平尺刻线机运动设计方案
圆盘刻线机机械原理课程设计说明书
河北工业大学机械原理课程设计设计说明书作者:刘昭学号:140566学院:机械工程学院班级:机电142 题目:圆盘刻线机同组人:赵洪飞指导教师:张换高2016年 6 月 25 日摘要目录目录 (1)1设计任务 (2)2国内外研究现状 (2)3执行装置方案设计 (2)3.1功能分析 (3)3.2总功能实现的原理 (3)3.3执行构件工艺动作设计分解 (4)3.4机构型综合 (5)3.5工作循环图设计 (7)3.6执行机构尺度综合 (7)4原动机选择 (8)4.1原动机类型选择 (8)4.2原动机功率和转速确定 (8)5传动系统设计 (8)5.1总传动比计算 (9)5.2传动比分配与传动装置设计(各传动传动比) (9)6总体设计方案 (10)6.1总体布局方案 (10)6.2总体设计方案 (11)7机构运动分析 (12)8结论 (13)参考文献 (14)设计感言 (14)1设计任务1.圆盘刻线机主要用来实现自动刻线,刻线要求为每隔1秒刻一条线,平尺上相邻两条刻线之间的圆弧所对应的中心角度为一度,刻线长度有18毫米、13毫米、10毫米三种类型。
第一次刻线长度为18毫米,后四次刻线长度为10毫米,第六次刻线长度为13毫米,第七至第十次刻线长度为10毫米,以后依此类推,圆盘毛坯的直径为300mm,相邻两条刻线之间圆弧所对应的中心角为一度。
2.刻线深度为0.5mm,深度要均匀,为防止刀具磨损,要求反行程要有抬刀运动。
3.为扩大刻线机的应用范围,要求线条长度可调(中,短长三种长度的比例可不变)。
4. 每秒钟刻一条线。
5:要求刻线机在工作过程中主动轴的角速度不均匀系数δ<=1/40。
刻线时的切削力F=1000N。
2国内外研究现状刻线机国内研究现状:科学技术的发展,有的刻线机上采用了激光刻线机由光刻代替机械刻划,可在工作台移动的情况下完成动态刻线,刻线精度大为提高,国内比较成熟的激光刻线机厂家例如北京博奥嘉华激光科技有限公司生产的BVD50系列激光刻线机。
(完整word版)四工位专用机床运动方案设计

一、设计题目: (2)二、设计条件和要求: (2)1、设计介绍: (2)2、方案设计与选择 (2)3、设计任务与内容 (3)三、原始参考数据 (3)四、机械运动设计方案的拟定 (4)1、圆柱凸轮运动方案 (4)2、齿轮——凸轮运动方案 (5)3、凸轮——连杆运动方案 (6)4、执行机构的选型 (6)5、机械运动方案选择 (8)五、机构的组合方式 (8)六、机械运动循环图 (9)1、运动分析 (9)七、机械运动简图 (9)八、主要零部件尺寸的计算 (10)1、槽轮机构: (10)2、圆柱凸轮的尺寸设计: (11)3、减速器的传动计算: (12)九、课设心得 (13)十、参考文献 (14)一、设计题目:四工位专用机床运动方案设计二、设计条件和要求:1、设计介绍:四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
它的执行机构有两个:一是装有四工位工件的回转工作台,二是装有由专用电机带动的三把专用刀具的主轴箱。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
当主轴箱右移(退回)到刀具离开工件后,工作台回转90,然后主轴箱再次左移。
很明显,对某一个工件来说要在四次循环后完成装、钻、扩、铰、卸等工序。
但对专户门机床来说,一个循环就有一个工件完成上述全部工序。
图一:四工位专用机床图2、方案设计与选择1)回转台的间歇转动,可采用槽轮机构、不完全齿轮机构、凸轮式间歇运动机构。
2)主轴箱的往复移动,可采用圆柱凸轮机构、移动从动件盘形凸轮机构、凸轮-连杆机构、平面连杆机构等。
3)由生产率可求出一个运动循环所需时间T=48s,刀具匀速送进60mm所需时间t匀=30s,刀具其余移动(包括快速送进60mm,快速返回120mm)共需18s。
回转工作台静止时间为40s,因此足够工件装卸所需时间。
回转工作台作单向间歇运动,每次转过90度。
主轴箱作复移动,在工作行程中有快进和慢进两段,回程具有急回特性。
简易数控刻尺机
课程设计说明书设计题目:简易数控刻尺机控制系统设计学生姓名:学号:班级:专业:指导教师:目录第1章设计任务 (2)1.1设计任务介绍及意义 (4)1.2设计任务明细 (4)1.2.1方案设计 (4)1.2.2总体设计 (4)第2章设计总体方案 (6)2.1设计的基本依据 (6)2.2总体方案的确定 (6)第3章电气原理设计 (7)3.1电气系统的基本组成 (7)3.1.1 8051单片机 (7)3.1.2 Intel6264芯片 (8)3.1.3 2764芯片 (9)3.1.4 8155 (9)3.1.5 74ls573介绍 (11)3.1.6 SMC2004A LCM (12)3.1.7 BS232光电耦合器 (13)3.1.8 步进电动机 (13)3.2电气系统的设计 (14)第4章程序设计 (16)4.1软件完成的主要内容 (16)4.2程序设计技术 (24)4.3程序设计说明 (25)参考文献 (26)第一章1.1 设计任务介绍及意义本次设计任务进行简易的数控刻线机床控制系统设计,该刻线机能够对不同的铁尺进行刻线加工1.2 设计任务明细1.2.1方案设计根据课程设计任务的要求,在搜集、归纳、分析资料的基础上,明确系统的主要功能,确定实现系统主要功能的原理方案,并对各种方案进行分析和评价,进行方案选优。
1.2.2总体设计针对具体的原理方案,通过对动力和总体参数的选择和计算,进行总体设计,最后给出系统的总电气原理图(A1一张)。
根据系统的组成可以设计系统的结构图或者进行复杂的电气系统设计,画出另外一张A1图纸。
课程设计的成果最后集中表现在课程设计说明书和所绘制的设计图纸上,每个学生应独立完成课程设计说明书一份,字数为10000字以上,设计图纸不少于两张A1。
用计算机绘图或手工绘图,打印说明书。
课程设计共4周,各阶段的任务和时间安排建议如下:(一)课程实习,搜集资料及方案设计(5天)1、课程实习实习期间,要根据毕业设计任务书的要求,搜集、阅读有关的文字资料和结构图片资料,依据设计要求进一步分析和归纳资料,为课程设计做好准备。
平尺刻线机运动设计方案.doc

平尺刻线机运动设计方案一、工作原理及工艺动作过程在很多具有定量要求的相对移动和相对转动的零件上,需要有指示相对移动或转动量的刻度线。
平尺刻线机主要用于有相对移动零件的刻线工作。
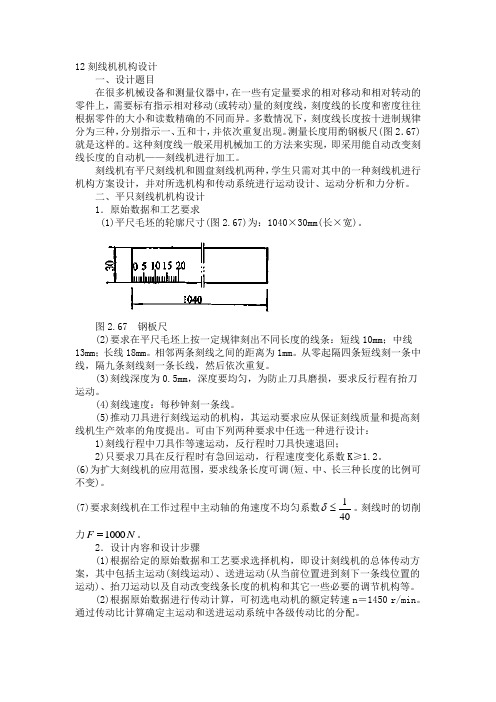
刻度线长度按十进制规律分为三种,分别指示图1 钢板尺一、五和十,并依次重复出现。
图 1 所示的钢板尺就是用平尺刻线机加工的。
显然在加工时,平尺每送进 1 mm,刻刀刻线一次,且能自动改变刻线长度。
因此,平尺刻线机主体工作机构是刻线机构(主运动)和平尺送进机构(辅助运动)。
二、原始数据及设计要求(1)平尺毛坯的轮廓尺寸 ( 图 1) 为: 1040×30mm(长×宽 ) 。
(2)要求在平尺毛坯上按一定规律刻出不同长度的线条:短线10mm;中线 13mm;长线 18mm。
相邻两条刻线之间的距离为1mm。
从零起隔四条短线刻一条中线,隔九条刻线刻一条长线,然后依次重复。
(3)刻线深度为 0.5mm,深度要均匀,为防止刀具磨损,要求反行程有抬刀运动 .(4)行程速度变化系数 K≥1.2 。
(5)刻线机构为了保证刻线质量,应尽可能使刻刀在刻线行程内匀速运动。
抬刀机构必须与刻线机构运动协调,即在刻线完成点抬刀,在刻线起始点落刀。
为保证落刀时刀尖不碰到平尺坯上,刻刀在刻入尺坯前应有一定距离的空程,在设计时主运动的行程应考虑这段距离(可取为 3~4mm)。
(6)自动改变行程长度的附加机构必须与进给运动联系起来,即每进给四次,第五次行程由短程变为中程,再进给四次短程,第五次时变为长程,完成一次循环。
显然在进给机构和行程控制机构之间,需要一个计数机构来实现循环的控制。
这一计数机构要求简单实用,灵活可靠,且必须是一种纯机械式的设计方案。
三运动分析1.运动要求:实现“抬刀—刻线-抬刀-刻线”的运动。
2.功能分析:刻线机主要由抬刀机构、刻线机构以及进给机构三部分组成。
抬刀机构用于刻线时将刀具压下;刻线机构用于刻线,刻线机构要有急回特性。
刻线机机构设计
12刻线机机构设计一、设计题目在很多机械设备和测量仪器中,在一些有定量要求的相对移动和相对转动的零件上,需要标有指示相对移动(或转动)量的刻度线,刻度线的长度和密度往往根据零件的大小和读数精确的不同而异。
多数情况下,刻度线长度按十进制规律分为三种,分别指示一、五和十,并依次重复出现。
测量长度用酌钢板尺(图2.67)就是这样的。
这种刻度线一般采用机械加工的方法来实现,即采用能自动改变刻线长度的自动机——刻线机进行加工。
刻线机有平尺刻线机和圆盘刻线机两种,学生只需对其中的一种刻线机进行机构方案设计,并对所选机构和传动系统进行运动设计、运动分析和力分析。
二、平只刻线机机构设计1.原始数据和工艺要求(1)平尺毛坯的轮廓尺寸(图2.67)为:1040×30mm(长×宽)。
图2.67 钢板尺(2)要求在平尺毛坯上按一定规律刻出不同长度的线条:短线10mm ;中线13mm ;长线18mm 。
相邻两条刻线之间的距离为1mm 。
从零起隔四条短线刻一条中线,隔九条刻线刻一条长线,然后依次重复。
(3)刻线深度为0.5mm ,深度要均匀,为防止刀具磨损,要求反行程有抬刀运动。
(4)刻线速度:每秒钟刻一条线。
(5)推动刀具进行刻线运动的机构,其运动要求应从保证刻线质量和提高刻线机生产效率的角度提出。
可由下列两种要求中任选一种进行设计:1)刻线行程中刀具作等速运动,反行程时刀具快速退回;2)只要求刀具在反行程时有急回运动,行程速度变化系数K ≥1.2。
(6)为扩大刻线机的应用范围,要求线条长度可调(短、中、长三种长度的比例可不变)。
(7)要求刻线机在工作过程中主动轴的角速度不均匀系数401≤δ。
刻线时的切削力N F 1000=。
2.设计内容和设计步骤(1)根据给定的原始数据和工艺要求选择机构,即设计刻线机的总体传动方案,其中包括主运动(刻线运动)、送进运动(从当前位置进到刻下一条线位置的运动)、抬刀运动以及自动改变线条长度的机构和其它一些必要的调节机构等。
刻线机课程设计
刻线机课程设计一、课程目标知识目标:1. 学生能够理解刻线机的基本结构、工作原理及其在工程中的应用。
2. 学生能够掌握刻线机的操作步骤、使用规范及日常维护方法。
3. 学生能够了解与刻线机相关的安全技术,确保操作安全。
技能目标:1. 学生能够独立操作刻线机,完成直线、曲线等基本线条的刻画。
2. 学生能够根据实际需求调整刻线机的参数,保证刻画质量。
3. 学生能够解决刻线过程中遇到的一般性问题,具备一定的故障排除能力。
情感态度价值观目标:1. 学生培养对工程技术的兴趣和热情,树立正确的工程观念。
2. 学生在团队合作中发挥个人优势,培养沟通协调能力和团队精神。
3. 学生养成严谨、细致的工作态度,遵循工艺规范,提高自身职业素养。
课程性质:本课程为实践性较强的课程,旨在培养学生的动手操作能力和工程实践能力。
学生特点:学生处于中等职业学校或技工学校相关年级,具备一定的理论基础,对实践操作有较高的兴趣。
教学要求:教师应注重理论与实践相结合,充分调动学生的积极性,关注学生的个体差异,提高教学质量。
通过本课程的学习,使学生能够达到上述具体的学习成果,为今后的工作奠定基础。
二、教学内容1. 刻线机基础知识- 刻线机的结构组成与工作原理- 刻线机在工程中的应用领域2. 刻线机操作技能- 操作步骤与使用规范- 参数调整与刻画技巧- 故障排除与日常维护3. 刻线机安全与维护- 安全操作规程与注意事项- 常见故障分析与处理方法- 日常维护与保养措施4. 实践操作与案例分析- 实操练习:直线、曲线等基本线条刻画- 案例分析:实际工程中的应用案例解析- 综合训练:根据图纸进行整体刻画练习教学内容安排与进度:第一课时:刻线机基础知识学习第二课时:刻线机操作步骤与规范第三课时:刻线机参数调整与刻画技巧第四课时:刻线机故障排除与日常维护第五课时:实践操作与案例分析教材章节关联:本教学内容与教材第三章“刻线机的使用与维护”相关,涵盖了该章节的主要知识点,结合实践操作,使学生更好地掌握刻线机的使用和维护。
《平尺刻线机》设计说明书
机械原理课程设计说明书设计题目: 平尺刻线机学院:机械运载与工程学院专业:机械设计制造及其自动化设计者 (组长)指导老师: 2011年5月24日目录一.设计题目及功能 (2)二.设计要求 (2)三.机构运动方案拟定 (3)1.执行机构选定 (3)2.传动方案设计 (5)3.执行机构的运动尺寸设计 (7)4.绘制总的方案图和运动循环图 (8)四.总结 (8)(1)自我方案评价 (8)(2)体会与收获 (8)(3)建议 (9)五.参考资料 (9)一.设计题目及功能(1)题目:平尺刻线机(2)功能:平尺刻线机主要用来实现自动刻线,刻线要求为每隔1毫米刻一条线,刻线长度有8毫米、5毫米、3毫米三种类型。
第一次刻线长度为8毫米,后四次刻线长度为3毫米,第五次刻线长度为5毫米,第六至第九次刻线长度为3毫米,第十次刻线长度为8毫米,以后依此类推。
二.设计要求运动要求:实现“落刀—刻线-抬刀-回刀”的运动。
功能分析:刻线机主要由抬刀机构、刻线机构以及进给机构三部分组成。
抬刀机构用于刻线时将刀具压下,刻线完成之后,通过弹簧使刀具自动抬起,避免磨损;刻线机构用于控制刻线及刻线长度;进给机构用于控制刻线间隔。
且要求刀具具有急回特性。
数据要求:60线/分行程速比K=1.2 刻线功率0.15KW落、抬刀功率:0.05KW 进给攻率:0.1KW三.机构运动方案拟定1.执行机构选定(1)刻线机构:通过顶尖凸轮,根据凸轮三种不同的推程,实现刻线长短的控制,同时,将凸轮推程与回程角度的不同来满足行程速比K=1.2(2)落、抬刀机构:设计一顶尖凸轮,通过凸轮将推杆抬高与回落,实现刀具落、抬刀的动作(3)进给机构:现工作台的间歇进给,控制槽轮转速就可实现没分进给量为1mm机构选用:2.传动方案设计(1)传动方案:采用V带+齿轮传动,将电动机转速减小了需要的转速。
(2)传动总功率的计算:查阅相关资料得:凸轮效率:0.95-0.97 槽轮效率:0.95-0.97铰链效率:0.97-0.99 V带传动效率:0.94-0.969级精度齿轮效率:0.96 螺旋机构效率:0.85-0.95刻线机构:P1=0.15/ (0.95—0.97)/0.96/0.96=0.168—0.171KW抬刀机构:P2=0.05/(0.97—0.99)/(0.95—0.97)=0.052—0.054KW进给机构:P3=0.1/(0.85—0.95)/(0.95—0.97)/0.96/0.96=0.118—0.134KWP(电机)=(P1+P2+P3)/0.96/(0.94—0.96)=0.367—0.398KW (3)电动机的选择根据总功率选择电机,查表得,型号Y90S-6电动机,额定功率为0.75KW,转速为910r/分,效率为72.5%。
机床运动功能方案的创成式设计方法
摘要分析了刀具和工件信息,提出了用刀具位姿矩阵来描述刀具和工件之间的相对运动,并以运动级联矩阵实现刀具位姿矩阵的方法,给出了创成式机床运动功能设计的主要步骤,应用这种方法可以求出所有可能的机床运动功能方案。
以一个三坐标机床运动功能方案的设计为例,说明该方法是有效的。
关键词:运动方案运动设计运动创成机床1 引言机床运动功能设计是机床方案设计中首先要进行的工作,传统的机床运动功能的设计方法主要是以现有的机床设计实例为基础进行经验和类比设计。
这种方法简单,但创新性差,是造成目前机床产品单一化的主要原因。
随着经济的发展,市场对产品的需求是多品种、小批量,为了快速、经济地满足市场需要,从理论上研究并建立不依赖先验知识的机床运动功能的设计方法是非常必要的,这对全新性的机床设计具有重要意义。
今介绍一种基于刀具和工件加工表面信息并通过解析进行机床运动功能设计的方法,即机床运动功能的创成式设计方法。
该方法在二维曲面加工中的应用已在文献[1]中介绍。
本文将介绍这种方法的进一步研究成果,并以一个三坐标机床为例,详细介绍其运动功能方案设计的全过程。
2 刀具工件信息描述方法创成式机床运动功能设计方法的基础是刀具切削面的概念[1],刀具切削面是指刀具上能够与被加工表面相对接触的表面,它是一个广义的面,可以是点、线、面(随切削面类型不同而异)。
对于如图1所示的片铣刀加工外圆柱表面的情况,刀具切削面就是绕刀具轴线的圆线;若为圆柱铣刀,其切削面就是一个圆柱面;若为端铣刀,其切削面为平面圆线,等等。
这时的刀具切削面是由刀具自身的回转运动创成,创成这种刀具切削面仅需一个回转运动即可。
图1 片铣刀加工外圆柱面示意图2.1 刀具切削面的数学描述方法采用齐次函数矩阵的形式[2]来描述刀具切削面,如图1中OP 为切削面坐标系,OC为切削面上点的坐标系,XC 坐标指向刀具的实体材料方向,r为刀具的回转半径。
这样可以在OP坐标系中描述刀具切削面如下:(1)其中,CγP=cos(γP),SγP=sin(γP),{x C}C为O C坐标系中点的坐标列阵,{x C}P为O P坐标系中点的坐标列阵,[TPC]为刀具切削面的描述矩阵。
机械原理课程设计刻线机
机械原理课程设计刻线机一、课程目标知识目标:1. 理解并掌握刻线机的基本工作原理,包括传动系统、刻线装置的构成及其功能。
2. 学习并运用机械制图知识,准确绘制刻线机的部件图和装配图。
3. 掌握相关机械零件的设计规范和材料选择原则。
技能目标:1. 能够运用所学的机械原理知识,对刻线机进行简单的拆卸和组装。
2. 通过小组合作,设计并制作一个简化版的刻线机模型,展示其工作原理。
3. 学会使用适当的技术工具和测量工具,对刻线机模型进行调试和优化。
情感态度价值观目标:1. 培养学生对机械设计及制造的兴趣,激发其创新意识和实践探索精神。
2. 增强学生团队协作意识,提高沟通和解决问题的能力。
3. 引导学生关注机械工程在实际生产中的应用,理解技术发展对工业进步的重要性。
课程性质:本课程为实践性强的设计制作课程,结合理论知识和动手操作,旨在加深学生对机械原理的理解,并通过实际操作培养其解决实际问题的能力。
学生特点:考虑到学生处于年级中段,具备一定的机械基础知识和动手能力,但需进一步培养创新设计和团队协作的能力。
教学要求:教学过程中应注重理论与实践相结合,鼓励学生主动探索,同时提供必要的指导和支持,确保学生在完成课程目标的同时,能够达到预期学习成果。
二、教学内容1. 理论知识学习:- 机械原理基础:复习并巩固课本中关于机械传动、摩擦、力矩等基本概念。
- 刻线机原理:学习刻线机的工作原理,分析其传动系统、刻线装置等关键部分的结构与功能。
- 机械设计基础:了解机械零件设计原则,材料选择和应用。
2. 实践操作部分:- 制图实践:结合课本知识,绘制刻线机的部件图和装配图。
- 模型制作:分组进行刻线机模型的制作,包括选购材料、加工零件、组装调试等过程。
- 创新设计:鼓励学生在模型制作过程中进行创新设计,优化刻线机性能。
3. 教学进度安排:- 理论学习:占总课时1/3,重点复习机械原理及刻线机原理。
- 制图实践:占总课时1/3,指导学生完成制图作业。
平尺刻线机课程设计说明书终极版样本
课程设计( 课程实习 )机械设计与制造主体实践(一)院( 系、部) : 机械工程学院姓名: 周天宇同组成员: 沈戊坤梁磊李东金明旭班级: 机电132指导教师签名: 徐林林7 月 10 日·北京目录1.1 机器的功能和设计要求 (3)1.2 工作原理和工艺动作 (4)1.3 拟定运动循环图 (5)1.4 执行机构选型和评定 (6)1.5 机械运动方案示意图 (10)1.6 执行机构的运动尺度设计 (11)1.7 机械传动系统设计 (24)1.8 运动仿真 (26)1.9 飞轮设计 (27)2.0 设计结果得分析…………………………………………………292.1 参考文献 (29)2.2 设计体会 (29)1.1 机器的功能和设计要求在很多具有定量要求的相对移动和相对转动的零件上, 于是需要有指示相对移动或转动量的刻度线。
平尺刻线机主要用于有相对移动零件的刻线工作。
本课题设计经过机械化刻线, 能够达到准确度高、精确度高。
减少了劳动力, 提高了生产效率, 降低成本, 而且在研究时遇到的一些技术问题, 经过认真分析以解决, 在今后的设计类的工作中也有一定的经验可循。
1.机器的功能:平尺刻线机刻出的刻度线长度按十进制规律分为三种, 分别指示一、五和十,并依次重复出现( 如图1.1所示) 。
显然在加工时, 平尺每送进 1 mm, 刻刀刻线一次, 且能自动改变刻线长度。
为了实现以上功能, 平尺刻线机整体工作应分为三种: (1) 刀具刻线工作( 主工作) (2) 刀架升降工作( 辅助工作)(3) 平尺送进工作( 辅助工作)2. 原始数据及设计要求:(1) 平尺毛坯的轮廓尺寸为: 1040×30mm (长×宽)。
(2) 要求在平尺毛坯上按一定规律刻出不同长度的线条: 短线10mm; 中线13mm; 长线18mm 。
相邻两条刻线之间的距离为1mm 。
从零起隔四条短线刻一条中线, 隔九条刻线刻一条长线, 然后依次重复。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平尺刻线机运动设计方案一、工作原理及工艺动作过程在很多具有定量要求的相对移动和相对转动的零件上,需要有指示相对移动或转动量的刻度线。
平尺刻线机主要用于有相对移动零件的刻线工作。
刻度线长度按十进制规律分为三种,分别指示一、五和十,并依次重复出现。
图1所示的钢板尺就是用平尺刻线机加工的。
显然在加工时,平尺每送进1 mm ,刻刀刻线一次,且能自动改变刻线长度。
因此,平尺刻线机主体工作机构是刻线机构(主运动)和平尺送进机构(辅助运动)。
二、原始数据及设计要求(1) 平尺毛坯的轮廓尺寸(图1)为:1040×30mm(长×宽)。
(2) 要求在平尺毛坯上按一定规律刻出不同长度的线条:短线10mm ;中线13mm ;长线18mm 。
相邻两条刻线之间的距离为1mm 。
从零起隔四条短线刻一条中线,隔九条刻线刻一条长线,然后依次重复。
图1 钢板尺(3)刻线深度为0.5mm,深度要均匀,为防止刀具磨损,要求反行程有抬刀运动.(4)行程速度变化系数K≥1.2。
(5)刻线机构为了保证刻线质量,应尽可能使刻刀在刻线行程内匀速运动。
抬刀机构必须与刻线机构运动协调,即在刻线完成点抬刀,在刻线起始点落刀。
为保证落刀时刀尖不碰到平尺坯上,刻刀在刻入尺坯前应有一定距离的空程,在设计时主运动的行程应考虑这段距离(可取为3~4mm)。
(6)自动改变行程长度的附加机构必须与进给运动联系起来,即每进给四次,第五次行程由短程变为中程,再进给四次短程,第五次时变为长程,完成一次循环。
显然在进给机构和行程控制机构之间,需要一个计数机构来实现循环的控制。
这一计数机构要求简单实用,灵活可靠,且必须是一种纯机械式的设计方案。
三运动分析1.运动要求:实现“抬刀—刻线-抬刀-刻线”的运动。
2.功能分析:刻线机主要由抬刀机构、刻线机构以及进给机构三部分组成。
抬刀机构用于刻线时将刀具压下;刻线机构用于刻线,刻线机构要有急回特性。
;进给机构用于控制刻线间隔以及改变刻线长度。
四机构运动方案拟定1.刻线机构的方案选定方案一:工作台此方案为六杆机构,曲柄摇杆机构与摇杆滑块机构的组合。
主要优点为:运动副为低副,磨损小,且制作简便,可以传递远距离的动作。
主要缺陷:惯性力和惯性力矩不易平衡,设计比高副机构复杂,有时为了满足需要需要增加运动副的数目,会产生运动误差,影响传动精度。
方案二:刀具工作台下的圆柱体实现匀速转动,在圆柱外表面开槽,通过槽位置的设定和工作台下杆和槽的配合实现可控的往复运动和其急回特性,上图就为展开的圆柱外圆槽曲线。
优点:结构简单且可实现可控往复运动的功能要求,且有急回特性。
缺点:此方案需要的圆柱体较大,效率低,磨损问题较为严重,运动过程中可能会出现卡死现象,较为危险。
方案三工作台通过凸轮控制载刀台的水平方向的前后刻线运动从而完成刻线。
主要优点:只要设计出适当的凸轮轮廓,即可使从动件实现任意预期的运动规律,完全可以实现刀具在刻线时匀速运动。
并且结构简单,紧凑,工作可靠。
缺点:凸轮为高副接触,容易磨损,凸轮轮廓加工比较困难,费用较高。
综合上面的分析,由于刻线机构大部分为低速机构,又要求精度较高,且结构紧凑,工作可靠,同时要求刻线时匀速运动。
所以最后决定选择方案(3)的凸轮刻线机构。
2 抬刀机构的方案选定方案一此方案存在明显不足:由于是靠弹簧来实现抬刀落刀的,所以刻线深度容易存在较大误差。
方案二此方案与上面同样存在刻线深度精度不够的问题。
方案三用此连杆机构会增大机构所占空间,且比较复杂。
方案四仍采用凸轮机构完成抬刀落刀运动,且能完全控制刀具运动规律,结构紧凑。
综上,选取方案四为抬刀机构。
3 工作台进给机构方案的选用方案一简单的槽轮机构就可以实现间歇的转动,带动丝杆间歇转动,来实现工作台的间歇进给优点:同样具有结构简单,传力较小,运动灵活的优点。
缺点:磨损较严重。
方案二曲柄摇杆机构与外棘轮组合机构,通过右面的棘轮把间歇的转动传递出去。
优点:结构简单,传力较小,运动灵活,,利用曲柄摇杆机构可实现右轮的往复转动。
缺点:结构简单但不紧凑。
综上,这里选择方案二。
4 工作台上安放塔轮来实现改变刻线长度塔轮造型如下图工作时刀具从内向外刻线,刻短线时水平杆抵在内圆上,每刻四个短线,水平杆抵在中圆上,钢尺平台向刀具(图中是向右)移动刻出中线;同理刻出长线。
这里,用一个棘轮控制塔轮的间歇转动。
工作台每进给一次拨动此棘轮转动一次,并传递给塔轮,使它配合工作台间歇运动。
综上,机构整体运动为下图五机构的运动循环图为六刻线机构两凸轮轮廓参数的确定刀具的运动轨迹如下:说明:(1)刀具分为水平方向和竖直方向的两个分运动。
(2)刀具水平运动抬刀后要有急回运动。
(3)刀具水平匀速运动的距离为最长刻线的长度18mm ,这样保证了刻线的均匀。
这里靠载钢尺的工作台的左右移动完成刻线长度的改变,靠钢尺进给运动完成刻线。
(4)黑线为刀具 黄线为刀具运动轨迹 蓝线为刻线 。
1.控制刀具水平运动凸轮轮廓(对心尖顶从动件盘型凸轮机构)的设计这里采用解析法第一步:设计从动件的运动规律: 运动参数的设定:凸轮转角为ø 角速度ω为 (4*л/3)rad/s = 240度/s Vmax=V 刻线=24mm/s 行程速比系数K=2.6 t 工作=1.083s t 回程=5/12s Hmax=22mm H 刻线=18mm 速度v 解析式如下: 0≤Ø≤2лv1=12-12cos(9ø/2) 0≤ø≤2л/9 v2=24 2л/9≤ø≤11л/9V3=12-12cos(9ø/2-9л/2) 11л/9≤ø≤13л/9 V4=5264cos(518ø-526л)-526413л/9≤ø≤2л位移s 的解析式如下:S1=9ø/л-2sin(9ø/2)/л 0≤ø≤2л/9S2=18ø/л-2 2л/9≤ø≤11л/9S3=9ø/л+9-2sin(9ø/2) 11л/9≤ø≤13л/9S4=22+11sin(18ø/5-26л/5)/л-198(ø-13л/9)/5/л) 13л/9≤ø≤2л加速度a的解析式如下:a1=72лsin(9ø/2) 0≤ø≤2л/9a2=0 2л/9≤ø≤11л/9a3=-72лsin(9ø/2-11л/2) 11л/9≤ø≤13л/9a4=-72лsin(18ø/5-26л) 13л/9≤ø≤2л写入MATLAB程序可以生成数据和图像见附录第二步:设计凸轮曲线轮廓凸轮基圆半径的选择方法:1.采用理论计算.Rmin=√((ds/dø e/tgα-s)2+2e)α=[α]=30度代入数据计算得Rmin>=30mm2 使用诺顿图这里选取基圆半径Ro=50mm (凸轮轮廓曲线见后面附录) 2.控制抬刀的凸轮(对心尖顶盘型凸轮机构)曲线轮廓的设计(使用图解法)这里基圆半径r=20mm(经由前面计算得到) H=3.5mm位移s 的解析式如下:S1=99102350000ø-47лsin(99102200000лø) 0≤ø≤10000099102S2=27 10000099102 ≤ø≤11л/9S3=47лsin(9ø-11л)-463лø+49111л/9≤ø≤13л/9S4=0 13л/9≤ø≤2л速度v 的解析式如下:V1=2973061400000л-2973061400000лcos(99102200000ø) 0≤ø≤10000099102V2=0 10000099102≤ø≤ 11л/9V3=21cos(9ø-11л)-21 11л/9≤ø≤13л/9 V4=0 13л/9≤ø≤2л 加速度a 的解析式如下:a1=9x 99102112000002p sin(99102200000ø) 0≤ø≤10000099102 a2=010000099102≤ø≤11л/9 a3=-252лsin(9ø-11л) 11л/9≤ø≤13л/9 a4=0 13л/9≤ø≤2л 画出其位移s 图线:将各段分5份使用’反转法 ’ 画出轮廓曲线 曲线轮廓见下图七传动机构方案的设计刻线机构主轴转速n1=40r/min 进给间歇机构主轴转速n2=80r/min 首先选择电动机,常用的电动机型号如下表:电动机转速确定取带传动的传动比i b=2~4,齿轮传动的传动比i g=3~5,则传动装置的总传动比为:i=i b i g=(2~4)×(3~5)=6~20故得电动机的转速范围为:n=80x(6~20)=480-1600r/min查表,选择选用Y90L-4的电动机转速为1500r/m取带传动的传动比为4.两个传动比分别为刻线机构i1=37.5, 进给机构i2=18.75 传动图如各个齿轮的齿数见上图。
八附录:MATLAB的运行程序以及图像1 控制水平运动的凸轮的MATLAB成效位移程序:x=[0:0.01:2*pi];y=(9/pi*x-2/pi*sin(9*x/2)).*(x>=0&x<2*pi/9)+(18*x/pi-2).*(x>=2*pi/9&x <11*pi/9)+(9*x/pi+9-2*sin(9*x/2-9*pi/2)/pi).*(x>=11*pi/9&x<13*pi/9)+( 22+11/pi*sin(18*x/5-26*pi/5)-198*(x-13*pi/9)/5/pi).*(x>=13*pi/9&x<=2* pi);plot(x,y)grid onxlabel('转角\phi(弧度)')ylabel('位移s(毫米)')title('位移运动规律')其图像为:速度程序:x=[0:0.001:2*pi];y=(12-12*cos(9*x/2)).*(x>=0&x<2*pi/9)+(24+0*x).*(x>=2*9&x<11*pi/9)+(1 2-12*cos(9*x/2-9*pi/2)).*(x>=11*pi/9&x<13*pi/9)+(264/5*cos(18/5*x-26* pi/5)-264/5).*(x>=13*pi/9&x<=2*pi);plot(x,y)grid onxlabel('转角\phi(弧度)')ylabel('速度v(毫米每秒)')title('速度运动规律')其图像为:加速度程序为:x=[0:0.001:2*pi];y=(72*pi*sin(9*x/2)).*(x>=0&x<2*pi/9)+(0).*(x>=2*pi/9&x<11*pi/9)+(-72 *pi*sin(9*x/2-11*pi/2)).*(x>=11*pi/9&x<13*pi/9)+(-72*pi/25*sin(18/5*x -26/5*pi)).*(x>=13*pi/9&x<=2*pi);plot(x,y)grid onxlabel('转角\phi(弧度)')ylabel('加速度a(毫米每二次方秒')title('加速度运动规律')其图像为:2 控制竖直方向运动的凸轮位移程序为:x=[0:0.001:2*pi];y=(7/2/99102*100000*x-7/2/2/pi*sin(2*pi*x*100000/99102)).*(x>=0&x<991 02/100000)+(7/2).*(x>=99102/100000&x<11*pi/9)+(7/4/pi*sin(9*x-11*pi)-63/4/pi*x+91/4).*(x>=11*pi/9&x<13*pi/9)+(0).*(x>=13*pi/9&x<=2*pi); plot(x,y)grid onxlabel('转角\phi(弧度)')ylabel('位移s(毫米)')title('位移运动规律')其图像为:速度程序为:x=[0:0.001:2*pi];y=(14*100000*pi/99102/3-14*100000*pi/99102/3*cos(2*pi*100000*x/99102) ).*(x>=0&x<99102/100000)+(0).*(x>=99102/100000&x<11*pi/9)+(21*cos(9*x -11*pi)-21).*(x>=11*pi/9&x<13*pi/9)+(0).*(x>=13*pi/9&x<=2*pi);plot(x,y)grid onxlabel('转角\phi(弧度)')ylabel('速度v(毫米每秒)')title('速度运动规律')其图像为;加速度程序为:x=[0:0.001:2*pi];y=(7*pi*pi*pi*16*100000*100000/9/99102/99102*sin(2*pi*100000*x/99102) ).*(x>=0&x<99102/100000)+(0).*(x>=99102/100000&x<11*pi/9)+(-252*pi*si n(9*x-11*pi)).*(x>=11*pi/9&x<13*pi/9);plot(x,y)grid onxlabel('转角\phi(弧度)')ylabel('加速度a(毫米每二次方秒)')title('加速度运动规律')其图像为:在这里附上数据表:表一控制水平方向运动的凸轮(用于解析法)凸轮转角(角度值)廓线坐标X(毫米)廓线坐标Y(毫米)0 2.718282 5010 11.368049 48.81744820 19.77964 46.3963930 27.879022 42.85131940 35.50728 38.08703350 42.347633 31.98541960 48.124513 24.64589970 52.612801 16.25675980 55.621259 7.04731390 57 -2.718282 100 56.646825 -12.748579 110 54.512157 -22.733538 120 50.602383 -32.354101 130 44.981433 -41.292369 140 37.770507 -49.242033 150 29.145899 -55.918741 160 19.33494 -61.070035 170 8.610147 -64.484529 180 -2.718282 -66190 -14.311413 -65.510095 200 -25.811719 -62.969391 210 -36.854101 -58.396612 220 -47.077457 -51.875833 230 -56.098252 -43.523558 240 -63.398273 -33.464209 250 -68.54074 -22.054054 260 -71.378183 -9.825684 270 -71.858076 2.718282 280 -69.380426 14.993857 290 -63.655402 26.061407 300 -55.156011 34.983139 310 -44.981433 41.292369 320 -34.390681 45.214113 330 -24.28088 47.492282 340 -14.912606 48.919774 350 -6.030069 49.85218 360 2.718282 50表二控制竖直方向运动的凸轮(用于图解法)凸轮转角(角度值)位移(从基圆开始毫米)0 010 0.11831420 0.78677430 1.9478840 2.99999450 3.46186260 3.570 3.580 3.590 3.5100 3.5110 3.5120 3.5130 3.5140 3.5150 3.5160 3.5170 3.5180 3.5190 3.5200 3.5210 3.5220 3.5230 3.182042240 1.75250 0.317958260 0270 0280 0290 0300 0310 0320 0330 0340 0350 0360 0附加的六杆机构运动分析课程设计一六杆机构的尺寸及示意图二解析法L1=15, L2=80,L3=65,L4=70,X=65,Y=65. (1)曲柄摇杆机构的运动分析 位移分析:L3cos(β)-X=L1cos(ø)+L2cos(α) L3sin(β)+Y=L1sin (ø)+L2cos(α); 由此式子可以解出α,β令A1=23L -22L +))sin(1(2φL Y -+))cos(1(2φL X +B1=2L3(Y-L1sin(ø)) C1=2L3(X+L1cos(ø)) 可以得出β=2atan[(B1+)]11/()111(222C A C A B --++-α=arcsin[(Y+L3sin β-L1sin ø)/L2] 对上式求导可得L2和L3的转速ω2和ω3如下⎥⎦⎤⎢⎣⎡--βαβαcos 3cos 2sin 3sin 2L L L L ⎥⎦⎤⎢⎣⎡32ωω=⎥⎦⎤⎢⎣⎡ϕωϕωcos 2sin 1L L 再对上式求导可得到L2和L3的角加速度a2和a3⎥⎦⎤⎢⎣⎡--βαβαcos 3cos 2sin 3sin 2L L L L ⎥⎦⎤⎢⎣⎡32a a =⎥⎥⎦⎤⎢⎢⎣⎡++--+βαϕβαϕωωωωωωsin 3sin 2sin 1cos 3cos 2cos 1222222L L L L L L (2)摇杆滑块机构的运动分析按照上面同样的方法可以得到4杆和滑块5的位置 速度 加速度 位移分析θ=arctan[)cos 3/()(cos 34222ββL L L -S=L4sin ø-L3sin β 速度分析⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--ββωωϕϕcos 3sin 3541cos 40sin 4L L L L 角加速度分析⎥⎥⎦⎤⎢⎢⎣⎡++--+=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-ϕββϕββϕϕωsin 4sin 3cos 33cos 4cos sin 33541cos 40sin 443432222L L L a L L a a a L L w w w 三 利用MATLAB 求解 程序如下:l1=15; l2=80; l3=65; l4=70;X=65;Y=65;q=5;j=pi/180;t(1)=0;d=1*j;for i=1:360g=i*d;A1=l3^2-l2^2+(Y-l1*sin(t(1)))^2+(Y+l1*cos(t(1)))^2;B1=2*l3*(Y-l1*sin(t(1)));C1=2*l3*(X+l1*cos(t(1)));m=2*atan((B1+sqrt(B1^2-A1^2+C1^2))/(-A1-C1))+2*pi;ta=-asin((Y+13*sin(m)-l1*sin(t(1)))/l2)+pi;w(i,:)=[t(1) ta m];t(1)=t(1)+d;endfor i=1:360u(2)=(i-1)*d;A=[-l2*sin(w(i,2)),l3*sin(w(i,3));-l2*cos(w(i,2)),l3*cos(w(i,3))]; B=[l1*q*sin(u(2));l1*q*cos(u(2))];om=inv(A)*B;om2=om(1);om3=om(2);om23(i,:)=[u(2) om2 om3];endfor i=1:360u(3)=(i-1)*d;ps=atan(sqrt(l4^2-l3^2*cos(w(i,3)))/(l3*cos(w(i,3))))+pi;S5=l4*sin(ps)-l3*sin(w(i,3));S6(i,:)=[u(3) ps S5];endsubplot(2,2,1);plot(S6(:,1)/j,S6(:,3));grid on;xlabel('转角(角度)');ylabel('位移(毫米)');for i=1:360u(4)=(i-1)*d;A2=[l4*sin(S45(i,2)),0;-l4*cos(S45(i,2)),1];B2=[l3*om23(i,3)*sin(w(i,3));-l3*om23(i,3)*cos(w(i,3))];o=inv(A2)*B2;o4=o(1);ov5=o(2);v6(i,:)=[u(4) o4 ov5];endsubplot(2,2,2);plot(v45(:,1)/j,v45(:,3));grid on;xlabel('转角(角度)');ylabel('速度(毫米每秒)');for i=1:360u(5)=(i-1)*d;A3=[-l2*sin(w(i,2)),l3*sin(w(i,3));-l2*cos(w(i,2)),l3*cos(w(i,3))];B3=[q^2*l1*cos(u(5))+(om23(i,2))^2*l2*cos(w(i,2))-(om23(i,3))^2*l3*co s(w(i,3));-q^2*l1*sin(u(5))-(om23(i,2))*l2*sin(w(i,2))+(om23(i,3))^2* l3*sin(w(i,3))];oa=inv(A3)*B3;a2=oa(1);a3=oa(2);a23(i,:)=[u(5) a2 a3];endfor i=1:360u(6)=(i-1)*d;A4=[l4*sin(S45(i,2)),0;-l4*cos(S45(i,2)),1];B4=[(a23(i,3))*l3*sin(w(i,3))+(om23(i,3))^2*l3*cos(w(i,3))-(v45(i,2)) ^2*l4*cos(S45(i,2));-(a23(i,3))*l3*cos(w(i,3))+(om23(i,3))^2*l3*sin(w (i,3))+(v45(i,2))^2*l4*sin(S45(i,2))];xa=inv(A4)*B4;a4=xa(1);a5=xa(2);a6(i,:)=[u(6) a4 a5];endsubplot(2,2,3);plot(a6(:,1)/j,a6(:,3))grid onxlabel('转角(角度)')ylabel('加速度(毫米每二次方秒)')其图线如下图:四矢量方程图解法检验经验证符合。