车用高功率密度永磁同步电机的研究_沈启平.kdh_Part1
永磁同步直线电机的H-inf控制研究说课材料

永磁同步直线电机的H-i n f控制研究永磁同步直线电机H控制研究∞H Control for Permanent Magnet Synchronous Linear Motor∞沈阳工业大学电气工程学院永磁同步直线电机∞H 控制研究XXX(沈阳工业大学 电气工程学院,辽宁 沈阳)∞H Control for Permanent Magnet Synchronous Linear MotorXXX(College of Electrical Engineering ,Shenyang University of Technology, Shenyang Liaoning, China)Abstract :A ∞H controller is presented for permanentmagnet synchronous linear motor (PMSLM). The ∞H control theory is used to design a feedback controller in the speed loop in order to guarantee robust stability and robust performance of the closed loop system under the condition of external disturbance. Based on nominal model of the plant, a PI controller is designed in the position loop to meet the performance requirement. The results of simulation show that the controller presented is reasonable and effective.Key Words : PMSLM, ∞H control, Robust performance, IP position controller摘 要:针对永磁同步直线电机,提出了∞H 控制。
一种高功率密度永磁同步电机的设计

一种高功率密度永磁同步电机的设计
白秉旭
【期刊名称】《科技信息》
【年(卷),期】2013(000)014
【摘要】本文以稀土永磁同步电动机为设计研究对象,围绕高功率密度,重点讲述了稀土永磁同步电动机的电磁设计过程,并用功能强大的电磁场仿真工具Ansoft Maxwell仿真优化设计,优选出最佳、合理的设计方案.
【总页数】2页(P256-257)
【作者】白秉旭
【作者单位】南京江宁中等专业学校
【正文语种】中文
【相关文献】
1.一种小型高功率密度伺服驱动模块设计 [J], 吴雪琴;张新华;黄建
2.一种高功率密度电机驱动器的设计实现 [J], 张允志;曹为理;韩瑜
3.车用高功率密度永磁同步电机设计及试验研究 [J], 刘奇林;沈启平
4.一种高功率密度T/R组件的设计 [J], 李江达;薛培;魏斌
5.舰用泵高功率密度永磁同步电机设计与分析 [J], 蒋超; 乔鸣忠; 彭威; 张志斌因版权原因,仅展示原文概要,查看原文内容请购买。
车用永磁同步电机关键技术

“双V”型磁路结构 • 优点: a.具备聚磁效果明显,可 控; b. 磁阻扭矩较“V”大 c.适用于渗镝或渗铽工艺。 缺点: a.磁钢加工与装配工艺复 杂。 b. 不适用于转子厚度苛 刻 的场合 。 • 适合匹配的绕组结构 分布绕组(TM)。
四、IPM磁路结构
4.2 车用永磁同步电机磁路结构发展趋势
优先级推荐:满足电机可控性>满足电机可制造性>取尽可能多的磁极
b. 槽数Z(一般情况下,必须先决定P值再选Z值) (概念:每极每相槽数Q=Z/(3 × 2 × P),Q为整数时称作整数槽绕组,否则称之为分数槽绕组。 • 车用大功率电机若是选择了集中绕组,那么电机的Q=0.5,那么槽数Z=3 ×P,也有少数小功率电机8 极9槽或10极12槽。 • Q值越大,电机的反电势谐波越小,电机齿槽扭矩和力矩波动幅值越小,但根据经验Q≥3后,对谐波 改善效果可以忽略。Q值越大,电机下线工艺性越差。 • 华域多年电机研制经验证明:采用分数槽分布绕组可以再相对小的Q值情况下实现较好的反电势波形, 特别是有利于电机磁阻扭矩的提高。 • 由于驱动电机的功率较大,电机单相串联匝数较少,那么很多时候需要选择合适的槽数Z,来保证电 机匝数的合理。
车用永磁同步电机设计曹红飞2016年9月中国航天科工集团公司60华域汽车系统股份有限公司24海鹰集团16技术人员贵州航天工业有限责任公司公司介绍since2011?电机绕组及制作两项专利技术?高功率密度可达3kwkg?内嵌式永磁体及高激磁能力转子?转子斜极技术?螺旋水道冷却?全球领先的绝缘体系?扁铜线工艺电机?模糊化高精度控制?高容错率和高适应性?软件架构参照autosar标准?高次谐波补偿技术?高集成度一芯控多机?接地层独立设计?控制器双向逆变能力电力电子箱公司介绍目录?电机磁场及永磁同步电机工作原理?车用驱动电机的主要性能参数?车辆对主永磁同步电机的特殊要求?永磁同步电机的磁路结构?永磁同步电机相关设计参数及取值?永磁同步电机的仿真手段?永磁同步电机的设计输出参数一电机磁场及工作原理sb??1定义11磁通定义
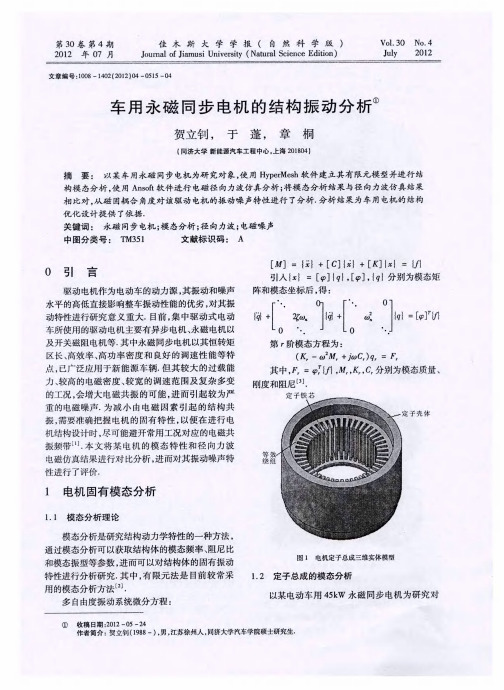
车用永磁同步电机的结构振动分析
( erE eg tmo v n iern e tr o gi nvri ,S a g a 0 8 4 hn ) Cl n ryAuo t eE gn eigC ne ,T nj U iest h n h i 10 ,C ia a i y 2
58 1
佳 木 斯 大 学 学 报 ( 自 然 科 学 版 )
21 0 2年
由于该电机的调速范围较广 , 难以在整个转速 力 波 谐 波 分 量 .图 5 给 出 了 电 机 额 定 负 载 下 范围内避开电磁共振频率 , 重点考虑避开常用车速 30 r 00p m转速时 的谐 波分布情 况 , 图中可 以看 从 出, 低次 谐波 分量 占 比重 较 大 , 因此 相应 的频 率值 下 对应 的共振 点 . 引. 该 车 的 常 用 车 速 对 应 的 电加 转 速 约 为 ∞应该 给予 重视 机 ∞ ∞ 如 ∞ ∞ 3 0 rm, 点关 注 电机 在 该 转 速 对 ∞ 的径∞ ∞ ∞ ∞ ∞ ∞ 0 0p 重 应 ∞ 向 电磁 表 4 额 定 负载 下 电机 不 同转 速对 应 的径 向电磁 力波 频率
[] 庞剑 , 3 谌刚 , 何华. 汽车噪 声与振 动 [ . 京 : M] 北 北京 理工大
学 出版社 , 0 . 2 6 0
[] 陈瑞峰. 4 直流无刷驱动电机定子的振动噪声特性研究及优化 设计 [ ]同济大学 , 1. D. 2 1 0 [] 佟 宁泽. 中型感 应电机 电磁力及 定子振 动分析 [ ]沈 阳 5 大 D.
、 4 、 8 、2 、60 2 0 2 030 3 、 、4 、8 0 0 0 0 40 4 0 0 0 、2 、7 、2 、 8 、 30 3 34 64 0 0 3 6 0 、7 、2640 33 4 、80 3 6 、8 40 0
永磁同步直线电机磁阻力分析及控制策略研究

II
华 中 科 技 大 学 博 士 学 位 论 文
sliding-mode control device of speed loop was designed. In order to reduce the chattering of the sliding-mode control, the disturbance observer was designed to estimate the disturbance of the servo system and the estimation was fed back to the output current of the sliding-mode control. Furthermore, the fuzzy control strategy was introduced to modify the amplitude of the switching control at real time, in order that the chattering of the control system was weakened, and at the same time, the robustness and the fast tracking performance were maintained. On the basis of the theory study above, the design and the realization of the software and hardware of the servo system of PMSLM based on the DSP was described in detail, and the experiments were made to verify the effectiveness of the proposed constructive design methods and control algorithms. Keywords: permanent magnetic synchronous linear motor; thrust ripple; detent force; end-effect; slot-effect; Fuzzy sliding-mode control
永磁同步牵引电机高速惰行时反电势问题的研究

uncontrolled generation during coasting.After some research of uncontrolled
have been
on
the forming solve the
mechanism and operation
generation,two methods to
2
绪论
分析可得【10】:
图1-2永磁同步电机主电路结构图
Fig.1—2 Main Circuits ofPMSM
(1)惰行时如果反电势较大,且逆变器直流侧电容不能完全吸收再生能量导 致直流侧过电压,电压的值大于IGBT的耐压值U孵。r,那么IGBT有可能被烧毁【ll】; (2)如果电机反电势大于直流侧电压∽。,那么电流经逆变器的反并联二极
to
are
presented in order
demonstrate
the high back・EMF problem during
KEYWORDS:permanent
CI。ASSN0:TM921.2‘
magnet
synchronous traction motors;back-EMF;flux
weakening control;uncontrolled generation
factor
little volume,light weight,high
efficiency and power
and higll
call
reliability,ere.For the existing of
permanent
magnet material,the back EMF
电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究(一)――概要

收稿日期 :2001212229基金项目 :国家 863计划项目 (8632Z37203 1电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究 (一———恒转矩控制及弱磁控制时的功率特性徐衍亮(250061山东省济南市山东大学电气工程学院 (100083北京市北京航空航天大学宇航学院摘要采用 d 、 q 坐标系下的相量分析方法 , 研究永磁同步电动机(PMSM 、特别是电动汽车用 PMSM 1详细分析了不同弱磁率、不同凸极率对电机电压、电流相量变化轨迹的影响 , 及由此引起的电机的功率特性及弱磁扩速能力的差异 1推导出以弱磁率和凸极率为变量的 PMSM 的弱磁扩速倍数表达式 , 由此得出提高 PMSM 弱磁扩速能力的根本途径 , 比较了不同磁路结构 PMSM 弱磁扩速能力的大小 1关键词功率特性 ; 弱磁 ; 相量分析 /电动汽车 ; 永磁同步电动机中图分类号TM41文献标识码 :A文章编号 :1000-5323(2002 05-0401-05STU DY ON POWER CAPABIL ITY AN D FL UX 2WEAKENING L EVE L OF PERMANENT MAGNET SY NCHRONOUS MOTORIN E L ECTRIC VEHICL E APPL ICATION (Ⅰ— POWER CAPAB IL IT Y WHEN CONSTAN T TORQU E AND FL U X2WEN KEN IN G CON TROLX U Y an 2liang(School of Elect. Eng. , Shandong Univ. , Jianan City , Shandong Province 250061,China(Beijing Univ. of Aeronautics and Astronautics , Beijing City 100083, ChinaABSTRACT The phasor method is adopted for the first time to analyze the influence of the demagnetizing coefficient , saliency ratio on the loci of voltage and current and then on the power capability and flux 2weakening level of permanent magnet synchronous motor (PMSM especially in electric vehicle (EV application. The de2scription of the PMSM ’ s flux 2weakening adjusting speed capability is wor ked out and expressed with the demag 2netizing coefficient and saliency ratio , by which the radical methods to enhance the PMSM ’ s flux 2weakening ca 2pability are concluded , and the flux 2weakening capability of PMSM with different magnet structures is com 2pared.KE Y WOR DS Power capability ; Flux 2weakening ; Phasor analysis/Electric vehicle (EV ; Permanent magnet synchronous motor (PMSM2002年 10月第 32卷第 5期山东大学学报 (工学版JOURNA L OF SHAN DONG UNIVERSIT Y(ENGINEERING SCIENCEVol. 32 No. 5Oct. 20020引言永磁同步电动机具有尽可能宽广的弱磁调速范围对电动汽车驱动有特别重要的意义 , 能够在电机最大功率 (即逆变器容量不变的条件下提高电动汽车的起动加速能力 [1]及低速爬坡能力 , 或者说在保持电动汽车起动加速及低速爬坡能力不变的前提下降低电机的最大功率 , 从而降低逆变器的容量 1因此对电动汽车驱动用 PMSM 功率特性 (功率转速特性及弱磁扩速能力的分析具有更为重要的意义 1目前 , 分散地选取几组电机参数 (永磁磁链和交直轴电感进行功率特性曲线比较是永磁同步电动机功率特性分析的通用方法 [2~7]1然而这一方法不但分析结论缺乏普遍性 , 而且无法对电机参数变化引起的功率特性曲线的差异原因进行研究和探讨 1实际上 , 永磁同步电动机的不同参数产生电机不同的功率特性 , 原因在于不同电机参数引起电机电压电流相量不同的变化轨迹 1因此本文采用永磁同步电动机 d 、 q 坐标系下的相量分析方法 , 以弱磁率和凸极率为电机参数 , 从电机调速过程中电压电流相量的变化轨迹出发 , 考虑到电动汽车用电机运行的实际 , 研究永磁同步电动机的功率特性 , 对电机的凸极率和弱磁率变化所引起的电机功率特性差异进行综合分析 1本论文由两部分组成 , 第一部分采用永磁同步电动机 d 、 q 坐标系下的相量分析方法 , 以凸极率和弱磁率为电机参数 , 分析了永磁同步电动机恒转矩控制及普通弱磁控制时的电压电流相量的变化轨迹及功率特性的变化规律 ; 第二部分在第一部分的基础上分析了最大输入功率弱磁控制的电压电流相量的变化轨迹及功率特性 , 提出最大输入功率弱磁控制的等效电流控制策略 , 推导出以弱磁率和凸极率为变量的 PMSM 的弱磁扩速倍数的数学表达式 , 提出提高 PMSM 弱磁扩速能力的根本措施 , 分析了损耗、饱和等因素对 PMSM 功率特性及弱磁扩速倍数的影响 1 1电动汽车驱动用永磁同步电动机电流控制策略及其相量分析方法电动汽车驱动用永磁同步电动机与一般驱动用永磁同步电动机的区别在于 , 前者需更大的短时和瞬时大电流 , 使其不但拥有恒转矩控制和普通弱磁控制 , 还具备最大输入功率弱磁控制的条件 11. 1永磁同步电动机电流控制策略由于永磁同步电动机的功率特性及弱磁扩速能力不但决定于电机本身的参数 , 还与逆变器容量及直流母线电压大小有关 , 因此以下分析是以电机的凸极率ρ和弱磁率ξ为参数 , 分别定义为 :ρ=LL d(1ξ=Ψf(2 其中 :L d 、 L q ———直交轴电感Ψf——— d 、 q 坐标系下永磁磁链电动汽车用永磁同步电动机的电流控制策略有三种即 [2~4]:1 恒转矩控制:i s =i lim , u Φu lim ;2 普通弱磁控制 :i s =i lim , u =u lim ;3 最大输入功率弱磁控制:i s Φi lim , u =u lim ; 其中 :i s 、 u s 分别为 d 、 q 坐标系下电机电流和电压 , i lim 、 u lim 分别为 d 、 q 坐标系下电机的极限电流和极限电压 1对这三种电流控制策略 , 其中恒转矩控制和普通弱磁控制是必须存在的 , 最大输入功率弱磁控制只有在ξ>1时才有可能存在 1电流控制策略的详细内容请见有关文献 11. 2调速永磁同步电动机功率特性相量分析方法图 1为调速永磁同步电动机d 、 q 坐标系下的相量图 , 其中角α、β分别为电压电流相量与 q 轴的夹角, φ为功率因数角 , 在不计各种损耗的假定下 , 电机的功率可表示为 :P em =u s i s cos φ(3 为使分析更具普遍性 , 永磁同步电动机功率特402山东大学学报 (工学版 2002年性的分析以标幺值形式进行 , 功率及电角速度的基值 P c 、ωc 分别定义为 :P c =P emN =u lim i lim N(4 ωc =Ψf(5其中, i lim N =Ψf /L d可以看出 , 基值功率是弱磁率为 1时电机的最大功率 , 基值电角速度为电机理想空载时的转折电角速度1图 1永磁同步电动机电压电流相量Fig. 1 Phasors of voltage and current of PMSM2永磁同步电动机恒转矩控制和普通弱磁控制时的功率特性2. 1电压电流相量变化轨迹根据前述电流控制策略 , 永磁同步电动机在恒转矩控制及普通弱磁控制下 , 电压、电流相量角α、β满足下式 :α=tan -1[ρcos β/(1/ξ-sin β ]ξ<1/sin β180°-tan -1[ρcos β/(sin β-1/ξ]ξ>1/sin β90°ξ=1/sin β(6因此 , 永磁同步电动机在整个恒转矩控制区和普通弱磁控制区具有如图 2所示的电压、电流相量变化轨迹 , 可以看出 :1 在恒转矩控制区 , 电流相量保持为 OA i 不变 , 其相角β1可表示为下式 :β1=0°ρ=1sin-1224(ρ-1ρ≠ 1(7电压相量相角为α1, 幅值由 0增加到其极限电压 u lim 12 在普通弱磁控制区 , 电流相量由 OA i 变化到 OB i , 即幅值不变 , 相位由β1→ 90°; 电压相量幅值不变 , 但相位由α1开始根据弱磁率的不同而具有不同的变化规律 1ξ=1时 , 随电流相量由 OA i 变化到 OB i , 电压相量由 OA u 变化到 OB u , 即随电流相位由β→ 90°, 电压相位也由α1→90°, 如图 2a 所示1ξ<1时 , 在整个弱磁区 , 电压相量相角先由α1增大到某一最大值αz , 然后再减少到 0, 变化轨迹如图 2b 所示 , 即电压相量由 OA u 变化到 OB u , 然后反转变化到 OC u 1而且电压相角为αz (即电压相量转折时的电流相角βz 只与弱磁率ξ有关 , 而与凸极率无关, βz 满足下式 :sin βz =ξ(8ξ>1时 , 在整个弱磁过程 , 电压相角由α1一直增大到 180°, 如图 2c 所示 1而且α达 90°时的电流相角βp 也与ρ无关 (由于α1可能大于 90°, 此时该点为假想点 , 且满足下式sin βp =ξ(9图 2恒转矩控制及普通弱磁控制时电压电流相量变化轨迹Fig. 2 Loci of voltage and current phasors of PMSM with constant torque control and ordinary flux 2weakening control 第 5期徐衍亮 :电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究 (一 4032. 2功率与电角速度之间的关系在普通弱磁控制下 , 电机电角速度与电流相量角之间的关系为 :ω=(L q i q 2+(Ψf +L d i d 2=(L q i s cos β 2+(Ψf -L d i s sin β2(10以标么值形式表示式 (10 为:ω3=ω/ωc =1/(ρξcos β 2+(1-ξsin β2(11此时功率标么值为 :P 3em =P em /P emN =ξcos φ(12计及恒转矩运行时功率的变化特征 , 可得 P em /P emN =f (ω/ωc 的变化曲线如图 3所示 11—ξ=3 2—ξ=2 3—ξ=1125 4—ξ=1 5—ξ=0. 909 6—ξ=0. 6677—ξ=01333图 3电磁功率与电角速度之间的关系Fig. 3 Characteristics of power versus electric angle velocity404山东大学学报 (工学版 2002年并且可以推得最高转速ω3max 、最高转速时的功率P 3em (ω=ωmax 和最大功率 P 3em max 分别为 :ω3 max =|1-ξ|ξ≠ 1∞ ξ=1(13P 3em (ω=ωmax = 0ξ≠ 11ξ=1(14P 3em max = ξξΦ1>1ξ>1(151 ξΦ1时 , 电机的最高转速、最高转速时的功率及最大功率仅决定于ξ, 与ρ无关 1因此 , 相同ξ下 , 电机功率特性曲线基本相同 [5]1凸极率仅对产生最大功率时的转速值有影响, ρ增大时该转速值降低 , 有利于提高电机的低速特性 1但当ξ较小时 (即永磁磁链比直轴磁链大很多, ρ对功率特性曲线影响很弱 , 这是由于磁阻功率比永磁功率更强地决定于电机电流的大小 [4]1所以在ξ较小时 , 有无凸极性对电机的功率特性影响可忽略不计 1同时可以看出 , 增大弱磁率ξ, 不但线性增加了最大功率 , 而且增加了电机的最高转速 , 在ξ=1时具有理想的最高转速 1因此拥有尽可能大的凸极率和弱磁率 , 且采用最大转矩电流控制同普通弱磁控制相结合的电流控制策略的永磁同步电动机 , 具有良好的功率特性 12 ξ>1时 , 首先 , 最高转速随ξ的增大而降低 , 且电机在相同ξ下的功率特性受凸极率影响 1其次最大功率与通入电流不再是线性关系 , 增加电机电流 (即增加ξ 并不能线性地增加电机的最大功率 , 功率的增加程度决定于ρ的大小 1ρ=1时功率表示为 :P em =ωΨf i q =Ψ1+((1/ξ-sin β /cos β 2 (16可以看出在sin β=1/ξ时获得最大电磁功率 , 表示为 :P em max =u lim Ψf /L =u lim i sN =P emN (17 此时增加电流 , 最大功率不变 1所以在ξ>1时 , 增大电流不但使调速范围变小 , 而且得不到与电流相应大小的最大功率 1因此当ξ>1时不宜采用普通弱磁控制 1但在ξ>1时 , 增大ξ, 不但最大功率增加 (尽管不是线性增加 , 而且发生最大功率时的转速降低 , 因此有利于提高电机的低速转矩 1参考文献[1] Mehrdad Ehsani , Khwaja M , Hamid A. Propulsion sys 2 tem design of electric and hybrid vehicles [J ].IEEE Trans. Ind. Electronics , 1997, 44(1 :19~27.[2] Morimoto S , Takeda Y , Hirasa T , Taniguchi K. Ex 2 pansion of operating limits for permanent magnet motor by current vector control considering inverter capacity [J]1IEEE Trans. on Ind. Application , 1990, 26(5 : 886~871.[3]唐任远 . 现代永磁电机理论与设计 [M ].北京 :机械工业出版社 ,1997.[4]郭振宏 . 宽恒功率调速范围主轴永磁同步电动机及其传动系统的研究[D ]1[博士学位论文 ], 沈阳 :沈阳工业大学 ,1999.[5] Morimoto S , Sanada M , Takeda Y. Inverter 2driven syn 2 chronous motor for constant power [J ].IEEE Trans. Ind. Magazine , 1996,19~24.[6] Schiferl R F , Lipo T A. Power capability of salient pole permanent magnet synchronous motor in variable s peed drive applications [J ].IEEETrans. Ins. A pplication , 1990,26(1 :115~123.[7] Chalmers B J , Musaba L , G osden D F. Variable 2fre 2 quency synchronous motor drives for electric vehicles[J]. IEEE Trans. Ind. Application , 1996, 32(4 :898~ 903.作者简介 :徐衍亮 , 男 ,1966年 12月生 , 博士 , 副教授 11989年、 1994年、2001年分别在山东工业大学、沈阳工业大学获得工学学士、工学硕士、工学博士学位 , 现在北京航空航天大学博士后流动站工作 , 主要研究方向 :特种电机及其控制 1第 5期徐衍亮 :电动汽车用永磁同步电动机功率特性及弱磁扩速能力研究 (一405。
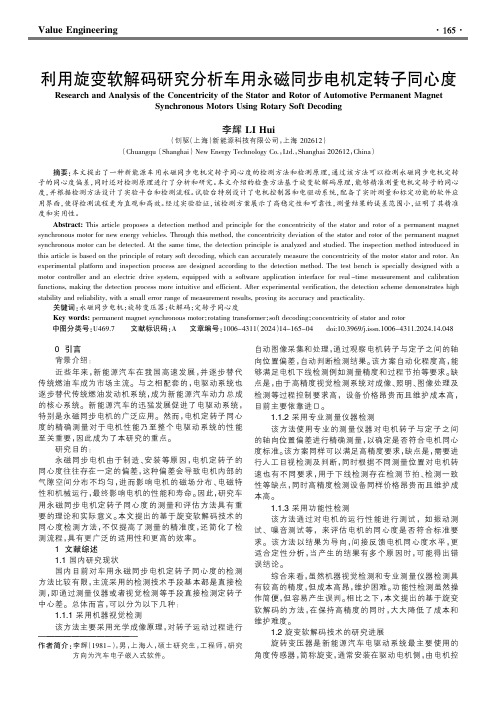
利用旋变软解码研究分析车用永磁同步电机定转子同心度
0引言背景介绍:近些年来,新能源汽车在我国高速发展,并逐步替代传统燃油车成为市场主流。
与之相配套的,电驱动系统也逐步替代传统燃油发动机系统,成为新能源汽车动力总成的核心系统。
新能源汽车的迅猛发展促进了电驱动系统,特别是永磁同步电机的广泛应用。
然而,电机定转子同心度的精确测量对于电机性能乃至整个电驱动系统的性能至关重要,因此成为了本研究的重点。
研究目的:永磁同步电机由于制造、安装等原因,电机定转子的同心度往往存在一定的偏差,这种偏差会导致电机内部的气隙空间分布不均匀,进而影响电机的磁场分布、电磁特性和机械运行,最终影响电机的性能和寿命。
因此,研究车用永磁同步电机定转子同心度的测量和评估方法具有重要的理论和实际意义。
本文提出的基于旋变软解码技术的同心度检测方法,不仅提高了测量的精准度,还简化了检测流程,具有更广泛的适用性和更高的效率。
1文献综述1.1国内研究现状国内目前对车用永磁同步电机定转子同心度的检测方法比较有限,主流采用的检测技术手段基本都是直接检测,即通过测量仪器或者视觉检测等手段直接检测定转子中心差。
总体而言,可以分为以下几种:1.1.1采用机器视觉检测该方法主要采用光学成像原理,对转子运动过程进行自动图像采集和处理,通过观察电机转子与定子之间的轴向位置偏差,自动判断检测结果。
该方案自动化程度高,能够满足电机下线检测例如测量精度和过程节拍等要求。
缺点是,由于高精度视觉检测系统对成像、照明、图像处理及检测等过程控制要求高,设备价格昂贵而且维护成本高,目前主要依靠进口。
1.1.2采用专业测量仪器检测该方法使用专业的测量仪器对电机转子与定子之间的轴向位置偏差进行精确测量,以确定是否符合电机同心度标准。
该方案同样可以满足高精度要求,缺点是,需要进行人工目视检测及判断,同时根据不同测量位置对电机转速也有不同要求,用于下线检测存在检测节拍、检测一致性等缺点,同时高精度检测设备同样价格昂贵而且维护成本高。