除氧器水位三冲量调节
汽包水位三冲量给水调节的工作原理
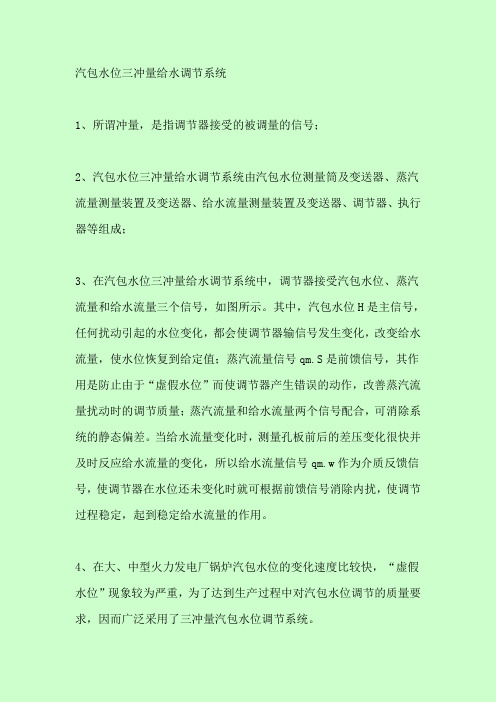
汽包水位三冲量给水调节系统1、所谓冲量,是指调节器接受的被调量的信号;2、汽包水位三冲量给水调节系统由汽包水位测量筒及变送器、蒸汽流量测量装置及变送器、给水流量测量装置及变送器、调节器、执行器等组成;3、在汽包水位三冲量给水调节系统中,调节器接受汽包水位、蒸汽流量和给水流量三个信号,如图所示。
其中,汽包水位H是主信号,任何扰动引起的水位变化,都会使调节器输信号发生变化,改变给水流量,使水位恢复到给定值;蒸汽流量信号qm.S是前馈信号,其作用是防止由于“虚假水位”而使调节器产生错误的动作,改善蒸汽流量扰动时的调节质量;蒸汽流量和给水流量两个信号配合,可消除系统的静态偏差。
当给水流量变化时,测量孔板前后的差压变化很快并及时反应给水流量的变化,所以给水流量信号qm.w作为介质反馈信号,使调节器在水位还未变化时就可根据前馈信号消除内扰,使调节过程稳定,起到稳定给水流量的作用。
4、在大、中型火力发电厂锅炉汽包水位的变化速度比较快,“虚假水位”现象较为严重,为了达到生产过程中对汽包水位调节的质量要求,因而广泛采用了三冲量汽包水位调节系统。
5、关于测量信号接入调节器的极性说明:当信号值增大时要求开大调节阀,该信号标以“”号;反之,当信号值减小时要求关小调节阀,该信号标以“-”号。
在给水调节系统中,当蒸汽流量信号增大时,要求开大调节阀,该信号标以“”号;给水流量信号增大时,要求关小调节阀,该信号标以“-”号;当汽包水位升高时,差压减小,水位测量信号减小,要求关小调节阀,则该信号标以“”号。
直流炉没有三冲量啊,没有汽包,在直流状态下给多少水就产生多少汽的,是通过中间点温度来调整锅炉燃水比的!单冲量三冲量切换条件:一般用给水流量来划分,小于200t/h(30%,我们300MW机组就是这样)时为单冲量,大于则为三冲量为啥要到30%负荷时,电泵由单冲量切到三冲量啊?要防止汽包的虚假水位。
在低负荷的时候,单冲量主要是给系统上水,在高负荷时,给水的任务就是维持汽包水位。
除氧器液位波动原因分析及处理措施

负荷运行时 5分钟需要的水 量。不 管电厂负荷如何变化 , 除氧器水 位控制 的功能就是保证 除氧器贮水 箱 中的水 位
恒定在 3 3 8 0 mm, 确 保 除氧 器 的 水 位 控 制 正 常 对 机 组 的 安
全 运 行 有 着 重 要 的意 义 。
2 . 2 凝汽 器排水 阀异常开 启 故障现象 : 凝 汽器液位低 于排水设定值 , 但是排水 阀
三 个 位 置 “ L C V 4 2 0 7 # 1 , # 2 ; L C V 4 2 0 7 # 1 , # 3 ; L C V4 2 0 7 # 2 ,
处理措施 :操作时应及时处理低加旁路阀电动 开度 , 确认低加旁 路 阀开 ; 若低旁 通 阀不打开 电场 , 则是操作人 员手动摇动低 电阀 门旁路 。 2 . 4 5号 高加 常疏 阀异 常关 闭
摘 要: 除 氧 器 液位 是机 组 运 行 的 一 个 重 要 的 控 制 参 数 , 因为 除 氧 器 液 位 过 低 , 则 可 能 导 致 给 水 泵 汽蚀 , 并触发反应堆线性降功率 , 而 除 氧 器液 住 过 高则会 淹 没 除氧 头 , 不但 影 响 除氧 效 果 , 还 可 能使 给 水 经 抽 汽 管 线 倒 流 至 汽轮 机 , 引起 水 击 事 故 , 损 坏 汽 机 。我 厂 除 氧 器
的液 位 控 制 采 用 的 是 三 冲 量 P I D调 节. 较好 的 实现 了 除氧 器的 液 位 自动 控 制 。 关键词 : 除氧器 ; 液位波动 ; 原 因分 析 ; 处理 措 施 中 图分 类 号 : T M6 2 3 文献标志码 : A 文章 编 号 : 1 6 7 2 — 3 8 7 2 ( 2 0 1 7 ) 0 9 — 0 0 5 5 一 O 2
汽包水位三冲量调节系统

汽包水位三冲量调节系统
汽包水位三冲量调节系统是指汽包水位、蒸汽流量和给水流量三个信号作用于调节器上,即三个被控变量对应一个调节器。
工作原理:汽包水位作为主信号,水位变化,调节器输出发生变化,继而改变给水流量,使水位恢复到给定值;
蒸汽流量作为前馈信号,防止“虚假水位”使调节器产生错误的动作;
给水流量作为反馈信号,使调节器在水位还未变化时就可根据前馈信号消除内扰,
使调节过程稳定,起到稳定给水流量的作用。
调节过程:根据串级控制系统选择主、副控制器的正、反作用的原则,水位控制器LC反作用选反作用,流量控制器FC为正作用,调节器为气关阀。
当水位由于扰动而升高时,因LC反作用,它的输出下降,进入加法器后,使FC给定值减小而输出增加,调节
阀的开度减小,给水流量FA2101减小,水位下降,保持在设定值上;当蒸汽流量
FAQ2102增加时,FC给定值增加而输出减小,调节阀的开度增加,给水流量增加,保持水蒸汽平衡,使水位不;副回路克服给水自身的扰动,要进一步地稳定了水位
的自动控制;给水流量FA2101增加,FC输出增加,调节阀的开度减小,给水量减
小,从而保持水蒸汽平衡。
三冲量控制分析
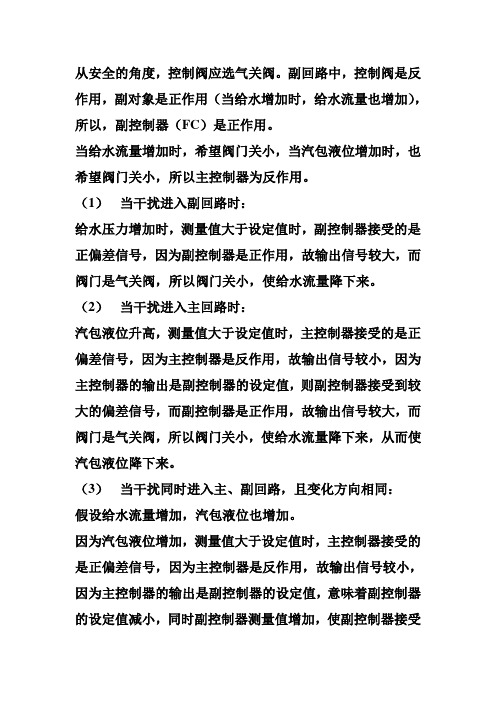
从安全的角度,控制阀应选气关阀。
副回路中,控制阀是反作用,副对象是正作用(当给水增加时,给水流量也增加),所以,副控制器(FC)是正作用。
当给水流量增加时,希望阀门关小,当汽包液位增加时,也希望阀门关小,所以主控制器为反作用。
(1)当干扰进入副回路时:给水压力增加时,测量值大于设定值时,副控制器接受的是正偏差信号,因为副控制器是正作用,故输出信号较大,而阀门是气关阀,所以阀门关小,使给水流量降下来。
(2)当干扰进入主回路时:汽包液位升高,测量值大于设定值时,主控制器接受的是正偏差信号,因为主控制器是反作用,故输出信号较小,因为主控制器的输出是副控制器的设定值,则副控制器接受到较大的偏差信号,而副控制器是正作用,故输出信号较大,而阀门是气关阀,所以阀门关小,使给水流量降下来,从而使汽包液位降下来。
(3)当干扰同时进入主、副回路,且变化方向相同:假设给水流量增加,汽包液位也增加。
因为汽包液位增加,测量值大于设定值时,主控制器接受的是正偏差信号,因为主控制器是反作用,故输出信号较小,因为主控制器的输出是副控制器的设定值,意味着副控制器的设定值减小,同时副控制器测量值增加,使副控制器接受到更大的偏差,副控制器是正作用控制器,则输出更大的信号,作用在气关阀上,则阀门关得更小,使汽包液位和给水流量都降了下来。
(4)当干扰同时进入主、副回路,且变化方向相反:假设给水流量增加,汽包液位减小。
因为汽包液位减小,测量值小于设定值时,主控制器接受的是负偏差信号,因为主控制器是反作用,故输出信号较大,因为主控制器的输出是副控制器的设定值,意味着副控制器的设定值增加,同时副控制器测量值增加,如果二者增量相同,则抵消了,阀门不用动;如果二者增量不同,阀门只需稍动一点就可以了。
(5)在三冲量控制中,蒸汽流量是前馈量,前馈控制具有超前控制的特点,即蒸发量波动时,其改变量直接控制调节阀的开度,而不会影响到被控变量的变化,使控制更及时。
除氧器液位波动原因分析及处理措施

除氧器液位波动原因分析及处理措施摘要:除氧器正常运行时给蒸汽发生器提供水源,除氧器液位的稳定对保证堆芯的冷却具有重要的意义。
除氧器液位是机组运行的一个重要的控制参数,因为除氧器液位过低,则可能导致给水泵汽蚀,并触发反应堆线性降功率,而除氧器液住过高则会淹没除氧头,不但影响除氧效果,还可能使给水经抽汽管线倒流至汽轮机,引起水击事故,损坏汽机。
关键词:除氧器;液位波动;原因分析;处理措施不论在常规火电厂还是在核电厂中,除氧器液位都是机组运行的一个重要控制参数。
但是由于其存在着较大的延迟特性,除氧器进口存在较多的进水流量来源以及除氧器出口给水流量随着功率的变化而变化等特性,单纯依靠除氧器液位信号对除氧器液位进行控制,已不能满足系统对稳定性、快速性和准确性的要求,往往会引起超调量过大,甚至振荡的情况。
1除氧器液位控制1.1除氧器液位控制模式除氧器水位控制系统的目的是保持除氧器储水箱的水位恒定。
系统包括三个水位控制阀和三个水位控制器,每一个控制阀和控制器都有各自的水位变送器监测除氧器储水箱的水位。
手动开关64321一HS4410A有三个位置“LT4410A,LT4410B,LT4410C”,用来选择三个水位控制器的主、从位置。
当选定一个位置时,两个控制器投入运行:一个控制器在AUTO位置,一个控制器在STANDBY位置。
在AUTO位置的水位控制器用于调节两个由控制开关64321-HS4410C选定在AUTO位置的水位控制阀,在STANDBY位置的水位控制器控制剩下的一个在STANDBY位置的水位控制阀。
STANDBY通道(LT/LC)在除氧器低水位时投入运行。
手动开关64321一HS4410C有三个位置“LCV4207#1,#2;LCV4207#1,#3;LCV4207#2,#3”,用来选择将AUTO/STANDBY水位控制器的控制信号送至相应的水位控制阀。
1.2除氧器液位控制器除氧器液位控制采用的是三冲量、内部串级加前馈的控制方式,三台控制器内部参数设定完全一致。
三冲量汽包水位控制原理及应用教程
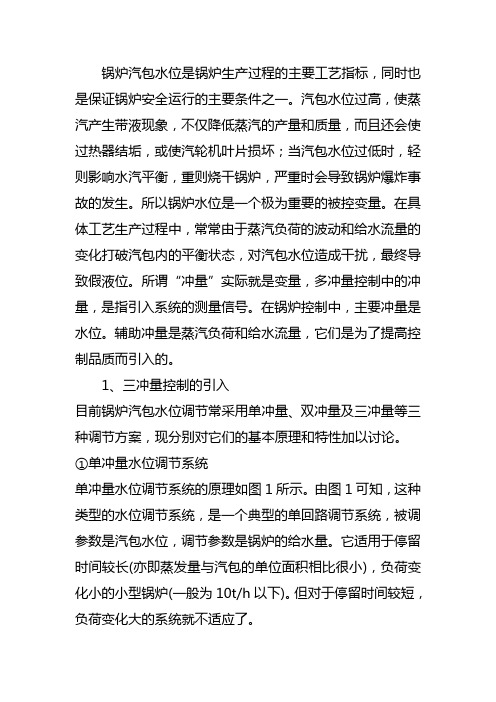
锅炉汽包水位是锅炉生产过程的主要工艺指标,同时也是保证锅炉安全运行的主要条件之一。
汽包水位过高,使蒸汽产生带液现象,不仅降低蒸汽的产量和质量,而且还会使过热器结垢,或使汽轮机叶片损坏;当汽包水位过低时,轻则影响水汽平衡,重则烧干锅炉,严重时会导致锅炉爆炸事故的发生。
所以锅炉水位是一个极为重要的被控变量。
在具体工艺生产过程中,常常由于蒸汽负荷的波动和给水流量的变化打破汽包内的平衡状态,对汽包水位造成干扰,最终导致假液位。
所谓“冲量”实际就是变量,多冲量控制中的冲量,是指引入系统的测量信号。
在锅炉控制中,主要冲量是水位。
辅助冲量是蒸汽负荷和给水流量,它们是为了提高控制品质而引入的。
1、三冲量控制的引入目前锅炉汽包水位调节常采用单冲量、双冲量及三冲量等三种调节方案,现分别对它们的基本原理和特性加以讨论。
①单冲量水位调节系统单冲量水位调节系统的原理如图1所示。
由图1可知,这种类型的水位调节系统,是一个典型的单回路调节系统,被调参数是汽包水位,调节参数是锅炉的给水量。
它适用于停留时间较长(亦即蒸发量与汽包的单位面积相比很小),负荷变化小的小型锅炉(一般为10t/h以下)。
但对于停留时间较短,负荷变化大的系统就不适应了。
图1 单冲量水位调节原理图2 单冲量水位调节系统控制策略从图2可以看出:单冲量水位调节系统控制策略由汽包水位测量差压变送器、PID调节器和调节阀(或变频器)构成。
当蒸汽负荷突然大幅度增加时,由于汽包内蒸汽压力瞬间下降,水的沸腾加剧,汽泡量迅速增加,汽泡不仅出现于水的表面,而且出现于水面以下,由于汽泡的体积比水的体积大许多倍,结果形成汽包内液位升高的现象。
因为这种升高的液位不代表汽包内储液量的真实情况,所以称为“假液位”。
此时PID调节器会错误地认为测量值升高,从而关小给水调节阀,减小给水量。
等到这种暂时汽化现象一旦平稳下来,由于蒸汽量的增加,给水量反而减少,会使水位严重下降,甚至降到液位危险区,造成事故。
汽包水位三冲量调节系统
汽包水位三冲量调节系统是指汽包水位、蒸汽流量和给水流量三个信号作用于调节器上,即三个被控变量对应一个调节器。
工作原理:汽包水位作为主信号,水位变化,调节器输出发生变化,继而改变给水流量,使水位恢复到给定值;
蒸汽流量作为前馈信号,防止“虚假水位”使调节器产生错误的动作;
给水流量作为反馈信号,使调节器在水位还未变化时就可根据前馈信号消除内扰,
使调节过程稳定,起到稳定给水流量的作用。
调节过程:根据串级控制系统选择主、副控制器的正、反作用的原则,水位控制器LC反作用选反作用,流量控制器FC为正作用,调节器为气关阀。
当水位由于扰动而升高时,因LC反作用,它的输出下降,进入加法器后,使FC给定值减小而输出增加,调节
阀的开度减小,给水流量FA2101减小,水位下降,保持在设定值上;当蒸汽流量
FAQ2102增加时,FC给定值增加而输出减小,调节阀的开度增加,给水流量增加,保持水蒸汽平衡,使水位不;副回路克服给水自身的扰动,要进一步地稳定了水位
的自动控制;给水流量FA2101增加,FC输出增加,调节阀的开度减小,给水量减
小,从而保持水蒸汽平衡。
机组运行知识
机组运行知识
600MW直流机组,RB、FCB和除氧器水位单、三冲量的切换都有涉及到。
1、RB是指机组重要辅机发生故障时机组快速降负荷到适合当时机组所能带动的负荷点,比例两台空预器中的一台停运,则机组快速降负荷至300MW;
2、FCB指的是机组停机不停炉方式,即机组汽轮机或者发电机发生故障,但是故障能马上消除的情况下,可以实现FCB功能,机组介质通过旁路系统打循环,但是FCB功能成功有一个负荷点,当机组当前负荷低于240MW时才会触发;
3、除氧器水位单冲量是指除氧器水位单PID控制,即测量值为除氧器水位,设定指手动给定,所谓三冲量是指除氧器水位、凝结水至除氧器流量、主给水流量三个量,采用串及PID控制除氧器水位,主PID的测量值为除氧器水位、设定值手动给定、输出指令为副PID的设定值即凝结水至除氧器流量设定值,主给水流量作为主PID的前馈信号,副PID的测量值为凝结水至除氧器流量测量值,输出指令为除氧器水位调节阀指令信号,单冲量、三冲量切换条件为机组负荷大于180MW自动切换为三冲量控制。
第六章 除氧器控制系统
4
North China Electric Power University
第六章 除氧器控制系统
§6-2 除氧器压力 控制系统
5
North China Electric Power University
第六章 除氧器控制系统
要使除氧器除氧效果好,就应该将水加热到沸点温 度。由于温度测量存在较大的延迟,而饱和压力和饱和 温度间有一一对应关系,所以一般采用控制除氧器蒸汽 温度间有一一对应关系,所以一般采用控制除氧器蒸汽 空间的压力来达到控制给水加热至饱和温度的目的。 空间的压力来达到控制给水加热至饱和温度的目的。 当除氧器压力超过原先的饱和压力时,开始由于除 氧器水箱的热容量大,水的温度不会上升,从而使水进 入未饱和状态,水中的含氧量相应地增加;随后由于除 氧器排汽口阀门开度是根据额定压力调整试验确定的, 运行中不再调整,在压力长时间高于额定压力时,排汽 量必然很大,这就造成额外的汽水损失和热损失。如果 除氧器压力偏低,说明加热蒸汽不足,故给水达不到饱 和温度而具有较高的含氧量。
16
North China Electric Power University
第六章 除氧器控制系统
(2) 若凝汽器为高水位运行,可除氧器水位应与凝 若凝汽器为高水位运行,可除氧器水位应与凝 汽器水位控制一起考虑。 例如, 如凝汽器为高水位运行,所以控制方案是: 例如, 如凝汽器为高水位运行,所以控制方案是:采 用改变凝结水流量来控制除氧器水位, 用改变凝结水流量来控制除氧器水位,采用改变化学补充 水量来控制凝汽器水位。 水量来控制凝汽器水位。
6
North China Electric Power University
第六章 除氧器控制系统
除氧器压力对象可作为一阶惯性环节来处理,在除 氧器加热蒸汽阀开度作阶跃变化时,由于连接管路很短, 所以除氧器内部压力立即随之变化,只是除氧器体积较 大,其压力变化过程将是缓慢的。 目前,除氧器系统有单台运行和多台并列运行两种。 对并列运行的各台除氧器,采用平衡管将蒸汽空间相连 接,饱和水空间也由水平衡管连接。对于压力控制则以 平衡管压力为被调量,设计与单台除氧器独立运行一样 的单回路控制系统。
除氧器水位控制及凝汽器热井水位控制
除氧器水位及凝汽器热井水位控制系统策略的优化除氧器是整个单元机组给水加热系统中唯一的缓冲环节,其水位是机组运行需监控的几个最重要的参数之一,除氧器水位过高,影响除氧效果;水位过低又将危及给水泵的安全运行。
因此,精确控制除氧器水位对单元机组的正常运行是必须的,而好的控制策略和对应策略内的参数整定精准是实现单元机组除氧器水位正常的保证。
一、一般意义的除氧器水位控制方案:除氧器水位,一般是通过直接改变进入除氧器的凝结水流量来控制的。
在以往的除氧器水位的控制组态中,除氧器水位控制系统原理图如左图所示:这是一个单冲量和串级三冲量相结合的控制系统。
以DEA1_PID和DEA2_PID为核心组成串级三冲量控制系统,DEA1_PID是主调器,DEA2_PID是副调器;以DEA3_PID为核心组成单冲量控制系统。
除氧器水位(三选中)是主信号,该信号与运行人员设置的水位定值信号的偏差,分别送到单冲量和串级三冲量主调器的入口,给水流量和凝结水流量是系统的辅助信号:给水流量为除氧器的所有流出量的总和,为省煤器入口给水流量与过热器一、二级喷水流量之和;凝结水流量是除氧器的流入量。
在三冲量模式下,主调器DEA1_PID接受除氧器水位设定值与检测值(三选中)的偏差信号,经比例积分运算后的输出与给水流量的前馈量之和,减去凝结水流量,其偏差值送至副调器DEA2_PID,副调器的输出去控制除氧器入口的凝结水流量调节阀开度,作用于凝结水流量的改变以稳定除氧器水位;在单冲量模式下,DEA3_PID直接根据水位的偏差信号控制凝结水流量以调节除氧器的水位。
三冲量与单冲量模式的切换逻辑是:1、当凝结水流量<200T/H,为单冲量模式;2、当凝结水流量>300T/H,为串级三冲量模式;3、当200T/H<凝结水流量<300T/H,维持当前的控制模式不变二、一般意义的凝汽器热井水位控制方案:与除氧器一样,凝汽器水位也是机组运行必须监控的重要参数之一:凝汽器水位过高,将直接影响凝汽器的真空,严重时将导致汽轮机低压缸进水;凝汽器热井水位过低,也将危及凝结水泵的安全运行和整个热力系统的水循环,因此必须对其进行自动控制,确保机组的安全高效运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16
18
this macro is named "SIGSEL22" occupying 50 BN
除氧器水位控制
20
LOOP PCU MADR CLD# L3
DATE
2 27 3 51
H.SHUMATE P.TRIMBLE
18
除氧器水位信号处理2
CUSTOMER: PLANT: CONTRACTING FIRM: B.C.CO. JOB NO.:
Sheet# 1
2 SIGNAL SELECT LOGIC (1/2)
THIS DRAWING IS THE PROPERTY OF BAILEY CONTROLS COMPANY. NEITHER THE DRAWING, NOR REPRODUCTIONS OF IT, NOR INFORMATION DERIVED FROM IT IS TO BE GIVEN TO OTHERS. NO USE IS TO BE MADE OF IT WHICH IS OR MAY BE INJURIOUS TO BAILEY CONTROLS COMPANY. REV DATE CHANGE ENGR APVD REV DATE CHANGE ENGR APVD
Incr Rate Limit (1/Sec) Decr Rate Limit (1/Sec)
0.0
5 S1 S2 A (37) N 5102 D
S3/S4 should be adjusted according to signal span
16
L3.51.1 L3.51.1
选择除氧器水位 2 除氧器水位1 信号故障
Wednesday, May 13, 2009, 11:10:14
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
2
2
TAGNAME: U1_L3_24_AB TAGDESC: 除氧器水位1信号故障
4 L3.17.1
除氧器水位1
S1 S2 S3 S4
(31) TSTQ 5070
S1
S2 1
(45) DO/L 5078
8
5086
10
S1
A
40
(2) 5073
A
S1 30
(2) 5074
12
S7 1 N Output 0; N+1 Output 0; N+2 Output 1 S8 1 N Output 0; N+1 Output 0; N+2 Output 1 S9 10 N Output 0; N+1 Output 1; N+2 Output 0 S10 100 N Output 1; N+1 Output 0; N+2 Output 0 S11 2222 FB 1 expects 0-1; FB 2 expects 0-1; FB 3 expects 0-1; FB 4 expects 0-1 S12 2222 FB 1 expects 0-1; FB 2 expects 0-1; FB 3 expects 0-1; FB 4 expects 0-1 S13 2222 FB 1 expects 0-1; FB 2 expects 0-1; FB 3 expects 0-1; FB 4 expects 0-1 S14 40 no override; CO:man/oper; FB wait Output Value in Eng Units S2=MSDD BN S15 1 yes (manual mode allowed) S16 2 Feedback Wait Time (Secs) S1 S17 0 Fault Wait Time S18 0 Device Driver Display Type S2 S1 (24) (9) ADAPT 5081 T S19 23 out 2 or 3 S3 5080 S20 13 out 1 or 3 S21 12 out 1 or 2 Output Value in 0 S4 Eng Units Time Const Transf To Inp 1 Adr Of Spec To Be Adapted S2 5083 Blk Pulsed Outputs Length ( 0 = Outputs Latched) S5 0 Time Const Transf To Inp 2 To BeS22 0 S3 14 Spec Adapted S23 1 auto - Initial Mode (0=Manual 1=Auto) S24 0 no trk on start
logic 1 alarm state TAGNAME: U1_L3_24_AD TAGDESC: 除氧器水位信号故障
除氧器水位1 信号故障 L3.51.2
4
S1 S2 6 L3.18.1
TAGNAME: U1_L3_24_AC TAGDESC: 除氧器水位2信号故障
A (37) N 5082 D
S1
0.0
5 S1 S2 A (37) N 5098 D
S3/S4 should be adjusted according to signal span
4
L3.51.1 L3.51.1
选择除氧器水位 1 除氧器水位2 信号故障
S1 NOT (33) 5096
4
6 AVERAGE S1 S2
S3 S4 0.5 0.5
Bailey Controls D HB22703 Company
CUST. ORDER NO.: 24 26 28 FILE: 30
A
ORIGINAL ISSUE T.J.LEOPOLD DWN
S2 1
DO/L
(45) 5087
logic 1 alarm state
除氧器水位信号故障 L3.51.3
除氧器水位2
S1 S2 S3 S4
6
(31) TSTQ 5071
S1
S2 1
(45) DO/L 5079
logic 1 alarm state TAGNAME: U1_L3_24_AA TAGDESC: 除氧器水位信号选择
除氧器水位 K3.39.4
J3.39.4 L3.38.10 L3.51.2 L3.40.1 14
14
S1 S2 S3
S4 S5 0 0
T
(9) 5101
S1 S2
(8) 5105
S3 S4
Gain Param Of Input 1 S4 Gain Param Of Input 1 S5 2
Time Const Transf To30 S3 Inp 1 Time Const Transf To30 S4 Inp 2
S1
S2 S3 S4 S5 S6 S7
AO/L
17 0 3000 3000 0 0.1
(30) 5111 L3.51.4
Eu Id Eu Zero Of Input (S1) Eu Span Of Input (S1) High Alarm Limit Value Low Alarm Limit Value Sig Change (% Of Span)
6
(K) (15) 5091
Gain Param Of Input 1 Gain Param Of Input 2
8 L3.51.2
S1 S2 S1 S2 S3
S4 S5 0 0
(K) (15) 5107
1 1
S1 S2 S3
T
(9) 5109
Time Const Transf To Inp 1 Time Const Transf To Inp 2
3
CUST. ORDER NO.: 24 26
Bailey Controls D HB22703 Company
FILE: 28 30
A
ORIGINAL ISSUE T.J.LEOPOLD DWN
20
APVD ENGR
X
2
4
6
8
10
12
14
16
18
20
22
CADEWS
32
除氧器水位控制
Wednesday, May 13, 2009, 11:10:15
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
L3.17.1 2
除氧器水位1
(-) S1 S2 (+)
S3 S4 -1 1
S1 S2 (K) (15) 5090
Gain Param Of Input 1 Gain Param Of Input 2
(K) (15) 5106
1 1 Gain Param Of Input 1 Gain Param Of Input 2
S3 S4 -1 1
S1 S2 (K) (15) 5094
Gain Param Of Input 1 Gain Param Of Input 2
(K) (15) 5108
1 1
S1 S2 S3
T
(9) 5110
Time Const Transf To Inp 1 Time Const Transf To Inp 2
S3/S4 should be adjusted according to signal span 10
选择除氧器水位平均值 除氧器水位选择站启动脉冲
S1 NOT (33) 5093