EBH360掘进机行走机构设计
悬臂式掘进机履带行走机构的设计
ABS TRA CT:By u s i n g t h e we a t h e r c i r c u l a t i o n s i t ua t i o n a n d v a r i o u s p hy s i c a l ie f l d s’ c h a r a c t e r i s t i c s , t h i s p a pe r a n a l y z e s a
气系统等部分组成 ,掘进机 由截割机构 的电机经过二级行 星减 速机驱动截割头进行截煤作业 ,截割臂 由液压系统 的升降油缸
和 回转油缸控制 ,进给作业 由行走机构的液压马达驱动履带来 实现 , 机器作业 时的支撑 由装 载机构 的铲板 和后 支撑 完成 , 截割
有西南 风急流存 在 ; 三 是从强降水 时段的涡度场 、 散度场 、 垂 直
速度场等物理量场看出 , 我市 西北 部为 辐合 区 , 这些参数 和降水
西部 为一 2 0 x 1 0 h P a / s , 也说 明西部为上升运动。
( 4 ) 从红外云图看出 , 7月 2 1日 8 时 1 5分 , 我市范 围有很强
量大小分布落 区吻合较好。
对于天气预报而言 , 日本降水传真 图和德 国数值 预报 场对
山西科技 文章编号 : 1 0 0 4 — 6 4 2 9 ( 2 0 1 3 ) 0 6 — 0 0 61 — 0 4
岩石掘进机履带行走机构的设计要求
求 的设计参数 和结构型式 : 对不 同功率
掘 进 机 的 行 走 部 进 行 三 维 建 模 设 计 和 理论分析 , 从 而 提 高 掘 进 机 在 不 同工 况 下 掘 进 作 业 时 的稳 定 性 和 适 应 能力 。
其 上 圆滑 、 平 稳 地 转 动
动机驱动型式 ; 履带行走机构有安全 、
基于 O P C通信技术 的空气 压缩机站监控 网络
中 国 矿 业 大 学 和 位 于 济 宁 市 微 山 县 的枣 庄 矿 业 ( 集 团) 公 司 高 庄 煤 矿 通 过 分 析 平 顶 山煤 业 ( 集团) 有 限 责 任 公
进 机行和研究 , 在 提 出履 带 行 走 机 构 在 掘 进 机 中 的各 项 功 能 以后 , 明 确 了行 走 机 构
的工作原 理和设计要求 : 对设计要求进
行探讨之后 , 进 而 选 用 行 走 机 构 不 同要
板 以及液压马达等组成 。 履带行走机构 是依 靠接地 履带 与巷 道底 板 之 间相对
接 串联 式 高 压 变 频 器 , 高 压 交 流 电输 入 输 入 高 压 H 桥 路 ,经 过 H 桥 变 换 之 后
术、 抗 共模 电压技 术 、 直接 速度 控制 技
它 调 速方 法相 比 , I G B T直 接 串 联 变 频
变频 器 以后不 需要 任何 降压 环节整 流 术 ( D S C) 为一体 的“ 高压 ” 变频器 。与其 直接输出 , 电路 简单 、 自损 耗小 、 效 率 调 速 具 有 无 极 调 速 、 容 易 实 现 自动 控 高、 体积 小 、 重量 轻 、 可靠 性高 、 维 护方 制 、 不用 改变原设 备结构和安装量小 的 便 。经过研 究分 析 , 他 们认 为 I G B T直 特 点 。 因此 ,决 定 采 用 第 三 种 方 案 , 即
掘进机行走机构的结构设计

毕业设计任务书学生姓名:任务下达日期:年月日设计开题日期:年月日设计开始日期:年月日中期检查日期:年月日设计完成日期:年月日一、设计题目:掘进机行走机构的结构设计二、设计的主要内容:说明书:1、中英文摘要、中英文目录;2、掘进机行走部方案比较;3、掘进机行走部的总体结构设计4、.减速器的结构设计与计算;5、相关零部件选择及校核。
图纸:1、行走部总装配图A0一张;2、行走部减速器A0一张;3、主要零部件图(手绘图1张)。
四、设计目标:设计参数:机重40000kg,行走速度6.6m/min,行走部接地长度440cm,行走部接地宽度59.5cm.综合运用知识,多种方案比较,确定方案,满足设计参数要求。
指导教师:院(系)主管领导:年月日开题报告摘要掘进机是一种较先进的井下掘进设备。
行走机构由履带、支重轮、托链轮、引导轮、驱动轮、张紧装置、行星齿轮减速器、液压马达和履带架等部分组成。
按照掘进机行走部及行走减速器的工作原理进行初步设计。
在此基础上通过对此题目的分析以及对一些相关书籍和文献的查阅,进一步研究掘进机行走部的设计及行走减速器的设计原理。
设计重点应在于行走部的履带行走机构设计及行走减速器的行星传动设计。
首先阐述行走部的履带行走机构的一般结构,简易的叙述总体方案设计,其次对减速器进行细致的设计,包括行星减速器的选择、计算、校核。
通过研究掘进机行走部及行走减速器的基本原理,获得了大量有关设计掘进机行走部及行走减速器的要领。
关键词:掘进机;行走机构;减速器AbstractBoring machine is a more advanced underground boring equipment. Travel agencies from the track, supporting wheels, asked sprocket, guide wheel, driving wheel, tensioning device, planetary gear reducer, hydraulic motors and track aircraft components.In accordance with the driving and walking to walking part reducer preliminary design works. Based on this analysis and through this topic a number of books and documents on access, further driving to walking part of the design and running gear reducer design principles. Design should focus on running the Department of Design and crawler running gear reducer planetary transmission design. First, the Department set to walk the general structure of crawler, a simple description of the overall program design, followed by a careful design of the reducer, planetary reducer selection, calculation and check.Department of walking through the tunnel boring machine and the basic principles of running reducer to obtain a lot of walking part of the design driving and walking reducer essentials.Key words:Boring machine; Travel agencies; Reducer目录摘要 (IX)Abstract............................................................................................................. I I 第1章绪论. (1)1.1 问题的提出 (1)1.2 国内外发展状况 (1)1.3 悬臂式掘进机行走机构的发展特点 (3)1.4 悬臂式掘进机行走机构的发展趋势 (4)第2章方案论证 (5)2.1 驱动方式的分析 (6)2.1.1 液压驱动 (6)2.1.2 电驱动 (6)2.2 传动方式分析与选择 (6)第3章掘进机总体结构设计 (9)3.1 行走部的工作要求 (9)3.2 掘进机行走部的组成及行走原理 (9)3.2.1 掘进机行走部的组成 (9)3.2.2 掘进机的行走原理 (10)3.3 行走机构的型式选择 (11)3.3.1 行走型式的选择 (11)3.4 行走机构的设计计算 (11)3.4.1 履带节距的计算 (11)3.4.2 履带牵引力的计算 (12)3.5 行走机构各种阻力计算 (13)3.6 驱动轮各主要参数的确定 (14)3.7 行走机构液压马达的选择 (15)3.8 重轮的设计计算 (17)3.9 张紧装置 (18)第4章行走减速器的设计计算 (19)4.1 行走减速器方案的确定 (19)4.1.1 输出轴的转速计算 (19)4.1.2 传动比的分配 (20)4.1.3 圆柱齿轮传动部分的计算 (21)4.2 一级圆柱齿轮传动圆柱齿轮的设计计算 (22)4.2.1 选定齿轮类型、精度等级、材料及齿数 (22)4.2.2 按齿面强度设计 (23)4.2.3 根据弯曲强度设计 (26)4.2.4 几何尺寸计算 (28)4.3 行星齿轮传动的设计计算说明 (29)4.3.1 行星齿轮传动的概述 (29)4.3.2 行星齿轮传动方式的选择 (29)4.3.3 传动比的分配 (30)4.3.4 高速级计算 (31)4.3.5 低速级计算 (34)4.4 轴的设计计算 (38)4.4.1 轴的概述 (38)4.4.2 轴材料的选择 (38)4.4.3 各轴的计算 (39)4.4.4 轴的校核 (41)4.5 轴承的选择 (42)4.5.1 滚动轴承类型的选择 (42)4.5.2 润滑与密封 (43)4.5.3 滚动轴承的校核计算 (44)4.6 键的选用 (45)4.6.1 键的选择 (45)4.6.2 键的校核 (46)结论 (48)致谢 (49)参考文献 (50)CONTENTSAbstract........................................................................... (I)Chapter1 Introduction (1)1.1 Overview and issues raised (1)1.2 Domestic and international development (1)1.3 Roadheader walking characteri stics of the development agencie (3)1.4 Roadheader trend walking mechanism (4)Chapter2 Demonstration (5)2.1 Analysis of driving mode (6)2.1.1 Hydraulic drive (6)2.1.2 Electric drive (6)2.2 Transmission mode and select (6)Chapter3 The overall structural design of tunnel boring machine (9)3.1 The department requirements for the workto walk…………………… .93.2 Composition of the department of boring machine running …………..and walking principle (9)3.2.1 Department of the composition of the boring machine running .93.2.2 Principles to walk TBM (10)3.3 Type Selection travel agencies (11)3.3.1 Choose the type of walking (11)3.4 Design and calculation of travel agencies (11)3.4.1 Calculation of track pitch (11)3.4.2 Calculation of traction track (12)3.5 Calculation of travel organizations of various resistanc........ .. (13)3.6 Determination of main parameters driving wheel………………. .143.7 The choice of running gear hydraulic mo tor (15)3.8 Design and calculation of roller (17)3.9 Tensioning device (18)Chapter4 Design and Calculation of walking speed reducer (19)4.1 Program to determine walking speed reduce r (19)4.1.1 Calculation of the output shaft rotational speed……… ..194.1.3 Calculation of gear transmission part (21)4.2 A cylindrical gear design and calculation (22)4.2.1 The sele allocation of transmission ratiocted gear type, precisiongrade, material and number of teeth (22)4.2.2 Design of according to tooth surface strength (23)4.2.3 According to the design bending strength of (26)4.2.4 Calculation of the geometric dimensions of (28)4.3 Calculation of planetary gear design description (29)4.3.1 Overview planetary gear (29)4.3.2 Planetary gear transmission t o the choice.................... . (29)4.3.3 The allocation of transmission ratio (30)4.3.4 Calculation of high-level (31)4.3.5 Calculation of low-level (34)4.4 Shaft design calcula tion (38)4.4.1 Overview of shaft (38)4.4.2 Shaft material selection ........................................ . (38)4.4.3 The calculation of the shaft (39)4.4.4 Check of shaft (41)4.5 Bearing selection (42)4.5.1 Bearing type selection ....................................... .. (42)4.5.2 Lubrication engineering....................................... .. (43)4.5.3 Check calculation of beari ng................................ (44)4.6 Selection of key (45)4.6.1 Key selection (45)4.6.2 Checking key (46)Conclusion (48)Thanks (49)References (50)第1章绪论1.1 问题的提出掘进机采用履带行走机构,它支撑机器的自重和牵引转载机行走,当掘进作业时,它承受切割机构的反力、倾覆力矩和动载荷。
悬臂式半煤岩掘进机行走机构设计说明书
1 绪论悬臂式掘进机作业线主要由主机与后配套设备组成。
主机把岩石切割破落下来,转运机构把破碎的岩渣转运至机器尾部卸下,由后配套转载机、运输机或梭车运走。
悬臂式掘进机的切割臂可以上下、左右自由摆动,能切割任意形状的巷道断面,切割出的表面精确、平整,便于支护。
履带式行走机构使机器调动灵活,便于转弯、爬坡,对复杂地质条件适应性强。
悬臂式巷道掘进机具有掘进速度快,巷道成形好,便于与其它设备配套组成综掘作业线以及成本较为合理等优点, 因而应用广泛。
近年来掘进机不仅广泛用于煤及软岩道的掘进,在中等硬度的半煤岩巷道掘进中也获得良好的技术经济效果。
国外的某些重型掘进机已能切割抗压强度达170MPa 的硬岩。
据统计,目前国外各主要产煤国采用掘进机掘进的巷道占采准巷道的40%以上。
而我国综掘比率为8%左右,与国外先进水平相比尚存在很大差距, 与我国煤炭生产的需要, 特别是现代化高产高效矿井建设的需要也是极不相适应的, 因此, 我国掘进机的研制开发以及推广应用, 还需作大量工作。
1.1国外掘进设备及综掘技术发展现状-1.1.1 切割能力稳定提高掘进机经历了切割软煤、硬煤及半煤岩的过程。
近期一些重型掘进机已能切割硬岩。
目前国外矿山应用的各种型号的悬臂式掘进机约4 000余台。
一般来说,这类悬臂式掘进机的重量为20~160t,最大切割功率已达408kW,切割岩石的抗压强度最高可达170MPa。
据报道, 日本成功地使用TM 60K 型掘进机掘进全岩巷引水隧道, 岩石硬度高达170~200M Pa。
目前最大的WAV 408 型掘进机重达160 t, 切割功率可达408 kW , 定位切割断面可达m。
87.521.1.2 机器的可靠性高先进的制造技术为基础, 从原材料质量到零部件的加工精度都能严格控制, 又有优越的国际协作条件, 选购外购外协件的范围宽广, 有效地保证了主机的质量水平。
此外, 近年来广泛地采用了可靠性技术, 其突出表现为简化机械结构、采用降额设计。
掘进机行走机构的液压系统设计
掘进机行走机构的液压系统设计
简介
本文档旨在介绍掘进机行走机构的液压系统设计。
液压系统在
掘进机的行走过程中扮演着重要的角色,确保机器的稳定运行和高
效工作。
液压系统的组成
掘进机的液压系统主要由液压泵、液压马达、液压缸等组件组成。
其中液压泵负责将液压油压力加大,液压马达将液压能量转化
为机械能,液压缸则用于对行走机构进行动力驱动。
液压系统的设计
在设计掘进机行走机构的液压系统时,需要考虑以下几个方面:
1. 负载需求:根据掘进机的行走负载需求,选择合适的液压泵
和液压马达。
考虑负载的大小、速度和频率等因素,确保液压系统
可以提供足够的动力。
2. 系统的可靠性:液压系统的可靠性对于掘进机的安全运行至
关重要。
在设计过程中,应选择优质的液压元件,并确保系统的密
封性能良好。
3. 能效优化:掘进机行走过程中的能耗是一个重要的考虑因素。
在设计液压系统时,可以采用变量泵供油系统,通过根据负载需求
调整流量,来提高整体能效。
4. 系统保护:为了保护液压系统,防止因过载或其他异常情况
而损坏,可以添加液压阀、传感器以及报警装置等。
确保在出现异
常情况时可以及时采取相应措施。
结论
掘进机行走机构的液压系统设计是确保掘进机稳定运行和高效
工作的关键。
在设计过程中,需要考虑负载需求、系统可靠性、能
效优化以及系统保护等因素。
通过合理设计和选择优质的液压元件,可以满足掘进机行走机构的液压系统需求。
掘进机行走机构设计

摘要掘进机是一种较先进的井下掘进设备。
行走机构由履带、支重轮、托链轮、引导轮、驱动轮、张紧装置、行星齿轮减速器、液压马达和履带架等部分组成。
按照掘进机行走部及行走减速器的工作原理进行初步设计。
在此基础上通过对此题目的分析以及对一些相关书籍和文献的查阅,进一步研究掘进机行走部的设计及行走减速器的设计原理。
设计重点应在于行走部的履带行走机构设计及行走减速器的行星传动设计。
首先阐述行走部的履带行走机构的一般结构,简易的叙述总体方案设计,其次对减速器进行细致的设计,包括行星减速器的选择、计算、校核。
通过研究掘进机行走部及行走减速器的基本原理,获得了大量有关设计掘进机行走部及行走减速器的要领。
关键词:掘进机;行走机构;减速器AbstractBoring machine is a more advanced underground boring equipment. Travel agencies from the track, supporting wheels, asked sprocket, guide wheel, driving wheel, tensioning device, planetary gear reducer, hydraulic motors and track aircraft components.In accordance with the driving and walking to walking part reducer preliminary design works. Based on this analysis and through this topic a number of books and documents on access, further driving to walking part of the design and running gear reducer design principles. Design should focus on running the Department of Design and crawler running gear reducer planetary transmission design. First, the Department set to walk the general structure of crawler, a simple description of the overall program design, followed by a careful design of the reducer, planetary reducer selection, calculation and check.Department of walking through the tunnel boring machine and the basic principles of running reducer to obtain a lot of walking part of the design driving and walking reducer essentials.Key words:Boring machine; Travel agencies; Reducer目录摘要 (I)Abstract............................................................................................................. I I 第1章绪论. (1)1.1 问题的提出 (1)1.2 国内外发展状况 (1)1.3 悬臂式掘进机行走机构的发展特点 (3)1.4 悬臂式掘进机行走机构的发展趋势 (4)第2章方案论证 (5)2.1 驱动方式的分析 (6)2.1.1 液压驱动 (6)2.1.2 电驱动 (6)2.2 传动方式分析与选择 (6)第3章掘进机总体结构设计 (9)3.1 行走部的工作要求 (9)3.2 掘进机行走部的组成及行走原理 (9)3.2.1 掘进机行走部的组成 (9)3.2.2 掘进机的行走原理 (10)3.3 行走机构的型式选择 (11)3.3.1 行走型式的选择 (11)3.4 行走机构的设计计算 (11)3.4.1 履带节距的计算 (11)3.4.2 履带牵引力的计算 (12)3.5 行走机构各种阻力计算 (13)3.6 驱动轮各主要参数的确定 (14)3.7 行走机构液压马达的选择 (15)3.8 重轮的设计计算 (17)3.9 张紧装置 (18)第4章行走减速器的设计计算 (19)4.1 行走减速器方案的确定 (19)4.1.1 输出轴的转速计算 (19)4.1.2 传动比的分配 (20)4.1.3 圆柱齿轮传动部分的计算 (21)4.2 一级圆柱齿轮传动圆柱齿轮的设计计算 (22)4.2.1 选定齿轮类型、精度等级、材料及齿数 (22)4.2.2 按齿面强度设计 (23)4.2.3 根据弯曲强度设计 (26)4.2.4 几何尺寸计算 (28)4.3 行星齿轮传动的设计计算说明 (29)4.3.1 行星齿轮传动的概述 (29)4.3.2 行星齿轮传动方式的选择 (29)4.3.3 传动比的分配 (30)4.3.4 高速级计算 (31)4.3.5 低速级计算 (34)4.4 轴的设计计算 (38)4.4.1 轴的概述 (38)4.4.2 轴材料的选择 (38)4.4.3 各轴的计算 (39)4.4.4 轴的校核 (41)4.5 轴承的选择 (42)4.5.1 滚动轴承类型的选择 (42)4.5.2 润滑与密封 (43)4.5.3 滚动轴承的校核计算 (44)4.6 键的选用 (45)4.6.1 键的选择 (45)4.6.2 键的校核 (46)结论 (48)致谢 (49)参考文献 (50)CONTENTSAbstract........................................................................... (I)Chapter1 Introduction (1)1.1 Overview and iss ues raised (1)1.2 Domestic and internati onal development (1)1.3 Roadheader walking characteristics of the development agencie (3)1.4 Roadheader trend walk ing mechanism (4)Chapter2 Demonstration (5)2.1 Analysis of driving mod e (6)2.1.1 Hydrauli c drive (6)2.1.2 Electric d rive (6)2.2 Transmission mode a nd select (6)Chapter3 The overall structural design of tunnel boring machine (9)3.1 The department requirements for the workto walk…………………… .93.2 Composition of the department of boring machi ne running …………..and walking princ iple (9)3.2.1 Department of the composition of the boring machine running .93.2.2 Principles to walk TBM (10)3.3 Type Selection trave l agencies (11)3.3.1 Choose the type of walking (11)3.4 Design and calculation of travel agencies (11)3.4.1 Calculation of tra ck pitch (11)3.4.2 Calculation of tract ion track (12)3.5 Calculation of travel organizations of various resistanc........ .. (13)3.6 Determination of main parame ters driving wheel………………. .143.7 The choice of running gear hydraulic motor (15)3.8 Design and calculation of roller (17)3.9 Tensioning d evice (18)Chapter4 Design and Calculation of walking speed reducer (19)4.1 Program to determine walkin g speed reducer (19)4.1.1 Calculation of the output shaf t rotational speed (19)4.1.3 Calculation of gear tra nsmission part (21)4.2 A cylindrical gear design and calculation (22)4.2.1 The sele allocation of transmission ratiocted gear type, precisiongrade, m aterial and number of teeth (22)4.2.2 Design of according to toot h surface strength (23)4.2.3 According to the design be nding strength of (26)4.2.4 Calculation of the geometri c dimensions of (28)4.3 Calculation of planetary gear d esign description (29)4.3.1 Overview plane tary gear (29)4.3.2 Planetary gear tra nsmission to the choice.................... . (29)4.3.3 The allocation of tra nsmission ratio (30)4.3.4 Calculation of high-level (31)4.3.5 Calculation of low-le vel (34)4.4 Shaft design calcul ation (38)4.4.1 Overview of shaft (38)4.4.2 Shaft material s election ........................................ . (38)4.4.3 The calculation o f the shaft (39)4.4.4 Check of shaft (41)4.5 Bearing selection (42)4.5.1 Bearing type select ion ....................................... .. (42)4.5.2 Lubrication engineeri ng....................................... .. (43)4.5.3 Check calculation of bea ring................................ (44)4.6 Selection o f key (45)4.6.1 Key selection (45)4.6.2 Checking key (46)Conclusion (48)Thanks (49)References (50)第1章绪论1.1 问题的提出掘进机采用履带行走机构,它支撑机器的自重和牵引转载机行走,当掘进作业时,它承受切割机构的反力、倾覆力矩和动载荷。
EBH360掘进机装运机构设计
EBH360掘进机装运机构的设计摘要:装运机构是掘进机主要的构成结构之一,其性能直接影响着整机的生产能力。
自从掘进机达到截割功率200kw以上之后,更快的截割效率对掘进机的装运机构的工作能力也提出了新的要求。
ebh360的装运机构分为铲板部和第一运输机两部分。
铲板部采用镜面双向大倾角,马达直接驱动六齿星轮。
第一运输机为平直机构,与铲板构成共同滑移,采用边双链结构、电机驱动和油缸张紧加卡板的形式。
关键词:掘进机装运机构铲板第一运输机驱动形式中图分类号:s611 文献标识码:a 文章编号:概述1)目前比较常见的铲板部的形式分为耙爪式和星轮式。
耙爪式是利用一对交替动作的耙爪来不断地耙取物料并装入转载运输机构。
这种方式结构简单、工作可靠、外形尺寸小,在ebz132及其以前应用很普遍。
但这种装载机构宽度受限制;星轮式机构比耙爪式简单、强度高、工作可靠,但装大块物料的能力较差,遇到大块物料需要合理处理后方能装载。
由于ebh360为超重型部分端面掘进机,机型机构较大,铲板选为3600mm宽度,所以铲板部选为星轮结构。
驱动采用电机驱动也可用液压马达驱动。
但考虑工作环境潮湿、有泥水,选用液压马达驱动。
2)第一运输机采用边双链式输送机构。
驱动可采用液压马达驱动和电机驱动两种形式。
ebh360采用电机驱动的形式,具有良好的瞬间过载能力,可克服较小的物料卡链现象。
电机驱动可将电动机和减速器布置在刮板输送机靠近机身一侧,在驱动装载机构同时,间接地以输送机构机尾为主动轴带动刮板输送机构工作。
这样传动系统中元件少、机构比较简单,但铲板与第一运输机二者运动相牵连,相互影响大。
由于该位置空间较小布置较困难。
所以将电动机布置在机器的尾部的一侧,通过联轴器连接到安装在运输机另一侧的减速器,由减速器的输出端连接到驱动链轮的形式,但由于传动装置和动力元件较多,故障点有所增加。
铲板机构的参数确定:装载机构的生产能力应大于截割机构的生产能力,这是确定装载机构技术参数的先决条件。
基于ANSYS的EBH-360型掘进机回转台的拓扑优化设计
基于ANSYS的EBH-360型掘进机回转台的拓扑优化设计作者:关满杰马星楠张凯程佳来源:《科技视界》 2013年第18期关满杰1马星楠2张凯2程佳3(1.中国人民解放军65667部队 77分队,辽宁阜新 123000;2.北方重工集团有限公司煤矿机械分公司,辽宁沈阳 110141;3.北方重工设计研究院,辽宁沈阳 110141)【摘要】本文运用有限元分析软件ANSYS建立EBH-360型掘进机回转台的实体模型,并对极限载荷作用下的回转台进行有限元应力分析,根据计算结果校核了回转台的静强度。
使用ANSYS中的拓扑优化模块对回转台进行拓扑优化,优化结果为体积减少12%,变形量减少45%,从而为后续回转台改进结构、节省材料、降低成本提供有力的参考依据。
【关键词】回转台;有限元应力分析;拓扑优化0 引言回转台是EBH-360型掘进机的重要部件,它连接机架,支撑截割臂,实现截割头的钻进掏槽、扫落煤岩、截割臂的升降、回转等各项运动,并承受来自截割头的复杂多变的冲击载荷[1]。
回转台的合理结构决定掘进机的工作性能及整机的稳定性,其结构强度、刚度不足将造成截割性能的降低和疲劳断裂。
在传统的设计中,回转台的设计主要靠设计经验和经验公式来进行,为了增大回转台的强度,安全系数的选择往往偏大,造成制造材料的浪费,因此很有必要对回转台进行优化设计,为生产厂家降低制造成本、提高利润[2]。
优化设计的方法很多种,如目标优化、拓扑优化等,本文采用拓扑优化的方法对回转台进行优化设计。
1回转台三维模型建立及有限元静力分析本文直接在ANSYS中建立回转台的三维模型,为有利于有限元分析,对其进行合理简化,将不必要的小孔、凸台、沉孔、倒圆角等都去掉。
选择单元类型为Solid45单元,采用自由划分,设置单元尺寸长度为40 mm并对易发生应力集中的部位进行细化,划分网格[3]。
本掘进机回转台为铸造件,材料为铸钢ZG35CrMo,调质处理后其屈服强度σs≥510MPa,选用安全系数n=1.5,计算可得许用安全应力[σ]:[σ]=σs/n=510/1.5=340 MPa(1)只有保证回转台在极限工况下的最大应力值均小于安全应力,才能进行安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
、 譬 i
;
、
。
。 。 l
.
京 ≮譬
ห้องสมุดไป่ตู้
~
“。 。 _ 、
0
、 ‘
…
; _ 、 ’
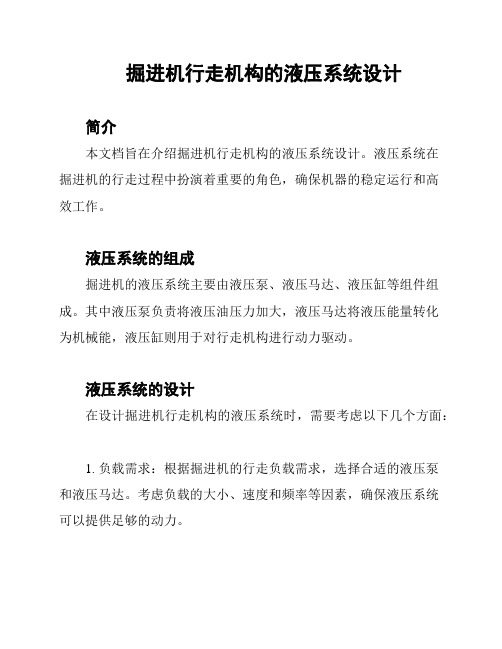
图2 行 走机 构 结构 示意 图
一
图1 履 带板 结构 图
子 式 。小 型 掘 进 机 行 走 机构 上还 能看 到 带 链松 紧程 度 ,只有 履带 链 的松 紧程 度 滚子式,但这种履带板结构形式复杂, 合 适 才 能达 到最 佳 状 态 。一 般 要 求 履 带 维修拆卸不便 ,无法满足重型掘进机强 链 在 行 走机 构 支 起 情 况 下 ,下 垂 量 调 节 度 。所 以选 用 整 体 式 履 带 板 ,结 构 上 既 应 在 5 0 7 0 a r m间 ,如 调 节过 松 易 导致 脱 保 证 使 用 强 度 满 足要 求 ,又 要控 制履 带 链或者跑偏,无法正常行走。过紧会使 板 重 量 不 能 过 大 ,降 低 能 耗 。履 带 板 宽 走 阻力增 加 ,行走 噪音加 大 , 导 致异 常 。 度 设 计 上 要考 虑 整 机 接 地 比压及 与接 地 张 紧油 缸选 用 一般 有 黄油 缸 和液 压油 缸 。 长 度 间 配 合 关 系。 平 均 接地 比压 计 算 公 黄 油 缸 是用 油 枪 向油 缸 中注 入 润 滑 脂 , 式如 下 : 推 动 缸 杆进 使 张 紧轮 来 调 整 履 带松 紧 。 黄 油 缸 是通 过 黄 油 保 持 压 力 ,使 用 中易 P : 旦 x l 0 2 6 己 泄露 失压 ,导致 张 紧失效 。E B H 3 6 0掘进 E B Z 3 6 0掘进 机履 带 板设 计 宽度 b 为 机 行 走 张 紧采 用 的是 单 作 用 液 压 油 缸 , 7 5 0 m m, 接 地 长 度 L为 4 6 4 0 m m,整 机 压 力 油 推动 油 缸 来 张 紧 履 带 ,用 起 来 方 重 量 G为 1 2 5 0 k N,由此算 出接地 比压为 便 快 捷 。张 紧后 将 卡 板 插 入 张 紧 腔 ,实 0 . 1 7 9 M P a 。一 般 在 小 型 掘 进 机 设 计 上 要 现机械锁定 ,可保证 不会 因为失压导致 使接 地 比压 小于 0 . 1 4 MP a ,虽然 重 型掘进 张 紧 失 效 。 同时 履 带 架设 计 上 给张 紧腔 机 很 难 达 到这 一 数 值 ,但 在设 计 时也 要 和 油 缸 腔 留 出安 装 口,方 便拆 卸 维 修 。 尽 量 减 小 接 地 比压 。 图 1 为E B H 3 6 0 履 实 际 使 用 中 ,行 走 机 构在 运行 一 段 时 间 带板 结构 图。 后要 调整 松 紧程度 , 因为磨 合一 段时 间 , 2 - 3 履 带链 支撑 形式 履带 链 间隙会 加大 ,维 护时要 注 意 。 掘进机普遍使用支撑方式有摩擦板 结语 通 过 对 各 关 键 部 位 研 究 , 最 终 确 式 和 支 重 轮 式 。摩 擦 板 式 结 构 简 单 ,加 B H 3 6 0 工 制 造 容 易 。工 作 原 理 是 履 带链 与摩 擦 定 行 走 机 构 设 计 结 构 ,完 成 对 E 板 表 面 接 触 ,通 过 滑 动 摩擦 实 现整 机 动 掘 进 机 行 走 的 绘 制 , 如 图 2所 示 。 作 ,因此 在 摩 擦 板 表 面 都 焊 有 高 耐磨 性 掘进机的行走机 构是进行作业 的根本, 材料。这种结构缺点是能耗大 ,对履带 因此要重视对行走机构的研究和设计。 链 张 紧 要 求 也 比采 用 支 重 轮 结 构 高 。支 本文通过分 析 E B H 3 6 0掘 进 机 行 走 重 轮 式 结 构 与 履 带链 问是 滚 动 摩 擦 ,传 机构设计 ,阐述 了各部位在设 计中需 注 动效 率 高 、 能耗低 , 对 恶劣 工况 适应 性强 。 意 问题 ,捋 顺 了设 计 思 路 。 由 于井 下 作 缺点是在支重轮内部采用滑动轴承形式 , 业环境恶劣 ,所 以结构设计和元件选用 遇 到 不 平 整 地 面 时各 支重 轮 受 力 不 同 , 上 ,都 应以安全 可靠 为出发点 ,以使其 易 损 坏 ,设 计 时规 定 单 个 支 重 轮 承 载 能 能 经受 各种 工况 考验 。 力应不小于掘进机总重 5 0 %,表 面 要 进 参考 文献 行 淬 火处 理 提高 强 度 。E B Z 3 6 0掘进 机履 [ 1 】 杨春海 . 掘进 机 履 带 式行 走 机 构 的研 带 链 支 撑 从 降 低 能 耗 和松 紧 度 调 整 角 度 究 m. 科 学之友 ,2 0 0 8( 0 3):1 - 2 . 考 虑 ,采用 支重 轮式 结构 。 [ 2 ] 韩健 ,王书 蒙,胡王景 . S 1 0 0 掘 进机 2 . 4张 紧形式 的使 用与技 术 Ⅱ 1 . 煤矿 机械 , 2 0 0 7 , 2 8 ( 1 2) . 张 紧 机 构 原 理 是通 过 张 紧油 缸 推 动 张紧轮 ,通过张紧轮前后移动来调整履
2 0 1 4 NO. O 1(下
可
丽
工 业 技 术
E B H3 6 0 掘进机行走机构设计
廉 浩
( 北方重工集团有 限公 司 ,辽 宁 沈 阳 1 1 0 1 4 1 )
摘 要 :本 文介 绍 了 E B H3 6 0掘进 机行 走机 构 的设计 方案 ,分 析 了结构 形式 ,明确 了进 一 步研 究的方 向 ,为 以后 的设 计提
供参考。 关 键词 :掘 进机 ;行 走机 构 ;设计 中图分 类 号 :T D 4 2
1 结构 组成
文献标 识 码 :A
啦如 站 》 畔 、 0
行 走 机 构 分 为 左 右 布 置在 掘进 机 的 两 侧 ,结 构 包 括 驱 动 装 置 、驱 动链 轮 、 行 走 架 等部 分 ,行 走 架 通 过螺 栓 与 本 体 连接 。 掘 进机 普遍 采用 履带 式行 走机 构 。 起 支 撑 整 机 重量 、驱 动 行 走 、截 割 操 作 等作 用 。掘 进 作 业 时 ,行 走 机 构 承 受 切 割 机 构 工作 动 载 荷 、作 用 反 力 、及 倾 覆 力 矩 。行 走 机 构 设 计 对 整 机 运 动 、工 作 稳 定性 等性 能有很大影响。行走机构各 部 位 结 构形 式不 是 唯 一 的 ,设 计 过 程 中 要 从整机重量、工作环境、设计空 间等 方 面考虑 。 2各部 分形 式 的确定 2 . 1 驱 动形 式 行 走机 构 驱 动 装 置 一 般 有 电机 驱动 和 液 压 马 达 驱动 两 种 。电 机驱 动方 式 优 点 是 抗 过 载 能 力 强 ,但 因为 E B H 3 6 0 掘 进机 是重 型掘 进机 产 品 ,整机 重量 达 1 2 5 吨, 行走 机构 需 要提 供很 大行走 牵 引力 , 所 用 电 机 尺 寸很 大 ,给 整 机 布 置造 成 麻 烦 。 同 时掘 进 机 在 井 下 作 业 ,对 电机 有 隔爆 和本 安要 求 。 选 用 液 压 马 达驱 动 ,可 以 做 到 与行 走 减 速 机 高 度 集 成 、结 构 紧凑 ,为其 它 机 构 设 计 争 取 空 间 ,且 掘 进 机 自带 液压 系 统 可 提 供 液 压 油 源 ,使 用 方 便 ,在设 计 时一 般用 马达 驱 动方 式 。E B Z 3 6 0掘进 机 在 设 计 中 用 知名 品牌 力 士 乐 的行 走 马 达和减速机 ,其减速机内置一体 式多片 制 动 器 ,停 车 时 自动 锁 紧 ,保 证在 坡 面 工作安全性 ,能适应巷道作业。行走减 速机通过高强螺栓与链轮连接 ,在 液压 马达带动下 , 减速机旋转带动链轮转动 , 链 轮 啮 合 履 带 板 ,使 整 个 行 走 机构 执行 各项 动作 。 2 . 2 履 带形 式 履 带 板 在结 构选 择 上 有 整 体 式 和滚