阵列信号处理方面10个经典程序
阵列信号处理 ARRAY ppt课件

阵列信号处理
January 19, 2005
School of Communication and Information Engineering
总述
概述 阵列的基本知识(阵列流形) 波束形成 文献分析
精品资料
• 你怎么称呼老师?
• 如果老师最后没有总结一节课的重点的难点,你 是否会认为老师的教学方法需要改进?
盲波束形成
早期的盲波束形成技术依赖方向估计 方向估计分为参数化方法和非参数化方
法两大类 非参数化方法是基于谱的方法
——以空间角为自变量分析到达波的空 间分布(空间谱)
多天线系统的信道容量(1)
全向单天线系统:在收、发两个全向天线之 间只存在一条信道,这时的容量由香农公式 得到:
CBlo2(g 1SN Om R )ni
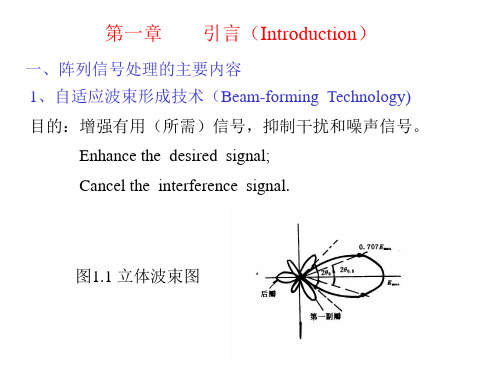
波束形成的目的
目的是从信号、干扰和噪声混在一起的 输人信号中提取期望信号。在接收模式 下,使得来自窄波束之外的信号被抑制, 而在发射模式下,能使期望用户接收的 信号功率最大,同时使窄波束范围以外 的非期望用户受到的干扰最小。
波束形成的优点
在智能天线中,波束形成是关键技 术之一,是提高信噪比、增加用户 容量的保证,能够成倍地提高通信 系统的容量,有效地抑制各种干扰, 并改善通信质量。
S
N足 R够M 大{Blo2(gSNOR m}ni
多天线系统的信道容量比较
CBe a m sBlo2g(1M2SNORm)n i SN足 R 够B大 {2lo2g(M.SNORm}ni
MIMO天线系统示意图
独立信道
天线阵
天线阵2
多天线系统的信道容量(3)
如果发射功率分散到M个独立的信道中, 并且各个信道具有相同的路径损耗,则信 道容量为:
5g 相控阵 信号处理流程

5g 相控阵信号处理流程
5G相控阵信号处理流程主要涉及以下步骤:
1. 接收信号:相控阵天线接收到来自不同方向的信号。
2. 信号分路:接收到的信号分路传输,每一路对应一个天线单元。
3. 相位调整:根据需要调整每个天线单元的相位,以形成所需的波束指向。
这可以通过改变每个天线单元通道的相位(或时延)来实现。
4. 信号合成:调整相位后的各个天线单元信号被合成,形成所需的波束。
5. 信号增强:可能需要进行信号增强处理,例如通过增加增益或使用可控衰减器,以改善信号质量。
6. 信号解调:解调处理将原始信息从调制信号中提取出来。
7. 信号处理:对解调后的信号进行进一步的处理,例如滤波、去噪、解码等。
8. 输出结果:处理后的信号被输出,可以用于后续的应用或进一步的处理。
以上是5G相控阵信号处理的基本流程,具体的实现方式可能会根据不同的系统和应用需求有所差异。
音频阵列信号处理技术的应用案例和声源定位方法

音频阵列信号处理技术的应用案例和声源定位方法音频阵列信号处理技术是一种利用多个麦克风进行信号采集和处理的技术。
通过对多个麦克风采集的音频信号进行合理的处理和分析,可以实现各种应用场景下的声源定位、环境识别、噪声抑制等功能。
本文将介绍几个音频阵列信号处理技术的典型应用案例和声源定位方法。
一、室内会议语音对话录音与识别在室内会议场景中,利用音频阵列信号处理技术可以实现对多个与会者的语音信号的准确采集和识别。
首先,需要使用多个麦克风布置成一定的阵列形式,以便于对不同方向的声源进行准确的采集。
然后,对采集到的多路麦克风信号进行阵列信号处理,通过波束形成算法对感兴趣的声源进行增强,抑制其它噪声干扰。
最后,将处理后的音频信号输入到语音识别系统进行语音识别。
通过音频阵列信号处理技术的应用,可以大大提高会议语音对话录音的质量和语音识别的准确率。
二、智能家居语音助手音频信号处理智能家居语音助手已经成为越来越多家庭的重要组成部分,而音频阵列信号处理技术可以提升智能家居语音助手的声源定位和语音交互能力。
通过在智能家居设备中部署音频阵列麦克风,并利用波束形成算法对用户发出的语音信号进行增强,可以有效降低噪声干扰,提升语音助手对用户指令的识别准确率。
此外,通过采集多个方向的声音信号,还可以实现智能语音助手的声源定位功能,使其能够定位用户的位置并将声音指向相应的方向,提供更便捷的语音交互体验。
三、远场语音识别技术的应用远场语音识别是指在远离麦克风的情况下,利用音频阵列信号处理技术实现对用户语音命令的准确识别。
音频阵列麦克风可以采集到用户远离麦克风的语音信号,并利用波束形成等技术对远声源进行增强,抑制其他噪声干扰。
此外,还可以使用混音技术将远场语音信号与近场语音信号相结合,提高识别准确率。
远场语音识别技术的广泛应用包括智能音箱、车载语音控制系统等。
四、音频会议噪声抑制技术音频会议中,各个与会者通常分处不同位置,由于远距离传输和环境噪声等因素的影响,会导致音频信号质量下降。
阵列信号处理
B
B
1 有 zB t 2
B
2
z e jt d z B t
因此
s r , t z B t e j0t e j0 s 0, t e j0
2
小结: 信号带宽足够小使得波到达 r 处时的复包络基本 不变。 T r 表示了波传播的空间信息(方向、位置), 它仅含于载波项中,而与信号复包络无关。
s exp[ j t r ]d
T
这里函数 s 是任意的,只要其Fourier变换存在即 可。该式表达了沿同一方向 传播的任意波形(信 号),其频率分量任意。
B. 波动方程球坐标系中的解
球坐标系 r , , ,但是,当波动方程的解具有球形 对称时,函数s r , , , t 并不依赖于 和 ,使解简化, 这时波动方程可简化为:
T
波动方程的任意解可以分解为无穷多个“单频” 解的迭加(传播方向和频率分量均任意)。
波动方程的单频解可以写成单变量的函数:
s r , t A exp[ j (t k r ) A exp[ j t r ]
T T
k ,其大小等于传播速度的倒数,其方向与 式中
时间频率 空间频率
b) 任意解:由四维Fourier变换表示: j t k r 1 s r, t s u , e d kd 4 2 j t k r s k , s t , r e d rdt 其中
T
a t 带宽越宽,信号起伏越快。窄带条件即要求a t cos 变化比 0t t 变化慢。
阵列信号处理原理、方法与新

阵列信号处理原理、方法与新
阵列信号处理是一种利用多个传感器(如麦克风、天线等)获取信号,通过信号处理
算法将其合成为一个复合信号,并在此基础上分离、定位、去除、增强等操作的新型信号
处理技术。
在目前的通信、雷达、声学、医学等领域都有广泛应用。
阵列信号处理的基本原理是通过获取多个传感器采样的信号,根据它们的相对位置和
接收到信号的时间差异,构建一个信号阵列,然后通过信号合成的方法将这些信号合成为
一个复合信号。
根据复合信号的特征,进行后续的信号处理。
阵列信号处理的主要方法包括波束形成、空间滤波、方向估计等。
波束形成的主要目
的是聚焦探测器的接收能力,使其在目标方向上获得更高的灵敏度。
空间滤波的主要目的
是通过利用阵列传感器之间的相对位置和互相之间的传感器响应差异,对信号进行滤波,
达到抑制噪声、增强信号等效果。
方向估计则是通过对信号在阵列中传播的速度和波束方
向的监测,对信号的方向进行估计。
阵列信号处理技术的应用十分广泛,其中最为常见的应用领域是通信、雷达和声学等。
在通信中,利用阵列信号处理技术进行信号增强和去除干扰,并根据信号的传播速度和方
向进行信号定位和跟踪。
在雷达中,利用阵列信号处理技术对雷达信号进行波束形成和目
标方向估计,提高雷达的探测效率和目标定位精度。
在声学中,利用阵列信号处理技术进
行声波信号的定位、分离和降噪等操作,提高语音识别和音频娱乐的质量。
总之,阵列信号处理技术是一种高效、可靠的信号处理方法,可以广泛应用于各个领域,有着十分重要的实际应用价值。
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
多通道信号处理中的阵列信号处理技术
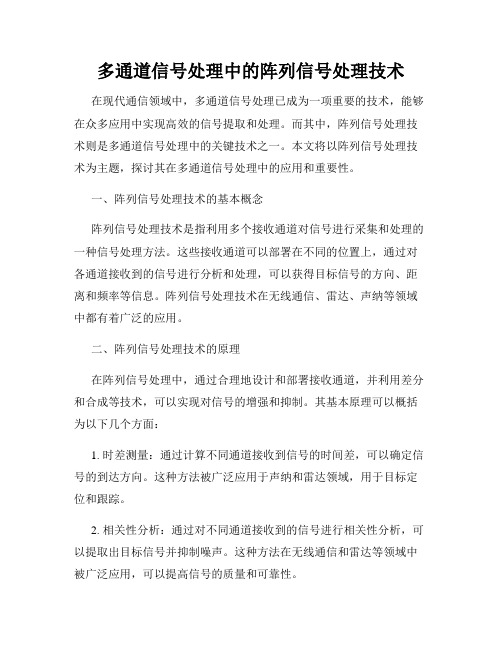
多通道信号处理中的阵列信号处理技术在现代通信领域中,多通道信号处理已成为一项重要的技术,能够在众多应用中实现高效的信号提取和处理。
而其中,阵列信号处理技术则是多通道信号处理中的关键技术之一。
本文将以阵列信号处理技术为主题,探讨其在多通道信号处理中的应用和重要性。
一、阵列信号处理技术的基本概念阵列信号处理技术是指利用多个接收通道对信号进行采集和处理的一种信号处理方法。
这些接收通道可以部署在不同的位置上,通过对各通道接收到的信号进行分析和处理,可以获得目标信号的方向、距离和频率等信息。
阵列信号处理技术在无线通信、雷达、声纳等领域中都有着广泛的应用。
二、阵列信号处理技术的原理在阵列信号处理中,通过合理地设计和部署接收通道,并利用差分和合成等技术,可以实现对信号的增强和抑制。
其基本原理可以概括为以下几个方面:1. 时差测量:通过计算不同通道接收到信号的时间差,可以确定信号的到达方向。
这种方法被广泛应用于声纳和雷达领域,用于目标定位和跟踪。
2. 相关性分析:通过对不同通道接收到的信号进行相关性分析,可以提取出目标信号并抑制噪声。
这种方法在无线通信和雷达等领域中被广泛应用,可以提高信号的质量和可靠性。
3. 波束形成:通过对接收到的信号进行加权合成,可以实现对信号的增强和抑制。
这种方法在天线和无线通信系统中被广泛应用,可以提高通信质量和距离。
三、阵列信号处理技术在多通道信号处理中的应用阵列信号处理技术在多通道信号处理中有着重要的应用。
以下列举了几个常见的应用场景:1. 无线通信系统:在无线通信系统中,利用阵列技术可以实现多天线发射和接收。
通过对接收到的信号进行处理,可以提高无线信号的覆盖范围和传输速率。
2. 声纳系统:在声纳系统中,通过部署多个接收通道,可以实现对海洋中的声波信号进行定位和跟踪。
阵列信号处理技术可以提高声纳系统的性能和探测范围。
3. 雷达系统:在雷达系统中,利用阵列技术可以实现对目标信号的定位和跟踪。
第四章 阵列信号处理

通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.均匀线阵方向图%8阵元均匀线阵方向图,来波方向为0度clc;clear all;close all;imag=sqrt(-1);element_num=8;%阵元数为8d_lamda=1/2;%阵元间距d与波长lamda的关系theta=linspace(-pi/2,pi/2,200);theta0=0;%来波方向w=exp(imag*2*pi*d_lamda*sin(theta0)*[0:element_num-1]');for j=1:length(theta)a=exp(imag*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]');p(j)=w'*a;endfigure;plot(theta,abs(p)),grid onxlabel('theta/radian')ylabel('amplitude')title('8阵元均匀线阵方向图')当来波方向为45度时,仿真图如下:8阵元均匀线阵方向图如下,来波方向为0度,20log(dB)随着阵元数的增加,波束宽度变窄,分辨力提高:仿真图如下:2.波束宽度与波达方向及阵元数的关系clcclear allclose allima=sqrt(-1);element_num1=16; %阵元数element_num2=128;element_num3=1024;lamda=0.03; %波长为0.03米d=1/2*lamda; %阵元间距与波长的关系theta=0:0.5:90;for j=1:length(theta);fai(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num1*d));psi(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num2*d));beta(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num3*d)); endfigure;plot(theta,fai,'r',theta,psi,'b',theta,beta,'g'),grid onxlabel('theta');ylabel('Width in radians')title('波束宽度与波达方向及阵元数的关系')仿真图如下:3. 当阵元间距时,会出现栅瓣,导致空间模糊。
仿真图如下:/2d λ>4.类似于时域滤波,天线方向图是最优权的傅立叶变换仿真程序和仿真图如下:clcclear allclose allima=sqrt(-1);element_num=32; %阵元数source_num=1; %信源数d_lamda=1/2; %阵元间距与波长的关系theta=linspace(-pi/2,pi/2,200);theta0=0; %来波方向w=exp(ima*2*pi*d_lamda*sin(theta0)*[0:element_num-1]');for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]');p(j)=w'*a;endfigure;subplot(1,2,1)plot(theta,abs(p)),grid onxlabel('theta/radian')ylabel('amplitude')title('按定义的方向图')pfft=fftshift(fft(w,128));subplot(1,2,2)plot(linspace(-pi/2,pi/2,128),abs(pfft)),grid onxlabel('theta/radian')ylabel('FFT_amplitude')title('最优权的傅里叶变换')5.%最大信噪比准则方向图和功率谱clc;clear all;close all;ima=sqrt(-1);element_num=8; %阵元数为8d_lamda=1/2; %间距为半波长theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=20; %干扰方向L=512; %采样单元数for i=1:Lamp0=10*randn(1);amp1=200*randn(1);ampn=1;s(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]');j(:,i)=amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]');n(:,i)=ampn*(randn(element_num,1)+ima*randn(element_num,1));endRs=1/L*s*s'; %信号自相关矩阵Rnj=1/L*(j*j'+n*n'); %干扰+噪声的自相关矩阵[V,D]=eig(Rs,Rnj); %(Rs,Rnj)的广义特征值和特征向量[D,I]=sort(diag(D)); %排序Wopt=V(:,I(8)); %最优权矢量for j=1:length(theta)a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=Wopt'*a;p(j)=a'*Rs*a+a'*Rnj*a;endF=20*log10(abs(f)/max(max(abs(f))));P=20*log10(abs(p)/max(max(abs(p))));subplot(121)plot(theta,F);grid on;hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.')xlabel('theta/0');ylabel('F in dB');title('max-SNR 方向图');axis([-90 90 -50 0]);hold onsubplot(122)plot(theta,P,'r');grid onxlabel('theta/0');ylabel('功率in dB');title('max-SNR功率谱')仿真图如下:6.%ASC旁瓣相消----MSE准则clc;close all;clear allima=sqrt(-1);M=32; %辅助天线的数目d_lamda=.5;theta0=-30; %来波方向theta1=60; %干扰方向L=512; %采样单元数s=zeros(1,512); %预划分一个区域for ii=1:L;amp0=1*randn(1); %信号的幅度随机产生,保证信号之间是不相关的amp1=200*randn(1);ampn=1;jam(:,ii)=amp1*exp(ima*2*pi*0.5*sin(theta1*pi/180)*[0:M-1]')+ampn*(randn(M,1) +ima*randn(M,1)); %干扰+噪声s(ii)=amp0*exp(ima*2*pi*0.5*sin(theta0*pi/180))+amp1*exp(ima*2*pi*0.5*sin(thet a1*pi/180))+ampn*(randn(1,1)+ima*randn(1,1));%接收信号(信号+干扰+噪声)s0(ii)=amp0*exp(ima*2*pi*0.5*sin(theta0*pi/180));endRx=1/L*jam*jam'; %噪声自相关矩阵,相当于X(t)r_xd=1/L*jam*s';Wopt=pinv(Rx)*r_xd;delta=s0-(s-Wopt'*jam);delta1=abs(mean(delta.^2)-(mean(delta)).^2) %方差theta=linspace(-pi/2,pi/2,200);for jj=1:length(theta)a=exp(ima*2*pi*.5*sin(theta(jj))*[0:M-1]');f(jj)=Wopt'*a;endF=20*log10(abs(f)/(max(max(abs(f)))));figure(1)plot(theta*180/pi,F),grid on,hold onplot(theta0,-50:0,'.')plot(theta1,-50:0,'.')xlabel('theta/o');ylabel('F/dB');title('MSE准则下的方向图')axis([-90 90 -50 0]);%可为x轴和y轴设置一个极限范围仿真图如下:7. %线性约束最小方差(LCMV)准则clc;clear all ;close all;ima=sqrt(-1);element_num=8; %阵元数d_lamda=1/2; %阵元间距与波长的关系theta=-90:0.5:90-0.3; %搜索范围theta0=0; %三个信号源的来波方向theta1=30;theta2=60;L=512; %采样单元数for i=1:L;amp0=10*randn(1);amp1=100*randn(1);amp2=10*randn(1);ampn=10;x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...ampn*(randn(element_num,1)+ima*randn(element_num,1));endRx=1/L*x* x';steer1=exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')steer2=exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')steer3=exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')C=[steer1 steer2 steer3];F=[1 0 1]'; %把三个方向都作为来波方向w=inv(Rx)*C*(inv(C'*inv(Rx)*C))*F;for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*inv(Rx)*a);endf=10*log10(abs(f)/(max(max(abs(f)))));figure(1)subplot(121)plot(theta,f),grid on,hold onplot(theta0,-20:0,'.')plot(theta1,-20:0,'.')plot(theta2,-20:0,'.')xlabel('theta/o');ylabel('F/dB');title('Capon beamforming方向图')axis([-90 90 -20 0]);%可为x轴和y轴设置一个极限范围P=10*log10(abs(p)/(max(max(abs(p)))));subplot(122)plot(theta,P),grid on,hold onplot(theta0,-20:0,'.')plot(theta1,-20:0,'.')plot(theta2,-20:0,'.')xlabel('theta/o');ylabel('功率/dB');title('Capon beamforming功率谱')仿真图如下:8. %Capon beamformingClc;clear all ;close all;ima=sqrt(-1);element_num=8; %阵元数d_lamda=1/2; %阵元间距与波长的关系theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=20; %干扰方向theta2=60; %干扰方向L=1000; %采样单元数for i=1:L;amp0=10*randn(1);%信号的幅度随机产生,保证信号之间是不相关的amp1=200*randn(1);amp2=200*randn(1);ampn=3;x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...ampn*(randn(element_num,1)+ima*randn(element_num,1));endRx=1/L*x* x';R=inv(Rx);steer=exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]');w=R*steer/(steer'*R*steer);%Capon最优权矢量for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*R*a);endF=20*log10(abs(f)/(max(max(abs(f)))));P=20*log10(abs(p)/(max(max(abs(p)))));%此处是功率的对数形式Figure;subplot(121)plot(theta,F),grid on,hold onplot(theta0,-50:0,'.')plot(theta1,-50:0,'.')plot(theta2,-50:0,'.')xlabel('theta/o');ylabel('F/dB');title('Capon beamforming方向图')axis([-90 90 -50 0]);subplot(122)plot(theta,P),grid onxlabel('theta/o');ylabel('功率/dB');title('Capon beamforming功率谱')仿真图如下:9.%不同方法估计协方差矩阵的Capon波束形成clc;clear all;close all;ima=sqrt(-1);element_num=8; %阵元数为8d_lamda=1/2; %间距为半波长theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=50; %干扰方向L=512;%采样单元数for i=1:Lamp0=10*randn(1);amp1=50*randn(1);ampn=0.5;s(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]');j(:,i)=amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]');n(:,i)=ampn*exp(ima*2*pi*randn(1)*[0:element_num-1]');endRx=1/L*(s+j+n)*(s+j+n)';%接收信号自相关矩阵Rnj=1/L*(j+n)*(j+n)';%干拢+噪声的自相关矩阵e=exp(ima*2*pi*d_lamda*sin(theta0*pi/180)*[0:element_num-1]');%来波方向信号Wopt_Rx=inv(Rx)*e/(e'*inv(Rx)*e);%采用接收信号的权矢量Wopt_Rnj=inv(Rnj)*e/(e'*inv(Rnj)*e);%采用干拢+噪声信号的权矢量for j=1:length(theta)a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f1(j)=Wopt_Rx'*a;f2(j)=Wopt_Rnj'*a;endF1=20*log10(abs(f1)/max(max(abs(f1))));F2=20*log10(abs(f2)/max(max(abs(f2))));figure;plot(theta,F1,theta,F2,'r'),grid on;hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.')xlabel('theta/0');ylabel('F(1,2)/dB');title('不同方法估计协方差矩阵的Capon波束形成');axis([-90 90 -50 0]);仿真图如下:10.%多点约束的Capon波束形成和方向图clc;clear all ;close all;ima=sqrt(-1);element_num=8; %阵元数d_lamda=1/2; %阵元间距与波长的关系theta=-90:0.3:90; %搜索范围theta0=0; %来波方向theta1=20; %干扰方向theta2=50; %干扰方向L=512; %采样单元数Rx=zeros(element_num,element_num);%产生协方差矩阵for i=1:L;amp0=10*randn(1);amp1=10*randn(1);amp2=50*randn(1);namp=0.5*randn(1);%噪声的幅度随机产生,保证噪声与信号之间是不相关的J(:,i)=amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...namp*exp(ima*2*pi*randn(1)*[0:element_num-1]');x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...J(:,i);%表示接收信号endRx=Rx+1/L*x*x';R=inv(Rx);w=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]');for j=1:length(theta);a=exp(ima*2*pi*d_lamda*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*R*a);endF=10*log10(abs(f)/max(max(f)));%取对数的方向图P=10*log10(abs(p)/max(max(p)));%取对数的功率谱估计figure;subplot(121)plot(theta,F),grid on,hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.');plot(theta2,-50:0,'.'); xlabel('theta/o');ylabel('F/dB');title('capon beamforming方向图')subplot(122)plot(theta,P),grid on,hold onplot(theta0,-50:0,'.');plot(theta1,-50:0,'.');plot(theta2,-50:0,'.'); xlabel('theta/o');ylabel('P/dB');title('capon beamforming功率谱')仿真图如下:大作业%自适应波束形成方向图clc;clear all;close all;ima=sqrt(-1);element_num=8; %阵元数c=3e8;f=500e6;lamda=c/f;d=1/2*lamda; %阵元间距与波长的关系theta=-90:0.5:90; %范围theta0=0; %来波方向theta1=45; %干扰方向theta2=60; %干扰方向L=512; %采样单元数for i=1:L;amp0=10*randn(1);%信号的幅度随机产生,保证信号之间是不相关的amp1=100*randn(1);amp2=100*randn(1);ampn=10;x(:,i)=amp0*exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')+...amp1*exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')+...amp2*exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')+...ampn*(randn(element_num,1)+ima*randn(element_num,1));%产生阵列信号endRx=1/L*x* x';steer1=exp(ima*2*pi*1/2*sin(theta0*pi/180)*[0:element_num-1]')steer2=exp(ima*2*pi*1/2*sin(theta1*pi/180)*[0:element_num-1]')steer3=exp(ima*2*pi*1/2*sin(theta2*pi/180)*[0:element_num-1]')C=[steer1 steer2 steer3];F=[1 0 0]';%把0度方向作为来波方向w=inv(Rx)*C*(inv(C'*inv(Rx)*C))*F;for j=1:length(theta);a=exp(ima*2*pi*1/2*sin(theta(j)*pi/180)*[0:element_num-1]');f(j)=w'*a;p(j)=1/(a'*inv(Rx)*a);endF=20*log10(abs(f)/(max(max(abs(f)))));P=20*log10(abs(p)/(max(max(abs(p)))));%此处是功率的对数形式figuresubplot(121)plot(theta,P),grid on,hold onxlabel('theta/o');ylabel('F/dB');title('阵列信号方向图')axis([-90 90 -50 0]);subplot(122)plot(theta,F),grid on,hold on;plot(theta0,-50:0,'.')plot(theta1,-50:0,'.')plot(theta2,-50:0,'.')xlabel('theta/o');ylabel('功率/dB');axis([-90 90 -50 0]);title('自适应波束形成方向图')仿真图如下:当采样数L=2048时仿真图如下:当采样数L=2048时仿真图如下:当L=512,幅度为amp0=10*randn(1);amp1=200*randn(1);amp2=200*randn(1);ampn=10;时仿真图如下:。