阵列信号处理知识点
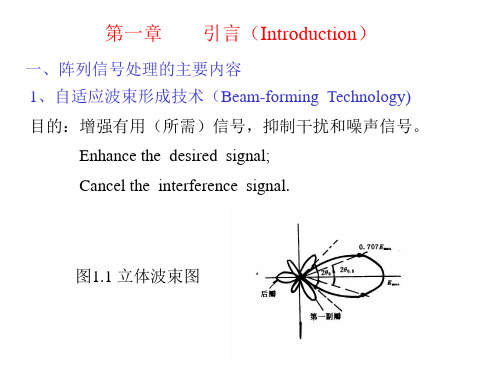
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
课件2:阵列信号处理数学基础

谱定理,也就是矩阵A的特征值分解定理,其中Λ diag( , , , ), E
1
2
n
[e ,e , ,e ]是由特征向量构成的酉矩阵。
1
2
n
•9
一、代数基础
Kronecker积
定义:p q矩阵A和m n矩阵B的Kronecker积记作A B,它是一个 pm qn矩阵,定义为
a B
11
x
(t)
s (t)e K
jwom ( i )
n
(t)
m
i1 i
m
s (t)为入射到阵列的第i个源信号 i
( )为第m个阵元相对参考点的时延
m
i
n (t)为第m个阵元的加性噪声 m
X (t) [x (t), x (t),, x (t)]T
1
2
M
矩阵表示接收信号 N (t) [n (t), n (t),, n (t)]T
f
f
Khatri Rao积具有如下一些性质:
A⊙(B⊙C) (A⊙B)⊙C
(A B)⊙C A⊙C B⊙C
A⊙B B⊙ A
•12
一、代数基础
Hadamard积
矩阵A 和B IJ IJ的Hadamard积定义为
向量化
a b 11 11
A B a b21 21
a bI1 I1
ab 12 12
1
2
t1 ,t2
E{n(t )nT (t )} 0
1
2
Outline
一、矩阵代数相关知识 二、信源和噪声模型 三、阵列天线统计模型 四、阵列响应矢量/矩阵 五、阵列协方差矩阵的特征值分解 六、信源数估计方法
•19
第四章 阵列信号处理

通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
阵列信号处理(知识点)

信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈称()()()()12,,,P span a a a θθθ 为信号子空间,是N 维线性空间中的P 维子空间,记为P NS 。
PN S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概率()12,,,N f X X X θ 最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X WHW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理-1

n = −∞
∑A
∞
n
exp[ jnω 0 (t − α ⋅ x )]
(2.15) 由以上分析可以得到如下结论:传播的电 磁波 ,无论其信号是何种形式,均满足波 动方程。且任意方向传播的电磁波可同时 存在。
1 T An = ∫ s(u) exp(− jnω0u)du T 0
球面波波动方程: 球面波波动方程:
第一章
绪论
信号处理研究的内容
信号处理主要 研究方向
从复杂环境中 提取有用信号
由检测到的信号中 提取信息
信号处理的发展
起源于17世纪 50年代前期 分离元件 速度低 体积大 可靠性差
速度高 体积小 可靠性高
60年代后期 集成电路
信号处理的发展
信号处理前期
信号处理后期
时域信号处理 (一维)
图像处理
波束形成;
窗函数; 阵列的形成; 数字波束形成等;
阵列处理方法;
抗干扰; 超分辨;
空间目标参数的获取和估计; 两大类: 空间滤波; 空间谱估计;
阵列信号处理的主要目的: 1)增加信噪比 空间采样; 空间滤波; 2)利用阵列信号处理,对波源的个数、传播 方向、位置等参数进行估计。 3)对运动目标进行跟踪。
(2.1)
(2.2)
这里,J为电流密度: 2.3 进一步可推导出电磁波的波动方程表示式:
J = σE
∂ ∂ ∂ 1 ∂ E ( 2 + 2 + 2 )E = 2 2 ∂x ∂y ∂z c ∂t
2 2 2 2
2.4
假设波动方程的解为: 2.5 为计算方便,对这种形式的方程解作进一步的假 设,将解用指数形式表示:即 s ( x , y , z , t ) = A exp[ j (ω t − k x x − k y y − k z z )] 2.6 将其带入波动方程 (2.4)中,可以得到:
阵列信号处理的基本知识
a
பைடு நூலகம்11
各通道同步采集假设
阵列接收信号需要进行采样和A/D变换 为数字信号后进入DSP处理器进行算法处 理。
Nyquist采样率
宽频段信号:采用欠采样率(空时欠采 样),需要解模糊算法。
a
12
对信号和噪声的假设
窄带假设
信号带宽远小于信号波前跨越阵列最大口径 所需要的时间的倒数,即有如下假设:
1
P
波传播的方向信息含于载波上,而不是复包络上, 即与波形无关(这与时域信号处理不同),空间信 息含于载波上,时域信息含于信号包络上。
a
7
对阵列及其通道的假设 阵元的方向性:
空间入射信号示意图
a ( ) [ f ( ) e , ,f( ) e] 1
j k • p 1
a
j k • p M T
B L 1
F
式中L为阵列最大口径,F和为信号中心频率 和该频率对应的波长。
远场假设
即辐射源到阵列的距离远大于阵列的最大口
径,从而入L2射到阵列的信号波前可近似为平
面波前(d ).
a
13
入射信号统计特性
空间入射信号平稳且各态历经,可以用时
间平均代替集合平均。一般还假定各入射
信号统计独立。
E { s ( t) s H ( t) } d{ i2 , a ,2 g }
6
将整个阵列的输出信号写成矩阵形式为:
x (t) A (t) sn (t)
A [a () ,,a ()]为阵列流行矩阵、空间信
1
P
号方向矢量、阵列响应矩阵。
a ( ) [ 1 e , ,e ] j2 d si /n
j2( M 1 ) d si /n T
阵列信号处理1-2
2 2 T
+ W (t ) RXX (t )W (t )
T
(2.2.3 )
将上式对变量 W(t)求导数并使之等于零
ξ[W (t )] = 2rXd (t ) + 2RXX (t )W (t ) Wopt = RXX rXd
多径信号:有用信号经过多次反(散)射进入接收机的信号. 2,信号模型:
① 随机信号 例如:舰船发动机的噪声,推进器的噪声,未知的通信 信号,传感器热噪声,环境噪声,干扰信号,本质上都是随 机的.这些噪声都典型地来自大量独立微弱源的合成效应, 故应用统计学中心极限定理,可取合成噪声信号的数学模型 为高斯(Gauss)随机过程(通常是平稳高斯随机过程). 高斯信号的统计学性质特别有利于分析计算,因为高斯随机 过程的一阶矩和二阶矩给出了这种随机信号的全部信息特征. 来源:大量独立微弱源的合成效应.(未知的通信信号传感 器热噪声,环境噪声,干扰……等) 模型:Gauss平稳随机过程 参数:均值,方差
(2.1.1) (2.1.2) (2.1.3)
T 方向图形成网络: W = [ w1 , w 2 , L , w N ]
(形成最优权 和系统输出) 自适应处理器:
y (t ) = W T X = X T W
( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题: min s.t
4,有利于多目标远距离的检测和跟踪 (Multiple targets detection and traction) 阵元数越多,天线孔径越大,波束及空间谱分辨率越高. 同时自由度增大.增加形成的主波束数量,实现对多目标的跟 踪.另一方面,也可以增加抑制干扰的数量. 三,自适应阵列信号处理的发展历史 自适应波束形成技术的研究主要在六十年代到七十年代, 到七十年代末已经基本成熟. 空间谱估计:主要是超/高分辨空间谱估计技术,从七 十年代到八十年代末期. 八十年代到九十年代,主要研究如何在实际系统中应用
阵列信号处理第二讲(Part_B)04_03_16
则: 导数为:
其中: 则优化的问题为:
约束条件:
34
约束函数:
对W求导得到: 或: 利用: 我们计算出计算出拉格朗日因子。 所以:
最优权值为:
其中:
35
或者可以写成:
从上式可以看出,最优权值是从理想权值中减去 一个由约束矢量线性组合形成的一个分量。 则:
对于零阶约束条件:
可见:设计的波束是从常规波束中减去多个由在不同零点 位置指向的常规波束而得到的。 同理,n阶导数约束下形成的最后的波束图,也是从常规波 束中减去了在不同零点位置指向的常规波束的n阶导数波束 图而得到的。 上述结果对任意阵列也是成立的,对于零阶约束条件,我 们有:
其中,分子为修正的Dolph-Chebychev零点。修正 的目的是在n=n的位置上不会出现一个跳变,分母 为均匀加权的零点: Dolph-Chebychev零点由(3.187)给出。每个零点 乘上:
21
则: 新零点为: 其余的零点是均匀的:
22
23
四、最小二乘方向图合成
最小二乘误差为: 求导得到: 我们定义: 最优权值的计算公式: 对于标准均匀线阵:
解值为:
(3) m阶多项式在x属于(-1,1)内的最大值和最小值 是相互交替出现的,最值的幅度为1。所以,多项式 在间隔(-1,1)内是等纹波的。
7
(4)所有的多项式均通过点(1,1),且在x=1的位置, 有|Tm(1)|=1。对于x>1,有|Tm(1)|>1。
8
拟合的方法是:令阵列方向图对应的多项式,等于 一个Chebychev多项式,使阵列多项式的系数等于 Chebychev多项式的系数。则该方向图将对应一个 Chebychev多项式的图。我们定义:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈称()()()()12,,,P spana a a θθθ为信号子空间,是N 维线性空间中的P 维子空间,记为P NS 。
PN S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间mS R ∈,如果线性变换P 满足,则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W 实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概率()12,,,N f X X X θ最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2j n i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时: 首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦而当信源与阵列不共面时: 首先将信源投影到阵列平面 然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++,波束形成输出:()()()()0()HHHy t W X t s t W a W J N θ==++LCMV 准则实际上是使()0HWa θ为一个固定值的条件下,求取使得()HW J N +方差最小的W作为最有权值,即:()0min .H X WHW R W s t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
在精确的方向矢量约束条件和相关矩阵精确已知的情况下,LCMV 准则与SNR 准则等效。
对于最有波束形成()1'0|n optLCMV W R a μθ-=,其中n R 应不含信号分量。
SMI (采样协方差矩阵求逆)算法是在此准则上,用一批次采样数据(),1,2,,i Xt i M =来估计得到n R ,()()()11MHn i i i R M X t Xt M∧==∑此估计为最大似然无偏估计,即:(),n n R M R M ∧→→∞SMI 算法输出SNR 损失会随着M 的增加而减小,当M →∞,输出无损失;为了使性能损失不超过3dB ,一般取2MN >。
当精确的方向矢量约束条件和精确的相关矩阵已知的条件不满足时,直接使用()n R M ∧估计n R 求逆会产生信号相消的现象。
SMI 算法的收敛性受n R 特征值分散程度的影响,在超过一定临界值之后,若期望信号不含在R 中,则收敛较快,反之则会变慢;可利用对角加载改善收敛速度。
天线旁瓣相消问题(ASC )自适应天线旁瓣相消器采用下面的结构,基于最小均方误差准则的最适应波束形成(MSE ) 辅助天线增益小,与主天线旁瓣电平相当,无方向性,因此()y t 几乎仅为干扰信号,加在辅助天线的权矢量为1X Xd optW R r -=;主天线与辅助天线对干扰信号接收输出信号相关性较好时,可获得好的干扰抑制性能。
广义天线旁瓣相消问题属于一种部分自适应设计,其结构框图如下: 对于一般的最优波束形成有(LCMV 准则)其权系数分为两部分:一部分为固定权0W (匹配滤波系数);另一部分为自适应权A W ,依赖输入数据,计算最优权值时,只需要计算A W 。
令:则:()0HH HA n n W C C W WC C ===,故有0Hn C C =而:0A W W W =-,故00()H H HHH A A W C W W C W C W C F =-=-=故:00A n W W W W C W =-=-能满足约束方程,可将方程约束条件去掉 得:00min ()()HHn n WW RW W C W R W C W =--,()()10H H nnnW C RC CRW -=信号被分成两个支路:上支路形成目标检测通道(0W 是匹配滤波权系数);下支路形成辅助通道,用其加权求和去预测检测通道中的干扰信号进而对消掉。
对于输入信号()xt 有:()()()()()()0000n H H nnx t s t a x t C a C C C a θθθ=+===因为0HnC C =,故有:()0()(()()())()()()HHHHH n n n n n n nn y t Cx t Cs t a x t C Cs t Cx t Cx t θ==+=+=所以下支路中()y t 不含目标信号,仅有干扰,n C 被称为信号阻塞矩阵(Block Matrix ),由n C 保证下支路中不含目标信号。
当精确的方向矢量约束条件或精确的相关矩阵未知时,会产生信号相消的现象。
而进行降维处理之后:()()()()()10HHAn n n W C T R C T C T RW -=令n C T T −−−→记为,则()()10HHA W T RT TRW -=其中T 称为降维处理矩阵,因为0HT C =,故T 可阻塞信号;且T 的维数p N L <-进行降维处理之后的结构框图为: T 有三种设计方法:1、(Gabriel 法):由指向干扰方向的波束作为权矢量构成的。
2、(Adams 法):由指向目标方向邻近波束权矢量构成。
3、由R 的特征分解的特征矢量构成。
MUSIC 算法MUSIC 算法进行DOA 估计的步骤为:1、由阵列数据()i x t 估计相关矩阵,()()^11MHi i i R x t xt M==∑2、对^R 作特征分解,用其P 个大特征值对应的特征向量12,,,p v v v 张成信号子空间PN S (或用其N P -个小特征值对应的特征矢量1,,p N v v +噪声子空间N PN N -)3、 用搜索矢量()a θ向PNS 作投影,得到()()1N P H i i n i P a v v a θθ-=⎡⎤=⎢⎥⎣⎦∑或用搜索矢量()aθ向N PNN-作投影()()1N H i i n i N P P a v v a θθ=-+⎡⎤=⎢⎥⎣⎦∑ 4、 计算谱峰:()()()21PHin i S P a a vθθθ===∑,谱峰对应的角度就是波束到达角度。
(或用()()()2111NHn ii P S P a av θθθ=+==∑计算谱峰)MUSIC 算法并不能适用于任何几何形态的阵列,不同阵列的()aθ是不一样的,而MUSIC 算法要求()a θ为满秩的范德蒙德矩阵,这个条件有可能不满足。
MUSIC 算法并不能适用于相干源,因为对于相干信源,其相关矩阵^R 有可能不满秩,这样既不能准确知道信源的个数P ,又不能得到准确的信号子空间PN S 和噪声子空间N PN N -。
但可以通过空间平滑法去相关,然后再用MUSIC 算法。
空间平滑法就是将N 元等距线阵分成L 个M 元子阵, 这样对于每一个M 元子阵有()()()()1i iM i X t A D S t N t θ-=+其中:122sin 2sin 2sin 0P d j d j d j eeD e πθλπθλπθλ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦ 于是:()()()()122sin 12sin 22sin P dj d j md j P S te S t e D S t S t e πθλπθλπθλ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦若信源中存在相干源,则采用这种方法后可破坏其相关性。
通过多个子阵,每个子阵相当于空间平移,因为不同信号由于方向不同,旋转因子不同,将多出的旋转因子归并到信号包络()i S t ,所以然后()iS t 便变得不相干了;然后将各子阵数据在相关域平均。
对于非等间隔线阵,若信源中不含相干源,则MUSIC 算法仍然适用;若含有相干源,则则MUSIC 算法不适用,且不能通过空间平滑法去相关。
MUSIC 算法并不能适用于P 个波长不同的平面波波达方向估计,此时()a θ虽为的范德蒙德矩阵,但不满秩,空间角θ模糊。
MUSIC 算法并不能适用于色噪声环境,可以利用高阶累量抑制未知相关矩阵的高斯色噪声,然后运用MUSIC 算法。
例如,4阶累量MUSIC 算法流程如下: 1、 构建4阶累量矩阵:2、在P 个独立源情况下:4HC A A =Γ,其中()12,,,P diagr r r Γ=,i r 为第i 个信号源的4阶累量:()()()()**iii i i r Cum S t S t S t S t ⎡⎤=⎣⎦ 3、对4C 进行特征值分解,用其N P -个小特征值对应的特征矢量1,,p N v v +噪声子空间N PN N -4、由()()()2111NHn ii P S P a av θθθ=+==∑搜索P 个信源的谱峰方向。