基于MATLAB实现二维delaunay三角剖分
有限元分析中的二维Delaunay三角网格剖分
有限元分析中的二维Delaunay三角网格剖分摘要本文从有限元分析出发,引出三角网格剖分的概念。
随后着重介绍了二维平面点集的Delaunay三角剖分。
给出了一些重要的Delaunay三角形的定理和性质,也体现出了Delaunay三角剖分的优点。
接着重点分析了构造二维Delaunay三角形的空洞算法,并用程序完成了它。
最后又分析了算法中的不足,并给出论文改进的方法。
关键词:Delaunay三角形,V oronoi图,网格剖分III1 第一章绪论1.1网格剖分的背景有限元分析是数学的一个分支。
其思想是将复杂的问题简单化,然后进行处理。
处理办法是将整个研究对象分成一些有限的单元,然后对每个小单元做相应的处理,最后整合起来去逼近原来的整个对象。
所以我们可以看到,有限元分析中将单元剖分的越小,得到的近似值就会越逼近真实值。
但是往往我们需要处理的对象很复杂,需要的计算量也很大,人工很难完成。
在早起年代,这个问题也阻止了有限元分析的发展。
近年来,随着计算机的发展,带动了一些需要大量计算的科学领域的发展。
有限元分析就是其中一种,因为当计算机取代人力之后,其快速的计算能力作用愈发凸显,人们只需要控制相应的算法即可。
作为最常用的处理手段,被大大的发展了之后,有限元分析也被应用于诸多方面。
早期的有限元分析主要应用与航空航天和地质、地球物理方面,现在越来越多的在工程分析计算和计算流体力学中看见。
图 1.1图 1.2常见的有限元分析可以分为六大步骤:问题及求解域的定义、求解域的网格剖分、确定状态变量及控制方法、单元推导、总装求解和结果解释。
上述步骤又可被分为三大阶段:前置处理、计算求解和后置处理。
而在前置处理中网格剖分作为最重要又最复杂的一个步骤,其处理结果制约着有限元的最后逼近结果。
网格剖分有很多形式:二维的主要剖分形状有三角形、四边形,三维的有四面体、六面体。
在有限元分析中网格剖分有如下要求:1、节点合法性。
指每个单元的节点最多只能是其他单元的节点或边界点,而不能是内点。
matlab 散点对平面三角划分
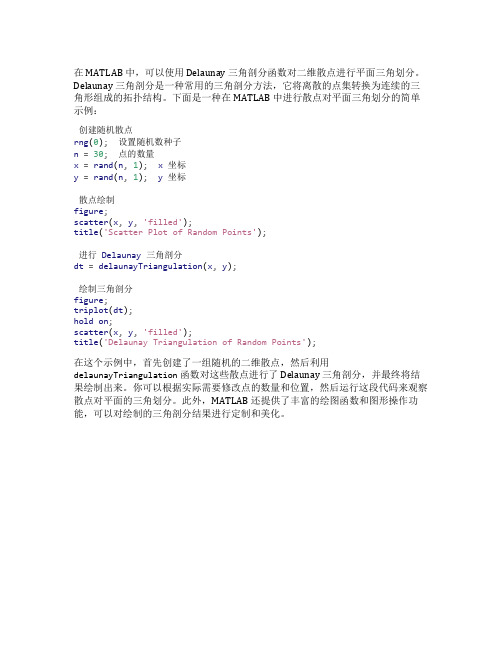
在 MATLAB 中,可以使用 Delaunay 三角剖分函数对二维散点进行平面三角划分。
Delaunay 三角剖分是一种常用的三角剖分方法,它将离散的点集转换为连续的三角形组成的拓扑结构。
下面是一种在 MATLAB 中进行散点对平面三角划分的简单示例:
创建随机散点
rng(0);设置随机数种子
n=30;点的数量
x=rand(n,1);x坐标
y=rand(n,1);y坐标
散点绘制
figure;
scatter(x,y,'filled');
title('Scatter Plot of Random Points');
进行Delaunay三角剖分
dt=delaunayTriangulation(x,y);
绘制三角剖分
figure;
triplot(dt);
hold on;
scatter(x,y,'filled');
title('Delaunay Triangulation of Random Points');
在这个示例中,首先创建了一组随机的二维散点,然后利用delaunayTriangulation函数对这些散点进行了 Delaunay 三角剖分,并最终将结果绘制出来。
你可以根据实际需要修改点的数量和位置,然后运行这段代码来观察散点对平面的三角划分。
此外,MATLAB 还提供了丰富的绘图函数和图形操作功能,可以对绘制的三角剖分结果进行定制和美化。
基于Delaunay三角剖分处理二维欧式空间MTSP的近似算法
基于Delaunay三角剖分处理二维欧式空间MTSP的近似算法寿涛;刘朝晖【摘要】This paper discussed Multi Travelling Salesman Problem (MTSP)on 2D Euclidean space.This problem could be simplified to solve several TSP by Delaunay Triangulation.It could be proven that the approximate ratio of Tree Decomposed Algorithm was 2 and the core proof was based on empty circle property of Delaunay edge.The paper testified the performance and efficiency of the algorithm by some numerical examples.%考虑了在二维欧式平面内的多旅行商问题,通过Delaunay三角剖分的方法,将问题转化为求解多个旅行商问题.树分解算法的核心是Delaunay边的空圆性质并且可以证明该算法的近似比为2.最后,通过数值模拟验证了算法的有效性.【期刊名称】《华东理工大学学报(自然科学版)》【年(卷),期】2017(043)006【总页数】4页(P895-898)【关键词】MTSP;Delaunay三角剖分;近似算法【作者】寿涛;刘朝晖【作者单位】华东理工大学数学系,上海200237;华东理工大学数学系,上海200237【正文语种】中文【中图分类】O224多旅行商问题(MTSP)是TSP问题的推广[1]。
通常可以把MTSP问题拆分成2个子问题,即:先确定每个旅行商访问客户点集;再对每个旅行商访问的点求解TSP问题。
对于MTSP问题的研究,最早可以追溯到1990年Li等[2]的5近似算法。
基于Delaunay三角剖分的机器人工作空间体积求解
基于Delaunay三角剖分的机器人工作空间体积求解蒲志新;王斌宇【摘要】针对传统方法求解并计算并联机器人工作空间体积计算量大效率低的问题,采用Delaunay三角剖分法求取工作空间的体积.利用Matlab编程进行仿真,将Delaunay三角剖分法与子空间体积叠加法和微分法对比.结果表明,在相同的计算机配置下,采用改进的增量式Delaunay三角剖分的算法计算其体积值为6.2645×105 mm3,并耗时21 min;采用二值法计算其体积为6.2639×105 mm3,耗时27 min;采用微元法计算其体积值为6.2643×105 mm3,并耗时31 min.改进的增量式Delaunay三角剖分法提高了求取工作空间的体积的效率.【期刊名称】《测控技术》【年(卷),期】2019(038)001【总页数】4页(P54-57)【关键词】并联机器人;Delaunay三角剖分;工作空间体积【作者】蒲志新;王斌宇【作者单位】辽宁工程技术大学机械工程学院,辽宁阜新123000;辽宁工程技术大学机械工程学院,辽宁阜新123000【正文语种】中文【中图分类】TP242并联机器人因刚度大、精度高、结构紧凑、承载能力强等特点[1]而被广泛应用。
并联机构工作空间体积与形状对于并联机构的工作能力有重要关系,因此并联机构工作空间体积通常作为判断机构好坏的指标[2-4],采用更加便捷的方法求解工作空间体积具有重要意义。
并联机器人工作空间三维体积计算常见方法有:微分法[5],即运用平行于X-Y面的平面将工作空间分割成厚度为ΔZ的微元,计算出每一微元的体积并将所有微元体相加得到的便是机构的工作空间体积;子空间体积叠加法[6],对Z值一定,厚度为ΔZ的子空间在X-O-Y平面投影并计算每个投影的面积,将面积相加并与剖面距离相乘可得到体积值。
上述方法为求解并联机构工作空间体积提供了理论依据,但在实际操作中,由于工作空间的不规则性,求解误差较大且需要对数据进行排序筛选等操作,编程及求解过程麻烦,运算量较大。
Delaunay三角剖分及MATLAB实例
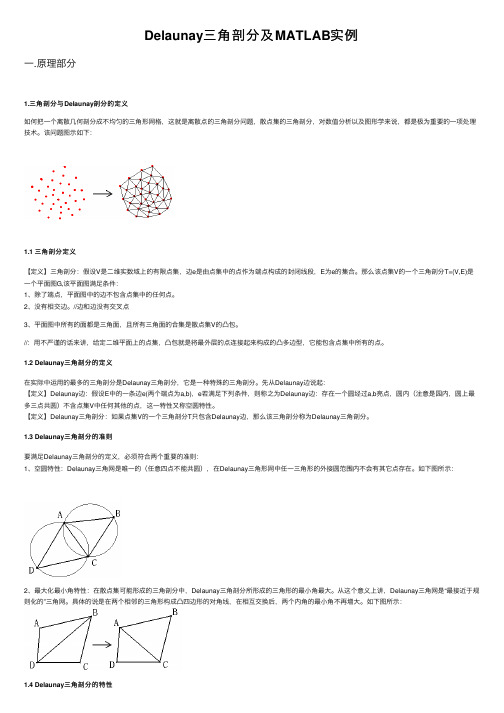
Delaunay三⾓剖分及MATLAB实例⼀.原理部分1.三⾓剖分与Delaunay剖分的定义如何把⼀个离散⼏何剖分成不均匀的三⾓形⽹格,这就是离散点的三⾓剖分问题,散点集的三⾓剖分,对数值分析以及图形学来说,都是极为重要的⼀项处理技术。
该问题图⽰如下:1.1 三⾓剖分定义【定义】三⾓剖分:假设V是⼆维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段,E为e的集合。
那么该点集V的⼀个三⾓剖分T=(V,E)是⼀个平⾯图G,该平⾯图满⾜条件:1、除了端点,平⾯图中的边不包含点集中的任何点。
2、没有相交边。
//边和边没有交叉点3、平⾯图中所有的⾯都是三⾓⾯,且所有三⾓⾯的合集是散点集V的凸包。
//:⽤不严谨的话来讲,给定⼆维平⾯上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有的点。
1.2 Delaunay三⾓剖分的定义在实际中运⽤的最多的三⾓剖分是Delaunay三⾓剖分,它是⼀种特殊的三⾓剖分。
先从Delaunay边说起:【定义】Delaunay边:假设E中的⼀条边e(两个端点为a,b),e若满⾜下列条件,则称之为Delaunay边:存在⼀个圆经过a,b亮点,圆内(注意是园内,圆上最多三点共圆)不含点集V中任何其他的点,这⼀特性⼜称空圆特性。
【定义】Delaunay三⾓剖分:如果点集V的⼀个三⾓剖分T只包含Delaunay边,那么该三⾓剖分称为Delaunay三⾓剖分。
1.3 Delaunay三⾓剖分的准则要满⾜Delaunay三⾓剖分的定义,必须符合两个重要的准则:1、空圆特性:Delaunay三⾓⽹是唯⼀的(任意四点不能共圆),在Delaunay三⾓形⽹中任⼀三⾓形的外接圆范围内不会有其它点存在。
如下图所⽰:2、最⼤化最⼩⾓特性:在散点集可能形成的三⾓剖分中,Delaunay三⾓剖分所形成的三⾓形的最⼩⾓最⼤。
从这个意义上讲,Delaunay三⾓⽹是“最接近于规则化的”三⾓⽹。
Delaunay三角剖分的问题
Delaunay三⾓剖分的问题最近接触到计算Delaunay三⾓剖分的问题,也算是计算⼏何的⼀个经典问题了。
按照别⼈的算法,也⾃⼰实现了个,发现点集⼤的时候,程序计算起来特慢。
后来分析发现,别⼈程序号称的都是O(nlogn)的,我的却成了O(n*n)的,算法都是⼀样,后来才发现是数据结构的问题,看来程序=算法+数据结构,有道理。
闲着,就整理了些相关知识,组织如下:1.Delaunay三⾓剖分&Voronoi图定义2.计算Delaunay三⾓剖分的算法及分析3.例⼦程序&代码⼤话点集的三⾓剖分(Triangulation),对数值分析(⽐如有限元分析)以及图形学来说,都是极为重要的⼀项预处理技术。
尤其是Delaunay三⾓剖分,由于其独特性,关于点集的很多种⼏何图都和Delaunay三⾓剖分相关,如Voronoi图,EMST 树,Gabriel图等。
Delaunay三⾓剖分有⼏个很好的特性:1.最⼤化最⼩⾓,“最接近于规则化的“的三⾓⽹。
2.唯⼀性(任意四点不能共圆)。
概念及定义⼆维实数域(⼆维平⾯)上的三⾓剖分定义1:假设V是⼆维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段, E为e的集合。
那么该点集V的⼀个三⾓剖分T=(V,E)是⼀个平⾯图G,该平⾯图满⾜条件:1.除了端点,平⾯图中的边不包含点集中的任何点。
2.没有相交边。
3.平⾯图中所有的⾯都是三⾓⾯,且所有三⾓⾯的合集就是点集V的凸包。
那什么是Delaunay三⾓剖分呢?不过是⼀种特殊的三⾓剖分罢了。
从Delaunay边说起。
Delaunay边定义2:假设E中的⼀条边e(两个端点为a,b),e若满⾜下列条件,则称之为Delaunay边:存在⼀个圆经过a,b两点,圆内不含点集V中任何的点,这⼀特性⼜称空圆特性。
Delaunay三⾓剖分定义3:如果点集V的⼀个三⾓剖分T只包含Delaunay边,那么该三⾓剖分称为Delaunay三⾓剖分。
基于Delaunay三角剖分的二维交互建模研究
第43卷第2期物探化探计算技术Vol.43No.2 2021年3月COMPUTING TECHNIQUES FOR GEOPHYSIC A L AND GEOCHEMIC A L EXPLORATION Mar.2021文章编号:1001-1749(2021)02-025605基于Delaunay三角剖分的二维交互建模研究杨强(中国石化石油物探技术研究院,南京211103)摘要:准确合理的地质模型是地震正演模拟的基础。
简单的层状结构建模方法无法描述复杂的地质模型的拓扑结构,基于块体的地质建模方法可以描述断层、尖灭、透镜体等多种复杂地质结构,但建模方法实现比较难。
这里提出了一种解决方案,该方法基于Delaunay的地质建模方法,采用带约束的Delaunay三角剖分对复杂模型三角化,在此基础上,以原始线段为索引对剖分结果进行递归查找,形成多边形拓扑结构图和封闭多边形组,再对封闭多边形进行网格化。
通过理论和实际模型,验证了本方法的可行性。
关键词:地震正演;建模;Delaunay三角剖分中图分类号:TP391.41文献标志码:A 0引言地震勘探中,正演模拟不但在地震数据采集中得到应用,在地震资料处理和地震资料解释中也是重要的验证技术手段,是进行地震反演的基础。
而正演模拟的基础就是需要准确且合理的地质模型,因此建模是地震正演的重要基础。
传统上地质模型都沿用Cenveny提出的模型结构,即所谓层状结构模型。
它要求每一个分界面都必须从模型体的左边界贯穿到模型体的右边界,分界面按顺序由上到下依序排列,不得交叉。
对于逆断层、尖灭、透镜体等复杂地层情况,只能人为地简化模型,从而满足层状模型。
在实际的地球物理勘探中,层状结构模型有两个严重不足:①在采集、处理、解释各阶段的模型大都有逆断层、尖灭、透镜体等复杂地质元素,层状结DOI:10.3969/j.issn.1001-1749.2021.02.16构模型无法准确描述复杂的地质拓扑结构,从而无法得到网格化模型;②处理中的叠前深度偏移速度建模以及地震解释构造建模等,都要求能够交互修改模型,交互编辑中的层位修改及移动必须遵循层状规则,这对交互式复杂建模而言很困难,也不便利。
基于约束Delaunay三角剖分进行数模建
基于约束Delaunay三角剖分进行数模建摘要分析了各种三角网生成算法,选定逐点插入算法进行三角构网,并对该算法进行了优化处理。
在数据点集不变的情况下,提出了交换对角线的算法以进行数字地面模型的建构,使得数模成果真实地反映了地面情况。
关键词数字地面模型Delaunay 三角网约束边嵌入算法1 前言数字地面模型(Digital Terrain Modal,简称DTM)是地表勘测成果的数字化表现形式,它广泛应用于公路勘测设计一体化、地理信息系统等领域中。
其主要实现形式是不规则三角网(Triangulation Irregular Net,简称TIN)。
Delaunay三角网〔1〕具有空外接圆,以及最小角最大的性质,可最大限度的保证网中三角形满足近似等边(角)性,避免了过于狭长和尖锐的三角形的出现,是公认的最优三角网。
鉴于此,对二维域内点集进行Delaunay三角剖分是当今流行的TIN构网技术。
本文主要介绍了用逐点插入算法来生成Delaunay三角网,并讨论了如何在不改变点集的情况下实现约束边的嵌入,这符合数据采集及数模生成的规则,可以方便地处理地表上的陡坎线、断裂线等,真实地反映地表情况。
2 建立无约束三角网关于Delaunay三角网的生成算法,已经有了二十多年的研究,现在已趋于成熟,其主流算法有三种:分割-归并法,逐点插入法,三角网生长法。
其中三角网生长法已不常见,分割-归并法和逐点插入法各有优缺点,分治算法由于递归执行,因而需要较大的内存空间,消耗系统资源,但时间复杂度要好。
逐点插入法实现简单,占用内存较小,其时间复杂度差一些,但可以从数据的组织和管理上采用新方法,使之在时间和空间上达到最佳,并且逐点插入是一种动态剖分方法,有利于以后对DTM的维护和更新,是一种较好的构建DTM的剖分方法。
综合分析各算法,本文采用逐点插入法进行构网,分析了该算法中制约运行速度的因素,在数三角网拓扑关系、三角形的查找、LOP算法(Local Optimization Procedure)等方面进行了优化处理,使之有了较高的执行效率。
基于Delaunay三角剖分的ICP算法研究与实现
第19卷第5期测绘工程Vol.19.52010年10月ENGINEERING OF SURV EYING AND MAPPIN GOct.,2010基于Delaunay 三角剖分的ICP算法研究与实现龚子桢1,2,花向红1,2,义崇政1,2,杨荣华1,2(1.武汉大学测绘学院,湖北武汉430079; 2.武汉大学灾害监测与防治研究中心,湖北武汉430079)摘要:针对I CP 迭代点云配准算法,利用MATLAB 中封装的三角剖分函数,迅速搜索迭代过程中的最近点,简化ICP 配准算法的实现,并设计一种模拟实验的方法验证算法的有效性。
实验表明,利用基于三角剖分的ICP 迭代算法可以达到较好的配准精度。
关键词:Delaunay 三角剖分;点云配准;ICP 算法;效果分析中图分类号:T P391文献标志码:A文章编号:10067949(2010)05002903The research and implementation of ICP based on Delaunay triangulationGONG Zi zhen 1,2,H U A Xiang hong 1,2,YI Chong zheng 1,2,YA NG Rong hua 1,2(1.School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China; 2.Research Center for Hazard M onitoring and Pr evention,Wuhan Univer sity,Wuhan 430079,China)Abstr act:Based on Delaunay triangulation,the implementation of ICP point clo ud registratio n algorithm could be easier by the way of using MA TLAB.For demonstrating the validity of this method,some simulant tests are also carried out.The result sho ws that this kind of technique could achieve high accuracy of registration.Key words:Delaunay triangulation;point cloud r egistration;ICP;effectiveness analysis收稿日期基金项目云南省省院省校科技合作项目(6YX36);精密工程与工业测量国家测绘局重点实验室开放基金资助项目(F )作者简介龚子桢(),男,硕士研究生在三维激光扫描数据采集过程中,因为建筑物及地理位置的限制,要获得目标物的完整三维点云数据,必须从多个视点对目标物进行扫描,然后利用不同视点数据之间的关系获取精确的变换关系,将点云数据转换到统一的坐标系。
图形算法-Delaunay三角剖分算法
[图形算法]Delaunay三角剖分算法1. 三角剖分与Delaunay剖分的定义如何把一个散点集合剖分成不均匀的三角形网格,这就是散点集的三角剖分问题,散点集的三角剖分,对数值分析以及图形学来说,都是极为重要的一项预处理技术。
该问题图示如下:1.1.三角剖分定义【定义】三角剖分:假设V是二维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段, E为e的集合。
那么该点集V的一个三角剖分T=(V,E)是一个平面图G,该平面图满足条件:1.除了端点,平面图中的边不包含点集中的任何点。
2.没有相交边。
3.平面图中所有的面都是三角面,且所有三角面的合集是散点集V的凸包。
1.2. Delaunay三角剖分的定义在实际中运用的最多的三角剖分是Delaunay三角剖分,它是一种特殊的三角剖分。
先从Delaunay边说起:【定义】Delaunay边:假设E中的一条边e(两个端点为a,b),e若满足下列条件,则称之为Delaunay边:存在一个圆经过a,b两点,圆内(注意是圆内,圆上最多三点共圆)不含点集V中任何其他的点,这一特性又称空圆特性。
【定义】Delaunay三角剖分:如果点集V的一个三角剖分T只包含Delaunay边,那么该三角剖分称为Delaunay三角剖分。
1.3.Delaunay三角剖分的准则要满足Delaunay三角剖分的定义,必须符合两个重要的准则:1、空圆特性:Delaunay三角网是唯一的(任意四点不能共圆),在Delaunay三角形网中任一三角形的外接圆范围内不会有其它点存在。
如下图所示:2、最大化最小角特性:在散点集可能形成的三角剖分中,Delaunay三角剖分所形成的三角形的最小角最大。
从这个意义上讲,Delaunay三角网是“最接近于规则化的“的三角网。
具体的说是指在两个相邻的三角形构成凸四边形的对角线,在相互交换后,六个内角的最小角不再增大。
如下图所示:1.4.Delaunay三角剖分的特性以下是Delaunay剖分所具备的优异特性:1.最接近:以最近临的三点形成三角形,且各线段(三角形的边)皆不相交。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
34
基于MATLAB 实现二维delaunay 三角剖分
刘锋涛 凡友华
(哈尔滨工业大学深圳研究生院 深圳 518055)
【摘要】在已知凸多边形的顶点坐标的前提情况下,利用MATLAB 中的meshgrid 函数产生多边
形附近矩形区域内的网格点的坐标,然后再利用inpolygon 函数判断哪些点位于多边形内和哪
些点位于多边形的边界上。
在此基础上利用delaunay 函数来完成delaunay 三角剖分。
【关键词】delaunay 三角剖分;MATLAB
网格划分是有限元分析前处理中的关键步骤,网格划分的密度以及质量对有限元计算的精度、效率以及收敛性有着重要的影响作用。
自20世纪70年代开始,关于有限元网格生成方法的研究已经取得了许多重要成果,提出许多有效的算法。
Ho-Le 对网格生成方法进行了系统的分类[1]。
许多学者也对网格生成的方法进行了综述,如我国的学者胡恩球等[2]、关振群等[3]。
Delaunay 三角剖分(简称DT)是目前最流行的通用的全自动网格生成方法之一。
DT 有两个重要特性:最大-最小角特性和空外接圆特性。
DT 的最大-最小角特性使它在二维情况下自动地避免了生成小内角的长薄单元。
因此特别适用于有限元网格生成。
大体上可将DT 算法分为三大类:分治算法,逐点插入法和三角网生长法。
经典DT 技术已经相当成熟,近年来的研究重点是约束DT 的边界恢复算法,以及如何克服算法退化现象所产生的薄元(sliver element)问题[3]。
然而,实现DT 有限元网格生成,对于非计算机图形学专业的工程师来说还是很复杂的。
在处理一些对有限元网格划分质量不过的问题时,如极限分析的有限元方法,可以采用一些更为简单的方法来实现。
在Matlab 计算软件中,已有一个成熟的函数delaunay 可以实现对一系列点的DT 划分。
因此,本文基于Matlab 的delaunay 等一些函数来完成一个凸多边形的DT 网格划分。
1 MATLAB 中的函数
1.1 delaunay 函数
delaunay 函数可以按照DT 网格划分的要求将一个点集中的点划归某一个有限网格所有。
它在Matlab 中的用法如下:
=delaunay(,) or,
=delaunay(,,)TRI x y TRI x y options
其输入为点集中所有点的横、纵坐标向量x 和y ,返回值为一个3m ×的矩阵,矩阵中每一行表示DT 网格中一个三角形网格的三个顶点。
1.2 meshgird 函数
为了在任意凸多边形内产生一个点集,可以利用Matlab 中的meshgrid 命令。
其用法如下:
[,] = meshgrid(,)X Y x y
其输入为矩形的x、y方向上的范围,输出为两个向量,分别表示x和y方向上满足一定间距的点的坐标。
1.3 inpolygon函数
inpolygon函数的作用是判断一个点是否存在于一个多边形内。
它的用法是,
[] = inpolygon(,,,)
IN ON X Y xv yv
其输入值X和Y分别表示点集中每个点的x和y坐标值,而xv和yv则分别表示多边形定点的x和y坐标值。
若点集中某一点在多边形内则其返回值IN为1,若不在则IN为0,若某一点在多边形的边界上则ON为1,若不在边界上则ON为0。
1.4 基于MATLAB的简单DT方法
在MATLAB中,基于delaunay函数、meshgrid函数和inpolygon函数完成DT网格划分的步骤是:
(1)定义一个多边形,并求出多边形顶点最大的x、y坐标值。
(2)以最大的x、y坐标值作为x和y方向上的长度构造一个矩形。
(3)利用meshgrid函数在构造的矩形区域内构造出一个点集,其密度可以根据需要进行加密。
(4)利用inpolygon函数判断点和多边形的位置关系,求出位于多边形内和边界上的点。
(5)再利用delaunay函数将在多边形内和边界上的点进行三角形划分,之后,可以利用trimesh函数将图形绘制出,并可以得出三角形的顶点坐标和编号。
2 一个简单的例子
任意定义一个凸多边形,如图1。
按照2.4节中的步骤,对其进行网格划分,划分结果见图2。
部分主要的程序见附录。
图1 定义的多边形图2 delaunay网格划分结果从图2中,可以看出凸多边形内部的三角形划分结果比较理想,但是边界处出现了很薄的三角形单元,并且内部的网格划分的密度一致。
然而,对于一些对网格质量要求不高的具体问题还是可以忍受的。
3 讨论
此种方法主要是基于Matlab中现有的函数命令来实现DT网格划分的,因此对于那些不熟悉计算机图形学基础知识的工程技术人员而言,很容易掌握并自己编程实现。
这也是使
35
用该方法的主要目的。
然而,在此方法中还存在着几个问题:
(1)此种方法只能用于凸多边形的DT划分;
(2)网格划分结果不能实现在同一个区域内不同网格密度的划分;
(3)边界处网格划分的结果不理想,有很薄的三角形单元出现。
若对以上三个要求的不高,则此种方法可以发挥其简单易用的优势,使DT网格划分技
术更加容易掌握。
参考文献
[1] K. Ho-Le. Finite element mesh generation method: A review and classification. Computer Aided
Design, 1988, 20(1): 27~38
[2] 胡恩球, 张新访, 向文, 周济. 有限元网格生成方法发展综述. 计算机辅助设计与图形学学报. 1997,
9(4): 378~383
[3] 关振群, 宋超, 顾元宪, 隋晓峰. 有限元网格生成方法研究的新进展. 计算机辅助设计与图形学学报.
2003, 15(1): 1~14 ――――――――――――――――――――――――――――――――――――――――――――――《工程地质计算机应用》征稿启事
《工程地质计算机应用》杂志自2008年由河海大学科学研究院负
责编辑出版发行,现已发行三期(总第51期),感谢各位作者和各家
单位的支持,希望大家一如既往的关注本杂志,踊跃投稿。
投稿信箱如下:
电子邮箱1: geocom05@
电子邮箱2: hetc@
电子邮箱3: wjhfish@
《工程地质计算机应用》编辑部 36。