨波达方向估计方法(如MUSIC)的估计性能严重下降。
阵列信号处理的基本知识分析
diag{g ej1 ,, g e } jM
1
M
阵元之间的互藕 有关因素:阵元之间的间距大小,系统工作 频段,采用的传感器类型等。 设所有阵元之间的藕合系数矩阵为C,则考 虑到阵元间互藕的阵列输出信号模型为:
x(t) CAs(t) n(t)
阵元位置 阵元测向的关键信息是空间信号入射到各阵 元的相对延迟相位,而这一相位依赖于阵元 之间的空间位置,阵元位置误差直接导致延 迟相位估计误差,从而影响信号参数估计。
信号参数估计(DOA,频率,极化参数,距离, 时延等): 谱估计方法(子空间方法,波束形成 方法),参数化方法(最大似然,基于子空间逼 近方法)。
Ref[1] H.krim and M.Viberg, Two decdees of array processing research: the parametric approach, IEEE signal processing Magazine, Vol.13, Vol.4, 1996. Ref.[2] D.H.Johnson, D.E.Dudgeon, Array signal processing, Prentice-Hall,1993. Ref.[3] IEE Proc. 1991. Ref.[4] Vaccaro, R.J, The past, present, and the future of underwater acoustic signal processing, IEEE Signal Processing Magazine, Vol.15 , No.4 , 1998.
-25
-30
-35
-40
-45
-50
-80 -60 -40 -20
0
20
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L 1 , z 2 2L L 8 z 2, z 2
z 令, = L
图 2 纵向微分几何因子
可以看出, 在发射线圈与接受线圈之间的地层对视电导率的贡献值最大,而 在此以外的地层的贡献按 1
z2
规律递减, 纵向微分几何因子决定纵向分辨能力的
大小。为了提高纵向分辨能力,我们要求 gr 上的峰窄且高,这就要求缩小线圈 间距L。 4.2.3.双线圈系总微分几何因子 Doll 总微分几何因子表达式如下:
+∞ +∞
������ =
−∞
������������������ =
−∞
������ ������������ ������������ ������ [������������ + (������ + ������)]������ ������ + [������������ + (������ − ������)]������ ������
影响,如井眼、泥浆电阻率、井眼形状、地层电阻率等。而当浅向响应值的变化 又会通过分辨率匹配对深向响应值产生影响。
5.2.真分辨率聚焦的实现
P ( k , z )
n j 1 z jk zmin
zmax
jk ( z jk , ) aj (r , z z jk )
对于任一电导率为 的地层, 通过调整权函数 jk ( z, ) , 可以在 z [ zmin , zmax ] 的所有子阵列的测量值合成同一纵向深度,不同径向深度上的新的测量值,故称 为数字聚焦处理。 令目标函数为 t (m, n) 将上式离散化,
2
0
m n j tr (r ) Re g r (r ) jk dz j 1 k 1
2
t z ( z ) , tr (r ) 是目标函数 t (r , z ) 的纵向和径向特征分量, gzj ( z) , grj (r) 是三线圈系
R j S jT 的纵向微分几何因子和径向微分几何因子。 2 和 2 分别表示仪器的纵向和径
0
2
图 1 横向微分几何因子
可以看出,当 很小时, gr 几乎随 直线上升,当 在 0.45 左右是, gr 达到极大 值,其后 gr 随 逐渐变小,最终趋于 0 。由于 gr 在 =0.45 处取得极大值,
r L 0.45L ,为增加横向探测深度就必须使线圈间距 L 增大。
t (r , z )
另有两种误差平方:
1 2
exp(
(r r0 )2 ( z z0 )2 ) 2 2 2 2
2
m n t z ( z ) Re jk g zj ( z z jk ) dz j 1 k 1 2
g (r , z ) Re jk g j (r , z z jk )
j 1 k 1
n
m
在子午面 (r , z ) 的某些区域取得极大值。故令
t (r , z ) Re jk g j (r , z z jk )
j 1 k 1
n
m
要使上式在子午面上对所有点都成立式不可能的, 因为子午面上的点是不可 数的无穷,而复的 jk 和 z jk 最多只有 3mn中选择,方程是超定的。故退而求其次,令:
2.3 高分辨率阵列感应测井仪器优势
高分辨率阵列感应(HDIL)与常规 1530 感应除了线圈系的区别外,其最大 的不同之处在于记录的是 7 组实部和 7 组虚部原始的相信号, 为后续处理保留了 最原始的数据。 三线圈系结构没有硬件聚焦性能, 其纵向响应曲线呈不对称形状, 因此高分辨率阵列感应测井采用“软件聚焦”,即用数学方法对原始测量数据进
其中, g 为几何因子, L 为线圈间距, r 为径向极坐标, T 为发射线圈到测量点 距离, R 为接收线圈到测量点距离。 而视电导率与几何因子的关系如下:
a
0
g drdz
其中, a 是视电导率, 地层微元环电导率。微分几何因子类似于数理统计中 的概率密度, 而视电导率则相当于地层微元环电导率的期望,即视电导率是地层 微元环以几何因子为权重函数的加权平均值。 4.1.1 双线圈系横向微分几何因子 将������对������求积分, 即得出横向微分几何因子, 它能说明线圈系的横向探测特性, 即井筒、侵入带、原状地层对视电导率的贡献的大小。
向特性,总的优化目标函数是:
min{ 2 2 2 }
约束条件为:
j 1 k 1nmjk1当纵向分辨率极高时,如纵向分辨率为 1ft,总目标函数中 必须取极大值, 而为使总目标函数取得极小值, , 就必须取尽可能小值,这样求得的二维
g(r , z ) 不尽人意。纵向分辨率高时,阵列感应的浅向响应更容易受井筒周围环境
5.1 真分辨率聚焦的数学原理
阵列感应三线圈系 R j S jT 构成阵列感应线圈系的一个基本单元,它的复响应 是构成总响应的“基函数”,用 aj 表示,线圈系的总响应应按下式计算:
a Re jk aj ( z z jk )
j 1 k 1
n
m
而权系数的确定就是使得总几何因子:
2.高分辨率阵列感应测井的基本原理及仪器
2.1 高分辨率阵列感应测井的基本原理
感应测井的基本原理是通过在发射线圈中加一个幅度和频率恒定的交流电 时, 发射线圈就能在井周围地层中感应出电动势,形成以井轴为中心的圆环状涡 流,其强度与地层的电导率成正比。涡流又会产生二次交变电磁场,在接收线圈 中又会产生感应电动势,该电动势的大小与涡流强度有关,即与地层的电导率有 关。 高分辨率阵列感应测井仪仍是以电磁感应原理为理论基础, 其线圈系基本单 元采用三线圈系结构(一个发射单元,两个接收基本单元)。它运用了两个双线 圈系电磁场叠加原理,实现消除直耦信号影响的目的。
2.2 高分辨率阵列感应测井仪器介绍
HDIL线圈系由七组基本接收单元(源距为 6~9 4 英寸)组成,共用一个发射 线圈,使用八种频率(1 0 KHz、30 KHz、50 KHz、70KHz、90 KHz、11 0 KH z、 130 KHz、150 KHz)同时工作,测量 112 个原始实分量和虚分量信号,通过多 路遥测短节, 把采集的大量数据传输到地面, 再经计算机进行预处、 趋肤校正等, 得出具有不同探测深度和不同纵向分辨率的电阻率曲线。 MIT线圈系由八个双侧布置的线圈子阵列组成,共用一个发射线圈;对每一 子阵列由一个发射线圈和两个接收线圈组成, 两个接收线圈由主接收和屏蔽线圈 组成。8 个子阵列共测量 28 个原始测量信号,28 个信号经过井眼校正、真分辨 率聚焦和分辨率匹配后得到 5 种探测深度( 10in、20in、30in、60in、90in )、 3 种不同纵向分辨率(1ft、2ft、4ft) 共 15 条曲线。
2 t (r , z ) Re jk g j (r , z z jk )
j 1 k 1 n 2
n
m
0
[t (r, z) Re
j 1 k 1
m
jk
g j (r , z z jk )]2 drdz
为使目标函数有极大值, t (r , z ) 有正态分布的形式:
4.1 微分几何因子
Doll在 20 世纪 40 年提出感应测井方法,与此同时还需要表征地层不同部分 对有用信号的贡献度,因此提出了Doll几何因子。假设地层均匀,把地层抽象成 由许多导电环路组成, 并不去考虑各个导电环路之间的相互影响。对于感应测井 双线圈系来说,Doll几何因子的表达式为:
g L r3 3 2 T3 R
3.阵列感应信号处理流程简介
在阵列感应的信号处理流程中,预处理通常包括解码、DFT变换(分离信号 实部与虚部)、温度校正等前期处理过程。预处理主要完成信号的前期处理,为 后续处理做好准备,将电压信号通过算法变为视电导率。
控制参数 输入 数据 预处理
趋肤效应校正
井眼校正
真分辨率聚焦
垂直分辨率匹配
径向反演
5.阵列感应的真分辨率聚焦
上面介绍了感应测井的理论以及几何因子理论, 可以知道想要只通过一个子 阵列得到理想的响应函数是不可能的, 采用阵列感应测井仪器包含了多个不同线 圈距的多个子阵列, 各个子阵列能够提供非常丰富的地层信息,通过把各个子阵 列的信息聚焦合成可以得到所需的理想结果,这就是阵列感应测井信号聚焦。 阵列感应测井信号聚焦的任务就是把几个子阵列的测量信息合成理想曲线 结果, 尽管从数学角度来看, 任何二维函数都可以处理成任意分辨率和探测深度 的函数,但是物理角度,是需要一定条件的。 通过前面介绍的几何因子理论可知, 感应测井当中所涉及的径向探测深度和 纵向分辨率是相互矛盾的。 要想同时满足高的分辨率和深的探测深度在物理上是 不可实现的。 为了给测井解释提供相同分辨率不同探测深度的曲线,必须利用真 分辨率合成技术。 信号的聚焦处理过程是整个阵列感应测井信号处理的重点部分, 通过信号聚 焦处理就可以得到不同垂直分辨率和不同径向探测深度的曲线, 信号聚焦对井眼、 侵入、围岩等影响的校正有非常重要的作用。
������ ������
积分结果:
gr 2 k [(1 k 2 ) K (k ) (k 2 1) E (k )] L
其中,
r L k 1 4 1
2
K (k )
0
2
d 1 k 2 sin 2 1 k 2 sin 2 d
,
K (k )
输出数据
地面信号处理的关键是对仪器测得的不同频率、 不同探测深度信号的趋肤效 应校正、井眼校正、真分辨率聚焦和垂直分辨率匹配,而信号校正、聚焦的基础 就是感应测井的几何因子, 下面就将介绍感应测井的几何因子的主要特征及其在 信号处理中的应用。